EEA - ściąga3.doc
(93 KB) Pobierz
EA 5
Silnik 2-fazowy indukcyjny wykonawczy
Silniki wykonawcze są przetwornikami elektromechanicznymi przeznaczonymi do otrzymywania jednoznacznej zależności funkcyjnej odpowiedzi mechanicznej, którą może być kąt obrotu wału lub prędkość obrotowa
od elektrycznego sygnału sterującego, którym może być wartość lub faza napięcia sterującego. Silnik wykonawczy indukcyjny dwufazowy ma dwa uzwojenia umieszczone w stojanie. Osie uzwojeń są przesunięte
względem siebie o kąt 90°. Jedno z uzwojeń, uzwojenie wzbudzenia, jest zasilane napięciem o stałej amplitudzie, natomiast drugie uzwojenie, uzwojenie sterowania, zasilane jest napięciem o regulowanej amplitudzie
przy stałym przesunięciu fazowym -90° względem napięcia wzbudzenia (sterowanie amplitudowe), lub napięciem o stałej amplitudzie przy zmiennym przesunięciu fazowym (sterowanie fazowe). Możliwa jest
równoczesna regulacja amplitudy i fazy uzwojenia sterującego (sterowanie amplitudowo-fazowe).
Zmiana napięcia sterującego powoduje zmianę proporcji pomiędzy składową zgodną i przeciwną napięcia co przy dużej rezystancji wirnika umożliwia regulację prędkości obrotowej od zera do prędkości
podsynchronicznej.
Schemat silnika wykonawczego dwufazowego
Wirnik może mieć różne wykonanie:
a) klasyczne – wirnik klatkowy, długi wirnik (L/D=2..3), szczelina powietrzna: 0.025..0.1 mm
b) wirnik kubkowy (silnik Ferrarisa) – kubek najczęściej z aluminium o grubości ok. 0.2 do 1mm, szczelina powietrzna ok. 0.3..1.5 mm
c) silniki klatkowe o małym momencie bezwładności:
d) silniki z wirnikami ferromagnetycznymi
e) silniki o innych topologiach, np.: silniki tarczowe: płaskie uzwojenia drukowane (tarcza) wirnika oraz uzwojenia drukowane stojana (druk o grubości ok. 0.01..0.5mm); dopuszczalna gęstość prądu w pracy dorywczej
do 100A/mm2.
EA 6
Silnik skokowy reluktancyjny
Badany silnik działa wyłącznie w oparciu o moment elektromagnetyczny reluktancyjny, tj. moment, którego generacja wynika z asymetrii magnetycznej wirnika i ew. stojana. W silniku ćwiczeniowym asymetryczny
magnetycznie jest zarówno wirnik jak i stojan. Cewki uzwojenia silnika nawinięte są na 8 zębach stojana (a więc jest ich 8). Każde dwie przeciwległe cewki połączone są szeregowo w jedno pasmo, w taki sposób, że
strumienie magnetyczne tych cewek dodają się. Wirnik jest całkowicie bierny, ferromagnetyczny, lity, 6-zębowy. Przełączając prąd w kolejnych pasmach uzyskuje się ciągłą generacje momentu i – w konsekwencji –
ciągły ruch wirnika – kolejno zasilone pasma przyciągają kolejne pary (przeciwległych) zębów wirnika.
Znane są dwa rodzaje reluktancyjnych silników skokowych: o jednym zębie wirnika na biegun stojana i o kilku zębach wirnika na biegun stojana. Układ w którym uzwojenie dwu przeciwległych biegunów stojana
tworzy pasmo nazywamy symetrycznym. Możliwe jest też rozwiązanie niesymetryczne, wtedy całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. W rozwiązaniu niesymetrycznym nadmiernie
zużywają się łożyska a praca jest hałośliwa.
Zasada działania: działanie silnika skokowego opiera się na wykorzystaniu momentu reluktancyjnego. Strumień w obwodzie magnetycznym jest funkcją przepływu (Iż) oraz reluktancji (oporu magnetycznego) Rm.
Φ=Iż/Rm
Reluktancja jest najmniejsza przy kącie Θ=0. Linie pola magnetycznego wykazują dążenie do zamknięcia się w obwodzie o najmniejszej reluktancji. W ten sposób powstaje moment obrotowy zwany reluktancyjnym,
który dąży do ustawienia wirnika w położeniu Θ=0. Na tej zasadzie działa silnik skokowy o wirniku reluktancyjnym, który ma wirnik wykonany z miękkiej magnetycznie stali oraz uzębiony stojan z trzema pasmami
uzwojenia, zasilanymi impulsami z układu elektronicznego zgodnie z cyklogramem impulsów.
Najważniejsze własności silników skokowych:
- skok znamionowy [deg]
- liczba pasm uzwojenia
- znamionowe napięcie zasilania [V]
- max. moment rozruchowy [Ncm]
- max. częstotliwość rozruchu [Hz]
- max. częstotliwość pracy [Hz]
Maksymalną częstotliwość rozruchową silnika należy wyznaczyć przez nastawienie żądanej częstotliwości na generatorze i następnie próbę startu silnika z tą częstotliwością – silnik albo ruszy albo nie. Wadą takiego
podejścia jest niemożność wychwycenia sytuacji kiedy silnik rusza, ale podczas pracy gubi niektóre skoki. Wartość maksymalnej częstotliwości rozruchowej należy zmierzyć jako częstotliwość przełączeń prądu pasma
A lub B. Rejestracje przebiegów czasowych prądów pasm A, B należy przeprowadzić dla pracy całoskokowej i półskokowej, dla każdego sterowania przy dwóch istotnie różnych prędkościach obrotowych:
1.na tyle małej żeby prąd miał przebieg czasowy prawie prostokątny, a poszczególne skoki silnika były dobrze widoczne (praca pojedynczoskokowa),
2.zbliżonej do maksymalnej startowej (prąd silnie odkształcony od prostokąta i praca płynnoskokowa).
Przy wyznaczaniu stałych czasowych należy pamiętać o tym, żeby prąd płynął w takim kierunku jak podczas normalnej pracy silnika, dlatego „+” zasilacza powinien być w punkcie gwiazdowym silnika. Opornica
suwakowa 8.9 Ω powinna być włączona bezpośrednio za zasilaczem, aby przy zwarciu pasma nie zewrzeć zasilacza.
Rezystancję pasma w stanie nagrzanym mierzy się na paśmie A, które po wszystkich pomiarach ćwiczeniowych niewątpliwie jest nagrzane. Rezystancję pasma w stanie zimnym mierzy się na paśmie C, które
fizycznie jest najbardziej odległe od pasma A i dlatego w miarę „zimne”. Podczas pomiarów nie należy przekraczać prądu 0.5 A..
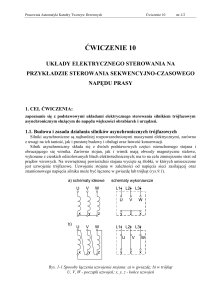
EA 7
Sterowanie silnika skokowego
Zastosowany w ćwiczeniu silnik jest najbardziej typowym, 2-pasmowym silnikiem skokowym tzw. hybrydowym, tzn. takim, którego moment elektromagnetyczny jest generowany częściowy dzięki magnesom
trwałym na wirniku, a częściowo dzięki asymetrii magnetycznej wirnika i ew. stojana (moment reluktancyjny). Łączy on w sobie duży moment napędowy (ze względu na magnesy trwałe), dużą częstotliwość pracy (ze
względu na zmienną reluktancję wzdłuż obwodu magnetycznego) z dobrymi własnościami tłumienia drgań i małą wrażliwością na zjawiska rezonansowe.
Układ sterowania odgrywa decydującą rolę w kształtowaniu pożądanych charakterystyk silników krokowych. Zasadniczy rozwój silników krokowych zmierza w kierunku zwiększenia liczby skoków, sprawności i
momentu obrotowego a zmniejszeniu inercji mechanicznej. O parametrach napędu skokowego decyduje konstrukcja mechaniczna danego obiektu i silnika, własności elektryczne i magnetyczne materiałów, z których
wykonano silnik oraz sposób zasilania jego uzwojeń i wreszcie algorytm sterowania.
Sterowanie bipolarne i unipolarne silników krokowych. Wśród silników krokowych można wyróżnić dwa podstawowe typy: unipolarne i bipolarne. Silnik bipolarny o dwóch fazach ma jedno uzwojenie na fazę,
natomiast unipolarny ma jedno uzwojenie z odczepem pośrodku. Istnieją także silniki posiadające po dwa uzwojenia na fazę. Mogą one pracować zarówno w trybie unipolarnym jak i bipolarnym. Przy sterowaniu
bipolarnym całe pasmo uzwojenia bierze jednocześnie udział w pracy natomiast przy sterowaniu unipolarnym jednocześnie jest włączona połowa pasma.
W silniku bipolarnym do zmiany pola magnetycznego w rdzeniu wystarcza jeden przełącznik dwupozycyjny, lub dwa tranzystory włączane na przemian. W przypadku silnika unipolarnego do kluczowania prądu
wystarczy jeden tranzystor na fazę. Sterowanie unipolarne zapewnia przepływ prądu w danym uzwojeniu tylko w jednym kierunku, podczas gdy sterowanie bipolarne zapewnia przepływ prądu w dwóch kierunkach .
Zaletą wariantu unipolarnego jest prostszy układ połączeń i mniejsza liczba tranzystorów, wadą zaś to ,że jednocześnie pracuje tylko połowa uzwojenia, a zatem nie wytwarza się moment obrotowy o pełnej wartości.
Zaletą sterowania bipolarnego jest dobre wykorzystanie momentu obrotowego dzięki temu, że całe uzwojenie jest w stanie prądowym po otrzymaniu impulsu.
Najpowszechniejsze rodzaje sterowania to:
-falowe,
-pełnokrokowe,
-półkrokowe ,
-mikrokrokowe.
W sterowaniu falowym inaczej zwanym jednofazowym w danym momencie zasilana jest jedna faza . W przypadku silnika dwufazowego stojan jest zasilany zgodnie z sekwencją AB ®AB®AB®AB. Wynikiem tego
rodzaju sterowania jest wykonanie pełnego kroku. Wadą takiego sposobu sterowania jest to, że silniki o uzwojeniach unipolarnych wykorzystują tylko 25%,a o uzwojeniach bipolarnych 50% całkowitego uzwojenia
silnika w danej chwili czasu. Oznacza to, że nie wykorzystuje się maksymalnego momentu wyjściowego silnika.
W sterowaniu dwufazowym inaczej pełnokrokowym w każdej chwili czasu zasilane są dwie fazy stojan jest zasilany zgodnie z sekwencją AB ®AB®AB®AB. Wynikiem tego rodzaju sterowania są takie same ruchy
jak przy sterowaniu jednofazowym z tym, że pozycja wirnika jest przesunięta o pół kroku.
Sterowanie półkrokowe jest kombinacją sterowania dwufazowego i jednofazowego. Co drugi krok jest zasilana tylko jedna faza, a w pozostałych krokach dwie fazy. Stojan silnika dwufazowego jest zasilany zgodnie z
sekwencją AB®B®AB®A®AB®B®AB®A. Wynikiem tego są obroty wirnika równe połowie tych ze sterowania z jedną lub dwiema fazami włączonymi. Sterowanie pół krokowe może zredukować efekt rezonansu
mechanicznego, który ujawnia silnie w dwóch poprzednich rodzajach sterowania.
W sterowaniu mikrokrokowym prądy w uzwojeniach zmieniają się płynnie rozbijając w ten sposób pełen krok na wiele mniejszych kroczków. Praca z mikrokrokiem polega na obracaniu polem magnetycznym stojana
w sposób bardziej płynny niż w sterowaniu pełno i półkrokowym powoduje to mniejsze drgania i umożliwia bezszumowe poruszanie silnika do poziomu częstotliwości 0Hz. Dzięki pracy z mikrokrokiem możliwe jest
uzyskanie dokładniejszego pozycjonowania. Istniej wiele różnych typów mikrokroku o podziale od 1/3 do 1/32 pełnego kroku lub jeszcze mniejszym. Silnik krokowy jest silnikiem synchronicznym. Oznacza to, że
stabilne położenia zatrzymania wirnika jest zsynchronizowane z polem magnetycznym stojana. Obroty wirnika uzyskuje się przez obracanie pola, wirnik podąża do nowego położenia stabilnego.
Zasada działania silników skokowych opiera się na dyskretnych zmianach pola elektromagnetycznego w szczelinie silnika. Przy przechodzeniu pola magnetycznego z cyklicznie powtarzających się położeń, których
liczba jest zawsze większa od dwóch na jeden pełny obrót, w kolejne ustalone położenie, silnik rozwija moment synchronizujący wytworzony na zasadzie elektromagnetycznej lub reluktancyjnej, powodujący
odpowiednie przesunięcie się wirnika.
W każdym silniku skokowym niezależnie od czasu trwania impulsu zasilającego fazę uzwojenia silnika, jednokrotny impuls prądu tam płynący powoduje tylko jeden skok o kąt mniejszy niż 180°. Dlatego też droga
kątowa wirnika w tymże silniku jest taka sama dla każdego impulsu prądowego, jeśli tylko ten nie przekracza pewnej granicznej wartości. W efekcie końcowym wirnik silnika zawsze zatrzymuje się w tych samych
położeniach zwanych pozycyjnymi.
Rozróżniamy silniki skokowe:
- magnetoelektryczne;
- reluktancyjne;
- hybrydowe;
- tarczowe
Charakterystyki mechaniczne silnika skokowego
A – krzywa momentu pracy; B – krzywa momentu rozruchowego
EA 8
Prądnice tachometryczne
Ogólnie przyjmuje się, że główną wadą tachoprądnicy komutatorowej jest generowanie w napięciu wyjściowym częstotliwości związanych z pracą komutatora i szczotek. Są to jednak częstotliwości >1 kHz i w
związku z tym można je łatwo odfiltrować przed ew. dalszą obróbką sygnału. Trudniejsze do usunięcia są pojawiające się w napięciu składowe o częstotliwości „obrotowej” i ich kolejne harmoniczne np. 4, 8 itp.
Częstotliwość obrotowa n.p. przy 3000 obr/min wynosi 50 Hz, a przy 2000 obr/min - 33.3 Hz. Przyczynami powstawania wyższych harmonicznych obrotowych są również niedokładności wykonania tachoprądnic (n.p.
mimośrodowość wirnika, jego eliptyczność i tp.)
Prądnica tachometryczna synchroniczna o budowie klasycznej posiada magnesy trwałe na wirniku i jedno- lub wielopasmowe uzwojenie w stojanie. Częstotliwość napięcia wyjściowego jest proporcjonalna do
częstotliwości obrotowej zgodnie z zależnością fs = pfr , gdzie p - liczba par biegunów. Przy wyjściu zmiennonapięciowym wymaga ona zastosowania specjalnie dobranego woltomierza.
Prądnice tachometryczne (PTM) są to specjalne maszyny elektryczne służące do pomiaru prędkości obrotowej lub przetwarzania ruchu obrotowego na wielkość elektryczną. Podstawowym wymaganiem stawianym
PTM jest utrzymanie proporcjonalności
wytwarzanego przez nie napięcia do prędkości wirowania (przy zachowaniu stałego strumienia magnetycznego). Charakterystyka zewnętrzna prądnicy tachometrycznej jest linią prostą. Jednak w wyniku przepływu
prądu przez uzwojenie twornika, napięcie na tym uzwojeniu obniża się i charakterystyka zagina się. Konstrukcja PTM powinna być taka, aby wpływ spadku napięcia na prostoliniowość charakterystyki był możliwie
mały. Prostoliniowość charakterystyki zależy również od wartości rezystancji obciążenia i polepsza się wraz z jej wzrostem. Jeżeli uzwojenie robocze umieszczone jest na wirniku to dalszym źródłem błędu może być
komutator i szczotki. Rezystancja przejścia szczotek i komutatora zmienia się w zależności od prędkości wirowania i dlatego uzwojenie robocze w miarę możliwości jest umieszczane na stojanie. Prędkość kątowa
obrotowa wirnika może być wyrażona jako pierwsza pochodna kąta obrotu. Stąd PTM mogą być z powodzeniem stosowane w układach liczących jako elementy różniczkujące. Dalsze wymagania stawiane PTM są
następujące:
mała elektromechaniczna stała czasowa
pewność pracy
cichobieżność
nie wytwarzanie zakłóceń radiowych
możliwie małe wymiary
mały ciężar
stałość parametrów w czasie (dotyczy prądnic z magnesami trwałymi)
Prądnice tachometryczne prądu stałego
W prądnicy samowzbudnej pole magnetyczne jest wytwarzane przez magnes trwały. W tym polu obraca się wirnik. Pakiet wirnika jest wykonany z blach krzemowych. Uzwojenie wirnika jest przyłączone do
komutatora. Napięcie indukowane w uzwojeniu wirnika podczas jego wirowania jest doprowadzone z komutatora do tabliczki zaciskowej za pośrednictwem
szczotek.
Budowa prądnicy obcowzbudnej prądu stałego nie różni się niczym od budowy obcowzbudnego silnika prądu stałego. Pakiet stojana i wirnika tej prądnicy są wykonane z blach krzemowych. Stojan ma wydatne
bieguny, na których jest umieszczone uzwojenie
wzbudzenia. Wirnik jest wykonany podobnie jak w samowzbudnej prądnicy tachometrycznej. W obcowzbudnych PTM decydujący wpływ na wartość napięcia wyjściowego ma wartość napięcia wzbudzenia. Wahania
tego napięcia mogą spowodować poważny uchyb pomiaru.
Prądnice tachometryczne prądu przemiennego
Najprostszą i najtańszą prądnicą tachometryczną prądu przemiennego jest synchroniczna prądnica tachometryczna o trwałym magnesie w wirniku. Wewnątrz stojana wykonanego z blach krzemowych wiruje trwały
magnes o wydatnych biegunach. W żłobkach stojana jest umieszczone uzwojenie robocze. W czasie obracania się wirnika, w uzwojeniu roboczym indukuje się siła elektromotoryczna. Indukowana siła
elektromotoryczna jest proporcjonalna do prędkości obrotowej
wirnika. Jednakże PTM tego typu ma poważną wadę. Mianowicie, częstotliwość wytwarzanego napięcia zmienia się proporcjonalnie do prędkości wirowania. Ponieważ reaktancja XL jest zależna od częstotliwości, w
czasie pracy wartość jej ulegnie zmianie. Powoduje to zmianę spadku napięcia na tworniku nawet przy niezmiennej wartości czysto
czynnego obciążenia zewnętrznego. Jeżeli impedancja obciążenia zewnętrznego zawiera składową bierną, wpływ zmian częstotliwości jest jeszcze większy. Zmiany te uniemożliwiają uzyskanie w prądnicach tego typu
liniowej charakterystyki zewnętrznej, co z kolei poważnie ogranicza możliwości stosowania synchronicznych PTM. Prądnice tego typu nadają się
jedynie do mierzenia prędkości obrotowej, w połączeniu z odpowiednio wyskalowanym woltomierzem.
Pomiar statycznych charakterystyk wyjściowych Uwy(n). Przy wyznaczaniu charakterystyki wyjściowej prędkość obrotową reguluje się napięciem zasilania silnika napędowego, a pomiaru prędkości obrotowej
dokonuje się metodą stroboskopową. Jednocześnie mierzy się prędkość za pomocą impulsatora i częstościomierza – zliczając ilość impulsów za określony okres.
Analiza zawartości harmonicznych w widmie napięcia wyjściowego.Po zarejestrowaniu danych dokonuje się ich przeglądu i dalszej obróbki (analiza harmonicznych) przy pomocy programu look2.exe .
Po dokonaniu analizy harmonicznych, wykorzystując w programie opcję zapis otrzymuje się plik cyfrowy, który należy skopiować na swoją dyskietkę.
EA 9
Czujniki położenia
Transformator położenia kątowego jest małą maszyną indukcyjną przeznaczoną do pracy jako precyzyjny przetwornik położenia kątowego na napięcie elektryczne. W przypadku transformatora sinusowocosinusowego (taki jest badany na stanowisku ćwiczeniowym) amplitudy napięć wyjściowych powinny być proporcjonalne odpowiednio do sinusa i cosinusa kąta położenia wirnika. Od takich transformatorów,
stosowanych najczęściej w precyzyjnych urządzeniach automatycznej regulacji i sterowania, wymaga się dużej dokładności odwzorowania położenia kątowego w sygnał elektryczny. Badany indukcyjny czujnik
położenia liniowego składa się z dwóch identycznych, połączonych szeregowo cewek, wewnątrz których przemieszcza się częściowo ferromagnetyczny rdzeń. Reaktancje obu uzwojeń zależą od położenia rdzenia.
Zasada działania transformatora położenia kątowego. Transformator położenia kątowego (TPK) zbudowany jest z dwóch uzwojeń na stojanie i dwóch na wirniku. Uzwojenia te są przesunięte względem siebie o kąt
90°. TPK można wykorzystać do pomiaru kąta położenia poprzez zasilanie jednego uzwojenia stojana, wytwarzając w ten sposób pole pulsujące w rdzeniu maszyny. Pole pulsujące powoduje powstanie siły
elektromotorycznej w uzwojeniach wirnika, przy czym z uwagi na przesunięcie osi uzwojeń o 90° wartość siły elektromotorycznej w jednym z uzwojeń jest proporcjonalna do sinusa kąta położenia, natomiast w drugim
uzwojeniu do kosinusa kąta położenia. Taki TPK nazywa się sinusowo-kosinusowym. W przypadku, gdy TPK jest obciążony (w uzwojeniach wirnika płyną prądy) następuje zakłócenie pola pulsującego i wówczas
wymagana jest kompensacja wpływu pól zakłócających realizowana poprzez wykorzystanie drugiego uzwojenia stojana i odpowiednie dopasowanie impedancji włączonych do poszczególnych uzwojeń TPK. Innym
sposobem wykorzystania TPK jest zasilenie dwóch uzwojeń stojana napięciami przesuniętymi o kąt 90° w dziedzinie czasu uzyskując w ten sposób w szczelinie powietrznej wirujące pole kołowe. Pole kołowe powoduje
wytworzenie w wirniku siły elektromotorycznej o stałej amplitudzie i zmiennym przesunięciu fazowym pomiędzy napięciem stojana a napięciem wirnika.
Sygnałem wyjściowym jest w takim przypadku kąt przesunięcia fazowego. Zwykle przy takim sposobie pomiaru kąta wykorzystywane jest tylko jedno uzwojenie wirnika. Wymagana jest: ściśle sinusoidalna zmienność
indukcyjności wzajemnej pomiędzy uzwojeniami stojana i wirnika. Podstawowy stan pracy to powolny, względem prędkości synchronicznej, ruch wirnika względem stojana.
Parametry charakterystyczne TPK:
- napięcie zasilające: 2, 10, 12, 15, 26, 30, 60, 90V
- częstotliwość: 400, 2000÷10000Hz
- przekładnia napięciowa: 0.45÷0.46, 0.56÷0.58,
- impedancja wejściowa i wyjściowa: kilkaset- kilka tysięcy Ω
- prędkość maksymalna 100 , <10000 obr/min
- błąd amplitudy:<0.09÷0.3%
- błąd kątowy: 3÷10’
- napięcie szczątkowe 1÷2mV na każdy 1 V napięcia zasilającego
- błąd prostopadłości uzwojeń: 3÷10’
Pomiar przekładni napięciowych
Uzwojenie wzbudzenia zasilane jest z generatora napięciem sinusoidalnym o częstotliwości
2 kHz. Należy zmierzyć wa...
Plik z chomika:
JareckiKrk
Inne pliki z tego folderu:
2kolokwium.docx (5292 KB)
IMG_0493 1.JPG (974 KB)
IMG_0495 1.JPG (1033 KB)
IMG_0494 1.JPG (1007 KB)
K!_b.jpg (870 KB)
Inne foldery tego chomika:
Zgłoś jeśli naruszono regulamin
Strona główna
Aktualności
Kontakt
Dział Pomocy
Opinie
Regulamin serwisu
Polityka prywatności
Copyright © 2012 Chomikuj.pl
EA1
instrukcje do ćwiczeń
sprawozdania rozne