5. Regulacja częstotliwościowa prędkości obrotowej
silnika indukcyjnego klatkowego
5.1 Zasada regulacji częstotliwościowej - warunki optymalizacji statycznej;
5.2 Regulacja skalarna prędkości obrotowej ( U/f);
5.3 Regulacja wektorowa prędkości obrotowej
5.4 Odtwarzanie (estymacja)
wybranych zmiennych stanu silnika
indukcyjnego klatkowego;
5.5 Metoda bezpośredniego sterowania momentem i strumieniem (DTC);
5.5 Układy łagodnego rozruchu.
Związek napięcia z częstotliwością
Dla małych f ==> I≈U/R
Ψ=L/R*U ==> U=Ψ*R/L = k1
Dla duŜych f ==> I≈U/ωL
Ψ=U/ω ==> U=Ψ* ω = k2*f
Silnik Indukcyjny Klatkowy – Sterowanie
Skalarne
Opis matematyczny silnika indukcyjnego klatkowego
- równania napięciowe obwodu stojana i
wirnika
d
u sk = rs i sk + Ψ sk + jωk Ψ sk
dt
d
u rk = rr i rk + Ψ rk + j (ωk − ωm )Ψ rk
dt
- równania strumieniowo-prądowe
Ψ sk = Ls i sk + LM i rk
Ψ rk = Lr i rk + LM i sk
- równanie ruchu
dω m
1
[me − mo ]
=
dt
TM
- równanie momentu elektromagnetycznego
{
me = Im Ψ sk i sk
gdzie:
JΩ sN
TM =
,
pb M N
*
}
Ls = Lδs + LM ,
Lr = Lδr + LM .
Sterowanie skalarne rozwiązuje się na podstawie
charakterystyk statycznych wyraŜonych wzorami na
napięcie lub prąd stojana
Wzór na napięcie stojana u S
2
rS
r
* rR − ω R * δ * xS * xR + S * ω R * xR + rR * xS
ω
ωS
uS = ωS * S
2
2
2
2
2
2
rR ∗ xS + ω R * δ * xS * xR
gdzie:
xM2
δ = 1−
xS * xR
2
- całkowity współczynnik rozproszenia maszyny
Przebieg charakterystyki
uS = f ( fS )
dla
ΨS = 1
Charakterystyki silnika klatkowego przy zasilaniu ze
źródła o zmiennej częstotliwości i napięciu
Stały strumień
magnetyczny
w silniku
U/f = const oraz korekcja rezystancji wirnika
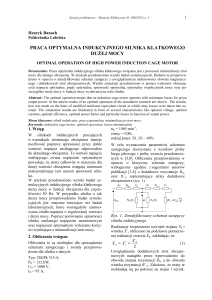
Falownik napięcia z rezystorem hamowania
Falownik napięcia ze zwrotem energii do sieci
- nawrotny układ tyrystorowy
Falownik napięcia ze zwrotem energii do sieci
- tranzystorowy mostek sieciowy
Modulacja szerokości impulsów
Struktura sterowania
u S = f (ω S , ω R ) w zamkniętym (włącznik w pozycji 1)
oraz otwartym (włącznik w pozycji 2) układzie regulacji prędkości
Schemat układu skalarnej regulacji prędkości silnika indukcyjnego
klatkowego wg zasady U/f = const. (bez regulacji prądu)
Wzór na prąd stojan i S
w funkcji pulsacji wirnika
1 +
1
*
iS =
xS
δ
1 +
xR
* ω R
rR
2
* xR
* ω R
rR
Przykładowe przebiegi charakterystyk i S = f
(ω R )
2
dla
ΨS = ΨR = 1
Metoda pośredniego sterowania strumienia silnika klatkowego z
uwzględnieniem prądu
Rozruch napędu z silnikiem indukcyjnym klatkowym z regulacją prędkości w
układzie zamkniętym, prędkość zadana ω zad = 148,7
Skokowa zmiana prędkości zadanej i momentu obciąŜenia
(skok prędkości następuje po upływie 1ms a skok obciąŜenia w chwili - 800 ms)
Rozruch napędu z silnikiem indukcyjnym klatkowym z regulacją prędkości w
układzie otwartym, prędkość zadana ω zad = 148,7
Skokowa zmiana prędkości zadanej i momentu obciąŜenia
(skok prędkości następuje po upływie 1ms a skok obciąŜenia w chwili - 800 ms)
Silnik Indukcyjny klatkowy – Sterowanie wektorowe
Wykres wektorowy zmiennych stanu silnika we współrzędnych polowych
isx = isα cos γ sΨ + isβ sin γ sΨ
isy = −isα sin γ sΨ + isβ cos γ sΨ
isx = isα cos γ sΨ + isβ sin γ sΨ
isy = −isα sin γ sΨ + isβ cos γ sΨ
me = c ⋅ Ψs ⋅ I s ⋅ sin δ = c ⋅ Ψs ⋅ isy
Struktura układu bezpośredniego sterowania polowo zorientowanego
Ilustracja skalarnej regulacji momentu silnika
(odpowiedź na skok wartości zadanej)
Ilustracja wektorowej regulacji momentu silnika
(odpowiedź na skok wartości zadanej)
Struktura układu bezpośredniego sterowania polowo zorientowanego przy
wymuszeniu prądowym z histerezowymi regulatorami prądu
Struktura pośredniego sterowania polowo zorientowanego - IFOC
Rozruch napędu z silnikiem indukcyjnym klatkowym z wektorową regulacją prędkości,
prędkość zadana ω zad = 148,7
Skokowa zmiana prędkości zadanej i momentu obciąŜenia
(skok prędkości następuje po upływie 1ms a skok obciąŜenia w chwili - 800 ms)
Porównanie dynamiki metod skalarnej
i wektorowej
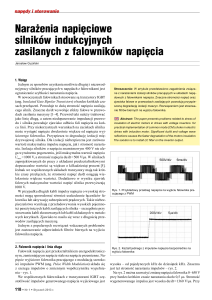
Napięcie wyjściowe falownika
Wektorowa reprezentacja napięcia wyjściowego falownika: a) uproszczony
schemat falownika zasilającego silnik, b) połoŜenie wektorów napięcia
ruch do przodu – wektor aktywny kolejności
zgodnej
q
zatrzymanie- wektor zerowy
+Hm
m~ψsq
ruch do tyłu – wektor aktywny kolejności
przeciwnej
ψs
-Hm
ruch ciągły
δψ
ψr
d
α
stojan
Rys. Ruch wektora strumienia stojana względem strumienia wirnika pod wpływem wektorów
i zerowych napięcia falownika.[2]
aktywnych
β
γs(2)
γs(3)
u3
u1
u4
u6
ψs
γs(1)
ψr
α
γs(4)
2Hψ
γs(5)
γs(6)
Rys. Wybór wektora napięcia wyjściowego falownika w zaleŜności od połoŜenia
strumienia stojana
mz
-
Sa
ua
+
m
wybór
wektora
napięcia
falownika
ψsz
+
Sb
Sc
Falownik
niezaleŜny
napięcia MSI
ub
uc
silnik
indukcyjny
klatkowy
ψs
-
Rys. Uproszczony schemat bezpośredniego sterowania momentu i strumienia silnika klatkowego
Układ bezpośredniego sterowania momentu i strumienia (DTC) silnika
klatkowego zasilanego z falownika napięcia
Tabela selekcji wektora napięcia wyjściowego falownika
dψ
1
0
dm
γ s(1)
γ s(2)
γ s(3)
γ s(4)
γ s(5)
γ s(6)
1
u2
u3
u4
u5
u6
u1
0
u0
u7
u0
u7
u0
u7
-1
u6
u1
u2
u3
u4
u5
1
u3
u4
u5
u6
u1
u2
0
u7
u0
u7
u0
u7
u0
-1
u5
u6
u1
u2
u3
u4
40
30
30
20
20
10
10
0
0
-10
-10
-20
-30
-20
-40
-30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Rys. Prędkość silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s przy tradycyjnym
sterowaniu wektorowym DFOC.
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Rys. 5.6.6. Prądy fazowe silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s przy
tradycyjnym sterowaniu wektorowym DFOC.
1.5
20
15
1
10
0.5
5
0
0
-5
-0.5
-10
-15
-1
-20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
-1.5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Rys. 5.6.4 Moment silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s przy tradycyjnym
sterowaniu wektorowym DFOC.
Rys.5.6.8. Składowaβ strumienia stojana silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s
przy tradycyjnym sterowaniu wektorowym DFOC.
15
0.8
10
0.6
5
0.4
0.2
0
0
-5
-0.2
-10
-0.4
-15
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
-0.6
-0.8
-0.8
Rys. 5.6.10 Moment elektromagnetyczny silnika klatkowego podczas zmiany skokowej wartości
momentu zadanego z 10Nm do – 10Nm, przy tradycyjnym sterowaniu wektorowym DFOC.
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
400
Rys. 5.6.17. Strumień stojana silnika we współrzędnych αβ podczas zmiany skokowej wartości momentu
zadanego z 10Nm do – 10Nm, przy klasycznym sterowaniu DTC.
300
15
10
200
100
Uab [V]
5
0
0
-100
-5
-200
-10
-15
0.05
-300
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
0.15
Rys. 5.6.11. Prądy fazowe ia, ib, ic silnika podczas zmiany skokowej wartości momentu zadanego z
10Nm do – 10Nm, przy klasycznym sterowaniu DTC..
-400
0.0895
0.0897
0.0899
0.0901
0.0903
0.0905
t [s]
Rys. 5.6.22 Napięcie przewodowe Uab stojana silnika klatkowego podczas zmiany skokowej
wartości momentu zadanego z 10Nm do – 10Nm, przy tradycyjnym sterowaniu wektorowym DFOC.