Silniki prądu przemiennego
Podział maszyn prądu przemiennego
Asynchroniczne
indukcyjne
komutatorowe jedno- i wielofazowe
synchroniczne
ze wzbudzeniem
reluktancyjne
histerezowe
Silniki indukcyjne
uzwojenie pierwotne połączone z siecią zasilającą (zwykle
stojan) – poszczególne fazy umieszczone w żłobkach
uzwojenie wtórne zwarte podczas pracy
uzwojenia fazowe i rdzeń stojana indukują wirujące pole
magnetyczne; prędkość wirowania n0 zależy od częstotliwości
napięcia zasilającego f oraz liczby par biegunów uzwojenia p
n0
Dla f = 50Hz:
p
N0[obr/min]
1
3000
60 f
p
2
1500
3
1000
4
750
6
500
Pole magnetyczne przy
zasilaniu sinusoidalnym
1 faza – zmienne pole
magnetyczne
2 fazy – 2 pola
przesunięte o 120
(pole niesymetryczne)
Wirujące pole magnetyczne
3 fazy – pola wszystkich faz (przesunięte co 120 ) tworzą
symetryczne wirujące pole magnetyczne
Amplituda pola 1,5 razy większa od amplitudy jednej ze
składowych
Uzwojenia silników
indukcyjnych
maszyny trójfazowe – 3 pasma uzwojenia pierwotnego
(gwiazda lub trójkąt)
maszyny jednofazowe (do kilku kW) - układy uzwojeń (zwykle
dwufazowe) z przesunięciem fazowym prądu (zasilanie jednej
fazy uzwojenia przez kondensator lub dodatkowe uzwojenie
zwarte)
Wirnik klatkowy i
pierścieniowy
wirnik klatkowy (squirrel
cage rotor) – brak styków
mechanicznych
wirnik pierścieniowy –
uzwojenia prowadzone w
podłużnych żłobkach,
zwarte lub wyprowadzone
przez pierścienie ślizgowe
Wirnik klatkowy i
pierścieniowy
Strumień magnetyczny przecina pręt klatki wirnika.
Wywołuje to przepływ prądu wzbudzenia Iw w klatce
wirnika, co spowoduje powstanie siły F
Indukcja magnetyczna w prętach
klatki
Następny biegun ma przeciwną polaryzację, powoduje to zmianę
kierunku przepływu prądu. Ponieważ kierunek pola magnetycznego
także się zmienia, kierunek działania siły F nie ulega zmianie.
Siła elektromotoryczna w uzwojeniach wirnika powstaje gdy wirnik
obraca się z prędkością inną niż prędkość wirowania pola
magnetycznego (poślizg 2-4% przy obciążeniu znamionowym, bez
obciążenia <1%).
Sterowanie
Zmiana szybkości obrotowej silnika:
zmiana liczby par biegunów (silniki dwubiegowe)
zmiana częstotliwości (dla zachowania momentu napędowego
należy też zmieniać napięcie zasilania)
zmiana poślizgu
zmiana napięcia na stojanie (moment zmienia się
proporcjonalnie do kwadratu napięcia)
regulacja wirnika – włączenie rezystorów do uzwojeń
rozruch silnika dużej mocy – przełączanie gwiazda-trójkąt
(zmniejszanie obciążenia sieci przy rozruchu)
wirniki dwuklatkowe i głebokożłobkowe – zjawisko
wypierania prądu
Charakterystyki mechaniczne
Przy zmianie napięcia na stojanie
(softstart)
Przy zmianie rezystancji uzwojeń wirnika
Charakterystyki mechaniczne
Proporcjonalne zmiany napięcia i częstotliwości;
(namagnesowanie silnika zależy od ilorazu U/f)
Silniki synchroniczne
podobna zasada działania i budowa
trójfazowe uzwojenie stojana, wirujące pole magnetyczne
wirnik z nawiniętym uzwojeniem, zasilanym ze źródła prądu
stałego lub przemiennego
wirnik cylindryczny
wirnik z biegunami jawnymi (siły odśrodkowe!)
wirnik z magnesami trwałymi
Działanie silnika
synchronicznego
nieobciążony namagnesowany wirnik wiruje synchronicznie z
„osią” pola magnetycznego
siły w kierunkach promieniowych – zerowy moment obrotowy
przyłożony moment hamujący nieznacznie opóźnia wirnik
względem wirującego pola (w silnikach asynchronicznych
zwiększał poślizg) – powstaje moment mechaniczny
przeciwdziałający hamującemu
zbyt duży moment hamujący (kąt między polem a wirnikiem
powyżej 90 ) spowoduje wypadnięcie z synchronizmu i
zatrzymanie silnika
Sterowanie silnikiem
Silnik synchroniczny nie potrafi samoczynnie ruszać!
Możliwości rozruchu:
• dodatkowa maszyna
• zwieranie uzwojeń wirnika (rozruch jak asynchroniczny)
• przemiennik częstotliwości (falownik)
Silniki reluktancyjne
Silniki synchroniczne bez uzwojenia wirnika
Wirnik jest asymetryczny magnetycznie, dąży do
takiego położenia względem stojana, przy którym
reluktancja byłaby jak najmniejsza.
+ konstrukcja prostsza niż inne synchroniczne
+ niezawodność, niepotrzebna konserwacja
+ brak obwodu wzbudzenia
+ zastosowanie wirników klatkowych zwiększa
moment rozruchowy
- mniejszy moment siły – mała wydajność (w przemyśle
stosowane do 15kW)
- drgania i hałas spowodowane asymetrią wirnika
- stosunkowo duża moc bierna w obwodzie zasilania
Silniki reluktancyjne
Stosowane są głównie w napędach
wielozadaniowych, kiedy prędkość każdej osi musi
być dokładnie taka sama i gdzie użyty pojedynczy
silnik z napędem mechanicznym do poszczególnej
osi byłby trudny do realizacji lub zbyt kosztowny.
Silniki histerezowe
Wewnątrz stojana o wielofazowym uzwojeniu umieszcza się wirnik
wykonany z ferromagnetycznego tworzywa.
Wirnik ten zaczyna obracać się w kierunku działania pola
wirującego wytworzonego przez prąd przepływający w uzwojeniach
stojana.
Moment obrotowy wirnika będzie się składał z dwóch
składowych:
- momentu asynchronicznego powstającego na skutek
wzajemnego oddziaływania wirującego pola silnika i strumienia
wywołanego prądami wirowymi wirnika
- tzw. momentu histerezowego
Wynaleziony w roku 1900 przez Steinmetza był używany prawie
wyłącznie jako silnik pracujący praktycznie bez obciążenia
(napędy zegarów elektrycznych, przekaźników czasowych itp.).
Sprawność ich wynosiła 0,1 do 0,5%.
Obecnie przy mocach przekraczających nawet 500[W] uzyskuje się
sprawność ponad 50%.
Silniki histerezowe
− Samoczynny rozruch, łatwe wchodzenie w synchronizm,
− na skutek współdziałania momentów asynchronicznego i
histerezowego silniki pracują stabilnie również przy przeciążeniach,
przechodząc z charakterystyki synchronicznej na asynchroniczną,
− moment rozruchowy jest przeważnie większy od maksymalnego,
dzięki czemu silnik charakteryzuje się bardzo korzystną
elektromechaniczną stałą czasową,
− prąd pobierany z sieci w czasie rozruchu, biegu jałowego i
obciążenia znamionowego zmienia się nieznacznie, co
pogarsza sprawność silników nieobciążonych, ale wpływa
korzystnie na stałą czasową i na system zasilający,
− silnik ten nie ma żadnych styków ruchomych
− przy mocy mniejszej od 150 [W] i podwyższonych
częstotliwościach zasilania do wartości 400 [Hz] stosunek ciężaru
do mocy jest korzystniejszy niż w innych typach
silników o stałej prędkości obrotowej,
− na skutek dużego prądu magnesującego współczynnik mocy
jest mały i wynosi od 0,2 do 0,6
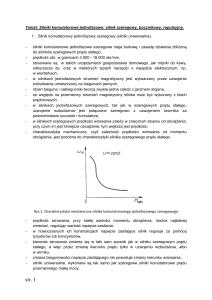
Silniki komutatorowe prądu
przemiennego
Maszyny komutatorowe prądu przemiennego umożliwiają:
• ekonomiczną i płynną regulację prędkości obrotowej w szerokich
granicach;
• dogodną regulację współczynnika mocy.
Powszechnie stosowane do napędu sprzętu gospodarstwa
domowego, elektronarzędzi i w trakcji elektrycznej.
Rodzaje silników
komutatorowych
jednofazowe
• silniki szeregowe (uniwersalne);
• silniki bocznikowe;
• silniki repulsyjne (silnik Thomsona i silnik Deriego).
trójfazowe
• silnik Schragego-Richtera;
• silniki trójfazowe bocznikowe;
• silniki trójfazowe szeregowe.
Silniki drogie, wymagające specjalistycznej obsługi
Silnik uniwersalny
Uzwojenie stojana połączone w szereg z uzwojeniem wirnika.
Zmiana kierunku prądu w tworniku następuje równocześnie ze
zmianą kierunku strumienia (połączenie szeregowe), a zatem
kierunek wirowania pozostaje stały
Silniki wysokoobrotowe, o dużym momencie rozruchowym
Regulacja prędkości przez włączenie szeregowego opornika.
Rozruch przez włączenie do sieci.
Niebezpieczeństwo rozbiegnięcia się przy pracy jałowej.
Silnik repulsyjny
Uzwojenie wirnika zwarte szczotkami.
Przy pewnym położeniu szczotek moment jest równy
zeru.
Maksymalny moment obrotowy przy kącie = 80 .
Rozruch, regulacja prędkości, zmiana kierunku
wirowania sterowana przesunięciem szczotek (silnik
wiruje w kierunku przeciwnym do przesunięcia
szczotek).
Mechanicznie podobny do silnika szeregowego prądu
stałego.
• znaczny moment rozruchowy,
• zależność prędkości od obciążenia,
• możliwość rozbiegania się,
• łatwy i łagodny rozruch oraz regulacja prędkości w
granicach 30+120% obrotów synchronicznych,
• znaczny koszt
Silnik trójfazowy szeregowy
Uzwojenia stojana i wirnika połączone w szereg przez szczotki komutatora (przy
dużych mocach przez transformator).
Wirnik jak w maszynie prądu stałego.
Trzy zespoły szczotek, odpowiednio dla każdej pary biegunów. Zespolony wspólny
układ szczotek może być przesuwany po obwodzie komutatora.
Moment obrotowy:
M CΦ Φ sinα
st
wirn
Tendencja do rozbiegania się przy małym obciążeniu
(redukcja przez obniżanie napięcia).
Rozruch przez podłączenie do sieci przy biegu jałowym
( = 0) oraz przesunięcie szczotek.
Zmiana kierunku przez zamianę dwóch dowolnych
przewodów zasilania i przesunięcie szczotek w
odwrotnym kierunku).
Wykorzystywane w układach napędowych o dużym
początkowym momencie rozruchowym
Silnik trójfazowy bocznikowy
Silnik zasilany od strony stojana:
Stojan wykonany jak w silniku indukcyjnym trójfazowym (uzwojenie w
żłobkach).
Wirnik jak w maszynie prądu stałego.
Układ trzech szczotek połączony z suwakiem transformatora.
Nastawianie prędkości obrotowej przez
zmianę napięcia na transformatorze lub
przesuwanie szczotek na komutatorze.
Moce silników nie przekraczają 150kW.
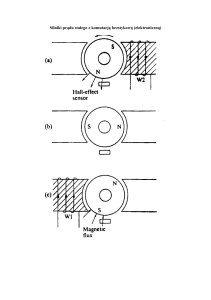
Silnik Schrage-Richtera
Silnik bocznikowy zasilany od strony wirnika:
Wirnik zasilany napięciem trójfazowym za pośrednictwem pierścieni ślizgowych.
(uzwojenie W1 w żłobkach wirnika, wytwarza wirujące pole magnetyczne).
Uzwojenie W2 połączone z działkami komutatora na wale maszyny.
Uzwojenie W3 w żłobkach rdzenia stojana – trzy symetrycznie rozmieszczone
części połączone ze szczotkami współpracującymi z komutatorem.
Pole wirujące W1 przecina pręty pozostałych
uzwojeń, indukując SEM.
To powoduje przepływ prądu przez W3
zamknięte komutatorem i W2 (indukowanie
pola magnetycznego jak w silniku
indukcyjnym).
Rozruch przez przesunięcie szczotek (przy
większej mocy konieczne zmniejszenie
napięcia).
Regulacja prędkości łatwa, przez przesuwanie
szczotek (50-140% prędkości synchronicznej)