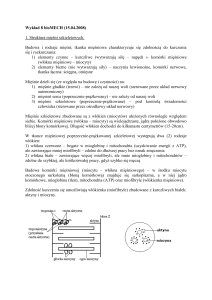
Organy motoryczne - efektory
gruczoł łojowy
komórki barwnikowe
komórka parzydełkowa
Jednostka motoryczna
Jednostka motoryczna składa się z motoneuronu i włókien mięśniowych, unerwianych
przez ten motoneuron. Aksony motoneuronów wychodzą z jąder motorycznych w rdzeniu
kręgowym i dochodzą do mięsni tworząc synapsy nerwowo - mięśniowe. Rolą układu
nerwowego jest jednoczesna kontrola wszystkich włókien, we wszystkich mięśniach, tak
by uzyskać właściwe napięcie mięśni służące poruszaniu elementów szkieletu.
Mięśnie szkieletowe
Mięśnie szkieletowe składają się z pęczków włókien mięśniowych. Włókno mięśniowe zbudowane jest z
włókienek kurczliwych, nazywanych miofibrylami. Typowy mięsień składa się 105 – 106 włókien
mięśniowych ułożonych równolegle, a w dłuższych mięśniach, również szeregowo.
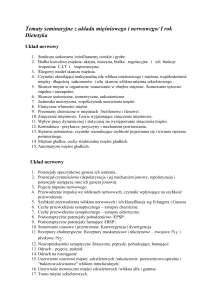
Poziomy organizacji mięśnia szkieletowego
Struktury włókna mięśniowego: miofibryle, błona
komórkowa (sarkolemma), retikulum sarkoplazmatyczne
(siateczka sarkoplazmatyczna), kanały poprzeczne (T),
mitochondria. Komórka zawiera również kilkanaście
jąder (gdyż komórki mięśni wytworzyły się ewolucyjnie z
przyłączenia wielu komórek).
Jednostką tworzącą miofibryle są sakromery. Składają się
one z cienkich i grubych filamentów. Sarkomery
oddzielone są tzw. dyskami Z, do których, z obu stron
przyczepione są cienkie filamenty. Cienki i gruby filament
zachodzą na siebie, tworząc ciemne i jasne pasma
widoczne w postaci prążków. Podczas skurczu lub
rozkurczu mięśnia, zmienia się stopień zachodzenia na
siebie cienkiego i grubego filamentu.
Cienki i gruby filament składają się ze
spolimeryzowanych białek. Cienki filament składa się z
aktyny oraz białek - troponiny i tropomiozyny. Gruby
filament składa się z włókien miozyny
Mechanizm skurczu sarkomeru - teoria
ślizgowa
W wyniku oddziaływania włókien miozyny i aktyny, powstaje siła skierowana równolegle do osi
włókien, powodująca przesuwanie się wzajemne włókna miozynowgo i aktynowego względem
siebie. Proces wzajemnego przesuwania się włókna składa się z powstawania szeregu połączeń
pomiędzy miozyną a aktyną poprzez mostki, rozluźniania ich i tworzenia następnych połączeń
przesuniętych względem poprzednich. (‘Sliding filament hypothesis‘ - A. Huxley i kol. (1950) )
Gruby filament - cząsteczka miozyny
Cząsteczka miozyny składa się z kulistej główki,
zawiasu i giętkiej nici. Kulista główka zawiera
obszar, który może przyłączać i rozszczepiać ATP.
W wyniku hydrolizy ATP, powstaje ADP i anion
fosforanowy, a uzyskana energia jest przenoszona
na cząsteczkę miozyny i powoduje obrót główki na
zawiasie i przejście w stany wysokoenergetyczny.
Energia, w postaci cząsteczek ATP, wytwarzana jest
w mitochondriach w szeregu reakcji
biochemicznych zwanych cyklem Krebsa albo
poprzez beztlenowy rozkład cukrów w płynie
wewnątrzkomórkowym.
Cienki filament - cząsteczka aktyny
Cienkie filamenty zawierają aktynę, troponinę i tropomiozynę. Aktyna jest kulistym białkiem
tworzącym długie łańcuchy. Każda cząsteczka aktyny w łańcuchu zawiera miejsce wiązania
ze specyficznym miejscem na główce miozyny. Stwarza to warunki do tworzenia mostków
poprzecznych.
Skurcz mięśnia – mechanizm ślizgu
Skurcz jest spowodowany przesuwaniem się cienkiego filamentu wzdłuż grubego filamentu.
1. Podczas aktywacji włókna mięśniowego, uwolniony wapń przyłącza się do troponiny powodują ekspozycję miejsc
wiązania. Przyłączona główka miozyny tworzy połączenie pomiędzy cienkim i grubym filamentem.
2. Przyłączona główka miozyny wykonuje obrót i wywiera siłę wzdłuż osi filamentu. Powoduje to wzajemne
nasuwanie się cienkiego i grubego filamentu.
3. Nowa cząsteczka ATP łączy się z miozyną, co indukuje przerwanie wiązania pomiędzy aktyną i miozyną.
4. Energia chemiczna uwolniona z ATP, powoduje przeciwny obrót główki, która staje się gotowa do kolejnego
przyłączenia w następnym miejscu wiązania.
Skurcz mięśnia – mechanizm ślizgu
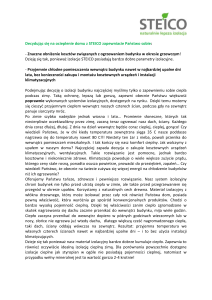
Zależność siły skurczu od długości mięśnia
Siła skurczu mięśnia zależy od stopnia zachodzenia na siebie cienkiego i grubego filamentu. a –
brak zachodzenia. a-b – liniowy wzrost związany ze wzrostem ilości połączeń, b-c – w okolicy
optymalnej długości mięśnia (L0), siła jest stała ze względu na brak główek miozyny w
środkowej części filamentu. c-d – siła zaczyna się zmniejszać w wyniku pokrywania się
cienkich filamentów. d-e – przy małych długościach grube filamenty wytwarzają sprężystą siłę
odpychającą. Siła pasywna istnieje bez względu na aktywacje i jest związana ze sprężystymi
własnościami grubego filamentu (mięsień w stanie rozkurczu można porównać do rozciągniętej
sprężyny, a w stanie maksymalnego skurczu, do ściśniętej sprężyny). Siła całkowita jest sumą
siły pasywnej i aktywnej.
Złącze nerwowo – mięśniowe i sprzężenie
elektromechaniczne
Rozgałęzienia motoneuronu tworzą połączenia
synaptyczne z pojedynczymi włóknami
mięśniowymi. Każde złącze, tzw. płytka
końcowa, składa się z: zakończeń włókna
nerwowego skąd uwalniana jest acetylocholina
(ACh) do szczeliny synaptycznej i obszaru
postsynaptycznego zawierającego receptory
acetylocholiny.
Złącze nerwowo – mięśniowe i sprzężenie
elektromechaniczne
Spontaniczne uwolnienie kwantu acetylocholiny (ACh) powoduje depolaryzacje na płytce końcowej (mEPP ~ 0.4
mV). Pojawienie się potencjału czynnościowego na zakończeniu motoneuronu uwalnia 200-300 kwantów,
powoduje depolaryzacje o ok. 70 mV (EPP), która wywołuje sodowy potencjał czynnościowy rozchodzący się w
obie strony po błonie włókna mięśniowego. Acetylocholina jest szybko hydrolizowana, co pozwala na wywołanie
kolejnej reakcji włókna w odpowiedzi na potencjał czynnościowy motoneuronu.
Złącze nerwowo – mięśniowe i sprzężenie
elektromechaniczne
Podczas propagacji potencjału czynnościowego po błonie komórki mięśniowej, następuje depolaryzacja kanałów
poprzecznych (T). Do każdej cewki przylega para zbiorników brzeżnych, będących częścią siateczki
sarkoplazmatycznej (Sacrolemma, SR). Zbiorniki zawierają jony Ca2+ o dużym stężeniu. Zmiana napięcia uwalnia
jony Ca2+ (mechanizm nie do końca wyjaśniony) z SR do cytoplazmy. Wapń przyłącza się do troponiny, co powoduje
ekspozycje miejsc wiązania aktyny z miozyną i umozliwa skurcz mięśnia. Po zakończeniu potencjału
czynnościowego, jony Ca2+ są aktywnie transportowane do zbiorników.
Złącze nerwowo – mięśniowe i sprzężenie
elektromechaniczne
Rodzaje mięśni szkieletowych
Rodzaje mięśni szkieletowych czerwone, jasnoczerwone i białe
I
II A
II B
Rodzaje mięśni szkieletowych własności
Metabolizm w mięśniach
Anerobowy:
glukoza (6C) + 2ADP + 2Pi = 2ATP + 2 kwas mlekowy (3C) + ciepło
•Może się odbywać bez tlenu
•Mało wydajny (1 cząsteczka glukozy daje 2ATP)
•Szybka produkcja ATP.
•Kwas mlekowy wpływa negatywnie na działanie komórki
•Pi – fosforan nieorganiczny
Aerobowy:
glukoza (6C) + tlen + 36ADP + 36Pi = 36ATP + 6CO2 (1C) + ciepło + woda
•Nie może się odbywać bez tlenu
•Wydajny (1 cząsteczka glukozy daje 36 ATP)
•Wolna produkcja ATP (dłuższy cykl).
•Nie ma metabolicznych produktów odpadu
•Pi – fosforan nieorganiczny
Mięśnie a sport
U człowieka w mięśniach lokomocyjnych występuje średnio 50% włókien szybkich i 50% włókien
wolnych.
U mistrza olimpijskiego w sprincie - ok. 80% włókien szybkich.
U maratończyka - ok. 80% włókien wolnych.
Długotrwały trening wytrzymałościowy może funkcjonalnie zmienić szybkie włókna we włókna
pośrednie.
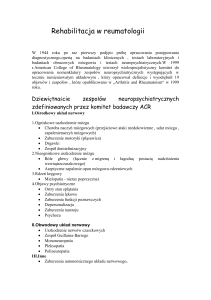
mężczyźni
kobiety
t d n n 1.1
u d / t t b
bieganie
pływanie
b 1 1/ n
t
czas
d
dystans
u
prędkość
b
eksponent (moc)
Wykresy ‘prędkość średnia – czas’ dla
rekordów świata. ab – bieganie, bc –
pływanie. Zaznaczono eksponenty
skalujące b i czasy krytyczne t.Z:
Sandra Savaglio, Vincenzo Carbone.
Scaling in athletic world records.
Nature 404, p. 244, 2000.
Organizacja jednostek
motorycznych
A. Najmniejsza jednostka motoryczna: każdy neuron unerwia pojedynczy mięsień. B. Duża jednostka
motoryczna ze współczynnikiem unerwienia 6. Wielkość jednostek motorycznych jest związana z precyzja z jaką
ma być sterowany dany mięsień. IR (innervation ratio 1 – 1000).
Rodzaje jednostek motorycznych
Wniosek: dany
motoneuron
unerwia włókna
mięśniowe tego
samego typu.
Rodzaje jednostek motorycznych
Rodzaje jednostek motorycznych w mięśniu łydki kota. Jednostki FF generują większe siły
niż jednostki FR. Jednostki S są wolnokurczliwe i generują małe siły. Siła skurczu wynika z
siły włókna mięśniowego danego rodzaju pomnożonej przez liczbę włókien aktywowanych
przez motoneuron.
Własności motoneuronów
Dwa motoneurony o różnych rozmiarach
otrzymują jednakowe pobudzające
wejście synaptyczne. Wpływ prądu
powoduje zmianę napięcia na błonie
proporcjonalną do oporu wejściowego
(V=IR). Małe komórki mają mniej
kanałów, a więc większy opór.
Największa zmiana napięcia powstaje w
komórkach najmniejszych. Dodatkowo,
komórki najmniejsze mają najmniejsza
prędkość przewodzenia, a komórki
największe, największą.
Reguła rozmiaru: małe motoneurony
unerwiają jednostki S, duże motoneurony
unerwiają jednostki FF i FR.
Rekrutacja jednostek ruchowych
Zależność pomiędzy regułą rozmiaru a zachowaniem ruchowym. A. Trzy rodzaje motoneuronów otrzymują dwa rodzaje
pobudzenia. Wejście A ma większą wydajność dla małych komórek (reguła rozmiaru), a wejście B ma dużą wydajność dla
największych komórek. B. Rekrutacja motoneuronów w wyniku zwiększania pobudzenia typu A leży u podstaw zmian
zachowania ruchowego od stania do galopu. Ekstremalna siła mięśnia np. podczas skoku jest rozwijana w wyniku pobudzenia
typu B największych motoneuronów.
Elektromiografia
A. Potencjał czynnościowy motoneuronu pobudza jednocześnie wiele włókien mięśniowych. B.
Elektroda igłowa umieszczona w pobliżu włókien. C. Potencjały czynnościowe pojedynczych włókien
(motor unit potentials) mierzone przez elektrodę igłową. D. Sumowanie pojedynczych potencjałów
czynnościowych włókien mięśniowych mierzone przez elektrodę.
Elektromiografia
W zadaniu motorycznym wymagającym wzrostu siły
następuje rekrutacje kolejnych jednostek motorycznych
oraz wzrost ich częstości odpalania. Częstość odpalania
zaczyna się w okolicy 8 Hz i wzrasta wraz ze wzrostem
siły. Zapis z mięśnia digitorum communis (prostownik
palców, miesien przedramienia) u człowieka.
Motoneurony pobudzone powyżej minimalnego pobudzenia generują salwy potencjałów
czynnościowych o częstościach 8 – 25 Hz, co powoduje powstawanie salw potencjałów
czynnościowych w mięśniach. Powstające prądy sumują się dając mierzalny sygnał poza
mięśniem.
Badanie EMG
W badaniach klinicznych uzywa się elektrod
igłowych EMG. Elektroda igłowa lub igła z
dwoma elektrodami wbijana jest w mięsień lub w
nerw ruchowy. Aktywność elektryczną obserwuje
się również podczas wbijania. Dostarcza to cennej
informacji o stanie mięśnia i unerwiającym go
nerwie. Następnie obserwuje się spontaniczną
aktywność mięśnia w spoczynku oraz aktywność
podczas wolnych ruchów. Elektroda jest
wysuwana parę mm i badanie się powtarza. Każdy
zapis oddaje tylko bardzo lokalne własności
mięśnia (aktywnosc pojednynczych włókien).
Elektrodę umieszcza się w różnych lokalizacjach.
W badaniach psychofizjologicznych stosuje się
powierzchniowe EMG, w ktorym elektrody
umieszcza się na powierzchni skóry. Ocenie
podlega ogólna aktywność mięśni położonych
powierzchownie lub grup mięśni (zginacze,
prostowniki, mięśnie oddechowe, mięśnie dna
miednicy). Badanie powierzchniowe wykonuje się
np. przy fizjoterapii i badaniu emg-biofeedback.
Elektromiogram
Typowy zapis powierzchniowego EMG. Dwa odprowadzenia monopolarne i
odprowadzenie bipolarne.
Zastosowania:
-diagnostyka problemów neurologicznych i nerwowo-mięśniowych
-fizjoterapia, biofeedback
-naukowe: badanie kontroli ruchu, mechaniki szkieletu, kroków, ruchu, postury,
man-machine interface, rozpoznawanie głosu na podstawie aktywności mięśni
mowy, robotyka.
Choroby jednostek motorycznych
Choroby jednostek motorycznych można podzielić na: zmiany w nerwach obwodowych
(neuropatie) i zmiany w mięśniach (miopatie).
A. Jednostka zdrowa. Wydajna
transmisja w złączu nerwowo –
mięśniowym zapewnia skurcz
mięśnia w odpowiedzi na
każdy potencjał czynnościowy.
B. Uszkodzony nerw. Liczba jednostek unerwianych
przez neuron A jest zmniejszona. Nieużywanie mięśni
prowadzi do ich zaniku (atrofia). Neuron B przejmuje
unerwianie niektórych jednostek. Aksony
uszkodzonych neuronów wykazują spontaniczną
aktywność (fibrylacje, góra). Potencjały
czynnościowe jednostek mają większą amplitudę
(środek). Znika wzorzec nakładania w warunkach
maksymalnego skurczu (dół).
C. Uszkodzony mięsień. Liczba włókien
w jednostce mięśniowej jest
zmniejszona. Potencjały czynnościowe
jednostek motorycznych występują w tej
samej ilości ale mają mniejszą amplitudę
i czas trwania.
Choroby jednostek motorycznych - neuropatie
Choroby jednostek motorycznych
Diagnostyka chorób jednostek motorycznych
Diagnostyka chorób jednostek motorycznych - test
uszkodzenie nerwu (fibrylacje * i fale ostre **)
neuromiotonia (nadaktywność motoneuronów)
stwardnienie zanikowe boczne ALS (choroba motoneuronów)
dystrofia miotaniczna (zanik mięśni)
Prędkość przewodzenia
Prędkość przewodzenia motoneuronów można badać poprzez rejestrację
potencjałów czynnościowych wzdłuż motoneuronu. Częstym powodem
spowolnienia prędkości przewodzenia jest demielinizacja włókien nerwowych.
Sterowanie maszynami
Wózek elektryczny sterowany sygnałami z mięśni
http://www.tinkertron.com/index.html
Ropoznawacz gestów
University of Washington, Microsoft, University of Toronto
Protezy bioniczne
Motoneurony z amputowanego
ramienia są przekierowane do
mięśni na powierzchni klatki
piersiowej. Chęć ruchu ręką
aktywuje mięśnie klatki
piersiowej, które kurcząc się
wysyłąją sygnały EMG do
motorów bionicznego ramienia.
http://mgitecetech.wordpress.com/2011/01/26/bionic-arm/