1
DWICZENIE 2
PRZENOSZENIE IMPULSÓW PRZEZ CZWÓRNIKI LINIOWE
2.1. Cel dwiczenia
Celem dwiczenia jest poznanie budowy i właściwości czwórników liniowych, a
mianowicie : układu różniczkującego i całkującego.
2.2. Wprowadzenie
Potocznie pod pojęciem impulsu rozumie się sygnał elektryczny szybko pojawiający
się i szybko znikający.
Każdy impuls można opisad podając szereg parametrów, przede wszystkim
czasowych. Wprowadzimy następujące pojęcia :
a) czas narastania czoła impulsu tn - jest to czas, w którym chwilowa wartośd
wielkości elektrycznej tworzącej impuls (t) zmienia się od 0.1 do 0.9
wartości maksymalnej,
b) czas opadania impulsu t0 - czas, w którym chwilowa wartośd wielkości (t)
maleje od 0.9 do 0.1 amplitudy,
c) czas trwania impulsu ti - określony jako przedział czasu, w którym
chwilowa wartośd wielkości elektrycznej (t) jest większa od 0.1 A
(A - amplituda).
W pewnych przypadkach, gdy grzbiet impulsu jest opadający i można wydzielid
wyraźnie kształt grzbietu i spadek impulsu, czas opadania impulsu t0 definiujemy jako czas, w
którym chwilowa wartośd (t) zmaleje od 0.9 do 0.1 AMIN. Podobnie definiujemy czas
narastania korzystając z wartości AMAX. Dla tego typu impulsu można wprowadzid pojęcie
zwisu
Jeżeli ciąg impulsów ma charakter periodyczny, to dla takiego ciągu określamy : okres
powtarzania (repetycja) impulsów T, częstotliwośd powtarzania f = 1/T i współczynnik
wypełnienia impulsu określamy jako
= T1/T.
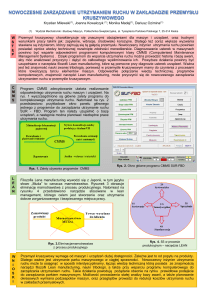
Wszystkie opisane wyżej pojęcia przedstawia Rys.2.1.
2
Rys.2.1. a) ilustracja do definicji czasu narastania, opadania i trwania
impulsu
b) impuls z wyraźnym skosem grzbietu
c) ilustracja okresu powtarzania impulsu
Rozwój teorii układów impulsowych wymagał stworzenia analitycznych opisów
poszczególnych impulsów, a także ich ciągów. Ograniczymy się tu jedynie do przedstawienia
analitycznego dwóch impulsów:
impulsu typu skok jednostkowy i impulsu prostokątnego.
Impuls typu skoku jednostkowego (Rys.5.1) opisuje funkcja Heaviside`a H (t)
Jeżeli skok następuje w chwili t0, to funkcja Heaviside`a wyraża się następującym
wzorem
3
Rys.2.2. Skok jednostkowy : a) dla t = 0, b) dla t = t0
Funkcja prostokątna o jednostkowej szerokości i jednostkowej wysokości, o środku w
punkcie 0, jest określona następująco (Rys.2.3)
Rys.2.3. Impuls prostokątny : a) o jednostkowej podstawie, jednostkowej
wysokości i środku w początku układu, b) o jednostkowej
amplitudzie, szerokości t1 i przesunięty względem początku układu o t0
Jeżeli funkcja prostokątna ma szerokośd t1 i jest przesunięta o odcinek t0
względem funkcji (t), to zapisujemy ją następująco :
Łatwo więc można zauważyd, że funkcję prostokątną można przedstawid jako różnicę
dwóch funkcji Heaviside`a przesuniętych względem siebie o szerokośd funkcji prostokątnej.
Technika kształtowania impulsów zajmuje się stroną fizyczną i matematyczną zjawisk
polegających na istnieniu różnicy między przebiegami impulsowymi w obwodzie a
działającymi na obwód, wyjaśniając te zjawiska ilościowo i jakościowo. Układy i operacje
4
kształtowania impulsów w układach i obwodach elektrycznych spotykane w praktyce są
złożone. Dla rozwiązania ich należy je sprowadzid do układów i operacji prostych.
Rozróżniamy kształtowanie liniowe, tj. kształtowanie przez obwód liniowy i
kształtowanie nieliniowe, np. przez lampę bądź tranzystor jako element nieliniowy.
W niniejszym dwiczeniu rozpatrzone zostaną proste obwody liniowe
(czwórniki liniowe) złożone z elementów R i C, do których zaliczają się obwody różniczkujące
i całkujące.
Podstawową cechą, która opisuje właściwości czwórnika (Rys.2.4) jest jego
transmitancja operatorowa K (s).
gdzie U1 (s), U2 (s ) są transformatami Laplace`a napięd - wejściowego U1(t)
i wyjściowego U2(t).
W ogólnym przypadku możemy mówid o sygnale wejściowym lub wyjściowym mając
na myśli prąd lub napięcie. Sygnał wejściowy często nosi nazwę wymuszenia, a sygnał
wyjściowy - odpowiedzi czwórnika na określone wymuszenie.
Podstawowym pojęciem w technice impulsowej jest pojęcie tzw. stałej czasowej
przebiegu wykładniczego. Stała czasowa określa czas liczony od pewnej chwili początkowej
do chwili osiągnięcia przez przebieg poziomu różniącego się e-krotnie (e = 2.718) od poziomu
początkowego.
Rys.2.4. Czwórnik o transmitancji K(s)
Układ różniczkujący
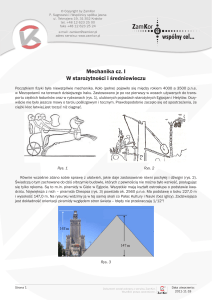
Przedstawiono na Rys.2.5 czwórnik RC nazywany jest układem różniczkującym. Może
on służyd do sprzęgania ze sobą układów, gdyż separuje składową stałą.
5
Rys.2.5. Schemat układu różniczkującego (układ różniczkuje gdy
U2<<U1)
Na wyjściu takiego układu uzyskuje się napięcie, którego kształt jest zbliżony do
kształtu pochodnej napięcia doprowadzonego. Wynika stąd, że prąd płynący przez
kondensator
Jeżeli teraz szeregowo z kondensatorem włączony zostanie rezystor R o małej
rezystancji tak, aby U1 Uc, to napięcie wyjściowe pobrane z tego rezystora będzie równe
Układem różniczkowym nazywa się więc filtr górnoprzepustowy, dający na wyjściu
sygnał o kształcie zbliżonym do kształtu przebiegu idealnego uzyskanego w wyniku
matematycznego różniczkowania sygnału doprowadzonego do wejścia układu.
Należy jednak podkreślid, że o ile w przypadku matematycznego różniczkowania
przebiegów o idealnie stromych zboczach uzyskuje się pochodną nieskooczenie wielką, o tyle
w praktyce przypadek taki występowad nie może i uzyskany przebieg różni się od idealnego
zarówno amplitudą, jak i czasami trwania oraz narastania.
Transmitancja układu z Rys.5.5 wyraża się następująco
Najpierw znajdziemy odpowiedź układu na wymuszenie o charakterze skokowym
U1H(t). Transformata napięcia wejściowego jest następująca
stąd:
6
gdzie = RC - jest stałą czasową układu.
Znając transformatę odwrotną otrzymamy
Rys.2.6. Przebiegi czasowe napięd w układzie różniczkującym przy
wymuszeniu skokowym
Odpowiedź czwórnika u2( t ) / U1 jest funkcją wykładniczą exp
Z równania 5.5 możemy odczytad sens stałej czasowej
Po upływie czasu t = napięcie wyjściowe maleje e-krotnie w stosunku do amplitudy
wymuszenia. Ponieważ funkcja
więc teoretycznie mamy w układzie doczynienia zawsze z przebiegiem nieustalonym.
Zachodzi zatem koniecznośd umownego ustalenia czasu, po którym przebieg (6) uważa się za
ustalony. Umownie przyjmuje się 5 , gdyż wtedy napięcie u2 maleje do wartości mniejszej
od 1% amplitudy.
Znajdziemy teraz odpowiedź układu na pojedynczy impuls prostokątny o czasie
trwania ti
7
Ponieważ
więc transformata Laplace`a napięcia u1(t) ma postad
stąd
Znajdując transformatę odwrotną otrzymujemy
Wykreślne przedstawienie odpowiedzi u2(t) pokazano na Rys.2.7.
Jeżeli czas t1 jest znacznie większy od stałej czasowej , to odpowiedź układu ma taki, jak to
przedstawiono na Rys.2.7c. I odwrotnie, gdy t1 << to odpowiedź układu jest taka jak na
Rys.2.7b.
Omawiany układ różniczkowy może byd wykorzystany do otrzymywania krótkich
impulsów, jeżeli jego stała czasowa jest dostatecznie mała. Układ pracuje w zadawalający
sposób, dając na wyjściu impulsy o wymaganej małej szerokości, amplitudzie zbliżonej
wartością do amplitudy impulsu różniczkowego i stromym czole, jeżeli impulsy wejściowe
posiadają również ostre czoło.
8
Rys.2.7. Przebiegi czasowe napięd w układzie różniczkowym dla
prostokątnego impulsu napięcia wejściowego (a), odpowiedź dla
>>ti (b), odpowiedź dla <<ti (c)
Układ całkujący
Czwórnik, którego schemat przedstawiono na Rys.5.8 stanowi filtr dolnoprzepustowy.
W technice impulsowej nosi on nazwę układu całkującego. Układ całkuje, gdy spełniony jest
warunek u2<<u1
Transmitancja układu wyraża się wzorem
gdzie = RC - stała czasowa układu
Rys.2.8. Schemat układu całkującego
Odpowiedź układu na skokowe wymuszenie U1(s) = U1/s jest następująca
9
Czas narastania impulsu tn wyznaczyd można z równania
W wyniku obliczenia otrzymujemy
Rys.2.9. Przebiegi czasowe napięd w układzie całkującym przy wymuszeniu
skokowym
Przeanalizujmy teraz odpowiedź układu na wymuszenie typu pojedynczego impulsu
prostokątnego. Transformata odpowiedzi wynosi
Wyznaczając transformatę odwrotną otrzymujemy
W zapisie konwencjonalnym napięcie uzyskane na wyjściu układu całkującego wyraża się
jako
Gdy C jest dostatecznie duże, tak że U1 UR, wówczas
10
Uproszczenie to oznacza, że źródło napięcia wejściowego wraz z rezystancją R
traktuje się w danym układzie jako generator prądu, dla którego wartośd i jest
proporcjonalna do napięcia wejściowego oraz nie zależy od obciążenia U2 na zaciskach
wyjściowych generatora.
Wtedy
Przebieg prostokątny po scałkowaniu przedstawia się jako suma algebraiczna
przebiegów wykładniczych, odpowiadających kolejnym odcinkom scałkowanych
jednostkowych skoków dodatnich i ujemnych.
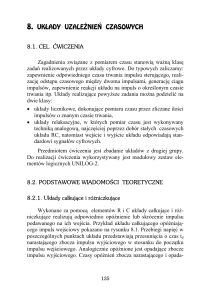
Wpływ stałej czasowej na kształt napięcia scałkowanego przedstawia Rys.2.10.
Całkowanie staje się tym silniejsze, im stała czasowa staje się większa.
Rys.2.10. Wpływ stałej czasowej na kształt scałkowanego przebiegu
prostokątnego
a) ti < , b) ti = , c) ti > ,
2.3. Badania
Badanie czwórników liniowych polega na obserwacji ich odpowiedzi na wymuszenie
prostokątne oraz pomiarze takich parametrów jak : amplitudy, zwisu, czasu trwania
impulsów, czasu narastania i opadania impulsów oraz częstotliwości powtarzania (repetycji).
Parametry te mierzy się w funkcji stałej czasowej badanych czwórnikówRC.