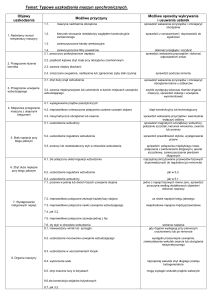
Ściąga - EEA2.doc
(308 KB) Pobierz
Silniki krokowe
Silnik krokowy jest urządzeniem elektromechanicznym, które przekształca impulsy elektryczne w dyskretne ruchy mechaniczne. Oś silnika krokowego obraca się o niewielkie przyrosty kąta pod
wpływem impulsów elektrycznych, podawanych w odpowiedniej kolejności. Obroty silnika są związane bezpośrednio z podawanymi impulsami na kilka sposobów. Kierunek obrotów osi jest
ściśle związany z sekwencją podawanych impulsów, prędkość obrotów zależy od częstotliwości tych impulsów, a kąt obrotu - od ich ilości. Czeste zastosowanie silników krokowych można
zaobserwować w automatyce przemysłowej (ciekawy opis podstaw w serwisie milf )
RODZAJE SILNIKÓW KROKOWYCH I ICH WŁAŚCIWOŚCI
Rodzaj zastosowanego silnika jego budowa oraz wynikające z tego różne możliwe sposoby sterowania sprawiają , że konstruując sterownik należy wziąć pod uwagę właściwości poszczególnych
rodzajów silników ponieważ cechy silnika ściśle rzutują na sposoby rozwiązania sterowania a w konsekwencji na właściwości całego układu napędowego.
W niniejszym opisie omówiono różne rodzaje silników krokowych i ich właściwości. Poruszono zagadnienia z różnymi stanami pracy silników, możliwymi sposobami sterowania oraz sposoby
eliminacji niekorzystnych zjawisk występujących podczas ich pracy a w szczególności ograniczenia drgań i rezonansów.
BUDOWA SILNIKÓW KROKOWYCH I ICH WŁAŚCIWOŚCI
Obecnie istnieje duża liczba różnorodnych typów silników krokowych i jest możliwe pojawienie się nowych. W chwili obecnej wydaje się być aktualna klasyfikacja przedstawiona na rysunku
poniżej.
Zalety:
Kąt obrotu silnika jest proporcjonalny do ilości impulsów wejściowych.
Silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są zasilane).
Precyzyjne pozycjonowanie i powtarzalność ruchu - dobre silniki krokowe mają dokładność ok. 3 - 5% kroku i błąd ten nie kumuluje się z kroku na krok.
Możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku.
Niezawodne - ze względu na brak szczotek. żywotność silnika zależy zatem tylko od żywotności łożysk.
Zależność obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli otwartej, przez co silnik krokowy jest łatwiejszy i tańszy w sterowaniu.
Możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem umocowanym bezpośrednio na osi.
Szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest proporcjonalna do częstotliwości impulsów wejściowych.
Jedną z najbardziej znaczących zalet silnika krokowego jest możliwość dokładnego sterowania w pętli otwartej. Praca w pętli otwartej oznacza, że nie potrzeba sprzężenia zwrotnego - informacji
o położeniu. Takie sterowanie eliminuje potrzebę stosowania kosztownych urządzeń sprzężenia zwrotnego, takich jak enkodery optoelektroniczne. Pozycje znajduje się zliczając impulsy wejściowe.
Wady:
Rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu.
Trudności przy pracy z bardzo dużymi prędkościami.
Podstawowe rodzaje silników krokowych to:
Silniki o zmiennej reluktancji
Silniki z magnesem trwałym
Silniki hybrydowe
Najbardziej ogólny podział silników krokowych dotyczy podziału ze względu na rodzaj ruchu na silniki wirujące i liniowe
Silnik o zmiennej reluktancji
Ten typ silnika był przez długi czas bardzo popularny. Jest on chyba najprostszy ze strukturalnego punktu widzenia.
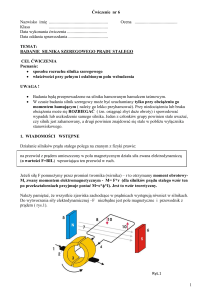
Silnik taki składa się z rotora o wielu zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane prądem stałym, bieguny namagnesowują się. Ruch pojawia
się na skutek przyciągania zębów rotora przez zasilane bieguny stojana.
Oprócz szeroko stosowanych jednosegmentowych silników krokowych często bywają stosowane silniki wielosegmentowe. Wśród jednosegmentowych silników krokowych o wirniku
reluktancyjnym rozróżnić można takie, w których na jeden biegun stojana przypada jeden ząb wirnika i takie, w których na jeden biegun stojana przypada kilka zębów wirnika. Obydwie odmiany
mogą być wykonana w wariancie symetrycznym bądź niesymetrycznym. W budowie symetrycznej uzwojenia dwóch przeciwległych biegunów tworzą pasmo natomiast budowa niesymetryczna
charakteryzuje się tym, że całe uzwojenie jednego pasma jest umieszczone na jednym biegunie. Działanie silnika skokowego o wirniku reluktancyjnym opiera się na wykorzystaniu momentu
reluktancyjnego. Silnik ten składa się z rotora o wielu zębach wykonanego z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane stałym prądem, bieguny namagnesowują się.
Ruch pojawia się na skutek przyciągania zębów rotora przez zasilane bieguny stojana. Zasadę działania przedstawia poniższy rysunek .
Strumień w obwodzie magnetycznym opisany jest wzorem
f=Iz / R m
i jest funkcją przepływu Iz oraz reluktancji magnetycznego wykazują linie pola dążenie do zamknięcia w obwodzie o najmniejszej reluktancji. W ten sposób powstaje moment obrotowy, który
dąży do ustawienia wirnika w położeniu q = 0.
Prądnice tachometryczne
Prądnice tachometryczne generują napięcie proporcjonalne do prędkości obrotowej. Prądnica tachometryczna prądu stałego to mała prądnica prądu stałego ze wzbudzeniem obcym, lub ze
wzbudzeniem magnesem stałym. Napięcie wyjściowe takiej prądnicy dane jest wzorem:
Gdzie φwzb – strumień wzbudzenia, ω – prędkość obrotowa wirnika, Rt – opór twornika, Rpsz-opór przejścia szczotek, Robc – opór obciążenia.
Ze wzorru wynika że największe nachylenie charakterystyki wyjściowej uzyskuje się dla nieskończenie dużego Robc. Nachylenia te są rzędu 0,005 - ! V/rpm. Minimalne Rpsz uzyskuje się przy
zastosowaniu szczotek miedzianych. Szczotki muszą być ustawione w strefie neutralnej, w przeciwnym razie pojawi się tzw. asymetria napięciowa która sprawie, że nachylenie charakterystyki
wyjściowej dla dodatnich i ujemnych prędkości wirowania nie jest identyczne. Zjawisko to jest związane z oddziaływaniem twornika i może występować przy Robc < ∞. Zmiana temperatury
zmienia rezystancję wzbudzenia, co prowadzi do zmiany prądu i strumienia wzbudzenia. Zmienia się więc nachylenie charakterystyki. Zmiany te ulegają ograniczeniu, jeśli prąd wzbudzenia jest
na tyle wielki, że magnetowód jest w stanie nasycenia. Wtedy zależność φw od prądu wzbudzenia jest prawie równa zero. W przypadku wzbudzenia magnesami trwałymi, φw nie zależy od
temperatury.
Wadą prądnicy tachometrycznej prądu stałego jest pulsowanie napięcia wyjściowego wynikająca ze skończonej liczby działek komutatora.
Prądnica tachometryczna indukcyjna – na stojanie jest uzwojenie wzbudzenia zasilane prądem zmiennym o częstotliwości w granicach 400-500 Hz. Uzwojenia wyjściowe stojana dostarcza
napięcia Uwy, o amplitudzie zależnej od prędkości wirnika zwartego lub w postaci aluminiowego kubka.
Działanie prądnicy. Zmienny prąd wzbudzenia Iw indukuje prądy we wirniku. Ich kierunki dla dIw/dt>0 zaznaczonego wewnątrz wirnika. Strumień od tych prądów, podobnie jak od prądu Iw,
nie koliduje z uzwojeniem wyjściowym. Zatem przy ω=0 sem indukowana na wyjściu jest równa zeru. Jeżeli jednak np. ω>0 to we wirniku powstają także prądy od sem rotacji, o kierunkach
zaznaczonych na zewnątrz wirnika. Strumień od tych prądów indukuje w uzwojeniu wyjściowym sem (o pulsacji Ω) zależną od ilorazu v=ω/Ω. Dla małych v zależność amplitudy sem od ω jest
prawie liniowa, zatem może być wykorzystywana do pomiaru prędkości kątowej.
Mostek tachometryczny prądu stałego – za jego pomocą możemy mierzyć sem silnika wykonawczego prądu stałego, która, przy stałym strumieniu wzbudzenia, jest miarą prędkością obrotowej
wirnika.
Parametry mostka dobiera się tak, aby przy ω=0 napięcie Uwy=0. Zatem zachodzi jak dla mostka Wheatstonea – R2·R3=Rt·R1 lub R3/Rt=R1/R2=h . Rozwiązując równania oczkowe:
e=k·ω
Mostek tachometryczny prądu przemiennego umożliwia sterowania prędkością dwufazowego silnika wykonawczego prądu przemiennego z jednoczesnym pozyskiwaniem informacji o aktualnej
prędkości obrotowej silnika.
P arametry elementów mostka R1, R2, Z3 dobieramy tak aby przy ω=0 napięcie Uwy było zerowe. Tak jest jeśli: R1/R2=Z3/Zs=h.
Okazuja się że napięcie wyjściowe można zapisać w postaci:
gdzie a,b,c,d są odpowiednimi współczynnikami zespolonymi. Dla spotykanych wartości parametrów silników wykonawczych współczynniki b oraz d są małe w porównaniu do a oraz c. Zatem
amplituda napięcia wyjściowego jest w przybliżenie proporcjonalna do prędkości obrotowej wirnika od napięcia sterowania Us.\
Transformatory położenia kątowego
Transformatory położenia kątowego dostarczają napięcia odwzorowującego aktualny kąt obrotu (położenia) wirnika. Stojan, jak i wirnik zawierają po dwa jednakowe uzwojenia, których osie
są prostopadłe względem siebie. Magnetowód i rozkład uzwojeń muszą być tak dobrane, aby indukcyjności stojan wirnik zawierają tylko jedną podstawową harmonikę.
Transformator położenia kątowego sinusowo-kosinusowy.
Uzwojenia stojana d zasilane jest prade przemiennym. Uzwojenie stojana q jest zwarte (poprzez rezystancję). Zwarte (poprzez impedancje) są też uzwojenia wirnika, do których dostęp jest albo
za pośrednictwem pierścieni ślizgowych, albo przewodów giętych. Jeżeli przyjąć, że prędkość kątowa przekręcania się wirnika w nowe położenie jest mała w porównaniu do pulsacji napięcia
zasilania Ud, to indukowane w uzwojeniach sem rotacji można pominąć. Pozostają tylko sem transformacji zależne od aktualnych sprężeń, zależnych z kolei od aktualnego kąta φ wirnika. W
takiej sytuacji, do opisu matematycznego można się posłużyć metodą symboliczną sprowadzającą się do równań symbolicznych. Można obliczyć fazor napięcie wyjściowego:
gdzie:
UD- fazor napięcia wejściowego, Za-Zq – sumy odpowiednich impedancje, X – amplituda reaktancji wzajemnej stojana i wirnika, k – stosunek liczby zwojów wirnika do liczby zwojów stojana.
Jeśli spełniony jest tzw. warunek kompensacji pierwotnej Zd=Zq lub wtórnej Za=Zb, to w mianowniku wyrażenia znika zależność od sin2φ. Zatem amplituda napięcia wyjściowego Ua wy przy
ustalonym napięciu Ud jest proporcjonalny do cosφ. W taki sam sposób obliczone napięcie wyjściowe Ub wy jest proporcjonalne do sinφ.
Transformator położenia kątowego liniowego z kompensacją pierwotną.
Transformator ma w tym układzie dostarczać sygnał wyjściowy o amplitudzie wprost proporcjonalnej wprost do kąta φ. Funkcja f(α)=sinα/(1+m·cosα) dla m=0,5361 jest w przedziale (-60,60 st)
liniowa z błędem nie przekraczającym jednego promila.
Transformator położenia kątowego-przesuwnika fazowego w wersji z dwoma napięciami zasilającymi przesuniętymi w fazie o 90 sopnit, w wersji b z jednym napięciem zasilającym.
Dla wersji b
amplituda stała a jego faza jest funkcją liniowa kąta φ.
Widać, że napięcie wyjściowe ma stałą amplitudę, zaś faza zależy liniowo od kąta wirnika φ.
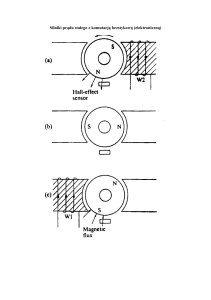
Transformator położenia kątowego – mikrosyna. Można go stosować gdy potrzebne jest odwzorowanie niewielkich kątów obrotu. Uzwojenie wejściowe jest zasilane prądem przemiennym Iwe.
Działanie transformatora. Jeśli wirnik jest jak w położeniu na rysunku, to strumienie we wszystkich czterech biegunach są takie same. Zatem sem indukowane w uzwojeniu wyjściowym na
biegunach pionowych znoszą się z sem indukowanymi na biegunach poziomych, ze względu na przeciwsobne połączone. Jeśli teraz wirnik wychyli się w kierunku φ, to wielkie zęby wirnika będą
bardziej pokrywać bieguny pionowe niż poziome. Zatem sem indukowane w uzwojeniu na biegunach pionowych będą większe niż na biegunach poziomych. Różnica ta jest tym większa, im
większa jest różnica pokryć obu biegunów pionowych i poziomych przez wielkie zęby wirnika. W sumie amplituda napięcia indukowanego w uzwojeniu wyjściowym zależy od φ w sposób liniowy
dla niewielkich wartości kąta.
Plik z chomika:
JareckiKrk
Inne pliki z tego folderu:
2kolokwium.docx (5292 KB)
IMG_0493 1.JPG (974 KB)
IMG_0495 1.JPG (1033 KB)
IMG_0494 1.JPG (1007 KB)
K!_b.jpg (870 KB)
Inne foldery tego chomika:
Zgłoś jeśli naruszono regulamin
Strona główna
Aktualności
Kontakt
Dla Mediów
Dział Pomocy
Opinie
Program partnerski
Regulamin serwisu
Polityka prywatności
Ochrona praw autorskich
Platforma wydawców
EA1
instrukcje do ćwiczeń
sprawozdania rozne
Copyright © 2012 Chomikuj.pl