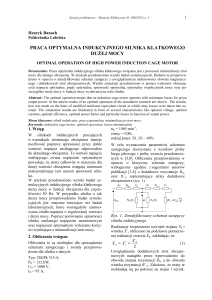
5. Regulacja częstotliwościowa prędkości obrotowej
silnika indukcyjnego klatkowego
5.1 Zasada regulacji częstotliwościowej - warunki optymalizacji
statycznej;
5.2 Regulacja skalarna prędkości obrotowej ( U/f);
5.3 Regulacja wektorowa prędkości obrotowej
5.4 Metoda bezpośredniego sterowania momentem i strumieniem
(DTC);
Falownik napięcia z rezystorem hamowania
Falownik napięcia ze zwrotem energii do sieci
- nawrotny układ tyrystorowy
Falownik napięcia ze zwrotem energii do sieci
- tranzystorowy mostek sieciowy
Charakterystyka mechaniczna silnika klatkowego z
zaznaczonymi zakresami pracy
Związek napięcia z częstotliwością
Dla małych f ==> I≈U/R
Ψ=L/R*U ==> U=Ψ*R/L = k1
Dla duŜych f ==> I≈U/ωL
Ψ=U/ω ==> U=Ψ* ω = k2*f
Przykładowy zestaw charakterystyk statycznych sterowania
silnika klatkowego
us
f
r
-0,24
0
0,24
1,0
2
us =
0,8
0,6
R w Rs
w − f s ( f s − n )
R w Ls
w
+
[ f s Rw Ls + ( f s − n)Rs Lw ]2
w2
2
2
+ ( f s − n)
2
Gdzie: w = Ls Lw − LM
0,4
— wyznacznik reaktancji maszyny asynchronicznej
0,2
0
-1,0
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1,0
Kiedy silnik pracuje na idealnym biegu jałowym
R
u s = f s 1 + s
f s Ls
Praktycznie stosowana charakterystyka sterowania silnika
indukcyjnego klatkowego
u s = u s0 + f s
u s 0 = is Rs
Charakterystyki mechaniczne silnika klatkowego przy róŜnych
częstotliwościach zasilania
Schemat układu skalarnej regulacji prędkości silnika indukcyjnego
klatkowego wg zasady U/f = const. (bez regulacji prądu)
Charakterystyki mechaniczne silnika
Przy napięciu zasilania 400V
Przy zastosowaniu charakterystyki U/f=const. (widocznej
poniŜej)
Wzór na prąd stojan i S
w funkcji pulsacji wirnika
2
1
is =
Ls
Lr
1 + ωr
rr
2
w
1+
ωr
xs rr
Przykładowe przebiegi charakterystyk i S = f
(ω R )
dla
ΨS = ΨR = 1
Metoda pośredniego sterowania strumienia silnika klatkowego z
uwzględnieniem prądu
Sterowanie skalarne U/f=const. rozruch i skok momentu
oporowego
Sterownie skalarne U/f=const. rozruch bez rampy
Sterownie skalarne U/f=const. rozruch z rampą 1s
Sterowanie skalarne z regulacją prądu rozruch i skok momentu
oporowego
Silnik Indukcyjny Klatkowy – Sterowanie
Skalarne
Opis matematyczny silnika indukcyjnego klatkowego
- równania napięciowe obwodu stojana i
wirnika
d
u sk = rs i sk + Ψ sk + jωk Ψ sk
dt
d
u rk = rr i rk + Ψ rk + j (ωk − ωm )Ψ rk
dt
- równania strumieniowo-prądowe
Ψ sk = Ls i sk + LM i rk
Ψ rk = Lr i rk + LM i sk
- równanie ruchu
dω m
1
[me − mo ]
=
dt
TM
- równanie momentu elektromagnetycznego
{
me = Im Ψ sk i sk
gdzie:
JΩ sN
TM =
,
pb M N
*
}
Ls = Lδs + LM ,
Lr = Lδr + LM .
Silnik Indukcyjny klatkowy – Sterowanie wektorowe
Wykres wektorowy zmiennych stanu silnika we współrzędnych polowych
isx = isα cos γ sΨ + isβ sin γ sΨ
isy = −isα sin γ sΨ + isβ cos γ sΨ
Ilustracja skalarnej regulacji momentu silnika
(odpowiedź na skok wartości zadanej)
Ilustracja wektorowej regulacji momentu silnika
(odpowiedź na skok wartości zadanej)
isd
LM
Tr
+
ψr
1
s
-
mop
1
Tr
LM
Tr
-
isq
X
+
ω
1
TM s
me
LM
Tr
÷
ωr
Rys. Schemat strukturalny silnika indukcyjnego klatkowego sterowanego
prądowo we współrzędnych d,q.
Struktura układu bezpośredniego sterowania polowo zorientowanego przy
wymuszeniu prądowym z histerezowymi regulatorami prądu
Układ sterowania wektorowego IFOC
∫
Porównanie dynamiki metod skalarnej
i wektorowej
Sterowanie wektorowe rozruch i skok momentu oporowego
Rozruch nawrót i hamowanie przy sterowaniu skalarnym z bezpośrednim
sterowaniem strumienia
Rozruch nawrót i hamowanie przy sterowaniu wektorowym
Wektorowa reprezentacja napięcia wyjściowego falownika: a) uproszczony
schemat falownika zasilającego silnik, b) połoŜenie wektorów napięcia
β
γs(2)
γs(3)
u3
u1
u4
u6
ψs
γs(1)
ψr
α
γs(4)
2Hψ
γs(5)
γs(6)
Rys. Wybór wektora napięcia wyjściowego falownika w zaleŜności od połoŜenia
strumienia stojana
Układ bezpośredniego sterowania momentu i strumienia (DTC) silnika
klatkowego zasilanego z falownika napięcia
Tabela selekcji wektora napięcia wyjściowego falownika
dψ
1
0
dm
γ s(1)
γ s(2)
γ s(3)
γ s(4)
γ s(5)
γ s(6)
1
u2
u3
u4
u5
u6
u1
0
u0
u7
u0
u7
u0
u7
-1
u6
u1
u2
u3
u4
u5
1
u3
u4
u5
u6
u1
u2
0
u7
u0
u7
u0
u7
u0
-1
u5
u6
u1
u2
u3
u4
40
30
30
20
20
10
10
0
0
-10
-10
-20
-30
-20
-40
-30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Rys. Prędkość silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s przy tradycyjnym
sterowaniu wektorowym DFOC.
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Rys. 5.6.6. Prądy fazowe silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s przy
tradycyjnym sterowaniu wektorowym DFOC.
1.5
20
15
1
10
0.5
5
0
0
-5
-0.5
-10
-15
-1
-20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
-1.5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Rys. 5.6.4 Moment silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s przy tradycyjnym
sterowaniu wektorowym DFOC.
Rys.5.6.8. Składowaβ strumienia stojana silnika klatkowego podczas nawrotu z 25rad/s do - 25rad/s
przy tradycyjnym sterowaniu wektorowym DFOC.
15
0.8
10
0.6
5
0.4
0.2
0
0
-5
-0.2
-10
-0.4
-15
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
-0.6
-0.8
-0.8
Rys. 5.6.10 Moment elektromagnetyczny silnika klatkowego podczas zmiany skokowej wartości
momentu zadanego z 10Nm do – 10Nm, przy tradycyjnym sterowaniu wektorowym DFOC.
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
400
Rys. 5.6.17. Strumień stojana silnika we współrzędnych αβ podczas zmiany skokowej wartości momentu
zadanego z 10Nm do – 10Nm, przy klasycznym sterowaniu DTC.
15
300
10
200
100
Uab [V]
5
0
0
-100
-5
-200
-10
-15
0.05
-300
0.06
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
0.15
Rys. 5.6.11. Prądy fazowe ia, ib, ic silnika podczas zmiany skokowej wartości momentu zadanego z
10Nm do – 10Nm, przy klasycznym sterowaniu DTC..
-400
0.0895
0.0897
0.0899
0.0901
0.0903
0.0905
t [s]
Rys. 5.6.22 Napięcie przewodowe Uab stojana silnika klatkowego podczas zmiany skokowej
wartości momentu zadanego z 10Nm do – 10Nm, przy tradycyjnym sterowaniu wektorowym DFOC.