Komórkowy model sterowania
ruchem pojazdów w sieci ulic.
Autor:
Maciej Krysztofiak
Promotor: dr inż. Mariusz Kaczmarek
Seminarium 2004 – PP, SKiSR
1
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Plan prezentacji:
1.
Wprowadzenie
2.
Cel pracy
3.
Podsumowanie
Seminarium 2004 – PP, SKiSR
2
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Wprowadzenie
Sygnalizacja świetlna w ruchu ulicznym
jest podstawowym elementem sterowania
siecią transportową. Okazuje się jednak, że
nawet w krajach silnie rozwiniętych, jak np.
Stany Zjednoczone lub Japonia, korzyści
wynikające
z
zastosowania sygnalizacji
świetlnej nie są nigdy w pełni osiągane.
Dlatego też na całym świecie prowadzi się
badania nad programem Inteligentnego
Systemu
Transportu
(ang.
Intelligent
Transportation System, ITS), w którym
sterowanie ruchem ulicznym jest jednym z
priorytetów.
Seminarium 2004 – PP, SKiSR
3
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Cel pracy
●
Implementacja algorytmu
●
Wizualizacja modelu
●
Program do tworzenia symulacji
Seminarium 2004 – PP, SKiSR
4
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Model sterowania
Wzrost natężenia ruchu pojazdów w
centrach aglomeracji miejskich ogranicza
możliwość sterowania i zarządzania ruchem
w
obrębie
skrzyżowań,
powodując
pogorszenie warunków ruchu.
Informatyka oraz wdrażanie nowych
metod badawczych daje nowe możliwości
analizy strumieni pojazdów.
Stosuje się w tych celach modele
sterowani ruchem pojazdów. Jednym z nich
jest makrokomórkowy model Nagela –
Schreckenberga.
Seminarium 2004 – PP, SKiSR
5
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Model komórkowy
Automat
komórkowy
(ang.
Cellular
Automaton, CA) stosuje się m. in. przy
modelowaniu miejskiego ruchu ulicznego, w
którym skrzyżowania rozpatruje się jako
drogi o ruchu okrężnym (rondo). Takie
podejście
upraszcza
implementację
numeryczną
oraz
pozwala
modelować
zjawiska na komputerach.
W modelu CA pojazdy poruszają się z
prędkością 0 lub 1.
Rozważając układ sąsiednich komórek
reprezentujących ulicę, po której poruszają
się pojazdy można wyprowadzić regułę
przemieszczania:
ni (t 1) niin (t )(1 ni (t )) ni (t )niout (t )
Seminarium 2004 – PP, SKiSR
6
Komórkowy model sterowania ruchem pojazdów w sieci ulic
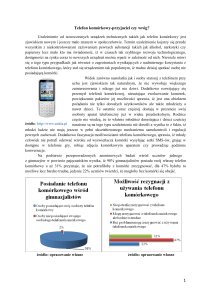
Model komórkowy (2)
ni (t 1) niin (t )(1 ni (t )) ni (t )niout (t )
gdzie ni(t) oznacza zajętość
komórki:
- 0 – komórka wolna,
- 1 – komórka zawiera pojazd),
- natomiast n in(t) i n out(t)
i
i
reprezentują odpowiednio
stany komórek poprzedniej i
następnej,
Jasnoszare komórki oznaczają ulice
dojazdowe,
natomiast białe i ciemnoszare komórki
to ulice wyjazdowe.
Seminarium 2004 – PP, SKiSR
7
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Model Nagela – Schreckenberga
Zastosowanie
metody
modelowania
strumieni pojazdów za pomocą automatów
komórkowych pozwala uprościć procedury
sterowania ruchem drogowym.
W 1992r. przedstawiony przez Nagela i
Schreckenberga
automat
komórkowy
opisujący jednopasmowy ruch pojazdów
okazał się polem doświadczalnym do
testowania różnych scenariuszy w ruchu
drogowym.
Seminarium 2004 – PP, SKiSR
8
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Model Nagela – Schreckenberga
●
●
●
●
●
podział ulicy na komórki kilkumetrowe
prędkość pojazdów 0 - ustalonej maksymalnej prędkości
prędkość to liczba komórek przebyta przez pojazd w
jednostce czasu
przyspieszanie – jeśli vi jest mniejsza od vmax i jeśli
występuje luka mi ędzy pojazdami, to prędkość zwiększana
jest o 1
zwalnianie – jeśli pojazd w komórce i widzi pojazd w
komórce i+j, to zmniejsza prędkość do wartości j-1
Seminarium 2004 – PP, SKiSR
9
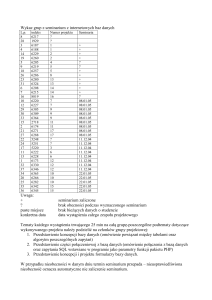
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Model Nagela – Schreckenberga (3)
„Makrokomórkowość”
ni(t+i) = ni(t) + fi(t) – fi+1(t)
gdzie:
ni(t+i) – to stan następnej komórki
ni(t) – aktualny stan komórki i-tej w
czasie t
fi(t) – strumień napływający do komórki itej
fi+1 (t) – strumień odpływający z komórki
i-tej
Seminarium 2004 – PP, SKiSR
10
Komórkowy model sterowania ruchem pojazdów w sieci ulic
11
Komórkowy model sterowania ruchem pojazdów w sieci ulic
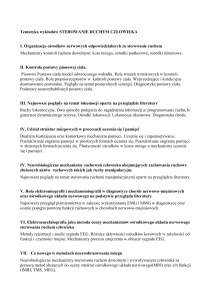
Podsumowanie
:
Makrokomórkowy symulator
zarządzania
potokami pojazdów realizuje następujące
funkcje:
● Projektowanie dowolnej konfiguracji sieci
● Obliczanie mierników efektywności ruchu
(średni czas przejazdu, średni pokonany
dystans)
● Animacje obrazującą zmianę sytuacji w
zaprojektowanej sieci
● Sporządzanie wykresów
● Określanie parametrów symulacji (czas
trwania symulacji, liczba generowanych
pojazdów)
Seminarium 2004 – PP, SKiSR
12
Komórkowy model sterowania ruchem pojazdów w sieci ulic
Literatura:
1.
3.
Materiały III Konferencji Naukowo-Technicznej pt.:
„Telematyka i bezpieczeństwo ruchu drogowego”,
Politechnika Śląska, Katowice, 2003
„Sterowanie ruchem pojazdów w sieci ulic z
wykorzystaniem modelu komórkowego” - praca
dyplomowa magisterska
M. Nawrocki, P. Przedwojski
Seminarium 2004 – PP, SKiSR
13