Nr 56
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Politechniki Wrocławskiej
Nr 56
Studia i Materiały
Nr 24
2004
Silnik synchroniczny, dwubiegowy,
modelowanie polowo-obwodowe
Janusz BIALIK*, Jan ZAWILAK*, Ludwik ANTAL*
POLOWO – OBWODOWY MODEL DWUBIEGOWEGO
SILNIKA SYNCHRONICZNEGO
W artykule przedstawiono dwuwymiarowy, polowoobwodowy model dwubiegowego silnika
synchronicznego dużej mocy o biegunach wydatnych. Model umożliwia wyznaczenie zarówno
statycznych jak i dynamicznych charakterystyk silnika oraz badanie wpływu wartości parametrów
układu zasilania i uzwojeń na przebiegi tych charakterystyk. Korzystając z opracowanego modelu
obliczono przebiegi prądów twornika i wzbudzenia, momentu elektromagnetycznego oraz prędkości
obrotowej w różnych stanach pracy. Analizowane stany pracy to rozruch, bieg jałowy i stan
obciążenia dla obu prędkości obrotowych. Ponadto zbadano rozruch dwustopniowy czyli rozruch
asynchroniczny do prędkości mniejszej, przełączenie układu połączeń uzwojenia twornika i rozruch
do prędkości większej. Aby uzasadnić odkształcenia prądów stojana wyznaczono również rozkład
składowej normalnej indukcji w szczelinie.
1. WSTĘP
W celu dokładnego odwzorowania różnych stanów pracy maszyn wirujących
pożądane jest jednoczesne rozwiązywanie równań pola magnetycznego, równań
obwodowych oraz równania ruchu [6]. Takie możliwości mają metody modelowania
polowoobwodowego maszyn elektrycznych z odwzorowaniem ruchu elementów
wirujących. Metody te mogą być wykorzystywane w procesie projektowania maszyn
jak również w analizie zjawisk w nich zachodzących (hałas magnetyczny, drgania
pochodzenia elektromagnetycznego i mechanicznego, nagrzewanie itp.).
Modelowanie może dotyczyć przestrzeni dwu- lub trójwymiarowych. Modele 3D są
dokładniejsze niż modele 2D. Jednakże budowa modelu w przestrzeni
__________
*
Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wrocław,
ul. Smoluchowskiego 19, [email protected], [email protected],
[email protected],
trójwymiarowej, a przede wszystkim jego obliczenia są bardzo czasochłonne. Jest to
szczególnie trudne przy skomplikowanych strukturach i kształtach modelowanej
maszyny. Z tego względu analizy trójwymiarowe w klasycznych maszynach
wirujących stosowane są wtedy, gdy istnieje potrzeba zbadania wpływu stref nie
odwzorowywalnych w modelach 2D. Większe znacznie praktyczne mają modele
dwuwymiarowe. W modelach tych istnieje możliwość uwzględnienia elementów stref
czołowych i zmian geometrycznych wzdłuż osi maszyny (np. skos żłobków) [5].
Poprawność modelu dwuwymiarowego można sprawdzić porównując charakterystyki
maszyny obliczone za jego pomocą z charakterystykami obliczonymi w modelu
trójwymiarowym. Jeszcze lepszym sposobem weryfikacji modelu jest porównanie
przebiegów obliczonych z wyznaczonymi pomiarowo badając modele fizyczne
maszyn [8]. W przedstawianej pracy zaprezentowano wyniki obliczeń dwubiegowego
silnika synchronicznego typu GAe1510/12p w różnych stanach jego pracy, a
mianowicie rozruchu, biegu jałowego i stanu obciążenia. Dwubiegowy silnik
synchroniczny [1, 2, 3] to maszyna niesymetryczna o przełączalnych uzwojeniach
twornika i wzbudzenia. Jej niesymetria warunkuje uzyskanie drugiej prędkości
synchronicznej. Zarówno niesymetria jak i przełączalność uzwojeń to przesłanki do
zamodelowania badanego silnika za pomocą metody polowo–obwodowej.
2. METODA ANALIZY
Model matematyczny maszyny elektrycznej zawiera równania pola
elektromagnetycznego i równania napięciowe, które opisują źródło zasilania i sposób
połączenia uzwojeń. Równanie pola dla problemu elektromagnetycznego z ruchem,
opisuje zależność [6]:
A
A V
v A
t
(1)
gdzie: A – magnetyczny potencjał wektorowy, V – potencjał elektryczny,
– reluktywność, – rezystywność, – prędkość elementów ruchomych.
Dla modeli dwuwymiarowych, wektor A oraz V maja tylko jedną składową w
kierunku osi z. W takim przypadku potencjał skalarny V ma stałą wartość w kierunku
poprzecznym do przewodnika. Wówczas równanie (1) można przedstawić w postaci:
Vp dA
A
dt
l
(2)
gdzie: l – głębokość maszyny.
Elementy wirujące zostały odniesione do układu współrzędnych związanego z
wirnikiem, więc pochodna cząstkowa magnetycznego potencjału wektorowego A
stała się teraz pochodną zwyczajną.
W równaniach prądowych można wyróżnić dwa rodzaje przewodników:
przewodniki, gdzie zjawisko wypierania prądu może być zaniedbane i takie, w
których wypieranie prądu ma istotne znaczenie dla rozkładu pola (np. klatki silników
indukcyjnych i synchronicznych). W tych pierwszych gęstość prądu w całej objętości
przewodnika jest taka sama. Aby w obliczeniach uwzględnić zmiany w źródłach pola,
równania obwodowe musza być rozwiązywane równocześnie z równaniami
polowymi. Równania obwodowe uzwojeń bez wypierania prądu zapisuje się w
postaci [6]:
N c l dA
di
d Ri L u ź
Sa
dt
dt
(3)
gdzie: Nc – całkowita liczba przewodów w uzwojeniu, a – liczba gałęzi równoległych,
S – pole powierzchni przewodnika, uź – napięcie źródła, i – prąd w uzwojeniu.
Pierwszy człon równania (3) reprezentuje napięcie indukowane w uzwojeniu,
drugi spadek napięcia na rezystancji R uzwojenia, a trzeci napięcie na indukcyjności L
połączeń czołowych.
W przypadku obwodów klatek, pręty są połączone na obu końcach pierścieniami
zwierającymi. Równanie napięciowe dla klatki, traktowanej jako uzwojenie
wielofazowe, ma postać [6]:
rpn i p l pn
di p
dt
C C V p
T
(4)
a gęstość prądu Jp w pręcie klatki wyraża wzór [6]:
V p dA
J p
dt
l
(5)
gdzie: rpn – rezystancja wycinka pierścienia między dwoma prętami klatki, lpn –
indukcyjność wycinka pierścienia między dwoma prętami klatki, [C] – macierz
połączeń prętów klatki, ip – natężenie prądu w pręcie klatki.
Równania polowe i prądowe są dyskretyzowane w dziedzinie czasu. Prowadzi to
do dużego, złożonego, nieliniowego układu równań. Ostateczny układ równań jest
wynikiem sprzężenia równań polowych i obwodowych. Jego niewiadomymi są
wartości potencjału wektorowego w węzłach siatki dyskretyzującej, prądy w
uzwojeniach oraz wartość elektrycznego potencjału skalarnego między końcami
prętów.
Rys. 1. Fragment siatki wirującej szczeliny
Fig. 1. Portion of rotating air-gap mesh
Równania polowe i obwodowe uzupełnia równanie ruchu w postaci [6]:
J
d
f M e M o
dt
(6)
gdzie: J – moment bezwładności, – prędkość kątowa, f – współczynnik tarcia,
Mo – moment obciążenia, Me – moment elektromagnetyczny.
Moment elektromagnetyczny jest obliczany metodą pracy wirtualnej w każdym
kroku czasowym. Ruch wirnika jest odwzorowany za pomocą powierzchni ślizgowej.
Ta technika wykorzystuje do obliczeń dwie niezależne siatki w części nieruchomej i
ruchomej (rys.1).
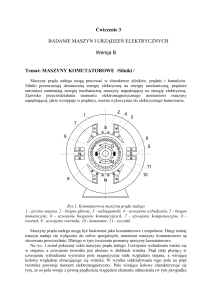
3. POLOWOOBWODOWY MODEL SILNIKA SYNCHRONICZNEGO
W omówiony wcześniej sposób zbudowano polowoobwodowy model
jednouzwojeniowego, dwubiegowego silnika synchronicznego typu GAe1510/12p o
danych znamionowych zamieszczonych w tabeli 1. Badany silnik to zmodernizowany
10-biegunowy silnik jednobiegowy o biegunach wydatnych. Dwuwymiarowy model
uwzględnia napięcia sieci zasilającej, uzwojenia fazowe stojana oraz obwodu wirnika
o zmiennej indukcyjności i stałej rezystancji. W opracowanym modelu przyjęto stałą
wartość rezystancji i indukcyjności połączeń czołowych obwodu stojana i wirnika jak
również pierścieni zwierających klatki rozruchowej, długość maszyny równą długości
stojana oraz sinusoidalne przebiegi napięcia zasilającego. Część polowa silnika
(rys.2) uwzględnia nieliniowość elementów magnetycznych oraz ruch wirnika.
Tabela 1. Dane znamionowe silnika
Table. 1. Rated parameters of the motor
Moc znamionowa
kW
600
1050
Napięcie stojana
V
6000
6000
Układ połączeń stojana
-
Y
YY
Prąd stojana
A
86
121
Napięcie wzbudzenia
V
51
70
Prąd wzbudzenia
A
175
240
Prędkość znamionowa
obr/min
500
600
Współczynnik mocy
-
0,8 ind.
0,9 poj.
Sprawność
%
80
94,2
Rys. 2. Część polowa modelu; 1 – stojan, 2 – wirnik, 3 – wał, 4 – obwód wzbudzenia,
5 – obwód tłumiący, 6 – szczelina powietrzna
Fig. 2. Field part of the model; 1 – stator, 2 – rotor, 3 – shaft, 4 – field winding, 5 – damping circuit, 6 –
air gap
Rys. 3. Część obwodowa modelu: a – uzwojenie twornika, b – uzwojenie wzbudzenia,
c – obwód tłumiący
Fig. 3. Circuit part of the model: a – armature winding, b – field winding, c – damping circuit
Model obwodowy (rys. 3) uwzględnia parametry elektryczne układów zasilania
oraz przełączalne układy połączeń uzwojeń stojana, wzbudzenia i klatki rozruchowej.
Obwody twornika i wzbudzenia (rys. 3a i 3b) są reprezentowane przez prostoliniową
część uzwojenia o zmiennej indukcyjności i stałej rezystancji oraz rezystancji (Rp) i
indukcyjności (Lp) połączeń czołowych o stałych wartościach.
Uzwojenie klatki rozruchowej silnika (rys. 3c) jest odwzorowane przez pręty
równoległe o zmiennych rezystancjach i indukcyjnościach, połączone na czołach
rezystancją (Rpn) i indukcyjnością (Lpn) wycinków pierścienia zwierającego o stałych
wartościach.
Wartości indukcyjności i rezystancji wycinków pierścieni zwierających klatki
rozruchowej oraz reaktancji połączeń czołowych uzwojenia stojana obliczono ze
wzorów stosowanych w projektowaniu maszyn elektrycznych [7],[9]:
R pn
1 D pn
Żs pn
L pn z 2 10 8
(7)
(8)
f w1 l
q
X p 0,158
0,34 l 1 0,64 y
100 100 pq
l
2
(9)
w których: – współczynnik oporności, – przyrost temperatury, Dpn – średnica
pierścienia zwierającego, – konduktywność, Ż – średnica elementu
wirującego, spn – przekrój pierścienia zwierającego, z – liczba zwojów, –
przewodność rozproszenia, w1 – liczba zwojów na fazę, l – długość
pakietu stojana, p – liczba par biegunów, q – liczba żłóbków przypadająca
na biegun i fazę, l1 – średnia długość połączenia czołowego, y – poskok.
Wartości rezystancji uzwojeń twornika i wzbudzenia zostały wyznaczone
pomiarowo na stacji prób.
4. WYNIKI OBLICZEŃ
Dla sprawdzenia poprawności opracowanego modelu wykonano obliczenia
charakterystyk czasowych momentu, prądów i prędkości obrotowej silnika podczas
rozruchu, biegu jałowego i obciążenia. Zbadano rozruchy bezpośrednie do obu
prędkości 500 i 600 obr/min, a ponadto rozruch dwustopniowy, czyli rozruch do
prędkości mniejszej, przełączenie uzwojeń i rozruch do prędkości większej.
W obliczeniach założono, że moment bezwładności układu jest równy momentowi
inercji wirnika silnika wynoszącemu 550 kgm2. Oznacza to, że rozruchy zostały
zrealizowane bez sprzęgnięcia z wentylatorem. Takie założenie było konieczne, gdyż
rozruch zespołu napędowego z wentylatorem kopalnianym trwa około 45 sekund.
Obliczenia tak długiego rozruchu, wykonywane z gwarantującym odpowiednią
dokładność krokiem czasowym 0,5 ms, trwałyby bardzo długo. Dla badania
przebiegów biegu jałowego i obciążenia przy ustalonej prędkości założenie
obniżonego momentu bezwładności nie ma oczywiście znaczenia. Symulacje stanu
obciążenia wykonano dla momentu 0,7 Mn.
Na rysunku 4 przedstawiono rozkład składowej normalnej indukcji w szczelinie w
stanie obciążenia. Odkształcenia indukcji uzasadniają przebiegi prądów podczas
biegu jałowego i obciążenia przedstawionych na rysunkach 5 i 6 oraz przebiegi
momentu elektromagnetycznego dla tych samych stanów pracy przedstawione na
rysunkach 7 i 8. Odkształcenia prądów i momentów podobnie jak składowej
normalnej indukcji w szczelinie są znacznie większe dla mniejszej prędkości
obrotowej, która jest uzyskiwana przez niesymetryczne połączenie uzwojenia
wzbudzenia i odpowiednie przełączenie uzwojenia twornika. Wykresy na rysunkach
9, 10 i 11 pokazują przebiegi momentu elektromagnetycznego, prędkości i prądu
twornika podczas rozruchu bezpośredniego do każdej z dwóch prędkości
synchronicznych silnika. Czas rozruchu wynoszący 5,5 s dla silnika 12 biegunowego i
1,5 s dla 10 biegunowego jest zbliżony do
a)
b)
Rys. 4. Rozkład składowej normalnej indukcji w szczelinie w stanie obciążenia dla: a) 2p=12, b) 2p=10
Fig. 4. Normal component of the flux density in air-gap at load torque for: a) 2p=12, b) 2p=10
a)
b)
Rys. 5. Przebieg prądu stojana w stanie jałowym dla: a) 2p=12, b) 2p=10
Fig. 5. Current waveform of the stator at no load for: a) 2p=12, b) 2p=10
a)
b)
Rys. 6. Przebieg prądu stojana w stanie obciążenia dla: a) 2p=12, b) 2p=10
Fig. 6. Current waveform of the stator at load torque for: a) 2p=12, b) 2p=10
a)
b)
Rys. 7. Przebieg momentu elektromagnetycznego w stanie jałowym dla: a) 2p=12, b) 2p=10
Fig. 7. Waveform of the electromagnetic torque at no load for: a) 2p=12, b) 2p=10
a)
b)
Rys. 8. Przebieg momentu elektromagnetycznego w stanie obciążenia dla: a) 2p=12, b) 2p=10
Fig. 8. Waveform of the electromagnetic torque at load torque for: a) 2p=12, b) 2p=10
a)
b)
Rys. 9. Przebieg momentu elektromagnetycznego podczas rozruchu dla: a) 2p=12, b) 2p=10
Fig. 9. Waveform of the electromagnetic torque during start up for: a) 2p=12, b) 2p=10
a)
b)
Rys. 10. Przebieg prędkości podczas rozruchu dla: a) 2p=12, b) 2p=10
Fig. 10. Waveform of the speed during start up for: a) 2p=12, b) 2p=10
a)
b)
Rys. 11. Przebieg prądów stojana podczas rozruchu dla: a) 2p=12, b) 2p=10
Fig. 11. Phase current waveforms of the stator during start up for: a) 2p=12, b) 2p=10
Rys. 12. Przebieg momentu elektromagnetycznego podczas rozruchu dwustopniowego
Fig. 12. Waveform of the electromagnetic torque during two-step start up
Rys. 13. Przebieg prądów stojana podczas rozruchu dwustopniowego
Fig. 13. Phase current waveforms of the stator during two-step start up
czasu rozruchu uzyskiwanego podczas badań na stacji prób zakładu wytwórczego,
gdzie silnik był badany bez sprzęgnięcia z wentylatorem. Rysunki 12 i 13 pokazują
obliczone przebiegi momentu elektromagnetycznego i prądu twornika podczas
rozruchu dwustopniowego. Po upływie 6 s uzyskano pierwszą prędkość
podsynchroniczną, zbliżoną do 500 obr/min i wówczas uzwojenia twornika oraz
wzbudzenia zostały przełączone do układów odpowiadających maszynie 10
biegunowej. Stan ustalony dla drugiej prędkości uzyskano po upływie 0,2 s.
5. WNIOSKI
Opracowany i opisany model dwubiegowego silnika synchronicznego pozwala na
wyznaczenie charakterystyk stanów ustalonych i przejściowych. Umożliwia również
symulację z przełączeniami uzwojeń w trakcie jej trwania. Uzyskane wyniki są
zgodne z przewidywaniami i zbliżone do uzyskanych pomiarowo [4], co świadczy
o poprawności modelu. W dalszych pracach opracowany model będzie udoskonalony
poprzez dokładniejszą identyfikację parametrów uzwojeń i własności materiałów
elektromagnetycznie czynnych. Model będzie wykorzystywany do optymalizacji
konstrukcji silnika dwubiegowego. Przewiduje się również zastosowanie
opracowanego modelu do analizy zjawisk mechanicznych i cieplnych, występujących
w rozpatrywanej maszynie a wynikających z jej niesymetrii.
LITERATURA
[1] ANTAL L., ZAWILAK J., Pole magnetyczne synchronicznego silnika jawnobiegunowego o dwóch
prędkościach obrotowych, Prace Nauk. IMiNE. PWr. nr 45, Studia i Materiały nr 19, 1996.
[2] ANTAL L., ZAWILAK J., Moment dwubiegowego silnika synchronicznego o przełączalnych
uzwojeniach twornika i magneśnicy, 39th International Symposium on Eletrical Machines, SME
2003, GdańskJurata, June 911, 2003, P104, s. 8.
[3] ANTAL L., ZAWILAK J., Kształtowanie pola magnetycznego dwubiegowego silnika
synchronicznego, PEMINE Ustroń, 2830 maja, 2003, Masz. Elektr. Zesz. Probl. BOBRME Komel
2003, s. 6772.
[4] BIALIK J., ZAWILAK J., Polowo-obwodowy model dwubiegowego silnika synchronicznego –
weryfikacja pomiarowa, Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Politechniki Wrocławskiej, Nr 56, Studia i Materiały, Nr 24, Wrocław, 2004
[5] DEMENKO A., Polowe metody analizy maszyn elektrycznych. Zeszyty Naukowe Politechniki
Śląskiej Seria Elektryka z.176, 2001, 4158.
[6] ZHOU P., STANTON S., CENDES Z. J., Dynamic Modeling of Electric Machines, www.ansoft.com.
[7] DUBICKI B., Maszyny elektryczne, tom III, Warszawa, PWN, 1964.
[8] HAMAEYER K., BELMANS R., DE WEERDT R., TRUINMANT E., Finite element analysis of
steady state behavior of squirrel cage induction motors compared with measurements, IEEE Transactions on Magnetic, part II, No.2, Vol.33, March 1997, p. 20932096.
[9] SERGEEV P. S., VINOGRADOV N. V., GORJANOV F. A., Projektirovanie Električeskich Mašin,
Energija, Moskva 1969
FIELDCIRCUIT MODEL OF TWOSPEED SYNCHRONOUS MOTOR
It this article twodimensional, fieldcircuit model of twospeed synchronous, silentpole, large
power motor was presented. The model allows to define static and dynamic characteristics as well as the
influence of resistance and reactance values of the end windings, and the parameters of the power supply
on the characteristics. The armature and field winding current, electromagnetic torque and speed in different states of work with used this model were calculated. The following states of work were analyzed:
starting, no load and load for both rotational speed. Moreover a two-step start up, i.e. asynchronous start
up to lower rotational speed, switch configuration connection of armature winding, and start up to higher
speed, were studied. To prove the deformation of stator currents, the normal component of flux density in
air-gap was calculated as well.
Praca naukowa finansowana ze środków Komitetu Badań Naukowych w latach 2004 - 2006 jako
projekt badawczy Nr 3 T10A 005 26