Projekt „Inżynier mechanik – zawód z przyszłością”
współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zajęcia wyrównawcze z fizyki
-Zestaw 4 -Teoria
Dynamika. Siła, przyspieszenie, zasady dynamiki Newtona. Siła wypadkowa. Przykłady sił: siła
ciężkości, siła tarcia, siła wyporu Archimedesa. Nieinercjalne układy odniesienia, siła bezwładności.
Oddziaływania podstawowe
Według naszej dotychczasowej wiedzy istnieją tylko cztery podstawowe oddziaływania (siły), z
których wynikają wszystkie siły i oddziaływania zaobserwowane we Wszechświecie:
Oddziaływanie grawitacyjne - siła grawitacyjna działa na wszystkie masy (jest siłą powszechną) i
pochodzi od mas; ma długi zasięg i najmniejsze względne natężenie.
Oddziaływanie elektromagnetyczne - siła elektromagnetyczna działa na ładunki i prądy i jej
źródłem są ładunki i prądy; ma długi zasięg. Siły międzyatomowe mają charakter
elektromagnetyczny ponieważ atomy zawierają naładowane elektrony i protony, a oddziaływania
elektromagnetyczne ma wielokrotnie większe natężenie od grawitacyjnego. Większość sił z jakimi
spotykamy się na co dzień np. tarcie, siła sprężystości jest wynikiem oddziaływania atomów, są to
więc siły elektromagnetyczne.
Oddziaływanie jądrowe (silne) - siła utrzymująca w całości jądra atomowe pomimo odpychania
między protonami (ładunki dodatnie), ma bardzo krótki zasięg i największe względne natężenie.
Oddziaływanie słabe - temu oddziaływaniu podlegają wszystkie cząstki elementarne, w
szczególności oddziaływanie to odpowiada za rozpady cząstek elementarnych.
W tabeli poniżej zestawione są cztery oddziaływania podstawowe.
Oddziaływanie
Źródło oddziaływania
Względne natężenie
Zasięg
-38
Długi
-2
Długi
Grawitacyjne
Masa
około 10
Elektromagnetyczne
Ładunek elektryczny
około 10
Jądrowe
min. protony, neutrony
1
Słabe
cząstki elementarne
-15
około 10
Krótki (około 10
-15
m)
Krótki (około 10
-18
m)
Siła F –to miara oddziaływań ciał. Jest to wielkość wektorowa. Jeżeli na ciało działa więcej niż jedna
siła, to siła wypadkowa jest równa sumie działających sił. (Suma w sensie dodawania wektorów)
F F1 F2 F3
Pęd ciała definiujemy jako iloczyn jego masy i prędkości (wektorowej)
p mv
I.
Zasada dynamiki Newtona
Ciało, na które nie działa żadna siła (lub gdy siła wypadkowa jest równa zeru) pozostaje w spoczynku
lub porusza się ze stałą prędkością po linii prostej.
Projekt „Inżynier mechanik – zawód z przyszłością”
współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
II.
Zasada dynamiki Newtona
Jeżeli na ciało o masie m działa siła niezrównoważona siła F lub kilka działających na to ciało sił
posiada niezerową wypadkową F, to zmianie ulega pęd tego ciała. Działająca siła jest wtedy równa
pochodnej pędu względem czasu.
dp
F
dt
Dla ciała o stałej masie sprowadza się to do iloczynu masy i przyspieszenia ciała.
F ma
III.
Zasada dynamiki Newtona
Gdy dwa ciała oddziałują wzajemnie, to siła wywierana przez ciało drugie na ciało pierwsze jest
równa co do wartości i przeciwnie skierowana do siły, jaką ciało pierwsze działa na drugie.
F21 F12
Ciężar
Ciężar definiujemy jako siłę ciężkości działającą na ciało.
Q mg
, gdzie g = 9.81 m/s2 jest to przyspieszenie ziemskie na powierzchni Ziemi.
Powyższy wzór pomija wpływ siły odśrodkowej związanej z ruchem obrotowym Ziemi wokół jej osi
na ciężar ciała.
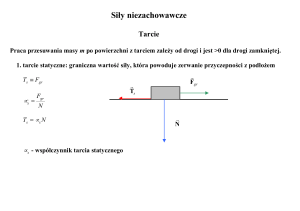
Tarcie
Siła tarcia zawsze działa stycznie do powierzchni zetknięcia ciał i przeciwstawia się względnemu
ruchowi dwóch powierzchni. Tarcie może istnieć wówczas, gdy powierzchnie są nieruchome
względem siebie (tarcie statyczne), jak również wtedy, gdy powierzchnie te poruszają się względem
siebie (tarcie kinetyczne) Maksymalna siła tarcia statycznego Ts jest równa tej krytycznej sile, którą
musieliśmy przyłożyć, żeby ruszyć ciało z miejsca.
Dla suchych powierzchni Ts spełnia dwa prawa empiryczne.
Ts jest w przybliżeniu niezależna od wielkości pola powierzchni styku ciał;
Ts jest proporcjonalna do siły z jaką jedna powierzchnia naciska na drugą.
s
Ts
FN
Gdy działająca siła F jest większa od Ts to ciało zostanie wprawione w ruch, ale nadal będzie istniała
siła tarcia kinetycznego Tk przeciwstawiająca się ruchowi. Siła Tk spełnia dodatkowo, oprócz dwóch
wymienionych powyżej, trzecie empiryczne prawo:
Projekt „Inżynier mechanik – zawód z przyszłością”
współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Tk nie zależy od prędkości względnej poruszania się powierzchni.
k
Tk
FN
Dla większości materiałów µk jest nieco mniejszy od µs.
Siły bezwładności
Siła bezwładności jest to siła działająca na obiekty znajdujące się w nieinercjalnym układzie
odniesienia. Nieinercjalny układ odniesienia to układ poruszający się z przyspieszeniem względem
układu inercjalnego.
Na rysunku XY to inercjalny układ odniesienia,
X’Y’ to nieinercjalny układ odniesienia,
aO to przyspieszenie układu odniesienia nieinercjalnego X’Y’ względem układu inercjalnego XY
ma F mao
druga zasada dynamiki w układzie nieinercjalnym,
gdzie F b mao
jest to siła bezwładności.
W przypadku ruchu po okręgu siła bezwładności odśrodkowa wyraża się wzorem:
F b m
v2
.
R
Siła wyporu Archimedesa
Ciało w całości lub częściowo zanurzone w płynie jest wypierane ku górze siłą równą ciężarowi
wypartego przez to ciało płynu.
Fwyporu m p g p gVZ