Lech M. GRZESIAK, Dariusz WYSZOMIERSKI
Politechnika Warszawska, Instytut Sterowania i Elektroniki Przemysłowej
Sterowanie adaptacyjne napędem prądu przemiennego
w układzie z modelem odniesienia i neuronowym regulatorem
prędkości obrotowej
Streszczenie. W tekście przedstawiono możliwość wykorzystania sztucznych sieci neuronowych w układach sterowania napędem prądu przemiennego.
W prezentowanym rozwiązaniu, opartym na strukturze z modelem odniesienia, neuronowy regulator prędkości silnika indukcyjnego, pracującego w
układzie „naturalnej orientacji wektora pola", zmienia parametry w trakcie pracy, dostosowując się do obiektu sterowania. Zamieszczone wyniki badań
ilustrują pracę układu.
Abstract. (Adaptive control of AC drive based on reference model structure with neural speed controller). In this paperhas been presented
possibility of using artificial neural network in control of AC induction dhve. Presented solution is based on reference model structure. Neural speed
controller of Natura! Field Oriented controlled AC drive changes parameters during operation, readjusting to controlled system. Attached researches
results illustrate system work.
Słowa kluczowe: sieci neuronowe, sterowanie adaptacyjne, napęd elektryczny, modelowanie neuronowe.
Keywords: neural network. AC drive, adaptive control.
Wstęp
W teorii regulacji adaptacyjnej wyróżnia się dwa zasadnicze
nurty konstrukcji układów sterowania: bezpośredni i pośredni
[1,2]. W pierwszym przypadku, budowa i strojenie regulatora powiązane są w jeden proces z identyfikacją parametrów obiektu.
Parametry regulatora dobierane są w taki sposób, by niwelować
błąd wyjściowy układu regulacji. Drugie podejście wyróżnia formalnie dwie fazy: konstrukcję modelu obiektu, a następnie wypracowanie prawa sterowania na podstawie wiedzy dostarczanej
przez model o prawdopodobnym zachowaniu się obiektu w przyszłości pod wpływem planowanych wymuszeń.
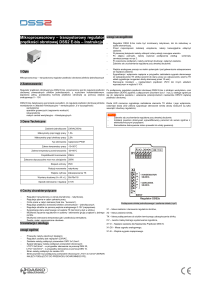
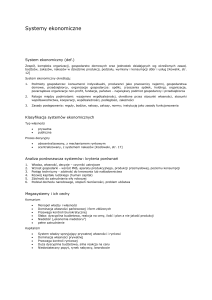
W ogólnym przypadku, struktury układów sterowania bezpośredniego i pośredniego bazujące na sieciach neuronowych, przedstawiono na rysunkach 1 i 2.
(1)
przy czym: ym(k}- sygnał odniesienia, y(k)- wyjście obiektu
regulacji; N- rozpatrywany horyzont czasowy
Wziąwszy jednak pod uwagę fakt, że wyjście obiektu regulacji -y(k), zależy bezpośrednio od wyjścia sieci neuronowej
pełniącej funkcję regulatora - u(k 1), minimalizacja wyrażenia (1) jest, niestety, zagadnieniem trudnym i złożonym
do przeprowadzenia w trybie off-line. Jednak sięgając do teorii rekurencyjnych algorytmów uczenia, sieć może być trenowana do minimalizacji funkcji błędu przedefiniowanej następująco:
E(k)=E(k-l)+e2(k)
(2)
Model
odniesienia
e«=X*) yM
rfr)
[-
f+
NN-Ragulator
gdzie e(k) v, (A) i (A)-uchyb sterowania
Pożądany przebieg trajektorii odniesienia określa model od
niesienia
•K*)
(3)
Rys. 1. Struktura bezpośredniego, neuronowego układu regulacji
adaptacyjnej z modelem odniesienia
gdzie: /•(£) - sygnał zadany regulacji, Ani, Bm - wielomiany, odpowiednio: mianownika i licznika, pożądanej transmitancji
obiektu regulacji.
Model odniesienia powinien uwzględniać właściwości fizyczne sterowanego obiektu oraz zachować kompromis pomiędzy osiągnięciem zamierzonego celu a kosztami jego
osiągnięcia.
Rys. 2. Struktura pośredniego, neuronowego układu regulacji adaptacyjnej z modelem odniesienia
(4)
Zależności podstawowe
W przypadku połączenia szeregowego neuronowego regulatora z obiektem sterowania, zamkniętym pętlą sprzężenia zwrotnego, proces uczenia sieci neuronowej ma na celu
minimalizację funkcji błędu E(k), definiowanej następująco:
PRZEGLĄD ELEKTROTECHNICZNY
Uczenie sieci neuronowej realizującej funkcję regulatora
prowadzone jest metodą iteracyjną (on-line), bazującą na informacji o gradiencie funkcji błędu. Aktualizacja parametrów
sieci (wag w), w kolejnych krokach algorytmu, odbywa się według zależności:
R. 80 NR 1/2004
d\v
przy czym 77 - współczynnik adaptacji (stała uczenia).
dw
= -24)
du(k-l)
dw
II
W trakcie uczenia sieci konieczne staje się uwzględnienie
dynamiki obiektu regulacji - w zależności (5) czynnik
dy(kVdu(k-\). Sygnał błędu podlegający minimalizacji nie jest
mierzony bezpośrednio na wyjściu regulatora. Stąd, dobór poprawek wag sieci neuroregulatora (neuronowy regulator) nie
może być dokonywany bezpośrednio. Uwzględnienie wpływu
obiektu regulacji na szacowany błąd przeprowadza się na różne sposoby. Najprostszym rozwiązaniem jest faktyczne pominięcie wpływu obiektu w procesie trenowania sieci. Określenie uaktualnień wag Aw zostaje zrzucone na barki procedury uczącej przez odpowiedni dobór współczynnika uczenia.
Jest to podejście mało oryginalne i obarczone największymi
wadaim
Wprowadzenie, dodatkowo, neuronowego elementu modelującego regulowany proces, umożliwia wykorzystanie
algorytmu wstecznej propagacji do wyznaczania wag sieci
pełniącej funkcję regulatora. Pozwala to na obejście problemu wyznaczenia składnika d}-(k)/du(k-\), gdy obiekt regulacji jest nieznany. Mianowicie, w miejsce rzeczywistego
obiektu podlegającego regulacji umieszczamy jego model
neuronowy, a do wyznaczenia wymaganych pochodnych
cząstkowych korzystamy, zamiast prawdziwej wartości wyjśc\ay(k), z jej estymaty i>(A-). Przyjmujemy:
(6)
zawierający dwa fikcyjne uzwojenia w stojanie, wirujące z prędkością COK.
dt
(8)
dt
JT
—— = me-m0
dt
=-
przy czym: us, is, \f/s .R^ - odpowiednio, wektory napięcia,
prądu i strumienia oraz rezystancja stojana; ur, ir, y/r, R}
- odpowiednio, wektory napięcia, prądu i strumienia oraz
rezystancja wirnika; J- moment bezwładności wirnika, p liczba par biegunów; com - pulsacja mechaniczna; me, mo
- odpowiednio moment elektromagnetyczny i moment obciążenia silnika.
Koncepcję sterowania NFO (Natural Field Orientation), wywodzącą się bezpośrednio z wektorowych metod sterowania,
zaczerpnięto z [13,14]. W niniejszej pracy wykorzystano uproszczoną postać sterowania NFO. Istotę metody przedstawiono na rysunku 3. Do wyznaczenia pulsacji synchronicznej
maszyny posłużono się zależnością:
du(k-l)
(9)
Dzięki temu, że schemat uczenia zawiera neuronowy
model procesu, możliwe jest potraktowanie neuronowego
regulatora oraz dołączonego neuronowego modelu obiektu jako jednej sieci i przeprowadzenie propagacji wstecznej błędu e(k) = v,„(A-) --y(k) poprzez układ wszystkich wag
obu sieci. Z tą różnicą, że modyfikowane są tylko wagi należące do regulatora. Do wyznaczania poprawek wag neuroregulatora wykorzystywany jest „wirtualny" błąd wyjścia
regulatora neuronowego elt(k)
gdzie: cos — pulsacja synchroniczna silnika; w yv . / -odpowiednio, składowe napięcia i prądu stojana;
(7)
Sam proces uczenia, intuicyjnie prosty, jest znacznie trudniejszy do przeprowadzenia w praktyce niż powszechnie spotykany, ogólny tryb trenowania off-line. Ponadto, wymagane
jest wcześniejsze przygotowanie neuronowego modelu obiektu regulacji.
Rys. 3. Uproszczona realizacja metody NFO
Istnieje również możliwość modyfikowania parametrów
modelu w trakcie pracy układu. Wówczas uaktualnianie wag
sieci identyfikującej obiekt regulacji odbywa się na podstawie znajomości błędu identyfikacji ef(k). Natomiast, regulator strojony jest identycznie jak w przypadku modelu
o stałych parametrach, z wykorzystaniem - propagowanej
wstecz poprzez warstwy modelu - różnicy pomiędzy modelem odniesienia a obiektem regulacji. Parametry (wagi),
zarówno modelu jak i regulatora, mogą być uaktualniane
w każdej chwili próbkowania sygnału lub każdorazowo po
przetworzeniu pewnej ilości danych. Z praktycznego punktu widzenia, korzystniejszym wydaje się prowadzenie identyfikacji neuronowej w każdym kroku próbkowania.
Natomiast parametry regulatora uaktualniane są według
wolniejszej skali czasu [2].
Model matematyczny i podstawy sterowania NFO
Model symulacyjny silnika, stworzony został w oparciu o klasyczny, dobrze znany, opis równaniami różniczkowymi w postaci wektorowej (8). Zależności (8) opisują model maszyny
\2
Parametry silnika zamieszczono w tabeli 1
Tabela 1. Parametry silnika
Rezystancja stojana
[ii]
Rs = 1,540
Rezystancja wirnika
[ii]
Rr = 1,294
Indukcyjność stojana
[H]
Ls = 0,1004
Indukcyjność wirnika
W
L r = 0,0969
Indukcyjność wzajemna
[H]
Moment bezwładności
Liczba par biegunów
Lm = 0,0915
2
(kg - m ]
J = 0,1
p= 3
Neuronowy model układu silnika indukcyjnego
w układzie NFO
Zgodnie z koncepcją adaptacyjnego sterowania z modelem odniesienia (rys. 2) wymagane jest zbudowanie odpowiedniego modelu neuronowego układu napędowego
PRZEGLĄD ELEKTROTECHNICZNY R. 80 NR 1/2004
z silnikiem indukcyjnym. Procesowi tworzenia modelu neuronowego literatura, związana z tematyką sieci neuronowych, poświęca wiele miejsca [2], [3], [4]. W prezentowanym
rozwiązaniu do modelowania silnika indukcyjnego przyjęto
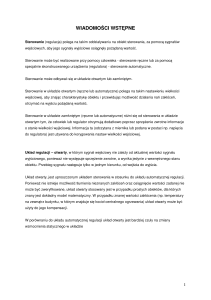
sieć neuronową typu perceptronowego, z jedną warstwą
ukrytą (4 neurony). Wszystkie elementy w warstwie ukrytej
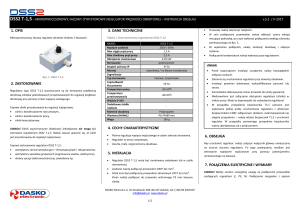
charakteryzują się nieliniową funkcją aktywacji, typu tangensoidalnego (tanh). Sieć neuronowa zawiera w sumie trzy
warstwy. Prócz wspomnianej już warstwy ukrytej wyróżniamy warstwę wejściową, w której ilość elementów narzuca
szerokość wejścia sieci (8 wejść), oraz wyjściową (jeden
neuron wyjściowy). Strukturę wewnętrzną sieci modelującej silnik indukcyjny przedstawia rysunek 4.
(10)
gdzie:
(k -
-3),
usy(k),usy(k-\),usy(k-2),usy(k-3)]
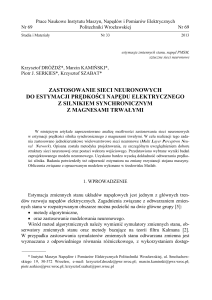
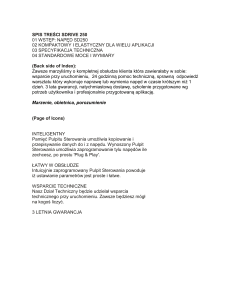
Po zakończeniu procesu uczenia i dobraniu wartości
wag należy dokonać sprawdzenia zdolności generalizujących przygotowanego modelu. Weryfikację powinno się
przeprowadzać na danych, na których sieć nie była wcześniej uczona. Wynik porównania sygnału rzeczywistej
prędkości zmierzonej na wale silnika z sygnałem wyjściowym sieci neuronowej modelującej obiekt rzeczywisty
przedstawiono powyżej.
Rysunki 5 i 6 ilustrują zachowanie się układu (silnik, przekształtnik), w przypadku różnego charakteru pobudzeń.
Model neuronowy przygotowany został w oparciu o tzw.
szeregowo-równoległy model identyfikacji [2].
[p-u.]
warstwa
wejściowa
warstwa ukryta
wyjście
Rys. 4. Wewnętrzna struktura modelu neuronowego silnika
Neuronowy model obiektu (NM) odwzorowujący nieliniową funkcję/(;, określającą zależności pomiędzy wektorem wejściowym sieci neuronowej xn(k) a jej wyjściem com(k), możemy
zapisać:
9.5
10
Rys. 6. Porównanie odpowiedzi sieci neuronowej (linia ciągła) z rzeczywistym sygnałem prędkości silnika (linia przerywana); wymuszenie o charakterze zmodulowanej sinusoidy
O
10
20
30
40
50
60
70
80
90 100
Neuronowy regulator napędu NFO
Zadaniem neuronowego regulatora (NR) jest minimalizacja uchybu regulacji e (k). Sieć neuronowa, pełniąca funkcję
regulatora, w chwili dyskretnej A, odwzorowuje zależność/^,
pomiędzy wyjściem sieci u (k) a jej wektorem wejściowym
xK(k)
(12)
10
20
30
40
50
60
70
80
90
100
Błąd odtwarzania
gdzie
(13)
(k-\),<»m(k-2).
przy czym co'^ - prędkość kątowa odniesienia
-5 ^
-10
O
10
20
30
40
50
60
czas [s]
70
80
90
100
Rys 5 Porównanie odpowiedzi sieci neuronowej (linia ciągła) z rzeczywistym sygnałem prędkości silnika (linia przerywana), wymuszenie w postaci skokowej o losowo wybieranej wartości
PRZEGLĄD ELEKTROTECHNICZNY R. 80 NR 1/2004
Dokonując rzutowania wstecz poprzez warstwy sieci
modelu uchybu e (k) wyznaczany jest wirtualny błąd eu(k)
(zgodnie z rysunkiem 2) na wyjściu regulatora (druga siec
neuronowa z jedną warstwą ukrytą o 7 węzłach typu tanh
i liniowym wyjściu - rysunek 8) Na tej podstawie wyznaczane są poprawki parametrów (wag) sieci neuroregulatora
13
1l l
Rys. 7. Struktura układu sterowania - z modelem odniesienia - napędem z silnikiem indukcyjnym, z przestrajanym „w locie" neuronowym regulatorem prędkości
Dla połączeń pomiędzy wyjściem a elementami warstwy ukrytej:
(14)
Awj
\k)=r\eu (k)y j
(k)
przy czym: Aw(R)— poprawki wag połączeń warstwy ukrytej
i wyjściowej regulatora; y(R)- wyjście warstwy ukrytej sieci regulatora;
oraz dla połączeń pomiędzy elementami warstwy ukrytej i wejściowej:
Proces regulacji rozpoczyna się od losowo wybranych
parametrów regulatora neuronowego. Ponieważ sieć neuronowa, pełniąca funkcję regulatora, w początkowym etapie pracy jest nie nauczona, wytwarza więc błędny sygnał
«y (k), sterujący badanym obiektem. W trakcie pracy następuje stopniowa zmiana wartości połączeń pomiędzy elementami sieci (jej douczanie się). Wyniki pracy układu
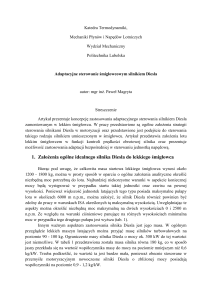
zrealizowanego w oparciu o koncepcję sterowania adaptacyjnego z modelem odniesienia, przedstawioną schematycznie na rysunku 7, zostały zamieszczone poniżej (rysunki
9-11).
(15)
[rad/s ]
co,
(16)
gdzie:<5^- błąd warstwy ukrytej regulatora; /^- wyjście warstwy wejściowej regulatora; w(R)—wagi połączeń warstwy ukrytej i wejściowej regulatora.
-20
-40
O
1
10
M
100
50
xR(k),
u (k)
warstwa ukryta
Rys. 8. Wewnętrzna struktura neuroregnlatora
14
-50
-100
CO
wejście
O
wyjście
O
1
3
4
5
6
10
czas fsl
Rys. 9. Ilustracja procesu adaptacji sieci neuronowej pełniącej funkcję regulatora
PRZEGLĄD ELEKTROTECHNICZNY R. 80 NR 1/2004
35
30
r
Inicjalizacja wag regulatora:
CO ref
r
przyjęcie stałej adaptacji wag: r\
Wprowadzenie modelu :wjj ,w\ '
l
25 H
20 L15
9.5
Odczyt: y, u;
10 10.5 11
11.5 12
12.5 13 13.5 14
14.5 15
Wyznaczenie ym
Propagacja
I
sygnału poprzez warstwy
sieci regulatora; wyznaczenie
wyjścia
dla każdej warstwy.
9.5
10
10.5 11
11.5 12
12.5 13 13.5 14
14.5 15
czas [s]
Wyznaczenie odpowiedzi
Wyznaczenie
modelu:'_
uchybu sterowania:
e(k)=ym(k)-y(k)
Rys. 10. Ilustracja „odporności" układu z rysunku 7 na zakłócenie w postaci skoku momentu obciążenia
Tak
Propagacja wstecze(k);
Wyznaczenie eu (k)
Uaktualnienie parametrów regulatora zależności:
5
czas [s]
10
15
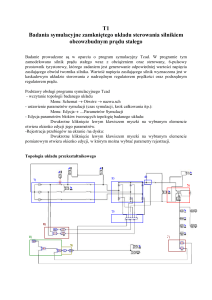
Rys. 11. Porównanie przebiegów prędkości dla różnych mechanicznych stałych czasowych (dla różnych momentów bezwładności)
wf\k +1 ) = wf 'GO+TK (k)yf\k]
Wyznaczenie sterowania w kroku następnym
Procedura regulacji
Procedurę projektową regulatora można przedstawić schematycznie w postaci schematu przepływowego.
Podsumowanie
Z punktu widzenia sterowania napędem silnika elektrycznego, w większości przypadków napotykamy problemy związane z istnieniem nieliniowych zjawisk (choćby
tarcie).
Często teoria sterowania, dobrze znana dla układów
liniowych, okazuje się niewystarczająca, bądź też wymaga zbyt dużych nakładów obliczeniowych. W takim przypadku układ sieci neuronowej o łatwo przestrajalnych
parametrach może być rozwiązaniem alternatywnym.
Zadowalające jest, że sieć o prostej strukturze, opartej
na sieci typu perceptronowego, dobrze dostosowuje swoje parametry do wymogów sytuacji. Wykorzystując jedynie prosty algorytm uczenia. Wadą i siłą, jednocześnie,
prezentowanego rozwiązania jest konieczność budowy
(treningu) neuronowego modelu sterowanego procesu.
Wadą - ponieważ konieczne jest powołanie do życia dodatkowej siatki neuronowej. Zaletą - gdyż dzięki tej właśnie dodatkowej sieci w łatwy sposób możemy
transportować uchyb regulacji i wykorzystać go w procesie strojenia regulatora.
PRZEGLĄD ELEKTROTECHNICZNY R. 80 NR 1/2004
Rys. 12. Procedura projektowa
LITERATURA
[1] A s t r o m K. J., W i t t e n m a r k B.: Adaptive Control, 2nd
ed., Addison Wesley (1995)
[ 2 ] K o r b i c z J . , O b u c h o w i c z A . , U c i ń s k i D . : Sztuczne
sieci neuronowe, podstawy i zastosowania, PLJ, Warszawa
(1994)
[3]Norgaard M., Ravn O., Poulsen N.K., Hansen
L. K.: Neural Networks for Modelling and Control of Dynamie
Systems, Springer, (2000)
[ 4 ] N o r g a a r d M.: Neural NetworkBased Control System Design
TOOLKIT, v.1.0, Technical Report 96-E-830
[5] N o r g aa r d M.: Neural Network Based System Identification
TOOLBOX, v.1.1, Technical Report 97-E-851
[6] B r z ó z k a J.: Regulatory cyfrowe w automatyce, MIKOM Warszawa (2002)
[ 7 ] B e l i c z y ń s k i B., K o z i ń s k i W.: Wprowadzenie do regulacji cyfrowej, WPW Warszawa, 1987
[8]Hagan M. T., M e n h a j M. B.: Training Feedforward
Networks with the Marquardt Algorytm, IEEE Trans, on Neural
Networks, Vol. 5 (1994), n. 6, 989-993
15
[ 9 ] K a ź m i e r k o w s k i M., Tunia H.: Automatyka napędu przekształtnikowego- PWN, Warszawa, 1987
[ 1 0 ] N i e d e r l i ń s k i A., M o ś c i ń s k i J., O g o n o w s k i Z.: Regulacja adaptacyjna, PWN, Warszawa 1995
[ 1 1 ] T a d e u s i e w i c z R.: Sieci neuronowe, WNT, Warszawa 1993
[12]Osowski S.: Sieci neuronowe do przetwarzania informacji,
OWPW Warszawa 2000
[13]Leonhard W.: Control of Electrical Drives, Sprigner Verlag
1985
[14]Jonsson R., L e o n h a r d W.: Control of an Induction Motor without a Mechanical Sensor, based on the Pnncipie of „Natural Field Orientation" (NFO), IPEC Yokohama 1995
Autorzy: dr hab. inż. Lech M. Grzesiak, Politechnika Warszawska,
Instytut Sterowania i Elektroniki Przemysłowej, ul. Koszykowa 75,
60-965 Warszawa, e-mail: [email protected]; mgr inż. Dariusz Wyszomierski, Politechnika Warszawska, Instytut Sterowania i Elektroniki Przemysłowej, ul. Koszykowa 75, 00-062 Warszawa,
e-mail: [email protected]. edu.pl
Dariusz L. SOBCZUK
Politechnika Warszawska, Instytut Sterowania i Elektroniki Przemysłowej
Neuronowy estymator prędkości dla silnika indukcyjnego
sterowanego wektorowo
Streszczenie. Artykuł przedstawia sposób implementacji bezczujnikowego napędu indukcyjnego ze sterowaniem wektorowym przy użyciu neuronowego
estymatora prędkości. W artykule opisane są podstawy sterowania zorientowanego połowo (ang. Field Oriented Control - FOC). Dyskutowana jest
również nowa metoda estymacji prędkości. Opisano też implementacje układu na podstawie systemu bazującego na procesorze sygnałowym (ang.
Digital Signal Processor-DSP) TMS320C31.
Abstract. (Neural Network speed estimator for vector controlled induction motor drive). This paper presents the implementation of speed
sensorless vector controlled induction motor with on-/ine trained neural network (NN) working as speed estimator, The theoretical principles of Field
Oriented Control arę given. The novel speed estimation method is discussed. The implementation of the system based on Digital Signal Processor
(DSP) TMS320C31 is described.
Słowa kluczowe: silniki indukcyjne, sterowanie wektorowe, obserwalory prędkości, sztuczne sieci neuronowe.
Keywords: induction motor, vector control, neural networ.
Wstęp
Silniki indukcyjne ze względu na ich dobrze znane zalety,
takie jak prostota konstrukcji, niezawodność oraz niska cena,
znalazły w ostatnich czasach szerokie zastosowanie w przemyśle. Poza tym, w przeciwieństwie do komutatorowych silników prądu stałego, mogą pracować w trudnych warunkach
atmosferycznych, ponieważ nie iskrzą i nie ulegają korozji.
Wykorzystując powyższe zalety silników indukcyjnych trzeba
jednak pamiętać, że koszt, jaki ponosimy używając ich, to konieczność stosowania bardziej złożonych metod sterowania.
Spowodowane jest to zasadniczo trzema podstawowymi przyczynami:
a) silnik indukcyjny jest wielowymiarowym nieliniowym układem dynamicznym z wewnętrznym sprzężeniem,
b) pewne zmienne stanu, takie jak prądy wirnika i strumienie
magnetyczne nie są bezpośrednio mierzalne,
c) rezystancja wirnika (z powodu nagrzewania) oraz indukcja
magnetyczna (z powodu nasycenia) zmieniają się i w znaczny sposób wpływają na dynamikę układu.
Dlatego we wczesnych latach 70. poza prostym sterowaniem skalarnym rozwinięto bardziej skomplikowaną metodę wektorową. Metoda zorientowana połowo (ang. Field Oriented Control-FOC) została zaproponowana mniej więcej w tym
samym czasie przez Hasse i Blaschke [3,7]. W podejściu tym
równania silnika są przekształcone do układu wirującego zgodnie z wektorem strumienia wirnika. Przekształcenie to odpowiada odsprzężonemu wytwarzaniu momentu elektromagnetycznego w obcowzbudnym silniku prądu stałego. Należy powiedzieć, że wadą tego układu jest jego złożoność. Konieczne
jest stworzenie estymatorów lub obserwatorów strumienia i momentu, skonstruowanie dwóch regulatorów prądu oraz dokonanie transformacji współrzędnych do układu zorientowanego
połowo. Obecnie, dzięki możliwości implementacji przy wykorzystaniu mikrokontrolerów oraz procesorów sygnałowych, sterowanie napędami indukcyjnymi osiągnęło status dojrzałej
16
i nowoczesnej technologii w szerokiej gamie zastosowań, poczynając od systemów tanich, lecz o gorszych własnościach dynamicznych, a kończąc nadrogich, ale o bardzo wysokiej jakości
sterowania. Należy zaznaczyć, że ostatnio wiele badań koncentruje się na eliminacji pomiaru prędkości mechanicznej, przy zachowaniu dobrych własności statycznych i dynamicznych układu
sterowania silnika.
Zaletami napędów bez czujnika prędkości są:
- niższy koszt napędu,
- zredukowane rozmiary całego zestawu,
-wyeliminowanie kabla pomiarowego,
-większa niezawodność.
W ostatnich latach zostało rozwiniętych wiele metod w celu wyeliminowania czujnika prędkości, ponieważ w wielu zastosowaniach przemysłowych użycie czujników prędkości jest
niepożądane lub wręcz niemożliwe. Metody bezczujnikowe
można zasadniczo podzielić na dwie grupy: bezczujnikowe sterowanie prędkości w pętli zamkniętej, gdzie prędkość wyznaczana jest z innych wartości mierzalnych, takich jak napięcie
i prąd stojana, oraz sterowanie prędkości w pętli otwartej z kompensacją poślizgu, gdzie steruje się prędkością synchroniczną,
a efekt zmiany momentu obciążenia jest tylko kompensowany.
Rozprawa dotyczy zastosowania sieci neuronowych do rozwiązania nakreślonych powyżej problemów, a w szczególności konstrukcji regulatorów prądu oraz estymatora prędkości
mechanicznej. Celem tej pracy jest zaprezentowanie układu
zamkniętego sterowania i przedstawienie wyników eksperymentalnych w tym układzie.
Rozwiązania uzyskano na drodze kompleksowych badań,
poczynając od symulacji komputerowych, poprzez budowę
stanowiska eksperymentalnego, aż do przeprowadzenia badań eksperymentalnych na stanowisku opartych na procesorze sygnałowym TMS320C31. Należy przy tym zauważyć,
że sterowanie połowo zorientowane bez czujnika prędkości
może być użyte do wysokiej klasy napędów dla pojazdów elek'RZEGLĄD ELEKTROTECHNICZNY R. 80 NR 1/2004