Szkoła Główna Służby Pożarniczej
Katedra Techniki Pożarniczej
Zakład Elektroenergetyki
Ćwiczenie:
Badanie maszyn elektrycznych
prądu przemiennego
Opracował:
mł. bryg. dr inż. Piotr Kustra
Warszawa 2011
1.Cel ćwiczenia.
Celem ćwiczenia jest poznanie budowy, zasady działania, właściwości maszyn
asynchronicznych oraz wyznaczenie charakterystyk regulacyjnych silnika asynchronicznego.
2.Wprowadzenie teoretyczne.
Maszyny prądu przemiennego znajdują bardzo szerokie zastosowanie zarówno
w przemyśle jaj również w gospodarstwach domowych. O powszechnym zastosowaniu
decydują następujące podstawowe ich zalety:
Duża sprawność,
Niezawodność działania,
Możliwość regulacji prędkości obrotowej,
Możliwość zdalnego sterowania.
Maszyny elektryczne dzielimy z punktu widzenia zachodzących w nich przemian
energetycznych na prądnice elektryczne i silniki elektryczne.
Przedmiotem ćwiczenia będą maszyny bez komutatorowe, do których należą maszyny
elektryczne indukcyjne, pracujące zwykle, jako silniki i maszyny synchroniczne. W silnikach
indukcyjnych jest wykorzystywane pole magnetyczne wirujące wytwarzane przez uzwojenia
zasilane prądami wielofazowymi. Najważniejszą zaletą prądu trójfazowego, która
zdecydowała o jego rozpowszechnieniu, jest łatwość wytwarzania pola magnetycznego
wirującego, co umożliwiło skonstruowanie bardzo prostego w budowie i eksploatacji silnika
elektrycznego. Nie mniej ważnym była możliwość przesyłu energii elektrycznej na duże
odległości poprzez podniesienie napięcia wyjściowego generatorów prądu do wartości setek
kilowoltów, dzięki czemu obniżono przesyłane prądy z dziesiątków kiloamperów do wartości
setek amperów. Pozwoliło to zmniejszyć przekroje przewodów elektroenergetycznej sieci
przesyłowej.
Pole magnetyczne wirujące można wytworzyć za pomocą układu cewek
nieruchomych, umieszczonych w stojanie pod odpowiednim kątem względem siebie
i zasilanych prądami przesuniętymi względem siebie w fazie.
Pierwszy silnik, którego działanie polegało na wykorzystaniu pola magnetycznego
wirującego skonstruował Nikola Tesla. Zastosował on dwie cewki umieszczone w stojanie
pod kątem 900 względem siebie i zasilał je przesuniętymi względem siebie w fazie o 900
napięciami układu dwufazowego. Rozwiązanie to nie znalazło szerokiego zastosowania.
W silnikach o mocy rzędu ułamka kilowata zasilanych jednofazowo tzn. jednej fazy układu
trójfazowego, stosuje się często dwa uzwojenia i wywołuje sztuczne przesunięcie fazy prądu
w jednym z nich. Można to zrealizować przez włączenie kondensatora w szereg z tym
uzwojeniem. Praca takich silników jest podobna do pracy silników dwufazowych.
Mikrosilniki „dwufazowe” szerokie zastosowanie znalazły w automatyce np. w układach
wykonawczych.
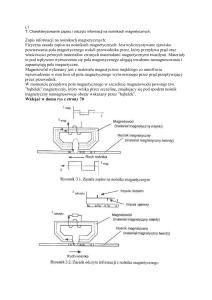
Sposób powstawania wirującego pola magnetycznego w układzie dwufazowym
zostanie wyjaśniony w oparciu o rysunek 1. Na rys.1a przedstawiono przebiegi prądów
w dwóch fazach, a na rys 1b,c,d orientacyjne obrazy pola magnetycznego dla kilku kolejnych
2
T
T
i t= . Uzwojenie każdej fazy składa się z trzech cewek, ułożonych
8
4
w trzech parach żłóbków i połączonych ze sobą w szereg. Samych żłóbków, w celu większej
przejrzystości rysunku nie zaznaczono. Na powyższym rysunku przedstawiono widok cewek
przekroju poprzecznego stojana. Cewki te rozmieszczone są równomiernie na obwodzie
stojana.
czasów t=0, t=
3
Rys.1. Powstawanie pola magnetycznego wirującego w stojanie o uzwojeniu dwufazowym:
a) przebiegi prądów b), c),d), obrazy pól w chwilach t=0 (b), t=
T
T
(c), t= (d).
4
8
W opisie tego rysunku przyjęto taką zasadę, że prąd wpływający do kartki papieru
zaznaczono krzyżykiem zaś wypływający z niej zaznaczono kropką. Jest to niezbędna dla
określenia kierunku przepływu prądu, a co za tym idzie i nakreślenie obrazu pola
magnetycznego, które wytwarza ten prąd. Jak widomo z fizyki każdemu przepływowi prądu
elektrycznego towarzyszy pole magnetyczne wirowe, obraz, którego możemy wyznaczyć za
pomocą reguły śruby prawoskrętnej, co pokazano na rysunku 2.
Rys. 2. Obraz linii sił pola magnetycznego wokół przewodnika prostoliniowego.
Jeżeli wyprostowany kciuk prawej dłoni wskazuje kierunek przepływu prądu
w przewodniku, to zgięte palce prawej dłoni obejmujące ten przewodnik wskazują zwrot linii
sił pola wokół tego przewodnika.
Kolejnym przypadkiem obrazu linii sił pola jest jego obraz, jaki wytwarza przewodnik
zamknięty np. kołowy.
Rys. 3. Obraz pola magnetycznego wytworzonego prze pojedynczy zamknięty przewodnik prądu
elektrycznego.
Jak widać na rys. 3, pole magnetyczne wytworzone przez przewodnik kołowy ma
konfigurację podobną do pola magnetycznego magnesu sztabkowego, dlatego też przewodnik
kołowy z prądem traktujemy, jako dipol magnetyczny. Kierunek pola magnetycznego
wytworzonego przez przewodnik kołowy w powiązaniu z kierunkiem prądu w przewodniku
wyznaczamy również za pomocą reguły śruby prawoskrętnej.
Pojedynczy przewodnik kołowy wytwarza stosunkowo słabe pole magnetyczne. Efekt
ten można znacznie powiększyć, stosując układ przewodników kołowych (lub innych
4
kształtów zamkniętych) połączonych w szereg. Uzyskujemy w ten sposób zwojnicę (cewkę
wielozwojową). Obraz pola magnetycznego cewki pokazany jest na rys.4.
Rys. 4. Obraz linii sil pola magnetycznego wytwarzany przez cewkę przewodzącą prąd
elektryczny.
Analogicznie wytwarzane jest pole magnetyczne wytwarzane przez dwie cewki (dwa
ramiona cewek) stojana silnika elektrycznego pokazane na rysunku 1 zasilane sinusoidalnie
zmiennym prądem elektrycznym w różnych chwilach czasu.
W chwili t=0 prąd i1=Im a i2=0 (rysunek 1a). Pole magnetyczne wytwarza w tej chwili
czasowej uzwojenie fazy 1 (pokazano to na rysunku 1b). Jeżeli przy przyjętym oznaczeniu, że
krzyżyk oznacza kierunek prądu płynącego do kartki papieru to zgodnie z regułą śruby
prawoskrętnej linie sił pola magnetycznego tych przewodników będą tworzyły krzywe
zamknięte o kierunku pokazanym na rys1b. Analogicznie z drugiego boku cewki prąd będzie
płynął od kartki papieru zaznaczono to kropką. Linie sił pola będą w tym przypadku wirować
w kierunku przeciwnym. Pokazano to narys.1b. Obraz pola magnetycznego jest taki sam jak
magnesu sztabkowego.
T
2
prądy i1= i2=
Im. Oba uzwojenia wytwarzają wspólne pole
8
2
T
magnetyczne obrócone o kąt 450 (co odpowiada ) od poprzednio wyznaczonego położenia
8
(rysunek 1c). Bieguny pola magnetycznego wyznaczają zwroty linii sił pola, tu gdzie linie sił
„wchodzą” do magnesu jest biegun S a gdzie wychodzą jest biegun N.
T
W chwili
prąd i1=0 a i2=Im.. Pole magnetyczne dla tych wartości przyjmuje
4
W chwili czasowej
ଷ
położenie pokazane na rys. 1d, co odpowiada obrotowi o kąt 900. Dla chwili czasu równej T
଼
(1350) prąd i1=-
2
2
Im a i2=
Im. Dla tej wartości czasu pole magnetyczne obróci się o kąt
2
2
1350.
5
Dla czasu równego
T
prąd i1=-Im, zaś i2=0. Pole magnetyczne stojana obróci się
2
o 1800.
Jak widać z powyższych rozważań pole magnetyczne w ciągu okresu wykona jeden
obrót. Jest to pole wirujące dwubiegunowe.
Kierunek wirowania pola magnetycznego uzwojenia dwufazowego można zmienić
przez zamianę początku z końcem uzwojenia jednej z faz, czyli przez zmianę zwrotu prądu w
uzwojeniu jednej z faz stojana, co łatwo sprawdzić opisanym wyżej sposobem.
Analogicznie można wykazać, że trzy jednakowe uzwojenia (cewki) rozmieszczone
symetrycznie na obwodzie stojana, co 1200 i zasilane prądami przesuniętymi w fazie, co 1200
wytwarzają dwubiegunowe wirujące pole magnetyczne, co pokazano na rys.5.
Rys. 5. Powstawanie pola magnetycznego wirującego w stojanie o uzwojeniu trójfazowym:
a) przebiegi prądów: b), c), d), e) obrazy pola w chwilach t=0 (b), t=
T
T
T
(c), t= (d), t= (e), co
12
6
4
odpowiada kątom: 00, 300, 600 i 900.
Początki uzwojeń oznaczono U1, V1, W1, a końce przez U2, V2, W2. Gdy prąd danej
fazy ma wartość dodatnią, to płynie od początku jej uzwojenia do końca, a przy wartości
6
ujemnej od końca do początku. Poglądowe obrazy pola magnetycznego dla chwil czasu t=0,
T
T
T
t= (300), t= (600), t= (900), przedstawiono kolejno na rysunkach 5 b,c,d,e.
12
6
4
3
3
Im a iS=Im. Prądy płynące w tych
2
2
cewkach wytwarzają pole magnetyczne dwubiegunowe zgodne z osią poziomą układu
T
współrzędnych, tzn. tworzy z osią kąt zero stopni (rys. 5b). W chwili czasu t=
(300) prąd
12
1
iR=iT= Im zaś IS=-Im . Obraz pola magnetycznego jakie wytwarzają prądy płynące w tych
2
cewkach pokazany jest na rysunku 5c. Jak łatwo zauważyć pole to jest polem
dwubiegunowym i jest obrócone o kąt 300 w stosunku do przedniego położenia. Analizując
obraz pola w kolejnych chwilach czasowych można zauważyć, że pole to wykona jeden pełny
obrót w czasie jednego okresu. Na jedną sekundę przypadnie f obrotów pola magnetycznego
wirującego. Można tak uzwoić stojan, że cewki (układu trójfazowego zasilania prądem) będą
wytwarzać pole magnetyczne o dowolnej parzystej liczbie 2p biegunów (p=1,2,3……oznacza
liczbę par biegunów). Pole magnetyczne wirujące wielobiegunowe wykonuje w czasie
jednego okresu obrót o 1/p części obwodu, a w czasie jednej sekundy, f/p obrotów. I tak np.
dla stojana nawiniętego cewkami wytwarzającymi dwie pary biegunów jeden pełny obrót pola
uzyska się po czasie dwóch okresów, tzn. że pole wiruje dwa razy wolniej niż przy jednej
parze biegunów. Wobec powyższego prędkość kątową (obrotową) pola magnetycznego
wirującego wyraża się wzorem.
Dla chwili czasu t=0 prąd iR=0 zaś iT=
ωp =
2πf
rad / s
p
n=
60 f
obr / min
p
Liczba par biegunów p jest liczba naturalną, więc przy f=50Hz pole magnetyczne
może się obracać z jedną podanych poniżej prędkości obrotowych, n zwanych prędkościami
synchronicznymi:
3000(1p), 1500(2p), 1000(3p), 750(4p), 600(5p),…
60 ⋅ 50
obr / min
p
Chcąc zmienić zwrot prędkości kątowej pola magnetycznego, wytworzonego przez
uzwojenie trójfazowe, należy zamienić ze sobą dwa dowolne przewody fazowe układu
zasilającego dane uzwojenie.
Zasada działania silnika indukcyjnego.
Silnik indukcyjny składa się ze stojana zaopatrzonego w uzwojenie wytwarzające pole
magnetyczne wirujące i z wirnika. Uzwojenia stojana są wykonywane z drutów okrągłych lub
profilowanych w oplocie bawełnianym, umieszczonych w żłobkach, od których są dodatkowo
odizolowane. Obwód magnetyczny stojana wykonany jest z blach o bardzo dobrej
7
przewodności magnetycznej i odpowiednio dużej oporności elektrycznej w celu ograniczenia
straty mocy na prądy wirowe.
Wirnik ma kształt walca utworzonego z pakietu blach o wykroju kołowym,
osadzonych na osi. Na obwodzie wirnika znajdują się otwory lub żłobki, w których
umieszczone jest uzwojenie. W zależności od sposobu wykonania uzwojenia rozróżnia się
wirniki pierścieniowe i klatkowe.
Rys.6. Widok wirnika indukcyjnego silnika pierścieniowego a) oraz wirnika klatkowego b) i c).
Wirnik pierścieniowy (rys.6a) jest uzwojony analogicznie jak stojan. Uzwojenia wirników
silników trójfazowych łączy się z reguły w gwiazdę. Konce uzwojeń faz wirnika są połączone
ze sobą, a początki są połączone z trzema odizolowanymi od osi i między sobą pierścieniami
mosiężnymi .Do pies cieni przylegają grafitowe metalizowane szczotki połączone z
opornikiem trójfazowym. Opornik ten wykorzystywany jest do rozruchu jak i do regulacji
prędkości obrotowej maszyny indukcyjnej. Metoda ta ze względu na znaczne straty energii
elektrycznej (grzanie się rezystorów regulacyjnych) tym większe im większej mocy była
maszyna obecnie nie jest stosowana. Aktualnie do regulacji prędkości obrotowej maszyny
indukcyjnej wykorzystuje się przetwornice częstotliwości.
W wirniku klatkowym kształt którego jest analogiczny jak wirnika pierścieniowego otwory w
rdzeniu stalowym są wypełnione prętami aluminiowymi lub miedzianymi połączonymi ze
sobą na obu końcach. Układ prętów wirnika przypomina swa budową klatkę (rys.6c), skąd
pochodzi nazwa wirników klatkowych. Niekiedy wirnik ten nazywany jest zwartym gdyż
pręty na obu końcach są zwarte.
Uzwojenie stojana połączone jest w gwiazdę lub trójkąt, stanowi wraz z zasilającym
je źródłem trójfazowym zamknięty obwód elektryczny, niepołączony z wirnikiem.
Uzwojenie wirnika tworzy oddzielny obwód elektryczny, sprzężony ze stojanem
tylko magnetycznie przez pole wirujące.
Dla uzyskania jak najlepszej sprawności dąży się do zminimalizowania szczeliny
powietrznej pomiędzy obwodami magnetycznymi stojana i wirnika. Minimalna wielkość
szczeliny jest podyktowana możliwością zapewnienia ruchu obrotowego wirnika. Zbyt mała
szczelina powietrzna mogłaby spowodować mechaniczne uszkodzenie maszyny podczas
ruchu wywołane niedoskonałością wykonania i spasowania jej elementów.
8
Linie pola magnetycznego wirującego, wytworzonego przez prąd w uzwojeniu
stojana, zamykają się wzdłuż drogi: stojan-szczelina- wirnik- szczelina-stojan. Efekt
wywołany przez pole magnetyczne, wirujące z prędkością ωp, jest taki, jak gdyby zewnętrzna
część silnika była magneśnicą o tej samej liczbie biegunów obracającą się również z
prędkością kątową ωp.
W celu objaśnienia zasady działania silnika indukcyjnego przedstawiono na rys.7
fragment stojana i wirnika z zaznaczeniem linii pola magnetycznego wirującego.
Rys. 7. Rysunek objaśniający zasadę działania silnika indukcyjnego.
Z chwilą włączenia uzwojeń stojana do źródła napięcia trójfazowego pole
2πf
a wirnik jeszcze się nie obraca.
magnetyczne zaczyna wirować z prędkością kątową ωp=
p
Pole przecina wówczas pręty wirnika z prędkością vp.
Na rysunku 7 wektor wirującego pola magnetycznego stojana zaznaczono strzałką nad
symbolem vp. W prętach silnika indukuje się przemienna siła elektromotoryczna opisana
wzorem:
݁ = ݒ݈ܤ
gdzie: B oznacza wartość chwilową indukcji magnetycznej w miejscu znajdowania się
rozpatrywanego pręta, v oznacza prędkość względną pręta w stosunku do pola
magnetycznego, która rożni się od prędkości pola tylko zwrotem, co pokazano na rysunku 7.
Kierunek indukowanej siły elektromotorycznej wyznacza się z reguły prawej dłoni.
Prawą dłoń należy ułożyć tak, aby linie pola były zwrócone do dłoni, odchylony duży palec w
kierunku prędkości względnej przewodu w stosunku do pola: cztery wyciągnięte palce
wskażą kierunek i zwrot siły elektromotorycznej. Na rys. 7 siła elektromotoryczna jest
zwrócona przed płaszczyznę rysunku. Gdy obwód wirnika jest zamknięty, siła
elektromotoryczna indukowana w prętach wirnika wywołuje w nich przepływ prądu i, który
przy rezystancyjnym charakterze obwodu wirnika byłby w fazie z siłą elektromotoryczną.
W polu magnetycznym stojana na pręt wirnika działa siła elektrodynamiczna, którą
można zapisać wzorem:
݈݅ܤ = ܨ
9
Oznaczenia zgodne z przedstawionymi na rys. 7. Zwrot siły elektrodynamicznej
wyznaczamy za pomocą reguły lewej dłoni, jest zgodny ze zwrotem prędkości vp pola
wirującego.
Jeżeli siła F jest dostatecznie duża wirnik zaczyna się obracać zgodnie z polem
wirującym.
Z uwagi na to, że prąd w wirniku powstaje wyłącznie dzięki indukcyjnemu działaniu pola
magnetycznego wirującego, opisany silnik nazwano silnikiem indukcyjnym.
Indukowanie się siły elektromotorycznej, a więc i prądu w wirniku jest możliwe tylko
przy istnieniu prędkości względnej przewodu względem pola magnetycznego. Stąd wynika,
że prędkość kątowa ωw (obrotowa nw) wirnika nie może się zrównać z prędkością pola ωp,
gdyż wówczas nie indukowałaby się w wirniku siła elektromotoryczna. Dla takiego stanu
prąd w wirniku byłby równy zeru, a więc znikłaby siła F utrzymująca wirnik w ruchu.
Prędkość kątowa wirnika w silniku indukcyjnym jest mniejsza od prędkości kątowej pola,
czyli wirnik obraca się z poślizgiem w stosunku do pola.
Poślizg w silniku indukcyjnym jest to względna różnica prędkości kątowej
(obrotowej) pola magnetycznego i wirnika.
s=
ω p − ωw n p − nw
n
=
= 1- w
ωp
np
np
Poślizg jest wielkością niemianowaną. Przeciętna wartość poślizgu s=0,015….0,05
przy czym mniejsza wartość dotyczy silników o mocy rzędu 100kW a większa dotyczy
silników o mocy rzędu 1kW przy obciążeniu znamionowym silnika. Przekształcając ostatni
wzór wyznaczamy zależność prędkości obrotowej wirnika silnika indukcyjnego.
nw=np(1-s)=
60 f
(1-s)
p
Z ostatniego wzoru wynika, że prędkość obrotową wirnika maszyny indukcyjnej
można regulować poprzez:
1. zmianę częstotliwości napięcia trójfazowego zasilającego silnik, jest tu możliwość
regulacji w kierunku wzrostu jak i zmniejszenia prędkości obrotowej,
2. zmianę liczby par biegunów pola magnetycznego wirującego, w tym przypadku możemy
tylko zmniejszać prędkość obrotową maszyny w stosunku do prędkości, jaką można
uzyskać dla jednej pary biegunów magnetycznego pola wirującego. Realizację regulacji
prędkości obrotowej w tym przypadku można uzyskać poprzez odpowiednie nawinięcie
cewek stojana w wyniku, czego poprzez odpowiednie przełączenia można zmieniać liczbę
par biegunów pola wirującego od jednej pary do odpowiednio dużej. Im większa liczba
par biegunów pola magnetycznego wirującego tym silnik ma mniejszą prędkość
obrotową.
3. zmianę (wzrost) poślizgu uzyskaną w wyniku dołączenia rezystancji do obwodu wirnika,
pokazane jest to na rys.6. metoda ta ma zastosowanie tylko w silnikach pierścieniowych.
Rezystory dołączone do obwodu wirnika oprócz regulacji prędkości obrotowej pozwalają
10
na bezpieczny rozruch maszyny indukcyjnej poprzez ograniczenie prądu płynącego w
obwodzie wirnika w stanie zahamowania. Stan zahamowania maszyny jest równoznaczny
ze stanem zwarcia.
Prądnica
W zestawie laboratoryjnym silnik indukcyjny sprzęgnięty jest mechanicznie z prądnicą
samowzbudną. Prądnica elektryczna jest przetwornikiem energii mechanicznej w energie
elektryczną. Działanie prądnicy oparte jest na zjawisku indukowania się siły
elektromotorycznej w przewodzie poruszającym się w polu magnetycznym. Załóżmy, że
pomiędzy biegunami elektromagnesu obraca się zwój w formie ramki z przewodu
miedzianego. Stałe, co do wartości i kierunku pole magnetyczne wytwarzane przez
elektromagnes przedstawia na rysunku wektor indukcji magnetycznej B
Rys. 8. Schemat poglądowy prądnicy (generatora) elektrycznej (a), oraz przebieg zmian
strumienia magnetycznego skojarzonego z ramką ФB a także indukowanej w niej siły
elektromotorycznej ε.
Wartość indukowanej w ramce siły elektromotorycznej ε zależy od prędkości kątowej
(obrotowej v) ramki ω, długości przewodu zanurzonego w polu magnetycznym wytworzonym
przez elektromagnes oraz od wartości indukcji magnetycznej B obejmowanej przez ramkę,
czyli ε=Blv. W rzeczywistej prądnicy mamy nie jeden zwój w postaci ramki, lecz cały zespół
zwojów tworzących uzwojenie. Uzwojenie nawinięte jest na walcu wykonanym z blach z
blach ze stali magnetycznie miękkiej, zaopatrzonym na obwodzie w żłobki, w których
znajdują się poszczególne zwoje. Walec ten wraz z uzwojeniem nazywamy twornikiem
prądnicy. Napięcie wytworzone w uzwojeniach twornika odbierane jest z prądnicy za pomocą
układu pierścieni szczotek tak jak to pokazano na rys.8a.
Część prądnicy służącą do wytwarzania pola magnetycznego nazywamy magneśnicą.
Na biegunach magneśnicy nawinięte są uzwojenia magnesujące, wytwarzające pole
magnetyczne stałe, co do kierunku (wzbudzające). W zależności od typu prądnicy
elektrycznej twornik może stanowić jej część wirującą lub część nieruchomą.
Prądnice elektryczne o mocach znamionowych powyżej 1kVA budowane są z
magneśnicą umiejscowiona w wirniku maszyny, zaś twornik umieszczony jest na części
nieruchomej (stojanie) maszyny.
Prądnica wchodząca w skład zestawu laboratoryjnego jest prądnicą z magneśnicą
znajdującą się w wirniku maszyny i wykorzystującą zjawisko pozostałości magnetycznej.
Prądnice te nazywane są samowzbudnymi gdyż nie potrzebują zewnętrznych źródeł energii
elektrycznej do zasilania uzwojeń magneśnicy.
11
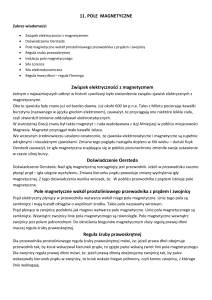
Rys. 9. Pętla histerezy materiału
ateriału magnetycznie twardego.
Dużą wartość pozostałości
pozostało magnetycznej Br mają materiały magnetycznie twarde to
znaczy, że materiały te można
żna trwale namagnesować.
namagnesowa . Materiały te charakteryzują
charakteryzuj się szeroką
pętlą histerezy. Natomiast obwód magnetyczny elektrycznego
elektrycznego obwodu twornika posada pętlę
p
histerezy bardzo wąską,, z niewielką
niewielk pozostałością magnetyczną.
Obracając magnes z polem magnetycznym szczątkowym,
szcz tkowym, w uzwojeniach twornika
(stojana) indukuje się siła elektromotoryczna sinusoidalnie zmienna. Do zacisków twornika
tw
dołączone są uzwojenia wzbudnicy (wirnika). Pod wpływem zaindukowanego napięcia
napi
w tworniku w uzwojeniu wzbudnicy popłynie prąd
pr d elektryczny. Pole magnetyczne
wytworzone pod wpływem przepływającego
przepływaj
prądu
du w uzwojeniu magneśnicy musi mieć
mie ten
sam kierunek,
ek, co pole magnetyzmu szczątkowego.
szcz tkowego. W celu uzyskania pożądanego
pożą
kierunku
przepływu prądu
du przez uzwojenie magneśnicy,
magne nicy, uzwojenie to jest połączone z uzwojenie
twornika poprzez diodę prostującą.
prostuj
Dzięki takiemu rozwiązaniu
zaniu uzyskuje się
si sumowanie
strumieni magnetycznych magnetyzmu szczątkowego
szcz tkowego ze strumieniem wytworzonym przez
prąd płynący
cy w uzwojeniu magneśnicy.
magne
Przy braku tego rozwiązania
zania prądnica
prą
by się nie
wzbudziła i na zaciskach twornika nie uzyskałoby się
si napięcia
cia znamionowego.
Materiały magnetycznie miękkie
mi
(o bardzo wąskiej pętli
tli histerezy) stosowane są
s na
obwody magnetyczne tworników prądnic,
pr dnic, obwody magnetyczne silników indukcyjnych,
transformatorów. Związane
zane jest to z tym, że dzięki wąskiej pętli
tli histerezy zmniejsza się
si straty
mocy na przemagnesowanie rdzenia magnetycznego. Wielkość
ść strat jest wprost
proporcjonalna do powierzchni histerezy.
Przetwornica częstotliwości
Przetwornice częstotliwo
stotliwości służą do przekształcania energii elektrycznej prądu
pr
przemiennego o określonych
lonych parametrach (napięcie,
(napi
częstotliwość)
ść) na energię
energi prądu
przemiennego o zadanych parametrach zgodnych z wymaganiami użytkownika.
u
Za ich
pomocą można
na płynnie regulować
regulowa prędkość obrotową silników (asynchronicznych)
napędzających różne urządzenia
dzenia np. wentylatory, pompy sieci wodociągowej,
wodoci wej, przenośnikach,
przeno
taśmociągach, widach itp.
12
Przetwornica częstotliwości utrzymuje zadaną charakterystykę momentu obciążenia
silnika dzięki kontroli stosunku napięcia wyjściowego do częstotliwości prądu wyjściowego
U
U
( ) oraz prądu obciążenia. Przy stałej wartości
strumień magnesujący silnika jest stały
f
f
(pola magnetycznego wirującego), co powoduje utrzymanie stałego momentu obrotowego
silnika.
Zapobiega również nadmiernemu wzrostowi prądu magnesującego w przypadku
regulacji w dół prędkości obrotowej maszyny indukcyjnej. Jak wiadomo z podstaw
elektrotechniki uzwojenie stojana silnika może być przedstawione w schemacie zastępczym,
jako szeregowe połączenie oporności indukcyjnej (XL=2пfL) i rezystancji. Przy zmniejszaniu
częstotliwości oporność indukcyjna maleje a co za tym idzie maleje całkowita oporność
uzwojenia Z=
(2πfL )2 + R 2 .
Dla częstotliwości równej pojedynczym Hertzom oporność
uzwojenia jest praktycznie równa rezystancji tego uzwojenia, wówczas prąd uzwojenia może
być równy prądom zwarcia.
Schemat poglądowy przetwornicy częstotliwości przedstawia rys.10.
Rys. 10. Schemat poglądowy przetwornicy częstotliwości.
Jak widać na rysunku nowoczesne przetwornice częstotliwości pozwalają na regulację
prędkości obrotowej jak również pełnią rolę zabezpieczeń silników indukcyjnych.
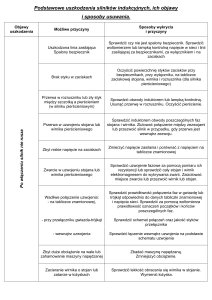
Stany niebezpiecznej pracy maszyny indukcyjnej to:
a) Przeciążenie silnika, gdy moment obciążający wał silnika jest większy od momentu
napędowego maszyny. Przy zbyt długotrwałym przeciążeniu wzrasta temperatura wnętrza
maszyny, przy zbyt niebezpiecznych jej wzrostach układ kontroli wyłączy zasilanie
silnika i zatrzyma go.
b) Zbyt niskie napięcie zasilające silnik przy obciążeniu nominalnym wału maszyny. W
takich warunkach pracy przy zbyt niskim napięciu zasilającego maszynę w celu
pokonania oporów, jakie stwarza stałe obciążenie na wale maszyny silnik będzie pobierał
znacznie większy prąd zgodnie z zależnością: P=U·I·cosφ. Jeżeli maleje U to musi rosnąć
I aby iloczyn tych wartości był stały. Przy zbyt niskim napięciu zasilania silnik zostanie
przez zabezpieczenia odłączony od sieci.
c) Układ zabezpieczenia monitoruje również liczbę faz zasilających maszynę przy zaniku
jednej fazy zasilania silnik pracuje nadal, zaś przy zaniku dwóch faz układ zabezpieczenia
odłącza maszynę od sieci zasilającej.
13
Współczesna przetwornica częstotliwości jest specjalizowanym mikrokomputerem.
Porzez odpowiednie moduły wejściowe możliwe programowanie pracy przetwornicy z
komputera, jak również za pomocą panelu operatorskiego można odczytywać niezbędne dane
o pracy maszyny.
Pomiary laboratoryjne
Pomiary zostaną przeprowadzone dla silnika asynchronicznego klatkowego zasilanego
przez przetwornicę częstotliwości oraz prądnicy samowzbudnej. Silnik jest zamontowany na
wspólnej podstawie z prądnicą prądu przemiennego a wirniki tych maszyn są połączone za
pomocą sztywnego sprzęgła.
Zadanie 1.
Określić typ i wpisać dane znamionowe maszyn na podstawie tabliczek znamionowych.
Typ przetwornicy…………………
Typ silnika ………………………
Pn ………………………………..
In …………………………………
Un ………………………………..
Typ prądnicy ………………………….
Pn ………………………………………
In ……………………………………….
Un ……………………………………..
nn ………………………………………
Zadanie 2.
Pomiar rezystancji uzwojenia prądnicy.
Pomiar rezystancji uzwojenia prądnicy należy wykonać omomierzem dwukrotnie raz,
gdy silnik jest zimny na początku ćwiczenia i po raz drugi, gdy silnik jest ciepły na
zakończenie ćwiczenia. Dla silnika zimnego i ciepłego obliczamy średni przyrost temperatury
podczas pracy maszyny (przy odrabianiu ćwiczenia) według wzoru:
Wyniki pomiaru rezystancji i temperatury uzwojeń zimnych zanotować:
RZ=…………………
υz=………………………….
oraz ciepłych zanotować: R g=………………
14
Zadanie 3.
Badanie stanu jałowego maszyn.
Badanie stanu jałowego maszyn przeprowadzamy w układzie przedstawionym na
rysunku 11.
Rys. 11 Układ pomiarowy do badania maszyn prądu przemiennego:
a) stan jałowy norze wyłącznika W-2 otwarte prądnica niej jest obciążona prądem,
b) stan obciążenia W-2 zamknięty prądnica obciążona odbiornikiem rezystancyjnym
regulowanym.
Podczas badań stanu jałowego obciążenie prądnicy jest odłączone, wyłącznik W-2 w
pozycji otwartej. Po załączeniu układu ustawić wartości znamionowe silnika (napięcie,
częstotliwość). Autotransformatorem obniżamy napięcie i notujemy wskazania mierników Po
wykonaniu kilku punktów pomiarowych ustawiamy z powrotem napięcie znamionowe i
zmieniamy częstotliwość. Dla każdej zmienionej częstotliwości wskazania mierników oraz
odczyt z panelu kontrolnego notujemy w tabeli 1.
Tabela1
Zadanie 4.
Badanie maszyn w stanie obciążenia.
Próbę obciążenia silnika i prądnicy przeprowadza się przy dołączonym do zacisków
wyjściowych prądnicy regulowanej rezystancji, W-2 w pozycji zamkniętej (rys.11).
Poprzez zmianę częstotliwości napięcia zasilającego (przetwornica) oraz zmianę rezystancji
obciążenia uzyskuje się różną moc oddawaną przez silnik i prądnicę otrzymane wyniki
pomiarów zanotować w tabeli 2.
15
Tabela 2. Wyniki pomiarów i obliczeń dla stanu obciążenia maszyn prądu przemiennego
Obliczenia należy wykonać korzystając z następujących wzorów:
Zadanie 5.
Badanie stanów awaryjnych.
W układzie jak na rys.11 należy przeprowadzić następujące stany awaryjnej pracy
sieci zasilającej:
a) Autotransformatorem obniżać napięcie sieci zasilającej przetwornicę do momentu
pojawienia się ostrzeżenia na panelu operatorskim przetwornicy,
b) Zasymulować zaniki faz zasilania przetwornicy najpierw jednej, potem dwóch.
Podczas Tyc prób należy zanotować:
1. Czas reakcji układu sterowania przetwornicy na zaistniałe nieprawidłowości w układzie
zasilania.
2. Sposób reakcji.
3. Komunikaty ostrzegawcze wyświetlacz panelu operatorskiego.
Opracowanie wyników pomiarów
•
•
•
Uzupełnić tabele o odpowiednie obliczenia.
Narysować charakterystyki biegu jałowego tzn. cosФ, I, P=f(U), P, I=f(n) dla silnika oraz
U=f(n) dla prądnicy,
Narysować charakterystyki obciążenia tzn. cosФ, I, η=f(P),
Pytania kontrolne
1.
2.
3.
4.
Podaj warunki konieczne do wytworzenia pola magnetycznego wirującego.
Omów pokrótce zasadę działania silnika indukcyjnego.
Czym różni się w budowie i zasadzie działania silnik klatkowy i pierścieniowy.
Wymień i pokrótce omów sposoby regulacji prędkości obrotowej silników
indukcyjnych.
5. Przetwornikiem, jakiej energii, na jaką jest silnik elektryczny i jakim przetwornikiem
energii jest prądnica
6. Opisz zasadę działania prądnicy prądu zmiennego.
16
7. Jak działa prądnica samowzbudna.
8. Omów pokrótce właściwości przetwornicy częstotliwości, (jakie zadania spełnia we
współpracy z maszynami indukcyjnymi).
9. Jakie konsekwencje powodują stany przeciążenia i awarii zasilania w silnikach
indukcyjnych.
Literatura:
• Roman Kurdziel - „Podstawy elektrotechniki”, WNT, 1965
• Elżbieta Goźlińska - „Maszyny elektryczne”, WSiP, 2007
• Stanisław Bolkowski - „Elektrotechnika”, WSiP, 2006
• Eugeniusz Koziej - „Elektrotechnika ogólna”, wyd. Politechnika Warszawska, 1986
17