Wykład 11
14.4 Siły wynikające z prawa Lorentza i Biota-Savarta c.d.
14.5 Prądy polaryzacyjne w dielektrykach.
15. Magnetyczne własności materii
15.1 Momenty magnetyczne atomów i cząsteczek
15.2 Zależność pomiędzy magnetyzacją M a prądem
cząsteczkowym jmol.
15.3 Wektor natężenie polamagnetycznego H.
15.4 Zdolność magnetyzacji materii
15.5 Pole magnetyczne na granicy ośrodków.
15.6 Obwody magnetyczne - Elektromagnes
16. Zjawisko indukcji elektromagnetycznej
16.1 Prawo indukcji Faraday’a
16.2 Prądy indukcyjne, reguła Lenza
Reinhard Kulessa
1
16.3 Prądy wirowe
16.4 Zjawisko indukcji wzajemnej
Reinhard Kulessa
2
14.5 Prądy polaryzacyjne w dielektrykach.
Na ostatnim wykładzie stwierdziliśmy, że udział w
powstawaniu pola indukcji magnetycznej mają wszystkie
możliwe prądy. Rozważaliśmy jednak do tej pory jedynie
prądy stacjonarne, czyli niezależne od czasu. Różniczkowe
prawo Ampera możemy sformułować następująco:
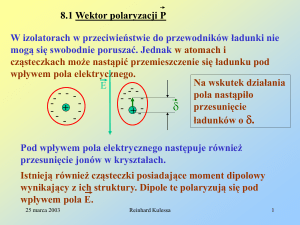
Zastanówmy się co dzieje się w dielektryku przy włączaniu pola
elektrycznego.
rot B 0 ( j przew jmol j pol )
Włączenie pola powoduje
przesunięcie ładunku
dE/dt 0
neutralne atomy
E = const
-+ -+ -+
-+ -+ -+
-+ -+ -+
-+ -+ -+
uszeregowane dipole
Reinhard Kulessa
ładunek
powierzchniowy
E=0
3
W chwili gdy włączamy pole w czasie dt przepływa przez jednostkę
powierzchni ładunek . Możemy więc powiedzieć, że przepływa
wtedy prąd związany z polaryzacją o natężeniu;
j pol
P
P
t
t
.
Możemy więc napisać, że gęstość prądu polaryzacyjnego
wynosi:
P
j pol
t
Wektor polaryzacji związany jest z wektorem natężenia pola
elektrycznego zależnością (8.5) , czyli
P 0 ( 1) E
Reinhard Kulessa
(8.5)
4
Wprowadzając tą zależność do naszych rozważań, otrzymujemy
równanie;
j pol
E E próż .
0
t
t
W próżni prawa część równania powinna zniknąć. Doświadczenie
pokazuje, że również w próżni istnieje człon E t .
Różniczkowe prawo Ampera przyjmuje więc ogólnie postać:
E
rot B 0 ( j przew jmol 0 )
t
(14.21)
Powyższe równanie jest równocześnie I prawem Maxwella.
Reinhard Kulessa
5
15. Magnetyczne własności materii
15.1 Momenty magnetyczne atomów i cząsteczek
W równaniu (14.16) podaliśmy definicję orbitalnego
momentu magnetycznego. pM gL
Moment pędu (rysunek obok) jest
z L
z
wielkością skwantowaną.
2
Lz me r m
m 0,1,2,....
r
e
= 1.0546 ·10-34 Js
Orbitalny moment magnetyczny jest równy:
p
l
Mz
e
m
2me
Reinhard Kulessa
6
Do tego dochodzi własny-spinowy moment magnetyczny;
pMs z B
W atomach wieloelektronowych momenty orbitalny i spinowy
dodają się do wypadkowego momentu magnetycznego pM.
Wartość tego momentu definiuje własności magnetyczne
materiału.
Gdy pM ≠ 0 ----- materiał jest paramagnetykiem,
Gdy pM = 0 ----- materiał jest diamagnetykiem.
Przyłożenie do jakiegoś materiału zewnętrznego pola indukcji
magnetycznej B, powoduje polaryzację dipoli magnetycznych
występujących w tym materiale. Pojawia się wtedy wielkość,
którą nazywamy magnetyzacją M.
magn. mom. dip.
M
jedn. obj.
Reinhard Kulessa
7
15.2 Zależność pomiędzy magnetyzacją M a prądem
cząsteczkowym jmol.
Załóżmy, że mamy jednorodnie namagnesowany cylinder.
Cały cylinder posiada magnetyczny
M
A
moment dipolowy pM = M · l · A.
Magnetyzacja ma miejsce dlatego, że
atomowe momenty dipolowe są
l
ustawione równolegle do osi cylindra.
Wewnątrz cylindra prądy atomowe
kompensują się.
I
Na powierzchni powstaje nie
skompensowana składowa prądu
powierzchniowego I.
Reinhard Kulessa
8
Jeśli podzielimy cylinder na dyski o wysokości l, to
opływa go prąd I· l/l, dając moment magnetyczny;
l
pM I
A
pM
A
l
l
I ·l/l
Magnetyzacja tej płytki wynosi;
| p M |
I
M
A l
l
(15.2)
Znaleźliśmy więc związek pomiędzy prądami molekularnymi a
magnetyzacją. Przyczyniają się do niej składowe
powierzchniowe tych prądów. Można pokazać , że ogólna postać
zależności pomiędzy prądami molekularnymi a magnetyzacją,
ważna również dla niejednorodnej magnetyzacji ma postać:
jmol rot M
Reinhard Kulessa
(15.3)
9
M
A
Prawdziwość równania (15.3) możemy
wykazać następująco. Dla równania (15.3)
możemy definiując powierzchnię A = s·l napisać:
jmol dA rot M dA
A
l
A
Lewa całka w tym równaniu jest = 0 dla
powierzchni A1 , lecz jest równa I dla powierzchni
A2 . Prawa całka jest zgodnie z twierdzeniem
Stokes’a równa:
I
rot M dA M ds
M
A
s
Mamy wtedy:
l
A1
1
A2
2
M ds M l M l 0
1
M ds M l 0 l I
2
Reinhard Kulessa
I=I
cbdo.
10
15.3 Wektor natężenie polamagnetycznego H.
Jeśli wprowadzimy znalezioną postać wektora gęstości prądu
molekularnego jmol do I równania Maxwella, to otrzymamy:
D
rot B 0 j przew 0
0 rot M
t
Równanie to możemy zapisać również jako:
B
D
rot M j przew
t
0
(15.4)
Natężeniem pola magnetycznego H nazywamy wyrażenie:
Jednostką natężenia pola
magnetycznego jest [A/m].
H
B
0
M
Reinhard Kulessa
(15.5)
11
15.4 Zdolność magnetyzacji materii
Zgodnie z równaniem (15.5) możemy wyrazić wektor indukcji
magnetycznej przez wetor natężenia pola magnetycznego.
Otrzymamy zależność
B( H ) 0 ( H M )
Równanie to zawiera w sobie skomplikowane bardzo
często własności materii.
A). paramagnetyki
Pamiętamy związek pomiędzy indukcją magnetyczną B a
natężeniem pola magnetycznego H analogiczny do związku
między D a E w elektrostatyce. Ma on postać:
B o H
Reinhard Kulessa
12
0 jest przenikalnością magnetyczną próżni, a jest
względną przenikalnością magnetyczną ośrodka.
Z ostatnich dwóch równań możemy znaleźć zależność
między magnetyzacją a natężeniem pola magnetycznego.
0 H 0 ( H M )
M ( 1) H
M H
Współczynnik = ( - 1) jest podatnością magnetyczną.
Dla paramagnetyków podatność magnetyczna > 1
Jeśli posiadamy substancję paramagnetyczną, która posiada n
atomów na jednostkę objętości, a każdy atom ma dipolowy
moment magnetyczny równy m to magnetyzacja tej substancji
wynosi;
Reinhard Kulessa
13
mB n m 2 ,
M nm
B
3kT 3kT
(15.6)
Gdzie wyrażenie mB/3kT oznacza ułamek dipoli
magnetycznych ustawionych równolegle do pola indukcji B.
Stosunek
0 M
(15.7)
B
nazywamy podatnością magnetyczną substancji.
W oparciu o równania (15.6) i (15.5) możemy napisać:
n m2
0
3kT
Reinhard Kulessa
(15.8)
14
Należy również zauważyć, że podatność magnetyczna dla
paramagnetyków zmienia się z temperaturą zgodnie z
prawem Curie.
Dla paramagnetyków 10-9 – 10-3, a 1.
B
M
H
H
b). diamagnetyki
W diamagnetykach magnetyczne momenty orbitalne i
spinowe kompensują się. Zewnętrzne pole indukcji
magnetycznej indukuje prądy kołowe o kierunku takim, że
dipolowe momenty magnetyczne tych prądów są
antyrównoległe do zewnętrznego pola.
Reinhard Kulessa
15
Podatność magnetyczna jest dla diamagnetyków ujemna i
niezależna od temperatury.
M
H
C). ferromagnetyki
Dla ferromagnetyków >> 1∼104, >>0. Zależność B(H)
pokazuje zjawisko histerezy.
Reinhard Kulessa
16
B(M)
BR
H
HK
Krzywą histerezy
charakteryzują dwie
wielkości, remanencja BR,
oraz koercja HK.
Ferromagnetyzm znika
powyżej temperatury Curie.
Temperatury Curie wynoszą
przykładowo dla Gd-200 C,
Dla Ni-3580 C, dla Fe-7700 C,
Co- 11310 C.
B
TC T
Reinhard Kulessa
17
15.5 Pole magnetyczne na granicy ośrodków.
Analogicznie do rozważań nad przebiegiem wektora natężenia
pola elektrycznego E, oraz wektora przesunięcia D na granicy
dwóch ośrodków o różnych stałych dielektrycznych, możemy
zbadać zachowanie się wektorów B i H na granicy dwóch
ośrodków o różnych przenikalnościach magnetycznych 1 i 2 .
Stosując dla składowych równoległych wektora natężenia
pola magnetycznego H 1|| i H 2|| prawo Ampera wiedząc, że w
obszarze granicznym nie płyną prądy przewodnictwa,
uzyskujemy następująca zależność:
H H
||
1
1
1
B
||
1
||
2
1
2
||
2
B
Reinhard Kulessa
.
(15.9)
18
Z kolei wiedząc, że pole indukcji magnetycznej B jest
bezźródłowe, czyli posiada zerowa dywergencję , uzyskujemy
stosując do składowych B 1 i B 2 prawo Gaussa, następujące
zależności;
B1⊥ B⊥2
1 H 2 H
⊥
1
1
2
2
.
(15.9a)
W oparciu o powyższe wzory
otrzymujemy również;
1
B1
⊥
2
B2
tg 1 1
tg 2 2
Reinhard Kulessa
(15.10)
.
19
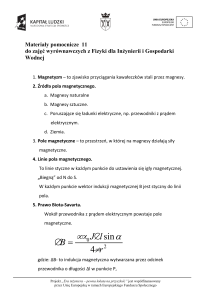
15.6 Obwody magnetyczne - Elektromagnes
Pole magnetyczne zwykle jest skupione w ograniczonych
obszarach, tworzących elementy obwodów magnetycznych.
Obwody magnetyczne posiadają swoje opory magnetyczne .
Dla oporów tych można podać odpowiedniki prawa Ohma i
Kirchoffa dla obwodów elektrycznych, zwanych prawami
Hopkinsa. Omówmy dla przykładu pole magnetyczne w
elektromagnesie ze szczeliną powietrzną o długości x.
I
r
x
1). Prąd o natężeniu I jest źródłem
pola H. H⊥ zmienia się na granicy
rdzeń-szczelina. Z prawa Ampera
mamy:
H dl NI H Fe (2 r x) H pow x
2). Pole B jest bezźródłowe, tzn.
D<<r
BFe B pow H Fe H pow
Reinhard Kulessa
20
Otrzymujemy więc:
H pow
1
(2 r x) H pow x NI
NI
H pow
2 r x x
H Fe H pow /
Bezźródłowość pola indukcji magnetycznej daje nam:
B BFe B pow 0 H pow
W związku tym:
NI
NI
B pow 0
0
2 r x x
2 r x
Otrzymujemy więc silne wzmocnienie pola w szczelinie
(>>1).
Reinhard Kulessa
21
16. Zjawisko indukcji elektromagnetycznej
W rozdziale tym będziemy mówili o efektach towarzyszących
zmianom pól elektrycznych i magnetycznych. Stwierdzimy też z
zawsze należy rozważać pola elektryczne i indukcji
magnetycznej nierozdzielnie. Pole elektryczne i magnetyczne są
bowiem dwoma formami jednej wielkości fizycznej- pola
elektromagnetycznego.
16.1 Prawo indukcji Faraday’a
Omawianie prawa indukcji Faradaya możemy
przeprowadzić na dwa sposoby. Pierwszy opiera się na
doświadczeniach demonstrujących zjawisko indukcji
elektromagnetycznej, czyli wzbudzania przez pole
magnetyczne prądu elektrycznego w zamkniętym obwodzie.
Drugie podejście opiera się na rozważaniach dotyczących II
równania Maxwella.
Reinhard Kulessa
22
Tę drogę obierzemy w tym wykładzie.
II równanie Maxwella mówi, że:
B .
rot E
t
(16.1)
Doprowadźmy to równanie do postaci całkowej. Otrzymamy
wtedy:
(16.2)
rot E dA E dl
B dA
A
t A
Występująca we wzorze (16.2) całka
B dA M
A
jest niczym innym jak definicją strumienia indukcji
magnetycznej.
Reinhard Kulessa
23
Z wielkością tą zapoznaliśmy się już poprzednio.
Jednostką strumienia indukcji magnetycznej jest [M]=[1
Weber] = [V·s].
Przedyskutujmy równanie (16.2).
1. Dla jednej pętli istnieje
dowolnie wiele powierzchni
A.
B
dA
B
A
dl
2. Kierunek dA jest dany
regułą śruby prawej, w
połączeniu z kierunkiem
całkowania po pętli . Dla
powierzchni skierowanej w
dół, wektor dA byłby
skierowany do wnętrza
powierzchni A.
Reinhard Kulessa
24
3. Spotykamy się tu po raz pierwszy z wirem natężenia pola
elektrycznego E, gdyż najwyraźniej
E dl 0.
Oznacza to, że wytworzone zmienne w czasie pole E nie jest
zachowawcze, tzn. nie da się go utworzyć jako gradientu
skalarnego potencjału. Nie jest to jednak w sprzeczności z
tym co wiemy z elektrostatyki. Mamy bowiem do czynienia z
polami zmiennymi w czasie, a nie stacjonarnymi.
Jeżeli we wzorze (16.2) zastąpimy pętlę pętlą przewodzącą,
to w rezultacie otrzymamy mierzalną wielkość
ind
E
d
l
V
0
.
Reinhard Kulessa
25
Wir wektora natężenia pola elektrycznego E istnieje jako
następstwo zmiany strumienia pola magnetycznego zawsze,
niezależnie od tego, czy „zmaterializujemy” czy nie drogę
całkowania.
Możemy więc już napisać prawo indukcji Faradaya. Siła
elektromotoryczne indukcji i wyraża się wzorem:
M
ind
i V0 B dA
t A
t
(16.3)
Przy pomocy prostego układu możemy wykonać kilka
doświadczeń demonstrujących zjawisko indukcji
elektromagnetycznej. Układ doświadczalny pokazany jest na
następnym rysunku.
Reinhard Kulessa
26
2
B
3
+
4
1
Układ składa się z pętli
połączonej z
galwanometrem, oraz
solenoidu połączonego ze
źródłem prądu
stałego.Pętlę możemy:
1. poruszać zarówno w
kierunku pionowym
2. jak i poziomym,
3. możemy również zmieniać
jej kształt
4. możemy ją obracać
względem osi poziomej.
Jeśli chodzi o solenoid będący źródłem indukcji magnetycznej,
to możemy nim też wykonywać ruchy 1 i 2, jak również przez
zmianę natężenia prądu możemy możemy zmieniać wartość
statyczną wektora indukcji magnetycznej, oraz zmieniać ją w
czasie.
Reinhard Kulessa
27
Przy wykonaniu wszystkich doświadczeń zmienia się strumień
wektora indukcji pola magnetycznego przez dowolną
powierzchnie A rozpiętą na pętli .
Obieg pętli uważamy za dodatni, jeśli jest on związany z
kierunkiem wektora indukcji B regułą śruby prawej.
W naszym doświadczeniu odpowiada temu odpowiednie
wychylenie galwanometru.
Rozważmy bliżej dwa przypadki.
a) Zmiana powierzchni pętli.
Dla takiego przypadku możemy siłę elektromotoryczną
indukcji wyrazić wzorem;
i
dA
B
dt
Reinhard Kulessa
28
b) Przypadek obracającej się pętli – generator napięcia
zmiennego.
W tym przypadku wektor charakteryzujący powierzchnię obraca
1/2b
a
A
t
B0
oś
i
się wokół osi ⊥ do stałego
wektora indukcji B0 z prędkością
kołową . Mamy więc:
d
i B0 A
dt
d
B0 A cos t
dt
Siła elektromotoryczna
indukcji wynosi więc:
i (t ) B0 A sin t
Reinhard Kulessa
(16.4)
29
Napięcie szczytowe osiąga wartość V=B0·A·
.
i(t)
B0A
t
2/
Prawo indukcji
w postaci (16.3) jest ważne tylko
Faradaya
wtedy, gdy E dl jest jednoznacznie realizowana przez
Gdy mamy zamknięte oczko wokół
przewodnik.
A
punktów A i B, płyną w nim prądy
B(t)
zmieniające w sposób skomplikowany
zewnętrzne pole B(t) .Zawsze jednak
prawdziwe jest równanie;
B
B
rot E
Reinhard Kulessa
30
t
16.2 Prądy indukcyjne, reguła Lenza
Zgodnie z prawem Ohma, siła elektromotoryczna indukcji prowadzi
do przepływu prądu o natężeniu I:
M
IR i
.
t
B(t)
Zgodnie ze wzorem (16.2) mamy bowiem:
I
A
dl
1
E dl j d l
1 I
l
dl I
IR
A
A
Widzimy wobec tego jednoznacznie, że:
M
ind
I R i
t
Reinhard Kulessa
31
Kierunek prądu indukcyjnego określa Reguła Lenza.
Mówi ona, że:
Kierunek prądu indukcyjnego jest taki, że powstająca w
wyniku przepływu prądu indukcyjnego siła Biota – Savarta
działa przeciwko zachodzącym zmianom strumienia
magnetycznego.
Możemy to zilustrować przy pomocy pętli, w której
wywołujemy prąd indukcyjny przy pomocy magnesu.
I
N
v
S
N
I
S
N
S
v
N
S
I. Pola magnesu i pętli
przyciągają się.
II. Pola magnesu i pętli
odpychają się.
Reinhard Kulessa
32
Rozważmy następujący układ. Mamy dwa przewodniki połączone
ruchomym prętem. Całość znajduje się w polu indukcji
magnetycznej prostopadłym do płaszczyzny przewodników i pręta.
Zwrot wektora indukcji jest zaznaczony na rysunku.
Poruszamy prętem ze stałą prędkością w lewo. W czasie dt strumień zmienia
się o B · dA=B · l· dx = B ·l · v0 · dt.
I
dx
B
l
I
v0 dA
I
F
R
Reinhard Kulessa
Otrzymujemy więc
zgodnie z prawem
V Faradaya siłę
elektromotoryczną
indukcji równą:
33
dA
dx
ind
ind
I R i V0 B B l B l v0
dt
dt
Napięcie to jest przyłożone do oporu R, przez który płynie prąd
indukcyjny Iind . Na oporze wydziela się ciepło Joule’a. Moc
wydzielona w przewodniku,
I
zgodnie z równaniem (9.23)
jest równa:
I
Bv
I
0 dA
F
R
V
dW
Pe
I i I B l v0
dt
Ze względu na zasadę zachowania
energii na jednostkę czasu musi zostać wykonana praca
mechaniczna związana z przesunięciem pręta.
Pm F v0
Reinhard Kulessa
34
Ponieważ Pe = Pm , otrzymujemy więc:
F I Bl
.
Jest to znana nam już siła Biota – Savarta. Siła ta wynika więc
z prawa indukcji Faradaya i zasady zachowania energii.
Zgodnie z regułą Lenza siła ta sprzeciwia się zmianom
strumienia pola magnetycznego.
W oparciu o
regułę
Lenza
można
zbudować
silnik
liniowy.
m
Reinhard Kulessa
35
Po włączeniu prądu, pręt będzie przesuwał się w lewo, a
równocześnie zmienia się strumień indukcji magnetycznej.
W prosty sposób można pokazać, że prędkość
przesuwu pręta równocześnie unoszącego masę m jest
równa:
1
mgR
v
(V0
)
lB
lB
V0 i I R
Prawo Ohma.
Równowaga sił ciężkości i B-S
Siła elektromotoryczna indukcji
mg I l B
i
(16.5)
B l v
V0 B l v
mg
l B
R
Reinhard Kulessa
36
16.3 Prądy wirowe
Załóżmy, że mamy pętlę z dobrego przewodnika, którą chcemy
wysunąć z pola magnetycznego.
N
S
Powstający przy wysuwaniu z pola
pętli, prąd indukcyjny stara się
zachować w niej stały strumień
indukcji magnetycznej. Prowadzi to
do tego, że linie sił pola
magnetycznego są częściowo
zabierane przez wysuwaną z pola
pętlę.
Obliczmy jaka siła jest potrzebna, aby
usunąć z pola magnetycznego o
natężeniu B, pętlę z prądem z
prędkością v.
Reinhard Kulessa
37
F’
v
b
F
R
Płynący w pętli prąd
indukcyjny będzie miał
natężenie:
d dt
Bbv
i
I
R
-F’
R
R
Siła F, którą musimy działać w kierunku v wynosi:
B2 b2
F b ( I B)
v
R
(16.6)
Ruch pętli w polu indukcji magnetycznej doznaje
proporcjonalnej do prędkości siły hamowania. Ruch płytki
przewodzącej w polu indukcji jest źródłem prądów wirowych.
Reinhard Kulessa
38
16.4 Zjawisko indukcji wzajemnej
Rozważmy dwie zwojnice o różnych średnicach i różnej
liczbie zwojów umieszczonych jedna w drugiej.
1’
1
A1
A2
Pierwsza zwojnica posiada N1
zwojów i średnicę A1
Druga zwojnica posiada
N2 zwojów i średnicę A2
l
2
2’
Do zacisków 1 i 1’ łączymy
źródło zasilania dające w zwojnicy prąd o natężeniu I1. Prąd I1
wytwarza w cewce pole indukcji magnetycznej równe B1 równe:
Reinhard Kulessa
39
N1
B1 (t ) 0 I1 (t )
l
Zmiana natężenia prądu I1 – dI1/dt powoduje powstanie w cewce
zmiennego w czasie pola indukcji dB1/dt. To zaś powoduje w
cewce 2 pojawienie się siły elektromotorycznej indukcji V2ind.
ind
2
V
dB
N 2 A1 1
A1 N1 N 2 dI1
0
dt
l
dt
Postępując w sposób analogiczny przyłączając źródło prądu
do cewki 2, otrzymamy na siłę elektromotoryczną indukcji w
cewce 1 wyrażenie:
ind
1
V
N1 A1 dB2
A1 N1 N 2 dI 2
0
dt
l
dt
Reinhard Kulessa
40
Widzimy, że w obydwu wyrażeniach na siłę elektromotoryczną
indukcji występuje wspólny człon zależny jedynie o geometrii
zwojnic i przenikalności magnetycznej ośrodka. Otrzymujemy
bowiem:
dI
ind
V1
ind
2
V
Widzimy, że
L21
L12
2
dI1
dt
(16.7)
dt
A1 N1 N 2
L12 L21 0
.
l
Jednostką indukcji wzajemnej jest 1 Henry = [Wb/A=V·s·A1]
Reinhard Kulessa
41