STEROWNIK 1-FAZOWY.doc
(2444 KB) Pobierz
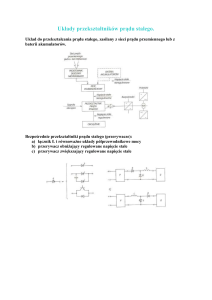
Jednofazowe sterowniki napięcia przemiennego
Wiadomości podstawowe.
Sterowniki półprzewodnikowe napięcia przemiennego służą do płynnej regulacji wartości
skutecznej napięcia, a w konsekwencji – wartości skutecznej prądu i mocy czynnej odbiornika.
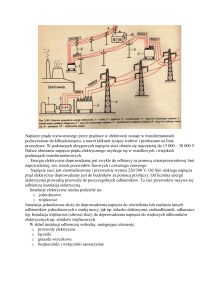
Regulacja napięcia w układach ze sterownikami prądu przemiennego jest związana z okresowym
dołączaniem do odbiornika napięcia przemiennego linii zasilającej. Łącznikami są najczęściej
tyrystory. Najczęściej stosuje się tzw. sterowanie symetryczne . Jest to takie sterowanie, przy
którym prąd obciążenia nie zawiera składowej stałej. Z tego względu łączniki tyrystorowe muszą
zapewniać dwukierunkowy przepływ prądu, a momenty włączenia muszą być synchronizowane z
przebiegiem napięcia zasilającego. Nieliniowe charakterystyki łączników są przyczyną znacznych
odkształceń przebiegów napięć i prądów w sterowniku. W przebiegach wyjściowych mogą
wystąpić zarówno wyższe, jak i niższe harmoniczne napięcia zasilania, przy czym krotność
harmonicznych zależy od częstotliwości łączeń. W praktyce, do sterowania prądu przemiennego
stosuje się tyrystory symetryczne (triaki), tyrystory o połączeniu odwrotnie-równoległym lub
układy diodowo-tyrystorowe. Podstawowe schematy sterowników jednofazowych oraz zależności
pomiędzy prądami wyjściowymi a prądami w elementach zestawiono w tablicy 4.1
Tablica 4.1 Układy sterowników jednofazowych
Lp
Schemat
Wartość średnia prądu
1
Wartość skuteczna prądu
2
3
;
;
4
Układy odwrotnie równoległe (tab. 4.1, p.2) są rozpowszechnioną odmianą sterownika. Przy
obciążeniu z indukcyjnością tyrystory wymagają wzmocnionej ochrony przepięciowej. Ze
względu na różne potencjały katod układy wyzwalania obu tyrystorów muszą być odizolowane
galwanicznie.
Sterowniki w układzie mostkowym są stosowane do zasilania odbiorników małej mocy rzędu
1kW. Spotyka się dwie wersje tego układu: z jednym tyrystorem w przekątnej mostka diodowego
(tab. 4.1, p.3) oraz z dwoma tyrystorami w ramionach mostka (tab. 4.1 p. 4). W pierwszej prąd
obciążenia przepływa przez tyrystor w obu półokresach napięcia zasilania, stąd obciążenie
prądowe tyrystora jest dwukrotnie większe w porównaniu z układem odwrotnie równoległym.
Tyrystor wyłącza się przy końcu każdego półokresu, gdy jego prąd przewodzenia zmniejszy się
poniżej prądu podtrzymania – jest to więc wydłużone wyłączanie przez zanik prądu. Zaletami
układu są: tylko jeden tyrystor – a tym samym prostszy układ jego wyzwalania, niewystępowanie
(praktycznie) napięcia wstecznego na tyrystorze (bocznikowanym przez odnośną diodę mostka),
wskutek czego ochrona przepięciowa jest zbędna, oraz lepsze wykorzystanie prądowe tyrystora
(mniejszy współczynnik kształtu przewodzonego prądu). Wadą są zwiększone straty mocy
(jednocześnie przewodzą trzy zawory) obniżające współczynnik sprawności i ograniczające
zakres stosowanych mocy. W wersji sterownika z tab 2.1, Lp.4 obciążenie prądowe tyrystora jest
takie samo jak w układzie odwrotnie równoległym. Wspólny potencjał katod upraszcza układ
wyzwalania tyrystorów (zbędna izolacja galwaniczna). Układ zalecany jest także do odbiorników
z przepięciami łączeniowymi, ponieważ tyrystory chronione są przez bocznikujące je diody
mostka. Straty mocy są również większe niż w układzie odwrotnie równoległym.
Sterownik z tyrystorem symetrycznym (tab.2.1 Lp.1) ma prostszy zarówno obwód główny
(tylko jeden zawór), jak i układ wyzwalania, a także mniejsze wymiary i masę. Jest obecnie
układem najczęściej stosowanym w zakresie od najmniejszych do dużych wartości mocy. Należy
jednak pamiętać,
że tyrystory symetryczne charakteryzują się – w porównaniu z
jednokierunkowymi – znacznie mniejszymi wartościami krytycznymi stromości narastania
napięcia blokowania
i prądu przewodzenia
, stąd konieczność stosowania
zabezpieczeń stromościowych odpowiednich do zasilanych odbiorników.
Sposoby regulacji mocy z wykorzystaniem sterowników.
Podstawowe właściwości regulacyjne i energetyczne sterowników, określające ich
zastosowania, zależą głównie od sposobu sterowania zaworów. Stosuje się trzy sposoby
wyzwalania tyrystorów w sterownikach ( sterowanie fazowe, impulsowe oraz kluczowe).
a) Sterowanie fazowe ( w sterownikach do płynnej zmiany napięcia odbiornika) – polega na
zmianie fazy impulsów wyzwalających względem napięcia anodowego tyrystora. Może
być realizowane jako symetryczne lub niesymetryczne.
Rys 4.1 Sposoby sterowania fazowego: a, b, c) symetryczne, d) wielokrotne sterowanie
symetryczne, e) odwrotnie symetryczne (t )
Sterowanie symetryczne, gdy α = α ; składowa stała napięcia wyjściowego w okresie jest równa
zero (U = 0). Stan taki można osiągnąć przez:
z1
d
z2
-
-
zmianę tylko kąta załączania (rys 4.1a); przy obciążeniu R prąd obciążenia (harmoniczna
podstawowa) opóźnia się względem napięcia sieci; układ sterownik-odbiornik ma
charakter indukcyjny tj. cos φind.
zmianę tylko kąta wyłączenia (rys 4.1b); przy obciążeniu R prąd sieci wyprzedza napięcie
sieci; układ ma charakter pojemnościowy, tj. cos φpoj.
jednoczesną zmianę obu kątów, tj. dwustronne, symetryczne „obcinanie” sinusoidy
napięcia zasilającego (rys 4.1c); przy obciążeniu R prąd sieci jest w fazie z napięciem sieci,
czyli cosφ=1.
Symetryczne sterowanie fazowe jest stosowane głównie w elektrotermii (do regulacji
temperatury oporowych urządzeń grzejnych), w technice oświetlenia (do regulacji natężenia
oświetlenia źródeł światła: żarowych, rtęciowych, halogenowych) oraz w napędzie elektrycznym
(do napięciowej regulacji prędkości obrotowej silników indukcyjnych: klatkowych i częściej –
pierścieniowych).
Sterowanie niesymetryczne, gdy αz1≠αz2 (nie realizowalne w układach mostkowym i z
triakiem). Składowa stała napięcia wyjściowego jest – w ogólnym przypadku – różna od zera
(Ud≠0). Szczególnym przypadkiem takiego sterowania jest sterowanie tzw. odwrotnie
symetryczne (skośno-symetryczne) wg zależności α = π-α (rys 4.1e). Bywa ono stosowane w
napędach nadążnych z silnikami prądu stałego.
z1
z2
b) Sterowanie integracyjne (rys.4.2) zwane także impulsowym, w którym napięcie wyjściowe
jest ciągiem kolejnych pełnych okresów TL napięcia zasilającego o czasie trwania ti = l .TL
(gdzie l = 0,1,2,3...k) oraz przerw Ti-ti przy stałym okresie impulsowania Ti = k . TL = const.
Regulacja napięcia jest wielostopniowa o liczbie stopni k. Wartości skuteczne napięcia
wyjściowego i prądu obciążenia są funkcjami współczynnika wypełnienia impulsu δi=l/k.
Ponieważ δi zmienia się dyskretnie w funkcji parametru sterującego, to zależności U=f(δi),
I=f(δi) są krzywymi schodkowymi. W sterowaniu impulsowym załączanie tyrystorów jest
synchroniczne, tj. następuje w chwilach przejścia prądu przez zero.
Rysunek 4.2 Przebiegi napięcia podczas sterowania impulsowego (t ).
Wartość skuteczną ( w okresie Ti) ciągu sinusoid (impulsu) napięcia wyjściowego wyraża
zależność 4.1 [27]:
,
(4.1)
natomiast wartość skuteczną ciągu sinusoid prądu obciążenia zależność 4.2:
.
(4.2)
Przy założeniu nieodkształconego napięcia sieci (UL=UL1) moc czynna układu sterownikodbiornik jest kształtowana tylko przez harmoniczną podstawową prądu:
P (δi) = ULIL1cosφ1
(4.3)
Harmoniczna podstawowa ciągu sinusoid prądu, wyrażona zależnością 4.4:
i1=ILm δisinωt
(4.4)
jest zawsze w fazie z przebiegiem ciągu sinusoid, niezależnie od wartości współczynnika δi.
Zatem przesunięcie(opóźnienie) podstawowej harmonicznej prądu względem napięcia sieci przy
sterowaniu impulsowym jest stałe, niezależne od wysterowania[10]:
φ = φ = const.
1
Po uwzględnieniu warunku (4.5) wyrażenie (4.3) przyjmuje postać:
P(δi) = ULIL δi cosφ
Analogicznie moc bierną ciągu sinusoid wyraża wzór:
(4.5)
(4.6)
QL(δi) = ULIL δi sinφ
(4.7)
Stała wartość kąta fazowego (zal. 4.5) sprawia, że moc bierna związana z przesunięciem jest stała.
Stąd całkowita moc bierna QL(δi) przy obciążeniu R jest równa zero, a przy obciążeniu RL maleje
liniowo ze zmniejszaniem δi tylko wskutek zmniejszania amplitudy podstawowej harmonicznej
prądu.
Moc pozorna pobierana z sieci:
(4.8)
Współczynnik mocy po pominięciu strat mocy w sterowniku, czyli dla P(δi)=PL(δi) wyraża wzór:
(4.9)
Współczynnik sprawności nie zależy od współczynnika wypełnienia δi:
(4.10)
Podstawową zaletą sterowania impulsowego jest stała moc bierna związana z przesunięciem
prądu, zależna tylko od L/R odbiornika, a niezależna od wysterowania sterownika. Kolejną zaletą
jest brak harmonicznych wyższych rzędów w prądzie obciążenia (występują tylko
podharmoniczne i harmoniczne ułamkowe niskich rzędów). Przy tego rodzaju sterowania, nawet
przy obciążeniu rezystancyjnym nie występują duże stromości narastania prądu, dzięki czemu nie
są praktycznie generowane zakłócenia elektromagnetyczne.
c) Sterowanie kluczowe, w którym sterownik pracuje jako łącznik prądu przemiennego w
dwóch stanach pracy: wyłączenia i załączenia. Stanowi wyłączenia odpowiada brak
impulsów wyzwalających, natomiast w stanie załączenia zawory są w pełni wysterowane
(α = φ) i przez łącznik przepływa prąd sinusoidalny. Wyłączenie przewodzących zaworów
zgr
zachodzi w sposób naturalny (tj. w chwili przejścia prądu przez zero) z pewnym
opóźnieniem Δtw względem chwili tw zaniku impulsu wyzwalającego. W łącznikach nie
ma więc regulacji kąta załączenia, stąd układ wyzwalania zaworów jest znacznie prostszy.
W rozwiązaniach najprostszych można stosować ciągły impuls wyzwalający.
Korzystniejszy jednak, ze względu na mniejsze straty mocy w obwodzie bramki, jest ciąg
impulsów o czasie trwania δi≥π-α
.
zgr
Sterownik jednofazowy prądu przemiennego zasilający odbiornik czysto rezystancyjny.
Schemat sterownika jednofazowego prądu przemiennego zasilającego odbiornik czysto
rezystancyjny liniowy przedstawiono na rys. 2.1.1.1
Rys.4.3 Jednofazowy
rezystancyjny.
sterownik
prądu
przemiennego
zasilający
odbiornik
czysto
Jest tu zastosowany układ odwrotnie równoległy dwóch tyrystorów T1 i T2, które są sterowane
symetrycznie. Oznacza to, że impulsy bramkowe tyrystorów są przesunięte w fazie o kąt 180°.
Przebiegi czasowe napięcia i prądu odbiornika, n...
Plik z chomika:
NIKO_O
Inne pliki z tego folderu:
BEZPOŚREDNI POWIELACZ CZĘSTOTLIWOŚCI.doc (996 KB)
Energoelektronika - Podstawy i wybrane zastosowania.pdf (110537 KB)
FALOWNIK MSI 1- I 3-FAZOWY.doc (2359 KB)
FALOWNIKI_ PODZIAŁ, PODST UKŁADY.doc (1249 KB)
NEG ODDZ CZ 1 -MOCE _HARMONICZNE W ŚROD PRZEBIEGÓW ODKSZT.doc
(1700 KB)
Inne foldery tego chomika:
energoelektronika1
Zgłoś jeśli naruszono regulamin
Strona główna
Aktualności
Kontakt
Dział Pomocy
Opinie
Regulamin serwisu
Polityka prywatności
Copyright © 2012 Chomikuj.pl