
Silnik indukcyjny - historia
Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika
indukcyjnego.
Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku
1886.
Oba pierwsze silniki indukcyjne miały uzwojenia skupione, zasilane z sieci
dwufazowej.
Doliwo-Dobrowolski (1862-1919) - w roku 1889 zaproponował konstrukcję
silnika 3-fazowego pierścieniowego a później silnika klatkowego oraz 2klatkowego.
Obie konstrukcje były podobne do współczesnych konstrukcji maszyn
indukcyjnych.
Silnik indukcyjny
(klatkowy, asynchroniczny)
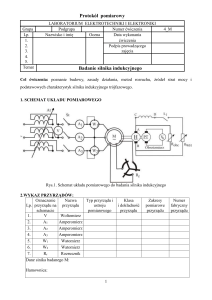
Budowa
stojan
wirnik
żłobki
Uzwojenie
stojana
Klatka
wirnika
Wirnik silnika indukcyjnego
Klatka
wirnika
Pole wirujące – uzwojenie trójfazowe stojana
Prądy w uzwojeniach
fazowych stojana
Pole wirujące
Pole wirujące
Prądy fazowe
Kierunki pola wirującego w kolejnych chwilach
Pole wirujące w stojanie silnika indukcyjnego
Pole wirujące przedstawione jak magnes wirujący
Siła działająca na pręty
klatki, powoduje ruch
wirnika
F i[l B]
e [ v B]l
siła elektromotoryczna
indukowana w prętach
klatki wirnika
Prądy indukowane w prętach klatki wirnika
Klatka wirnika w wirującym polu magnetycznym
Podstawowe wielkości
w0
2f
p
w0 w
s
;
w0
ns
60 f
p
w
n
30
w w 0 (1 s );
f 2 sf
ns, wo –prędkość synchroniczna w obr/min i w rad/s
s - poślizg, względna różnica prędkości pola w stojanie i prędkości wirnika
w – prędkość kątowa,
p – liczba par biegunów
f, f2 – częstotliwość w stojanie i wirniku
Schemat zastępczy silnika asynchronicznego
I0 – prąd magnesujący (prąd płynący przez reaktancję Xm
I1, I2 prądy stojana i wirnika,
R1, R2 rezystancje uzwojeń stojana i wirnika,
X1, X2 – reaktancje rozproszenia uzwojeń stojana i wirnika,
RFe – rezystancja odpowiadająca za straty w żelazie,
Xm – reaktancja główna, magnesowania
Charakterystyka mechaniczna SA
obliczona na podstawie schematu zastępczego
2M k
Me
s sk
sk s
R2
sk
;
Xz
( X w L)
X z X 1 X 2 ;
mU 2
Mk
;
2w0 X z
Mk
~
U2
;
2
f
Ważna zależność
Me – moment elektromagnetyczny silnika, Mk – moment maksymalny, krytyczny,
sk – poślizg przy momencie maksymalnym, U – napięcie zasilania fazowe
m – liczba faz , f- częstotliwość napięcia zasilającego
Charakterystyka mechaniczna M=f(n)
Stabilna część
w
charakterystyki
wo
generator
wn
silnik
w M
w M
-Mn
Mn
Moment znamionowy
Mk
Mr
Moment rozruchowy
M
Moment maksymalny,
Rodzaje pracy – silnik, generator, hamulec
Moce i sprawność
Moce i sprawność
Sprawność (z def.):
Straty w miedzi wirnika:
Moc mechaniczna:
Moment na wale silnika:
Pm
30 Pm
Tm
w
n
Regulacja prędkości silnika asynchronicznego
Dla silnika klatkowego
Tylko do rozruchu,
tzw. soft start
Regulacja prędkości silnika asynchronicznego
60 f
ns
;
p
2f
w0
p
w w 0 (1 s)
- zmiana liczby par biegunów,
- zmiana poślizgu (dla silnika pierścieniowego),
- zmiana częstotliwości napięcia zasilania
Liczba par biegunów
p=1
p=2
ns=60f/p, to dla f=50Hz,
ns=3000rpm
ns=1500rpm
Zmiana liczby par biegunów p – zmiana sposobu połączenia uzwojeń
60 f
ns
;
p
2f
w0
p
dla p=1 n1=3000rpm,
po przełączeniu uzwojenia na p=2 n2=1500rpm
p=2
p=1
Możliwa tylko skokowa zmiana prędkości synchronicznej !!!
Zmiana napięcia na stojanie – tzw. soft start
Urządzenie do realizacji to sterownik napięcia
U1
U2<U1
Mały zakres regulacji prędkości
Ze względu na mały zakres regulacji metoda nie jest stosowana do
regulacji prędkości silników klatkowych. Stosowana w przemyśle
do rozruchu silnika asynchronicznego
Zmiana częstotliwości zasilania, f=var.
-możliwa ciągła zmiana częstotliwości zasilania i prędkości
maszyny,
- konieczna jednoczesna zmiana napięcia
- umożliwia płynny rozruch maszyny z kontrolą momentu
rozruchowego,
-urządzenie do realizacji: falownik
Rozruch silnika asynchronicznego
Celem stosowania układów rozruchowych jest ograniczenie dużego
prądu rozruchowego i ew. zwiększenie momentu rozruchowego (o
ile jest to możliwe)
Rozruch silnika asynchronicznego
bezpośredni, (duże prądy przy rozruchu, tylko silniki małej
mocy),
▪ rozruch gwiazda – trójkąt
▪ napięciowy, (napięcie stojana rośnie stopniowo w czasie
ograniczenie prądów rozruchowych), tzw. soft-start,
▪ częstotliwościowy
Rozruch bezpośredni silnika asynchronicznego
(bez układu regulacji, odpowiedź na skok wartości zadanej napięcia zasilania)
Duży i niekontrolowany prąd
przy rozruchu
Oscylacje
momentu
1
usa
-1
1
isa
-1
1
Yra
-1
Moment 1
-1
Prędkość 1
0
Czas [ms]
‘budowanie”
strumienia
250
500
750
Rozruch napięciowy
Urządzenie do realizacji to sterownik napięcia
Metoda stosowana do maszyny mało obciążonej albo do obciążenia o
charakterystyce wentylatorowej
Rozruch częstotliwościowy
możliwy płynny rozruch przez ciągłą zmianę częstotliwości (i napięcia)
zasilającego. Prąd rozruchowy jest ograniczony, kontrolowany, także
przy maszynie obciążonej. Silnik jest zasilany z falownika
Rozruch silnika asynchronicznego – gwiazda/ trójkąt
W pierwszej fazie rozruchu uzwojenia są połączone w gwiazdę a
następnie w trójkąt
+ zmniejszenie prądów rozruchowych,
- oraz momentu rozruchowego ,
-stosowane do rozruchu maszyny mało
obciążonej
Metody hamowania silnika asynchronicznego
-Przeciwprądem/przeciwwłączeniem (maszyna pierścieniowa),
-Jednofazowe (maszyna pierścieniowa)
-Dynamiczne
-Generatorowe, odzyskowe
Metody hamowania silnika klatkowego zasilanego z falownika
w
wo
D
A
Ut, f
B
C
-Mn
E
Mn
wo
- Dynamiczne A, D, E
- Generatorowe, odzyskowe A, B, C
M
FALOWNIKI PRZEMYSŁOWE
Falownik z prostownikiem diodowym
- Przekształtnik jednokierunkowy, transport energii tylko z sieci do
maszyny, w drugą stronę niemożliwy
- Podczas hamowania energia wytracana na dodatkowej rezystancji Rh i
w elementach układu
-Bez rezystora hamującego ograniczona dynamika napędu
Falownik uniwersalny, dwukierunkowy
- Przekształtnik dwukierunkowy umożliwiający transport energii w obu
kierunkach: z sieci do maszyny i odwrotnie
-Możliwy zwrot energii do sieci, czyli możliwa praca generatorowa maszyny
i tzw. hamowanie odzyskowe
-Układ sterowania kontroluje prąd hamowania
-Dynamika napędu ograniczona tylko elementami i możliwościami odbioru
energii przez źródło
Kształtowanie napięcia wyjściowego metodą MSI
(Modulacji Szerokości Impulsów, ang. PWM)
Falownik z prostownikiem diodowym a dwukierunkowy
Prąd sieciowy
Uniwersalne, dwukierunkowe falowniki napięcia
a)
Przebiegi prądu i napięcia fazowego sieci
b)
Napięcie przewodowe i prąd fazowy silnika
Tabliczka znamionowa silnika asynchronicznego
Stopień ochrony
Dane z tabliczki znamionowej









![T[ms] - ETI PG](http://s1.studylibpl.com/store/data/000981699_1-af2b03261cda5b808e2da237a492daef-300x300.png)