Katedra Termodynamiki,
Mechaniki Płynów i Napędów Lotniczych
Wydział Mechaniczny
Politechnika Lubelska
Adaptacyjne sterowanie śmigłowcowym silnikiem Diesla
autor: mgr inż. Paweł Magryta
Streszczenie
Artykuł prezentuje koncepcję zastosowania adaptacyjnego sterowania silnikiem Diesla
zamontowanym w lekkim śmigłowcu. W pracy przedstawione są ogólne założenia strategii
sterowania silnikami Diesla w motoryzacji oraz przedstawione jest podejście do sterowania
takiego rodzaju silnikiem umieszczonym w śmigłowcu. Artykuł przedstawia założenia lotu
lekkim śmigłowcem w funkcji kontroli prędkości obrotowej silnika oraz prezentuje
możliwość zastosowania adaptacji bezpośredniej w sterowaniu jednostką napędową.
1. Założenia ogólne idealnego silnika Diesla do lekkiego śmigłowca
Biorąc pod uwagę, że całkowita masa startowa lekkiego śmigłowca wynosi około
1200 - 1800 kg, można w prosty sposób w oparciu o ogólne założenia analityczne określić
niezbędną moc potrzebną do lotu. Najbardziej niekorzystne warunki w aspekcie koniecznej
mocy będą występować w przypadku startu takiej jednostki oraz zawisu na pewnej
wysokości. Ponieważ większość jednostek latających tego typu posiada maksymalne pułapy
lotu w okolicach 6000 m n.p.m., można założyć, że silnik Diesla również powinien być
zdolny do pracy w warunkach ISA określonych tą maksymalną wysokością. Uwzględniając te
aspekty można określić niezbędną moc maksymalną na dwóch wysokościach 0 i 2500 m
n.p.m. Ze względu na warunki ciśnieniowe panujące na różnych wysokościach minimalna
moc w przypadku tego drugiego pułapu jest wyższa (tab. 1).
Innym ważnym aspektem zastosowania silnika Diesla jest jego masa. W ogólnym
przeglądzie lekkich maszyn latających można przyjąć masę silników turbowałowych na
poziomie 90 - 100 kg. Ograniczenie masy silnika Diesla o mocy ok. 300 kW do tej wartości
jest niemożliwe. W tabeli 1 przedstawiona została masa silnika równa 180 kg, co w sposób
jasny przekłada się na wartość współczynnika masy do mocy na poziomie mniejszym niż 0,6
kg/kW. Trzeba podkreślić, że wartość ta jest bardzo mała, ponieważ obecnie stosowane w
przemyśle motoryzacyjnym nowoczesne silniki Diesla o zbliżonej mocy posiadają
współczynniki na poziomie 0,9 - 1,2 kg/kW.
Głównym celem zastosowania silnika Diesla w lekkim śmigłowcu jest zmniejszenie
zużycia paliwa i jednocześnie zmniejszenie zanieczyszczenia środowiska. Dlatego też
w tabeli 1 przedstawiono wartość współczynnika godzinowego zużycia paliwa na poziomie
mniejszym niż 0,19 kg/kWh.
Tab. 1. Ogólne założenia dla silnika Diesla w lekkim śmigłowcu
Lp.
Nazwa
Wartość
1.
Moc maks. na wysokości 0 m n.p.m.
300 kW
2.
Moc maks. na wysokości 2500 m n.p.m.
322 kW
3.
Moc ciągła na wysokości 0 m n.p.m.
280 kW
4.
Masa silnika z instalacjami
180 kg
5.
Godzinowe zużycie paliwa
nie większe niż 0,19 kg/kWh
6.
Współczynnik masy do mocy
nie większy niż 0,6 kg/kW
7.
Resurs
nie mniejszy niż 4000 godzin
Najważniejszym parametrem pracy śmigłowca nie przedstawionym w powyższej
tabeli jest prędkość obrotowa wirnika głównego. Wirnik o średnicy 9 m powinien pracować
nominalnie z prędkością 400 - 420 obr/min, natomiast wirnik ogonowy o średnicy 0,8 m
z prędkością ok. 5200 - 6000 obr/min. Wartości te mogą ulegać nieznacznym odchyleniom
podczas lotu o ok. ± 5% wartości nominalnej. Za nieprzekroczenie tych wartości odpowiadać
będzie adaptacyjny system sterowania.
2. Zmienne zewnętrzne warunki lotu śmigłowca
Śmigłowiec podczas lotu jest narażony na bardzo dużo zmiennych warunków
zewnętrznych wpływających bezpośrednio na obciążenie łopat rotora głównego, co w sposób
oczywisty przekłada się na zmienne warunki pracy silnika napędzającego ten statek
powietrzny.
Należą do nich m.in.:
zmiana masy podwieszonego ładunku,
zmiana masy wynikająca ze zmiany ilości pasażerów śmigłowca,
zmiana masy wynikająca ze spalenia pewnej ilości paliwa,
zmienna prędkość, kierunek i zwrot wiatru podczas lotu,
nagłe lokalne zmiany gęstości powietrza,
zmienność ukształtowania otoczenia, szczególnie podczas lotu w terenie miejskim.
Poniżej ukazano przykładowy udział procentowy stanów pracy helikoptera wraz
z wartością niezbędnej mocy potrzebnej w tym stanie pracy. Jak widać z tabeli 2 największy
udział procentowy pracy śmigłowca stanowią takie przedziały jak: loty z prędkością
przelotową, loty wytrzymałościowe czy loty w dobrych warunkach. Właśnie podczas tych
stanów lotu występują najmniej korzystne zjawiska wpływające na nagłą zmianę
zapotrzebowania na chwilową moc silnika, na które w sposób natychmiastowy powinien on
reagować.
Tab. 2. Warunki lotu lekkiego śmigłowca
Lp. Warunki lotu
1.
Warunki przyziemne
2.
Autorotacja
3.
Obniżanie
4.
Loty wytrzymałościowe
5.
Loty z prędkością przelotową
6.
Loty w dobrych warunkach
7.
Manewry dynamiczne
8.
Zawis, start
Moc
0%
10%
30%
31-60%
61-80%
81-99%
100%
Max
Czas
0,38%
1,18%
3,31%
26,62%
38,42%
15,58%
6,67%
7,66%
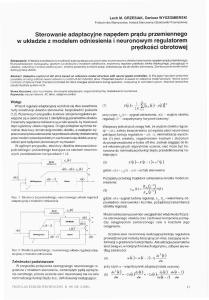
Bardzo znaczący wpływ na warunki lotu śmigłowca ma występowanie nagłych,
nieprzewidywalnych podmuchów wiatru. Na rysunku 1 przedstawiono przykładowy wykres
ilustrujący średnią prędkość wiatru zmierzoną w ciągu następujących po sobie 2 minutowych
odcinków czasu, jego kierunek i wartość dynamiczną występowania podmuchów w czasie 3
sekund. Jak widać z wykresu te przykładowe warunki wietrzne charakteryzują się bardzo
dużą niejednorodnością i chaosem. Jednostka powietrzna pracująca podczas takich warunków
wietrznych będzie potrzebowała ciągłego zmiennego zapotrzebowania na moc, lecz ze stałą
prędkością obrotową.
1
Rys. 1. Czasowa obserwacja warunków wietrznych w miejscowości Hoquiam
1
http://www.climate.washington.edu/stormking/December2007.html
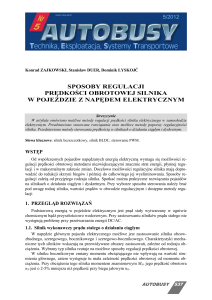
Zastosowanie sterowania silnikiem w aspekcie zmiennych warunków zewnętrznych
zostało potwierdzone m.in. w pracach naukowych dotyczących sterowania modelarskich
śmigłowców. Zgodnie z rysunkiem 2 podczas wystąpienia bocznego wiatru pozycja
modelarskiego śmigłowca zaczęła się zmieniać w każdej badanej osi x, y, z. Sytuacja taka jest
odzwierciedleniem warunków dla śmigłowca w dużej skali.
2
Rys. 2. Zmiana pozycji modelarskiego śmigłowca w badanej przestrzeni
3. Sterowanie śmigłowcowym silnikiem Diesla
Obecnie stosowane silniki Diesla w motoryzacji wyposażone są w bezpośredni wtrysk
paliwa do komory spalania. Dzięki postępowi technologicznemu możliwe jest wykonanie
głównych elementów układu paliwowego (pompy wysokiego ciśnienia oraz wtryskiwacza)
w sposób umożliwiający precyzyjne podawanie dawki paliwa. Konstrukcja pomp
wtryskowych wysokiego ciśnienia umożliwia osiągnięcie ciśnienia paliwa rzędu ponad
20 MPa, co w połączeniu z dużą dokładnością wykonania wtryskiwacza pozwala na lepsze
rozdrobnienie strugi podawanego paliwa, a w połączeniu z elektronicznym układem
sterowania wtryskiem (kąt początku wtrysku, ciśnienie wtrysku i czas otwarcia wtryskiwacza)
pozwala na dozowanie odpowiedniej dawki paliwa w każdych warunkach pracy silnika.
Przekłada się to na wzrost mocy jednostki napędowej i jej ekologiczność. Schemat sterowania
samochodowym silnikiem Diesla został przedstawiony na rysunku 3.
2
Źródło: Cunjia Liu, Wen-HuaChen, JohnAndrews: „Tracking control of small-scale helicopters using explicit
nonlinear MPC augmented with disturbance observers” Control Engineering Practice
Rys. 3. Schemat sterowania samochodowym silnikiem Diesla
Podobny system sterowania będzie zastosowany w lekkim śmigłowcu. Najważniejszą
różnicą w porównaniu do systemu występującego w samochodzie będzie zupełnie odwrócona
strategia sterowania. W zależności od zastosowanego silnika Diesla wartością zadaną
w sterowaniu będzie prędkość obrotowa na poziomie ok. 4000 obr/min. Wartością zmienną
będzie chwilowe zapotrzebowanie na moc, zależne głównie od warunków lotu. Natomiast
wartością sterowaną będzie w sposób pośredni ilość paliwa dostarczanego do komory
spalania silnika, a w sposób bezpośredni jednostka sterująca będzie ustalać wydatki
poszczególnych wtryskiwaczy. Schemat sterowania śmigłowcowym silnikiem Diesla został
przedstawiony na rysunku 4.
Wartość zadana
ok. 4000 obr/min
Wartość sterowana
?
n [obr/ min]
Q [mm3/skok]
Me [Nm]
Wartość zmienna
warunki lotu
Rys. 4. Schemat sterowania śmigłowcowym silnikiem Diesla
Do odpowiedniej regulacji prędkości obrotowej silnika będzie zastosowana strategia
sterowania z wykorzystaniem adaptacji bezpośredniej. Poniżej przedstawione zostały
schematy sterowania w sposób wykorzystujący adaptację pośrednią (rys. 5) i adaptację
bezpośrednią (rys. 6). Istotą tych układów regulacji jest powiązanie parametrów regulatora
z wynikami bieżącej identyfikacji modelu parametrycznego, przeprowadzanej na podstawie
bieżących pomiarów wielkości sterujących i wielkości regulowanej obiektu. Zaletą tego
układu jest zdolność wykrywania zmian parametrów obiektu, niezależnie od tego czym
zostały wywołane. Wadą jest natomiast bardzo duża złożoność teoretyczna, gdyż nawet
w przypadku liniowego modelu obiektu, układ regulacji adaptacyjnej z dołączoną
identyfikacją modelu jest układem nieliniowym, niestacjonarnym, poddawanym zakłóceniom
losowym. Ze względu na brak skutecznych narzędzi teoretycznych powoduje to konieczność
stosowania komputerowych technik symulacyjnych do analizy i projektowania tych układów.
Cel
regulacji
Parametry
regulatora
Wartość
zadana
+
-
Regulator
Identyfikacja
modelu regulatora
Proces
Wielkość
regulowana
Rys. 5. Schemat regulacji adaptacyjnej z identyfikacją pośrednią sterowania
Sterowanie z wykorzystaniem adaptacji pośredniej polega na tym,
że identyfikowanym modelem może być model obiektu. W tym przypadku, na podstawie
znajomości modelu obiektu i celu regulacji, dokonywana jest synteza regulatora poprzez
wyznaczenie jego parametrów. Ponieważ do parametrów regulatora dochodzi się pośrednio za
pomocą parametrów modelu obiektu, regulację taką nazywa się regulacją adaptacyjną
z identyfikacją pośrednią. Zaletą tego układu jest możliwość wykorzystania
zidentyfikowanego modelu do syntezy dowolnego regulatora zaś zidentyfikowane parametry
obiektu są łatwe do interpretacji. Jego wadą jest to, że syntezę regulatora przeprowadza się
w każdym kroku procesu sterowania. Wada ta traci na znaczeniu wobec wzrostu szybkości
obliczeń współczesnych mikrokontrolerów.
Cel
regulacji
Synteza
regulatroa
Parametry
regulatora
Identyfikacja
modelu obiektu
Wartość
zadana
+
-
Regulator
Proces
Wielkość
regulowana
Rys. 6. Schemat regulacji adaptacyjnej z identyfikacją bezpośrednią sterowania
Sterowanie z wykorzystaniem adaptacji bezpośredniej polega na tym,
że identyfikowanym modelem może być model docelowego regulatora. W tym wariancie
identyfikuje się bezpośrednio parametry regulatora – stąd nazwa „regulacja adaptacyjna
z identyfikacją bezpośrednią”. Zaletą tego rozwiązania jest to, że synteza regulatora
dokonywana jest tylko raz off-line. Wadami są trudności w identyfikacji obiektu
nieregulowanego oraz fakt, że liczba identyfikowanych parametrów wzrasta wraz z czasem
opóźnienia i stopniem złożoności regulatora.
4. Podsumowanie
Zastosowanie adaptacyjnego systemu sterowania w lekkim śmigłowcu wyposażonym
w silnik Diesla rokuje duże nadzieje na przyszłość i wydaje się być kierunkiem rozwojowym.
Wymagane jest jednak wykonanie badań symulacyjnych i weryfikacyjnych układu sterowania
w celu eliminacji fluktuacji prędkości obrotowej. Normy lotnicze dopuszczają maksymalnie
5% odstępstwo od tej wartości, dlatego też system ten musi być niezawodny.