Marcin MORAWIEC, Zbigniew KRZEMIŃSKI, Arkadiusz LEWICKI
Politechnika Gdańska, Katedra Automatyki Napędu Elektrycznego
Sterowanie silnikiem o magnesach trwałych PMSM z obserwatorem
prędkości kątowej wirnika
Streszczenie. W referacie przedstawiono nowy sposób sterowania silnikiem PMSM oparty na sterowaniu multiskalarnym. Do sterowania nie jest
potrzebne określenie położenia wirnika. W nowym obserwatorze prędkości opartym na obserwatorze Luenbergera estymowana jest prędkość
kątowa wirnika oraz strumienie. Rozważania teoretyczne zweryfikowano badaniami symulacyjnymi.
Abstract. The new approach to the control of PMSM based on multiscalar control is presented in this paper. Modified Luenberger observer structure
of PMSM is presented. Properties of the new control systems are compared and results of simulations are showed. (The Control system of PMSM
with the speed observer).
Keywords: Control of PMSM, multiscalar control, voltage source inverter, current source inverter.
Słowa kluczowe: sterowanie silnikiem PMSM, sterowanie multiskalarne, falownik napięcia, falownik prądu.
Wstęp
Rozwój energoelektroniki, technik mikroprocesorowych
oraz metod sterowania w XX wieku wpłynął na konstrukcje
układów
napędowych,
które
są
wyposażone
w przekształtnik
energoelektroniczny.
W
układach
napędowych najczęściej stosowane są silniki klatkowe ze
względu na niską cenę i dużą trwałość w porównaniu
z silnikami prądu stałego z komutatorem mechanicznym.
Obecnie z silnikami indukcyjnymi mogą konkurować silniki
synchroniczne o magnesach trwałych, głównie w zakresie
małych mocy silników. Zaletami silnika o magnesach
trwałych są m.in. [1]: duży stosunek momentu
maksymalnego do momentu bezwładności wirnika, duży
zakres regulacji prędkości obrotowej, korzystny stosunek
momentu do masy, małe wymiary silnika.
W układach napędowych stosowane są przekształtniki
prądu lub napięcia. Falowniki prądu były rzadziej stosowane
niż napięcia ze względu na gorsze właściwości dynamiczne
i statyczne układu napędowego. W układach napędowych
z silnikami o magnesach trwałych PMSM (z ang.
Permanent Magnet Synchronous Motor) falowników prądu
praktycznie nie stosowano. Obecnie wykorzystanie falownika prądu do zasilania silnika PMSM może być lepszym rozwiązaniem niż w przypadku falownika napięcia. Zastosowanie tranzystorowego falownika prądu poprawia właściwości statyczne układu napędowego z silnikiem PMSM
(sinusoidalne napięcie i prąd stojana silnika) oraz zmniejsza
rozmiary, wagę i koszt przekształtnika energoelektronicznego (niewielki dławik w obwodzie pośredniczą-cym oraz
kondensatory na wyjściu, brak połączeń typu bus-bar).
W kolejnych rozdziałach zostaną przedstawione
podstawowe strategie sterowania oraz sterowanie
multiskalarne z obserwatorem prędkości dla silnika PMSM
zasilanego z falownika napięcia i prądu. Rozważania
teoretyczne zweryfikowano badaniami symulacyjnymi.
Model matematyczny układu napędowego z PMSM
Model matematyczny silnika z magnesami trwałymi ma
postać [1]:
(1)
(2)
(3)
(4)
G
G dψ s
G
G
us = Rs is +
+ jωkψ s ,
dt
G G
G
ψ s = Ls is + ψ f ,
d ωr 1
= (me − m0 )
dt
J
dθ
= ωr ,
dt
gdzie: ωk – prędkość kątowa wirowania układów
współrzędnych, ωr – prędkość kątowa wirnika, θ - położenie
kątowe wirnika względem układu odniesienia.
48
Model matematyczny silnika o magnesach trwałych
zapisany w układzie nieruchomym (xy) jest postaci:
(5)
(6)
disx
R
1
1
= − s isx + ex + usx ,
dt
Ls
Ls
Ls
disy
dt
=−
Rs
1
1
isy + e y + usy ,
Ls
Ls
Ls
d ωr 1
1
= (ψ sx isy −ψ sy isx ) − m0 ,
dt
J
J
gdzie: ex, ey – siła elektromotoryczna maszyny.
Dla układu napędowego z falownikiem prądu należy zapisać równania dla obwodu pośredniczącego oraz na konsensatory wyjściowe. Dla układu współrzędnych związanego
z nieruchomym stojanem (xy) równania te mają postać [2]:
di
(8)
ed = id Ld + Ld d + ud ,
dt
ducx
1
(9)
=
(i fx − isx ),
dt
CM
(7)
(10)
(11)
ducy
dt
=
1
(i fy − isy ),
CM
usx = ucx + Rc (i fx − isx ),
usy = ucy + Rc (i fy − isy ),
gdzie: ed – napięcie na wejściu obwodu pośredniczącego,
ud – napięcie na wejściu mostka tranzystorowego, id – prąd
w obwodzie pośredniczącym, ifx,y – prąd zmodulowany na
wyjściu mostka tranzystorowego, CM – kondensatory na
wyjściu, Rc – rezystancja włączona w szereg z
kondensatorem CM, isx,y składowe wektora prądu stojana.
Strategie sterowania silnikiem PMSM
W literaturze, m.in. [1], rozważane są cztery strategie
sterowania silnikiem o magnesach trwałych:
♦ zachowanie stałego kąta mocy δ = π/2,
♦ zachowanie stałego współczynnika mocy,
♦ zachowanie stałej amplitudy strumienia skojarzonego
stojana,
♦ maksymalizację stosunku momentu elektromagnetycznego do amplitudy prądu stojana,
W niniejszym referacie przedstawiono sterowanie oparte
na strategii sterowania z zachowaniem stałego kąta mocy δ
= π/2. W strategii tej moment elektromagnetyczny zależy
liniowo od amplitudy prądu stojana natomiast brak jest
kontroli nad strumieniem skojarzonym stojana, który może
wzrastać proporcjonalnie do amplitudy prądu stojana.
W literaturze m.in. [1] układ regulacji silnika PMSM oparty
na strategii sterowania δ = π/2 nazwany jest sterowaniem
prądem stojana.
PRZEGLĄD ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 85 NR 8/2009
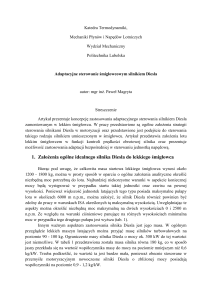
Sterowanie silnikiem PMSM zasilanym z falownika
napięcia
Schemat blokowy układu z podporządkowanymi
regulatorami
składowych
wektora
prądu
stojana
przedstawiono na rys. 1. Model matematyczny układu
regulacji zapisano w układzie zorientowanym zgodnie
z wirnikiem. Do transformacji z układu αβ/dq i odwrotnej
konieczna jest dostępność sygnału określającego kąt
położenia wirnika.
d-q
usq*
isq*
r*
θ
usd*
isd*
x-y
isd d-q
r
Falownik
napięcia
x-y
(22)
isx, isy
dx11 1
= ( x12 − m0 ) ,
dt
J
dx12 1
= ⋅ (− x12 + m1 ),
dt
Ti
♦ podsystem elektromagnetyczny
(24)
dx22 1
= ⋅ (− x22 + m2 ),
dt
Ti
gdzie: Ti jest stałą czasową silnika.
isq
θ
Zastosowanie sterowań (18) - (19) prowadzi do
dekompozycji modelu opisanego równaniami (5) - (7) na
dwa odsprzężone podsystemy:
♦ podsystem mechaniczny
(23)
usx*
usy*
gdzie: zmienna x21 oznacza kwadrat strumienia magnesów
trwałych x21 = ψ 2fx + ψ 2fy .
PMSM
s-1
Rys. 1. Schemat blokowy układu regulacji ze sterowaniem
wektorowym prądem stojana
Innym podejściem do sterowania silnikiem z magnesami
trwałymi może być sterowanie nieliniowe – multiskalarne
oparte na strategii sterowania z δ = π 2 .
Zmienne multiskalarne są następującej postaci:
x11 = ωr ,
(13)
x12 = isyψ fx − isαψ fy ,
(14)
x22 = iαψ f α + iβψ f β ,
Rys. 2. Schemat blokowy układu regulacji ze sterowaniem
multiskalarnym z zachowaniem strategii sterowania δ = π/2
Odsprzężenie
i transformacja
(18)-(21)
(12)
(15)
(16)
dx11 1
= ( x12 − m0 ) ,
dt
J
R
dx12
1
= − s x12 − x11 x22 + x11 x21 +
dt
Ls
Ls
+
(17)
Zmienne
multiskalarne
(12)-(14)
gdzie: x11 jest prędkością wirnika, x12 jest zmienną
proporcjonalną do momentu elektromagnetycznego, x22 jest
iloczynem skalarnym strumienia magnesów trwałych i prądu
stojana silnika. Pochodne zmiennych multiskalarnych mają
postać:
1
1
usyψ fx − usxψ fy ,
Ls
Ls
R
dx22
1
1
= − s x22 + x11 x12 + uβψ f β + uαψ f α .
dt
Ls
Ls
Ls
Kompensacja nieliniowych składników w (16) - (17)
przez zastosowanie przekształceń określonych w [3] oraz
oznaczenie nowych sterowań m1 i m2 prowadzi do
nieliniowych sterowań w postaci:
1
1
x11 x21 + m1 ,
Ls
Ti
(18)
u1 = x11 x22 −
(19)
u2 = − x11 x12 +
1
m2 .
Ti
Zmiennymi sterującymi falownik są zadane składowe
napięcia stojana silnika określone zależnościami:
(20)
usx* = Ls
(21)
usy* = Ls
u2ψ fx − u1ψ fy
x21
u2ψ fy + u1ψ fx
x21
,
,
Rys. 3. Schemat blokowy układu regulacji ze sterowaniem
multiskalarnym z zachowaniem stałej amplitudy strumienia stojana
Schemat blokowy układu regulacji ze sterowaniem
*
multiskalarnym przedstawiono na rys. 2. Zmienną x22
można wyliczać lub przyjąć wartość zero.
Zastosowanie sterowania multiskalarnego przedstawionego w [3] umożliwia wybór innej strategii sterowania np.
z zachowaniem stałej amplitudy strumienia stojana.
Schemat blokowy układu regulacji silnika PMSM jest takiej
samej postaci jak w przypadku sterowania silnikiem
indukcyjnym zasilanym z falownika napięcia.
Sterowanie silnikiem PMSM zasilanym z falownika
prądu
Najprostszą metodą sterowania silnikiem o magnesach
trwałych zasilanym z falownika prądu jest metoda
polegająca na ustawieniu wektora prądu wyjściowego
falownika if o δ = π 2 w stosunku do wektora strumienia
magnesów trwałych, który pokrywa się z osią „d” układu
współrzędnych związanych z wirnikiem rys. 4. Schemat
blokowy układu regulacji pokazano na rys. 5.
PRZEGLĄD ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 85 NR 8/2009
49
(33)
d ς 12 1
= (−ς 12 + m1 ),
dt
Ti
♦ podsystem elektromagnetyczny
G
if
δ =π 2
(34)
G
ψf
Rys. 4. Położenie wektorów strumienia magnesów trwałych
G
i wektora prądy wyjściowego falownika i f
d ς 22 1
= (−ς 22 + m2 ) .
dt
Ti
gdzie: Ti jest stałą czasową silnika.
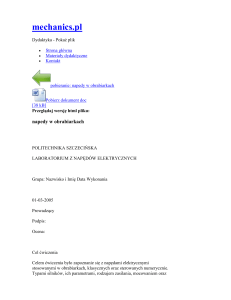
Schemat blokowy układu regulacji ze sterowaniem
multiskalarnym przedstawiono na rys. 6.
Rys. 5. Schemat blokowy układu regulacji z zachowaniem strategii
sterowania δ = π/2
Rys. 6. Schemat blokowy układu regulacji ze sterowaniem
multiskalarnym silnikiem zasilanym falownikiem prądu
Silnikiem z magnesami trwałymi zasilanym z falownika
prądu można również sterować metodą multiskalarną.
Zmienne multiskalarne określone są zgodnie z [2]:
Obserwator prędkości dla silnika PMSM
W [1] przedstawiono strukturę obserwatora prędkości
i położenia kątowego bazującą na strukturze obserwatora
Luenbergera. Model matematyczny obserwatora w układzie
nieruchomym (xy) przedstawionym w [1] można zmodyfikować zgodnie z [4] poprzez wprowadzenie nowych
członów korekcyjnych i tłumiących oscylacje zmiennych
stanu. Zmodyfikowany obserwator dla silnika o magnesach
trwałych ma postać następujących równań:
(26)
ς 11 = ωr ,
ς 12 = i f ψ fx ,
(27)
ς 22 = −i f ψ fy ,
(25)
gdzie: ς11 jest prędkością kątową wirnika, ς12 jest zmienną
proporcjonalną do momentu elektromagnetycznego, ς22 jest
iloczynem skalarnym strumienia od magnesów trwałych
i prądu płynącego w obwodzie pośredniczącym, if jest
prądem na wyjściu mostka tranzystorowego.
Postępując zgodnie z metodą wyznaczania sterowania
multiskalarnego przedstawioną w [3], otrzymuje się postać
nieliniowych sterowań v1 i v2:
(28)
R
1
1
v1 = c ψ fy isx − ucxψ fy + m1 ,
Ld
Ld
Ti
(29)
R
1
1
v2 = − c ψ fx isy + ucyψ fx + m2 .
Ld
Ld
Ti
Zmiennymi sterującymi w przypadku zasilania silnika
z falownika prądu są napięcie ed oraz pulsacja wektora
wyjściowego prądu ωi , określone zależnościami:
(30)
(31)
ed = − Ld
v2ψ fy − v1ψ fx
ς 21
v ψ + vψ
ωif = 2 fx 1 fy .
id ς 21
,
(32)
50
diˆsy
(36)
(37)
(38)
(39)
(40)
(41)
Zastosowanie sterowań (28) - (29) prowadzi do
dekompozycji modelu opisanego równaniami (5) - (11) na
dwa odsprzężone podsystemy:
♦ podsystem mechaniczny
d ς 11 1
= (ς 12 − m0 ) ,
dt
J
(35)
diˆsx
R
1
1
= − s iˆsx + ξˆy + usx + k1 (isx − iˆsx ) +
dτ
Ls
Ls
Ls
+ k2 ⋅ S ⋅ψˆ sx + k3 ⋅ V ⋅ Sψˆ sy ,
(42)
gdzie:
dτ
Rs ˆ
1
1
isy − ξˆx + usy + k1 (isy − iˆsy ) +
Ls
Ls
Ls
ˆ
+ k2 ⋅ S ⋅ψ sy − k3 ⋅ V ⋅ Sψˆ sx ,
=−
d ξˆx
= − k4 (isy − iˆsy ),
dτ
d ξˆy
= k4 (isx − iˆsx ),
dτ
deˆx
= −ξˆy + k2 (isx − iˆsx ) + k5 ⋅ S ⋅ψˆ sx + k6 ⋅ V ⋅ S ⋅ψˆ sy ,
dτ
deˆy
= ξˆx + k2 (isy − iˆsy ) + k5 ⋅ S ⋅ψˆ sx − k6 ⋅ V ⋅ S ⋅ψˆ sy ,
dτ
dθˆr
= ωˆ r ,
dτ
d ωˆ r _ sof
= k f (ωˆ r − ωˆ r _ sof ) ,
dτ
S = sign(ωˆ r )
oraz sygnał
V = ζ αψˆ r β − ζ βψˆ rα ,
k1...k6, kf nastawy obserwatora. Prędkość kątowa wirnika
wyznaczana jest ze wzoru:
PRZEGLĄD ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 85 NR 8/2009
ωˆ r =
(43)
ψˆ rxζ x + ψˆ ryζ y
.
ψˆ rx2 + ψˆ ry2
ω̂r _ f
Odtwarzana prędkość kątowa wirnika powinna być
filtrowana zgodnie z zależnością (42).
Wyniki symulacji układów napędowych z silnikiem
PMSM
W powyższych rozdziałach przedstawiono sterowanie
multiskalarne silnikiem o magnesach trwałych zasilanym
falownikiem napięcia i prądu. W zaproponowanych
algorytmach sterowania prędkość oraz strumień stojana
silnika jest odtwarzany w nowym obserwatorze prędkości.
Rys. 7. Przebiegi w układzie multiskalarnego sterowania silnikiem
PMSM zasilanym z falownika napięcia
1
ς11
-1
1
ς12
-1
1
ς21
-1
0.5
ς22
-0.5
1
id
0
1
ed
-1
Czas [ms] 0
100
200
300
400
500
Rys. 8. Przebiegi w ukladzie multiskalarnego sterowania silnikiem
PMSM zasilanym z falownika prądu
ω̂r _ f
ω̂r
1
0
1
0
1
0
-1
Czas [ms] 0
100
200
300
400
500
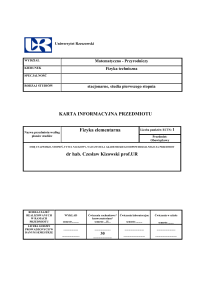
Rys. 9. Przebiegi: filtrowanej i odtwarzanej prędkość wirnika oraz
błędu prędkości przy symetrii obwodu magnetycznego silnika Ld =
Lq
Na rys. 7 i 8 przedstawiono przebiegi zmiennych
multiskalarnych dla silnika zasilanego falownikiem napięcia
(rys. 7) i falownikiem prądu (rys. 8), podczas rozruchu do
prędkości 1 [j.w.] i nawrotu od 1 do -1 [j.w.].
Na rys. 8 – 9 pokazano przebiegi filtrowanej
i odtwarzanej prędkości oraz błędu prędkości (zmierzonej
i odtwarzanej)
w
przypadku
symetrii
obwodu
magnetycznego silnika Ld = Lq (rys. 8) oraz niesymetrii Ld =
2Lq. Dla przypadku Ld = Lq błąd odtworzonej prędkości
wirnika w stanie ustalonym wynosi około 0,25% natomiast
w stanie przejściowym około 0,5%. Dla niesymetrii obwodu
magnetycznego błąd w stanie ustalonym wynosi około
0,5%, a w stanie przejściowym około 3%.
ω̂r
1
0
1
0
4
Czas [ms] 0
100
200
300
400
500
Rys. 10. Przebiegi: filtrowanej i odtwarzanej prędkość wirnika oraz
błędu prędkości przy niesymetrii obwodu magnetycznego silnika Ld
≠ Lq
przy czym Ld
= 2Lq
Podsumowanie
W referacie przedstawiono inne podejście do sterowania
silnikiem o magnesach trwałych oparte na sterowaniu
multiskalarnym.
Sterowanie
multiskalarne
było
zaadaptowane przede wszystkim do sterowania silnikiem
indukcyjnym oraz pierścieniowym zasilanym z falownika
napięcia. W przypadku sterowania maszyną o magnesach
trwałych sterowanie multiskalarne jest nową propozycją.
W literaturze jest niewiele publikacji na temat sterowania
silnikiem PMSM zasilanym falownikiem prądu. Związane
jest to przede wszystkim z brakiem na rynku tanich
modułów tranzystorowych z wsteczną blokadą (z ang.
reverse-blocking) na większą moc.
Przedstawione
w
referacie
układy
sterowania
multiskalarnego gwarantują dużą dynamikę silnika, brak
sprzężenia pomiędzy torami regulacji oraz niewielkie
przeregulowania w stanach przejściowych.
W przypadku sterowania silnikiem zasilanym z falownika
napięcia można zauważyć dużą dynamikę układu
napędowego. Silnik zasilany z falownika prądu cechuje
nieco mniejsza dynamika, która jest ograniczona
wydajnością napięciową źródła zasilania oraz parametrami
obwodu pośredniczącego.
Zaproponowany obserwator prędkości kątowej wirnika
odtwarza prędkość kątową oraz strumień stojana
z niewielkimi błędami w stanie ustalonym i przejściowym,
w przypadku symetrii i niesymetrii obwodu magnetycznego
silnika.
LITERATURA
[1] Z a w i r s k i
K., Sterowanie
silnikiem synchronicznym
o magnesach trwałych, Wydawnictwo Politechniki Poznańskiej,
Poznań 2005
[2] M o r a w i e c
M . , Bezczujnikowe sterowanie maszyną
indukcyjną zasilaną z falownika prądu, Rozprawa doktorska,
Politechnika Gdańska 2007
[3] Krzemiński
Z.,
Cyfrowe
sterowanie
maszynami
asynchronicznymi, Wydawnictwo Politechniki Gdańskiej 2001
[3] Krzemiński
Z.,
Cyfrowe
sterowanie
maszynami
asynchronicznymi, Wydawnictwo Politechniki Gdańskiej 2001
[ 4 ] K r z e m i ń s k i Z . , Struktura obserwatora prędkości silnika
indukcyjnego z modelem zakłóceń, MiS-4, 2006
Autorzy: prof. dr hab. inż. Zbigniew Krzemiński, Politechnika
Gdańska, Katedra Automatyki Napędu Elektrycznego, ul.
Sobieskiego 7, 80-216 Gdańsk, E-mail: [email protected];
dr inż. Marcin Morawiec, Politechnika Gdańska, Katedra
Automatyki Napędu Elektrycznego, ul. Sobieskiego 7, 80-216
Gdańsk, E-mail: [email protected];
dr inż. Arkadiusz Lewicki, Politechnika Gdańska, Katedra
Automatyki Napędu Elektrycznego, ul. Sobieskiego 7, 80-216
Gdańsk, E-mail: [email protected]
PRZEGLĄD ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 85 NR 8/2009
51