MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH
Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie
ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych, przyjętych jako sygnały
wyjściowe (), od wielkości fizycznych, będących sygnałami wejściowymi () danego członu lub układu.
Równanie różniczkowo-całkowe
1
+ + = ௧
L
R
przywarunkachpoczątkowych:0 = 0, 0 = 0
i
e
C Sygnałem wyjściowym układu jest prąd w obwodzie, a sygnałem
vc
i
wejściowym () jest wartość napięcia źródła napięciowego ().
Różniczkując obie strony równania różniczkowo-całkowego otrzymujemy
równanie różniczkowe drugiego rzędu
ଶ 1
+
+
=
ଶ
Ponieważ = oraz = , równanie powyższe można zapisać w postaci
ଶ ଶ
+ ଵ
+ = ଵ
ଶ
1
1
przyczym:ଶ = 1, ଶ = ,ଶ =
, ଵ = sąwspółczynnikamirównaniaróżniczkowego.
1
Analogi elektryczne układów mechanicznych
Zmienne przepływu: siła ݂( )ݐjest analogiczna do prądu ݅()ݐ
Zmienna spadku:
prędkość )ݐ(ݒjest analogiczna do napięcia )ݐ(ݑ
Tłumik
Rezystor
f (t ) = bv(t )
f (t )
i (t ) =
1
u(t )
R
i (t )
Tlumik
1
R
b
f (t )
u(t )
Rezystor
v(t )
x&(t ) = v(t )
i(t )
u (t )
2
Sprężyna
Cewka indukcyjna
f (t ) = kx(t ) = k ∫ v(t )dt
f (t )
i(t ) =
i (t )
Sprezyna
k
1
u(t )dt
∫
L
1
L
u(t )
Cewka
v(t )
f (t )
i(t )
x(t ) = ∫ v(t )dt
Masa
f (t )
∫ u(t )dt
Kondensator
dv(t )
f (t ) = m
dt
i(t ) = C
i (t )
f (t )
m
m
u(t )
Kondensator
C
Masa
i(t )
v(t )
&x&(t ) =
du(t )
dt
dv(t )
dt
du (t )
dt
3
ଶ ()
()
+
+ = ()
ଶ
Amortyzator
Resor
m
przy czym:
b – stała tłumienia amortyzatora - tłumika tłokowego,
k – stała sprężystości sprężyny – resora,
m – masa zawieszenia,
- położenie chwilowe masy,
() - siła oddziaływania na zawieszenie
Masa
F
)ݐ(ݕ
Przyjmując, że = , = () oraz
1
ଵ = ,
= ,
ଵ = ,
ݑሺݐሻ = ܨ
równanie dynamiki układu sprowadzamy do postaci
ଶ ()
()
+
+ = ()
ଵ
ଶ
t
4
Transmitancja operatorowa
Załóżmy, że mamy proces (obiekt) gdzie zależność pomiędzy wielkością wyjściową jest y(t)
i wejściową u(t) jest określona równaniem różniczkowym:
݀ ݕሺ ݐሻ
݀ିଵ ݕሺݐሻ
݀ݕሺݐሻ
ܽ
+ ܽିଵ
+ ⋯ + ܽଵ
+ ܽ ݕሺ ݐሻ
݀ ݐ
݀ ݐିଵ
݀ݐ
݀ ݑሺ ݐሻ
݀ିଵ ݑሺݐሻ
݀ݑሺݐሻ
= ܾ
+
ܾ
+
⋯
+
ܾ
+ ܾ ݑሺݐሻ
ିଵ
ଵ
݀ ݐ
݀ ݐିଵ
݀ݐ
gdzie współczynniki ai i bj są wielkościami stałymi przy czym m ≤ n.
Jeżeli wszystkie warunki początkowe są zerowe, wtedy, wykorzystując transformację Laplace'a, związek
ten można zapisać w postaci równania operatorowego
ሺܽ ݏ + ܽିଵ ݏିଵ + ⋯ + ܽଵ ݏ+ ܽ ሻܻሺݏሻ = ሺܾ ݏ + ܾିଵ ݏିଵ + ⋯ + ܾଵ ݏ+ ܾ ሻܷሺݏሻ
lub w postaci transmitancji operatorowej
ℒ ሼ)ݐ(ݕሽ ܻሺݏሻ ܾ ݏ + ܾିଵ ݏିଵ + ⋯ + ܾଵ ݏ+ ܾ
=
=
ܩሺ ݏሻ =
ℒ ሼ)ݐ(ݑሽ ܷሺݏሻ
ܽ ݏ + ܽିଵ ݏିଵ + ⋯ + ܽଵ ݏ+ ܽ
Transmitancja operatorowa ܩሺݏሻ układu (obiektu) liniowego, określa stosunek transformaty Laplace'a
wielkości wyjściowej ܻሺݏሻ do transformaty Laplace'a wielkości wejściowej U(s), przy założeniu zerowych
warunków początkowych.
5
Transmitancja operatorowa ܩሺݏሻ jest funkcją wymierną zmiennej zespolonej s i ma tę właściwość, że
w rezultacie pomnożenia transformaty sygnału wejściowego ܷ( )ݏprzez transmitancję ܩሺݏሻ otrzymuje się
transformatę sygnału wyjściowego ܻሺݏሻ - odpowiedzi układu
ܻሺsሻ = ܩሺݏሻܷ()ݏ
Znając postać transmitancji operatorowej układu można obliczyć przebieg odpowiedzi ݕሺݐሻ układu na
dowolne wymuszenie )ݐ(ݑprzy wykorzystaniu odwrotnego przekształcenia Laplace’a
ݕሺݐሻ = ℒ ିଵ ሼܻሺsሻሽ = ℒ ିଵ ሼ ܩሺݏሻܷ()ݏሽ
Postać równania dynamiki lub postać transmitancji operatorowej stanowią kryterium, według którego
klasyfikuje się człony automatyki.
Członem dynamicznym nazywany jest dowolny układ fizyczny, w którym
ݕ
ݑ
)ݏ(ܩ
wyodrębniona jest wielkość wejściowa (sygnał wejściowy) i wielkość
wyjściowa (sygnał wyjściowy), a właściwości jego dynamiki syntetycznie
określa transmitancja operatorowa.
Umowne oznaczenie bloku
(członu) automatyki
Rząd członu lub układu automatyki jest określony wysokością rzędu
równania różniczkowego. Rząd członu lub układu określa więc także
najwyższa wartość wykładnika potęgowego przy operatorze s mianownika transmitancji operatorowej.
Współczynniki ܽ mianownika transmitancji determinują rozkład jego pierwiastków (biegunów) w
płaszczyźnie zmiennej zespolonej ݏ, który decyduje o charakterze przebiegu przejściowego – dynamiki
układu. Graficzna prezentacja przebiegu przejściowego przy zerowych warunkach początkowych
nazywana jest charakterystyką czasową.
6
Opis układów dynamicznych w przestrzeni stanów
Stanem układu (procesu) nazywamy zbiór liniowo niezależnych wielkości ଵ , ଶ , … określających
w pełni skutki przeszłych oddziaływań (t < t0) na układ, który jest wystarczający do wyznaczenia
przebiegów chwilowych dowolnych wielkości w tym układzie dla t > t0, gdy znane są wymuszenia
i parametry tego obwodu. Wielkości ଵ , ଶ , … nazywamy zmiennymi stanu, a wektor x = ଵ , ଶ , … ்
wektorem stanu tego układu.
Można powiedzieć, że układ dynamiczny ma swoistą "pamięć", w której przechowuje informacje
o wpływie poprzednich wielkości wejściowych.
= + = () + gdzie:
równanie stanu
równanie wyjść
− × wymiarowamacierzstanu − × wymiarowamacierzstanu
− × wymiarowamacierzwyjść − × wymiarowamacierzprzejścia
D
u
B
x&
∫
x
C
y
A
7
L
1
1
+ + = lub
+ + = R
i
C
vc
e
i
1
= lub
= Układ równań pierwszego rzędu zapisujemy w postaci pojedynczego
równania macierzowo-wektorowego – równania stanu
1
1
−
−
= () + =
+ lub
1
0
0
gdzie: = ଵ = - zmienne stanu, = - wejście układu (sterowanie),
ଶ ଵଵ
= ଶଵ
ଵଶ
ଵ
macierz
stanu,
=
- macierz reprezentująca wejście (macierz sterowań)
ଶଶ
ଶ
Sygnały wyjściowe zależne są od zmiennych stanu oraz sygnału wejściowego, co zapisuje się równaniem
wyjść:
= () + .
W przykładzie wyjściem jest prąd. Stąd równanie wyjścia ma postać: = ଵ = 1 0 ଵ .
ଶ Można także wyznaczyć dodatkową wielkość jaką jest napięcie
= ଶ = 0
1 ଵ .
ଶ 8
= + L
= () + e2
C1
R3
C2
U3
R1
భ ()
= మ (),
()
= ଵ , = ଷ ()
ଶ e1
R2
0
= 0
− 1
= 0
1
0
ଵ
1
ଷ
0
−
,
=
ଶ ଶ + ଷ ଶ ଶ + ଷ 1
ଶ ଵ + ଷ + ଵ ଷ ଷ
−
ଶ + ଷ ଶ + ଷ ଷ
ଶ + ଷ
0
ଶ ଷ
, = 0
ଶ + ଷ
0
1
ଶ ଶ + ଷ ଷ
ଶ + ଷ −
ଷ
ଶ + ଷ
9
Zmienne stanu a transmitancja operatorowa
ℒ
= + → () = () + ℒ
= + → = () + Wyznaczanie wektora transformat
operatorach zmiennych stanu:
− () = = − ିଵ =
− ୟୢ୨ det − Wyznacznik det − macierzy charakterystycznej − jest wielomianem stopnia n.
Elementy macierzy dołączonej − ୟୢ୨ są wielomianami stopnia co najwyżej − 1.
Wyznaczanie wektora transformat operatorach
wyjść – odpowiedzi układu:
Transmitancja operatorowa dla układu
jednowymiarowego
=
=
− ୟୢ୨ + ()
det − () − ୟୢ୨ =
+
()
det − Jeżeli stopień wielomianu licznika jest niższy od stopnia wielomianu mianownika transmitancji
operatorowej (), to macierz = 0.
10
Reprezentacja transmitancji operatorowej przez zmienne stanu
Transmitancja operatorowa układu
ܻሺݏሻ ܾ ݏ + ܾିଵ ݏିଵ + ⋯ + ܾଵ ݏ+ ܾ
ܩሺ ݏሻ =
=
ܷ ሺ ݏሻ
ݏ + ܽିଵ ݏିଵ + ⋯ + ܽଵ ݏ+ ܽ
Mnożąc licznik i mianownik przez ି ݏ transmitancję można zapisać w postaci
ܾ ݏି + ܾିଵ ݏିଵି + ⋯ + ܾଵ ݏଵି + ܾ ି ݏ
ܩሺ ݏሻ =
1 + ܽିଵ ି ݏଵ + ⋯ + ܽଵଵି ݏ+ ܽ ି ݏ
Przyjmując, że
ܧሺ ݏሻ =
1
ܷሺݏሻ,
1 + ܽିଵ ି ݏଵ + ⋯ + ܽଵଵି ݏ+ ܽ ି ݏ
lub
ܧሺݏሻ = ܷሺݏሻ − ሺܽିଵ ି ݏଵ + ⋯ + ܽଵଵି ݏ+ ܽ ି ݏ ሻܧሺݏሻ,
to
ܻ( = )ݏሺܾ ݏି + ܾିଵ ݏିଵି + ⋯ + ܾଵ ݏଵି + ܾ ି ݏ ሻ ܧሺݏሻ
11
Przyjmując za zmienne stanu ݔଵ , ݔଶ , … ݔ wielkości wyjściowe integratorów można napisać układ równań
ݔሶ ଵ = ݔଶ
ݔሶ ଶ = ݔଷ
⋮
ݔሶ ିଵ = ݔ
ݔሶ = −ܽ ݔଵ − ܽଵ ݔଶ − ⋯ − ܽିଶ ݔିଵ − ܽିଵ ݔ + ݑ
ܾ = ݕ ݔଵ + ܾଵ ݔଶ + ⋯ + ܾିଵ ݔିଵ + ܾ ݔ
bn-1
s-1E(s)
U(s)
u
E(s)
∫
Y(s)
y
bn-2
s-2E(s)
xn
∫
s1-nE(s)
xn-1
x2
s-nE(s)
∫
x1
b0
-an-1
-an-2
-a0
12
Postać kanoniczna (normalna)
sterowalna
= + = 0
0
=
⋮
0
−
1
0
⋮
0
−ଵ
0
1
⋮
0
−ଶ
ଶ
⋯
⋯
⋱
⋯
⋯
0
0
0
0
⋮ , = ⋮ 1 0
1
−ିଵ =
ଵ
0
1
′ = ⋮
0
0
0
0
⋮
0
0
⋯
⋯
⋮
⋯
⋯
0
0
⋱
0
1
−
−ଵ
ଵ
⋮ ,′ = ⋮ −ିଶ ିଵ −ିଵ ′ = 0
0
⋯
0
1 ⋯
Postać kanoniczna (normalna)
obserwowalna
= ′ + ′
= ′
Miedzy macierzami obu typów wariantów modeli opisanych w przestrzeni stanów zachodzą zależności
ᇱ = ࢀ ,
ᇱ = ࢀ ,ᇱ = ࢀ 13
Podstawowe typy sygnałów i ich transformaty Laplace’a
݂ሺݐሻ
݂ሺݐሻ
݂ሺݐሻ = ߜܣሺݐሻ
ܣ
݂ሺݐሻ = ߜܣሺ ݐ− ߬ሻ
ܣ
ܨሺݏሻ = ℒ ሼ݂ ሺݐሻሽ = ି ݁ܣఛ௦
ܨሺݏሻ = ℒ ሼ݂ሺݐሻሽ = ܣ
߬
t
݂ሺݐሻ
ܣ
݂ሺݐሻ
݂ሺݐሻ = ܣሺݐሻ
ܨሺݏሻ = ℒ ሼ݂ሺݐሻሽ =
t
݂ሺݐሻ = ܣሺ ݐ− ߬ሻ
ܣ
ܣ
ݏ
ܨሺݏሻ = ℒ ሼ݂ ሺݐሻሽ =
߬
t
݂ሺݐሻ
t
݂ሺݐሻ
݂ሺݐሻ = ݐܣሺݐሻ
ݐܣ
݂ሺݐሻ = ݐܣሺ ݐ− ߬ሻ
ݐܣ
ܨሺݏሻ = ℒ ሼ݂ሺݐሻሽ =
ݐ
ܣ
ݏଶ
t
ܨሺݏሻ = ℒ ሼ݂ ሺݐሻሽ =
߬
݂ሺݐሻ
ି ܣఛ௦
݁
ݏ
ݐ + ߬
ି ܣఛ௦
݁
ݏଶ
t
݂ሺݐሻ = ݐܣଶ ሺݐሻ
ݐܣ ଶ
ܨሺݏሻ = ℒ ሼ݂ ሺݐሻሽ =
ݐ
t
ܣ
ݏଷ
14
݂ሺݐሻ
݂ ሺ ݐሻ = ݁
ܨሺ ݏሻ =
ݐ
ିఙ௧
݂ሺݐሻ
1
ݏ+ߪ
ܨሺ ݏሻ =
ݐ
t
݂ሺݐሻ
݂ሺݐሻ = sin ߱ݐ
t
݂ሺݐሻ
ܨሺ ݏሻ =
ܨሺ ݏሻ =
߱
ሺ ݏ+ ߪ ሻଶ + ߱ ଶ
1
ሺ ݏ+ ߪ ሻଶ
t
݂ሺݐሻ
߱
ݏଶ + ߱ଶ
݂ሺݐሻ = ݁ ିఙ௧ sin ߱ݐ
t
݂ሺݐሻ = ି ݁ݐఙ௧
݂ሺݐሻ = cos ߱ݐ
t
݂ሺݐሻ
ܨሺ ݏሻ =
ݏ
ݏଶ + ߱ଶ
݂ሺݐሻ = ݁ ିఙ௧ cos ߱ݐ
t
ܨሺݏሻ =
ݏ+ߪ
ሺ ݏ+ ߪ ሻଶ + ߱ ଶ
15
Wyznaczanie oryginału funkcji wymiernej zmiennej zespolonej Odwrotne przekształcenie Laplace’a przyporządkowuje funkcji zmiennej zespolonej s funkcję ()
zmiennej rzeczywistej t.
= ℒ ିଵ Funkcję wymierną
+ ିଵ ିଵ + ⋯ + ଵ +
=
=
+ ିଵ ିଵ + ⋯ + ଵ +
można zawsze przedstawić w postaci sumy ułamków prostych o postaci
= ୀଵ ୀଵ
,
−
przy czym: jest dowolnym pierwiastkiem wielomianu M(), l – jego krotnością,
, - liczbą rzeczywistą, zwaną współczynnikiem udziału, j - liczbą różnych co do wartości pierwiastków.
16
Każdemu z prostych ułamków składowych odpowiada znana funkcja zmiennej rzeczywistej - czasu. I tak:
Gdy = ݏ0, wówczas przekształcenie odwrotne Laplace’a daje
ℒ
ܿ
ܿ ݐ
ቄ ቅ =
ሺ݈ − 1ሻ!
ݏ
Gdy = ݏσ jest liczbą rzeczywistą, wówczas
ℒ
ܿ
ܿ ݐ
൜
ൠ=
݁
ሺ݈ − 1ሻ!
ሺ ݏ− ߪ ሻ
Gdy ߪ = ݏ± ݆߱ jest liczbą zespoloną lub urojoną, to pierwiastki zespolone występują zawsze jako parami
sprzężone. Sumę takich ułamków prostych można przedstawić jako wyrażenie o wszystkich
współczynnikach rzeczywistych
ℒ ൜
ܿ ݏ+ ܿ
ܿ + ܿ ߪ
ൠ
=
൬ܿ
cos
߱ݐ
+
sin ߱ݐ൰ ݁ ሺ ݏ− ߪ ሻ + ߱
߱
17
Przy obliczaniu współczynników udziału możliwe są dwa postępowania.
Pierwsze z nich zwie się metodą współczynników nieoznaczonych. Polega ona na sprowadzeniu sumy
ułamków prostych z nieokreślonymi jeszcze współczynnikami ଵ , ଶ , ଷ , … do wspólnego mianownika, a
następnie przyrównaniu wielomianu otrzymanego w liczniku tego ułamka do wielomianu licznika funkcji
wymiernej (). Oba liczniki są sobie tożsamościowo równe, więc równe są również współczynniki przy
wyrazach o takiej samej potędze zmiennej s. Prowadzi to do zbioru równań liniowych względem
współczynników , który można rozwiązać znanymi sposobami.
Drugie postępowanie oparte jest na twierdzeniu Heaviside’a o rozkładzie. I tak w przypadku
jednokrotnych pierwiastków wielomianu funkcji wymiernej () wartości współczynników udziału
wyznacza się ze wzoru
= − ()|௦ୀ௦
W przypadku pierwiastka l–krotnego w () występuje między innymi suma ułamków prostych o
postaci
ଵ
ଶ
+
+
⋯
+
− − ଶ
−
18
Wartości l współczynników oblicza się korzystając ze wzorów
, = − ()
− ()
1 − ()
, =
2!
⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯
1 − ()
, =
! , =
Wyznaczanie wartości współczynników udziału w przypadku pierwiastków zespolonych można
wyznaczyć na podstawie poniższej tożsamości
+ − − =
,
− + − + gdzie wartości współczynników i są składowymi: rzeczywistą i urojoną, liczby zespolonej ,
zdefiniowanej wzorem
− + = + =
19
Transformata odwrotna tego składnika ma postać
ℒ − − cos − sin .
=
− + Prawą stronę powyższej zależności można zapisać w postaci
przy czym = arctg − .
cos − sin = || sin
+ ,
20
Zadanie 1
Wyznacz transformatę odwrotną funkcji operatorowej
=
7 + 10
+ 1 + 2,5
Rozwiązanie
Pierwiastkami - miejscami zerowymi - mianownika są: ଵ = 0, ଶ = −1, ଷ = −2,5. Pierwiastki są jak
widać jednokrotne. Rozkład na ułamki proste będzie więc typu
ଵ
ଶ
ଷ
= +
+
+ 1 + 2,5
Współczynniki udziału = 1,2,3 wyznaczamy zgodnie z zależnością
= − ()|௦ୀ௦
ଵ = ()|௦ୀ = 7 + 10
= 4,
+ 1 + 2,5 ௦ୀ
7 + 10
|
ଶ = + 1 () ௦ୀିଵ =
= −2,
+ 2,5 ௦ୀିଵ
7 + 10
|
ଷ = + 2,5 () ௦ୀିଶ,ହ =
= −2
+ 1 ௦ୀିଶ,ହ
21
W rezultacie otrzymujemy rozkład na ułamki proste
4
−2
−2
= +
+
+ 1 + 2,5
Zgodnie z
ିଵ
ିଵ
ℒ ିଵ =
,ℒ ିଵ =
ఙ௧
− 1!
− − 1!
transformata odwrotna () funkcji jest sumą transformat odwrotnych rozkładu na ułamki proste
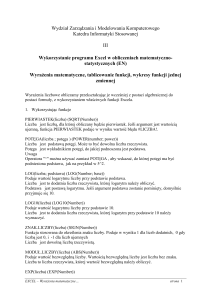
= ଵ + ଶ ௦భ௧ + ଷ ௦మ௧ = 4 − 2 ି௧ − 2 ିଶ,ହ௧
Przebiegi funkcji i jej składowych względem zmiennej rzeczywistej t pokazuje rys. 1.
݂ሺݐሻ
݂ଵ ()ݐ
4
݂ ሺݐሻ = ݂ଵ ሺݐሻ + ݂ଶ ሺݐሻ + ݂ଷ ሺݐሻ
3
݂ଵ ( = )ݐ4
2
݂ଶ ሺݐሻ = −2݁ ି௧
1
݂ଷ ሺݐሻ = −2݁ ିଶ,ହ௧
0.5
-1
-2
1
1.
݂ଶ ()ݐ
2
2.5
3
t
݂ଷ ()ݐ
Rys. 1. Wykres funkcji ݂( )ݐw zadaniu 1
22
Zadanie 2
Wyznacz współczynniki udziału ܿ୧ z zadania 1.metodą współczynników nieoznaczonych.
Rozwiązanie
Prawą stronę poniższego równania
7 ݏ+ 10
ܿଵ
ܿଶ
ܿଷ
= +
+
ݏሺ ݏ+ 1ሻሺ ݏ+ 2,5ሻ
ݏ ݏ+ 1 ݏ+ 2,5
sprowadzamy do wspólnego mianownika
7 ݏ+ 10
ܿଵ ሺ ݏ+ 1ሻሺ ݏ+ 2,5ሻ + ܿଶ ݏሺ ݏ+ 2,5ሻ + ܿଷ ݏሺ ݏ+ 1ሻ
=
ݏሺ ݏ+ 1ሻሺ ݏ+ 2,5ሻ
ݏሺ ݏ+ 1ሻሺ ݏ+ 2,5ሻ
Mamy tu różne postacie tego samego wyrażenia, ale liczniki obu ułamków są sobie równoważne.
7 ݏ+ 10 = ܿଵ ሺ ݏ+ 1ሻሺ ݏ+ 2,5ሻ + ܿଶ ݏሺ ݏ+ 2,5ሻ + ܿଷ ݏሺ ݏ+ 1ሻ
Rozkład na ułamki proste jest prawdziwy dla każdej wartości s. Zatem podstawiając takie wartości s,
które wyzerują odpowiednie składniki licznika prawej strony powyższej tożsamości, uzyskamy wartości
poszczególnych współczynników.
23
I tak, podstawiając
= 0otrzymujemy10 = ଵ 2,5stądଵ = 4,
= −1otrzymujemy3 = −ଶ 1,5stądଶ = −2,
= −2,5otrzymujemy − 7,5 = ଷ 3,75stądଷ = −2.
24
Zadanie 3
Wyznacz transformatę odwrotną – oryginał - funkcji operatorowej
ଶ + 2 + 5
=
+ 3 + 5ଶ
Rozwiązanie
Pierwiastki mianownika są równe ଵ = −3, ଶ = −5, przy czym pierwszy z nich jest jednokrotny, drugi
dwukrotny. Rozkład na ułamki proste będzie więc typu
ଵ
ଶଵ
ଶଶ
+
+
+ 3 + 5 + 5ଶ
=
Współczynnik ଵ wyznaczamy zgodnie z zależnością = − ()|௦ୀ௦
Pozostałe dwa zgodnie z zależnością
ଶ
ଵ
+
+
⋯
+
.
− − ଶ
−
Gdzie współczynniki udziału wyznaczamy zgodnie z procedurą
, = − ()௦ୀ௦
,ିଵ = − ()
ௗ
ௗ௦
=
ଵ
ௗమ
− ()
௦ୀ௦
௦ୀ௦ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯
ଵ ௗ
− ()
,ଵ =
! ௗ௦
௦ୀ௦ ,ିଶ
ଶ! ௗ௦ మ
przy czym tutaj = 2, = 2.
25
W tym przypadku
ଶ + 2 + 5
ଵ = + 3() =
+ 5ଶ
ଶଶ
ଶଵ
= 2,
௦ୀିଷ
ଶ + 2 + 5
= + 5 () =
= −10,
+3
௦ୀିହ
ଶ
ଶ + 2 + 5
ଶ + 6 + 1
ଶ
+ 5 ()
=
=
=
= −1.
+ 3ଶ
+3
௦ୀିହ
௦ୀିହ
Stąd otrzymujemy rozkład na ułamki proste z ujawnionymi wartościami współczynników udziału
2
−1
−10
=
+
+
+ 3 + 5 + 5ଶ
Oryginały poszczególnych ułamków uwidacznia związek
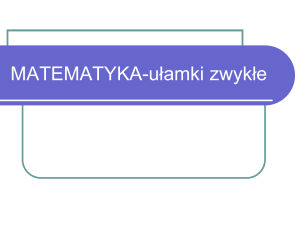
() = ଵ ௦భ௧ + ଶଵ ௦మ௧ + ଶଶ ௦మ௧ = 2 ିଷ௧ − 1 + 10 ିହ௧
Przebiegi funkcji i jej składowych względem zmiennej rzeczywistej t pokazuje rys. 2.
26
݂ଵ ( = )ݐ2݁ ିଷ௧
݂ሺݐሻ
2
݂ଶ ሺݐሻ = −1݁ ିହ௧
1.5
݂ ሺݐሻ = ݂ଵ ሺݐሻ + ݂ଶ ሺݐሻ + ݂ଷ ሺݐሻ
݂ଷ ሺݐሻ = −10ି ݁ݐହ௧
1
݂ଵ ()ݐ
0.5
0
0.5
-0.5
-1
1
1.5
2 t
݂ଷ ()ݐ
݂ଶ ()ݐ
Rys. 2. Wykres funkcji ݂( )ݐw zadaniu 3
Warto zauważyć, że wartość współczynnika ܿଶଵ można wyznaczyć bez różniczkowania. Ponieważ
rozkład na ułamki proste jest prawdziwy dla każdego s, to jest także prawdziwy dla = ݏ0. Podstawiając
więc = ݏ0 otrzymuje się
ଶ
ݏ
+ 2 ݏ+ 5
ܿଵ ቚ
ܿଶଵ ቚ
ܿଶଶ ฬ
=
+
+
ቤ
ሺ ݏ+ 3ሻሺ ݏ+ 5ሻଶ
ݏ+ 3 ௦ୀ ݏ+ 5 ௦ୀ ሺ ݏ+ 5ሻଶ ௦ୀ
௦ୀ
1
ܿଵ ܿଶଵ ܿଶଶ
= +
+
5
25
15 3
Ponieważ ܿଵ = 2 i ܿଶଶ = −10, to stąd wynika, że ܿଶଵ = −1.
27
Zadanie 4
Wyznacz oryginał funkcji operatorowej
=
5 + 13
+ 4 + 13
Rozwiązanie
Mianownik ma trzy pierwiastki, z których jeden jest liczbą rzeczywistą = 0 a pozostałe dwa są
liczbami zespolonymi sprzężonymi, co zapiszemy w formie następującej , = −2 ± 3
W związku z
ℒ + + =
cos
+
sin − + rozkład na ułamki proste będzie typu
=
+ +
+ 2 + 3
Z powodu operowania liczbami zespolonymi, dogodniejsze jest posłużenie się rozkładem wynikającym
z tożsamości
+ − − =
,
− + − + gdzie wartości współczynników i są składowymi: rzeczywistą i urojoną, liczby zespolonej zdefiniowanej wzorem
− + =
= +
28
Transformata odwrotna tego składnika ma postać
ℒ − − = cos − sin − + W związku z powyższym zapis rozkładu funkcji () przedstawiamy w postaci
() =
Współczynnik wyniesie
+ 2 − 3
+
+ 2 + 3
5 + 13
= ()|
= = 1.
+ 4 + 13 Pozostałe dwa współczynniki i wyznaczamy zgodnie z procedurą pokazaną powyżej
5 + 13
+ 4 + 13
=
= −1 − .
=
3
3
Wartości tych współczynników wynoszą zatem: = −1, = −1.
29
Rozkład na ułamki proste zapisujemy w postaci
= )ݏ(ܨ
1 −ሺ ݏ+ 2ሻ + 3
+
ݏሺ ݏ+ 2ሻଶ + 3ଶ
Oryginały poszczególnych ułamków
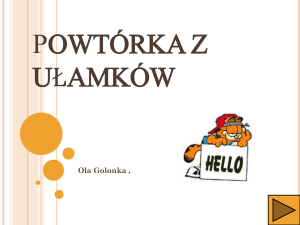
݂(ܿ = )ݐଵ +݁ ఙ௧ ሺ߁ cos ߱ ݐ− ߁ sin ߱tሻ = 1 + ݁ ିଶ௧ ሺ− cos 3 ݐ+ sin 3 ݐሻ
݂ሺݐሻ
݂ሺݐሻ = ݂ଵ ሺݐሻ + ݂ଶ ሺݐሻ
1.5
1
݂ଵ (=)ݐ1
0.5
݂ଶ ሺݐሻ = ݁ ିଶ୲ ሺ− cos 3 ݐ+ sin 3ݐሻ
0.5
1
1.5
2
2.5 t
-0.5
-1
Rys. 4 Wykres funkcji ݂()ݐ
30