STEROWANIE WG. ZASADY
U/f = const
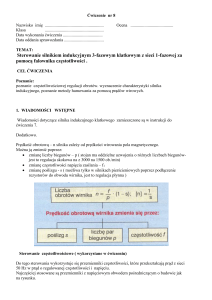
Rozruch bezpośredni silnika asynchronicznego
(bez układu regulacji, odpowiedź na skok wartości zadanej napięcia zasilania)
Duży i niekontrolowany prąd
przy rozruchu
Oscylacje
momentu
1
usa
-1
1
isa
-1
1
Yra
-1
Moment 1
-1
Prędkość 1
0
Czas [ms]
‘budowanie”
strumienia
250
500
750
Obciążenie momentem silnika asynchronicznego
(bez układu regulacji, odpowiedź na skok wartości momentu obciążenia)
1
us a
-1
1
is a
yr
-1
1
a
-1
Moment
1
-1
0, 8
0, 7
Czas [ms]
250
500
750
Spadek prędkości przy obciążeniu,
uchyb ustalony
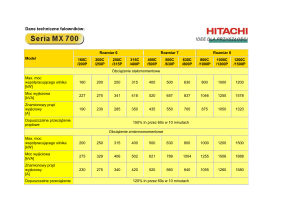
Schemat zastępczy
Us
Es
U s Es
Es
2 fψ s
ψ s ψ m ψ s
ZALEŻNOŚCI DLA STANU USTALONEGO
u s 2y s f
Dla Rs = 0
1. W stanie ustalonym (przy założeniu Rs=0) strumień stojana jest proporcjonalny
do ilorazu napięcia stojana i częstotliwości tego napięcia,
2. Aby utrzymać stały strumień w maszynie, przy zmianie
częstotliwości f należy jednocześnie zmieniać napięcie zasilania,
U
M k ~
f
2M k
Me
s sk
sk
s
sk
R2
;
Xz
X z X1 X 2 ;
mU 2
Mk
;
20 X z
( X L)
U
Ys ~
f
2
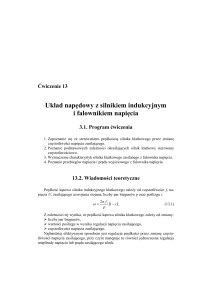
Charakterystyka sterowania U/f=const.
U/f=const. zachowane w zakresie od 0 do fn,
dla f>fn U=const., co skutkuje obniżeniem strumienia i momentu
maksymalnego w maszynie
Uproszczona struktura sterowania U/f
Otwarty układ
sterowania !
U
+Df
f
Charakterystyki mechaniczne przy
sterowaniu U/f=const. Zmniejszenie
momentu maksymalnego przy
małych częstotliwościach f i
napięciach U z powodu spadku
napięcia na rezystancji Rs
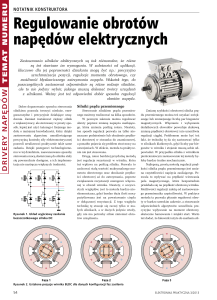
Charakterystyki sterowania dokładne
(z uwzględnieniem Rs)
Charakterystyk wskazują jak powinno zmieniać się napięcie stojana przy
zmianie częstotliwości dla zachowania stałego strumienia, szczególnie przy
małych częstotliwościach napięcia zasilającego
1
us
isy =1
isy =0,6
isy =0,4
isy – składowa czynna prądu stojana
isy =0,2
isy =0
0
0,2
0,4
0,6
0,8
fs
Charakterystyka U/f z korekcją spadku napięcia na rezystancji
Charakterystyka sterowania implementowana w układzie regulacji
(uproszczona w stosunku do charakterystyki dokładnej)
Charakterystyki silnika klatkowego przy sterowaniu U/f
z korekcją spadku napięcia na Rs
Struktura sterowania U/f z kompensacją poślizgu
(jest to opcja dostępna w wielu falownikach przemysłowych, ang.
slip compensation)
Kompensacja
poślizgu
(opcja)
U
+Df
f
Kompensacja poślizgu polega na zwiększaniu częstotliwości napięcia
silnika asynchronicznego o wartość Df w miarę wzrostu obciążenia,
kompensując spadek prędkości spowodowany obciążeniem silnika
Charakterystyki silnika klatkowego przy zasilaniu ze
źródła o zmiennej częstotliwości i napięciu (korekcja napięcia
po uwzględnieniu Rs i z kompensacją poślizgu)
Sterowanie
U/f
Sterowanie U/f z
kompensacją
poślizgu
Zasada działania układu kompensacji poślizgu
W wyniku zastosowania układu kompensacji następuje
usztywnienie charakterystyk mechanicznych
Charakterystyka u/f dla pracy nawrotnej
dwustrefowej
Charakterystyki mechaniczne silnika – w rzeczywistym
>o -zmniejszony
układzie regulacji
Zmniejszona obciążalność
przy chłodzeniu naturalnym
silnika
strumień, stała moc
Kontrola procesów przejściowych w układzie U/f
U, f
U
f
t
Do ograniczenia prądów i pulsacji momentu w stanach
przejściowych po zmianie wartości zadanej ogranicza się
szybkość zmian napięcia i częstotliwości
struktura sterowania U/f z tzw. rampą
Kompensacja
poślizgu
(opcja)
U
U, f
tf
+Df
Rozruch z tzw. rampą
Zmniejszenie prądu
rozruchowego
1
0
1
usa
-1
1
isa
-1
1
yra
-1
1
Moment
-1
Prędkość 1
0
Czas [ms]
Zmniejszenie
oscylacji momentu
Us
250
500
750
ROZRUCH PRZY U/F=CONST (wzrost tr)
tr
1
0
1
usa
-1
1
isa
-1
1
yra
-1
1
Moment
-1
Prędkość 1
0
Czas [ms]
Us
250
500
750
Obciążenie momentem silnika asynchronicznego
1
us a
-1
1
is a
yr
-1
1
a
-1
Moment
1
-1
0, 8
0, 7
Czas [ms]
250
500
750
Układ U/f z rampą i bez rampy nie wpływa na
procesy przejściowe po zmianie obciążenia
Sterowanie U/f - podsumowanie
-Otwarty układ regulacji,
-Maszyna pracuje na charakterystykach naturalnych,
-Sterowanie prędkością przez zmianę częstotliwości i napięcia zgodnie z
charakterystyką sterowania
-Sterowanie prędkością z dokładnością wynikającą z poślizgu,
-Brak układu regulacji i kontroli prądu,
-Wpływ na stan przejściowy przez tzw. rampę
-Właściwości dynamiczne układu - ograniczone
-Możliwa poprawa dokładności przez zastosowanie układu kompensacji wpływu
obciążenia, kompensacji poślizgu