Zasady zachowania
• Pęd i moment pędu
• Praca, moc, energia
• Ruch pod działaniem sił
•
zachowawczych
Pęd i energia przy
prędkościach bliskich
prędkości światła
Pęd i moment pędu
dp/dt = F ⇒ p = const, gdy F = 0 (całka pędu)
Jest to zasada zachowania pędu
Moment pędu cząstki P
względem O
L = r × p = mr × v
L = mrv sinθ
Pęd i moment pędu
ix
iy
iz
L = Lx , Ly , Lz = r × p = x
px
y
py
z = yp z - zp y , zp x - xp z , xp y - yp x
pz
Szczególny przypadek:
ruch po okręgu
L
ω
r
v
L = mr × (vr + vθ) = mr × vθ
L = mr2ω = Iω
L = mr vθ = mr2(dθ/dt)
I = mr2 - moment bezwładności
Pęd i moment pędu
dL/dt = (dr/dt) × p + r × (dp/dt) = r × F = M
Moment siły F
względem punktu O
M = 0 ⇒ L = const
Zachowanie momentu pędu
1. F = 0 (cząstka swobodna)
L = mvr sin θ = mvb = const
2. Siła F równoległa do r, czyli F = f(r) ir
Przykłady: siła grawitacji
siła kulombowska
siła sprężysta
(siła centralna)
f(r) = – Gm1m2/r2
f(r) = Q1Q2/4πεor2
f(r) = – kr
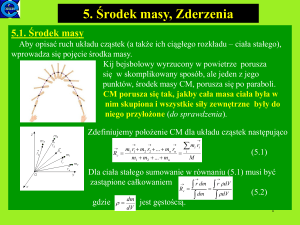
Ruch pod działaniem siły centralnej jest ruchem płaskim
Prędkość polowa
dS = (∆ OAB) = !r2dθ = !r × dr
dS/dt = !r2(dθ/dt) = L/2m = const
Prędkość polowa w ruchu pod
działaniem siły centralnej jest stała
II Prawo Keplera:
Keplera W jednakowych
odstępach czasu promień wodzący
planety zakreśla jednakowe pola
∆S1 = ∆S2 dla ∆t1= ∆t2
Praca, moc, energia
dr Ft
θ
F
r
O
Praca siły F przy przesunięciu dr
dW = F•dr = F cosθ ds = Ft ds
Siła normalna do przesunięcia
wykonuje pracę = 0
Przykłady: siła Lorentza, siła dośrodkowa
Praca na drodze między A i B
W = F1 •dr1 + F2 •dr2 +.....
B
W = ∫ F•dr
A
Ogólnie praca WAB zależy od drogi, po
której odbywa się przesunięcie między A i B
Siłę F oraz drogę l możemy
przedstawić w funkcji
parametru, np. długości łuku s
F = F (s), r = r (s)
Moc P = dW/dt = F(dr/dt) = F•v
Jednostka pracy: dżul (J) 1 J = 1 N • 1 m = 1 kg m2/s2
Jednostka mocy: wat (W) 1 W = 1 J/ 1 s = 1 kg m2/s3
Praca i energia kinetyczna
B
Fdr = Ftds = m(dv/dt)ds = m dv (ds/dt) = mv dv
B
B
A
A
A
W = ∫ Ftds = ∫ mvdv = 12mv 2B − 12 mv 2A = E k,B − E k,A = ∆E k
Niezależnie od postaci siły F i drogi praca siły jest równa zmianie energii
kinetycznej ciała w punktach końcowym B i początkowym A drogi
Przykład: ruch pod działaniem
stałej siły F = const
(np. ruch w polu grawitacyjnym
blisko powierzchni Ziemi)
B
B
A
A
W = ∫ Fdr = F ∫ dr = F(rB − rA )
Jest to szczególny przykład sił zachowawczych (konserwatywnych)
Siły zachowawcze i energia potencjalna
B
W = ∫ Fdr = E p,A − E p,B
A
B
A
Siły zachowawcze są takimi funkcjami
F(r) że pracę można wyrazić przez
różnicę wielkości Ep(r) na początku i na
końcu drogi
Jeżeli droga jest zamknięta, to praca jest równa zeru
!∫ Fdr = 0
Cyrkulacja (krążenie)
wektora F
B
B
A
A
∫ Fdr = E p,A − E p,B = −(E p,B − E p,A ) = − ∫ dE p
zatem Fdr = – dEp
Energia potencjalna
∂E p
∂E p
∂E p
Fx = −
;Fy = −
;Fz = −
∂x
∂y
∂z
∂E p
∂E p
∂E p
F = − ix
+ iy
+ iz
= − grad E p = −∇E p
∂y
∂z
∂x
∂
∂
∂
∇ = ix
+ iy
+ iz
operator różniczkowy „nabla”
∂x
∂y
∂z
θ i
s
n
powierzchnie ekwipotencjalne
gradient ma kierunek normalny do
powierzchni ekwipotencjalnej
centrum siły
∂E p
∂E p
grad E p = i n
;
= gradE p cos θ
∂n
∂s
(pochodna kierunkowa)
Zasada zachowania energii
B
W = ∫ Fdr = Ek,B -Ek,A = E p,A -E p,B
A
(Ek +Ep )B = (Ek +Ep )A = E = const
Przykład 1: siła sprężysta
Przykład 2:
energia
całkowita
∂E p
F = − kr = −
∂r
E p = ∫ krdr = 12 kr2 + C
k
kdr k
F= 2 ; E p = ∫ − 2 = +C
r
r
r
k = – GMm siła grawitacyjna
GMm
GMm
GMm
h
GMm GMm
Ep = −
1−
h
=−
≈−
=−
+
2
h
R+h
R
R
R
R
R(1+ R )
( )
const
mgh
Wykorzystanie zasady zachowania energii
do rozwiązywania zagadnień ruchu
Przykład: Ruch prostoliniowy pod działaniem zachowawczej siły F
Mamy Ep = Ep(x)
( ) + E (x) = constans
dx
1
E = 2m
dt
2
p
dx 2
E − E p (x ))
=
(
dt m
∫
x0
x
2
t
dx
2 (E − E (x ))
p
m
1
1
2
=
∫
dt = t
0
Jeżeli znamy Ep(x), to stąd znajdujemy związek między x i t
Przypadek F = constans; dEp = – Fdx
1
2m
∫
x
⇒
Ep = – Fx
dx
=t
E + Fx
0
2
2
E + Fx −
E = 2m t
F
F
( )
1 F 2
2E
x=
t +
t
2 m
m
a
v0
{E = mv2/2 + Fx; stąd E = mv02/2 jeśli x = 0 dla t = 0}
Ruch w polu zachowawczej siły centralnej
Zachowanie energii:
E = mv2/2 + Ep(r) = constans
Zachowanie momentu pędu: L = mrvθ = constans
( )
1
dr
E= m
2
dt
2
L2
+
+ E p (r)
2
2mr
„energia
odśrodkowa”
Ep,ef (r)
energia potencjalna
pola siły centralnej
efektywna energia potencjalna
Nazwa „energia odśrodkowa” pochodzi stąd, że „siła” związana z tą
energią ma zwrot od centrum siły
2
d L2
L2
d
θ
Fo = −
mr
=
=
2
3
dr 2mr mr
dt
Ruch w polu zachowawczej siły centralnej
Można rozwiązać osobno zagadnienie „części radialnej” ruchu
dr
=
dt
∫
r0
(
2
E − E p,ef (r )
m
)
r
dr
(
2
E − E p,ef (r )
m
Dwie możliwości:
)
To równanie określa granice
zmienności r podczas ruchu
=
∫
t
dt = t
⇒ r(t)
0
r ≥ rmin
ruch nieskończony
rmax≥ r ≥ rmin tor w obszarze ograniczonym
Ruch w polu zachowawczej siły centralnej
θ
„część kątowa” ruchu
ze związku L = mr2(dθ/dt)
θ − θ0 =
∫ ∫
dθ =
θ0
dr dr dt
=
=
dθ dt dθ
θ=
∫
(
t
L
dt
2
mr
0
2
mr2
E − E p,ef
m
L
L
mr2
(
2
E − E p,ef
m
)
dr + constans
)
Równanie toru we
współrzędnych
biegunowych
Ruch w polu zachowawczej siły centralnej
rmax
∆θ =
∫
rmin
dr
mr2
L
(
2
E − E p,ef
m
)
zmiana kąta biegunowego
przy przejściu od rmax do rmin
i z powrotem
Tor będzie krzywą zamkniętą,
jeżeli Δθ = 2π(m/n), gdzie
m, n są liczbami całkowitymi
rmax
rmin
Występuje to tylko dla dwóch pól
Ep(r) ∼ r–1
Ep(r) ∼ r2
Ruch w polu Ep(r) = – kr–1 (k > 0, siła przyciągająca)
Przykład: ruch planet,
komet itd.
Przy energii E1 ruch
nieskończony po
hiperboli, r > rA
Przy energii E2 ruch
skończony po elipsie
rmax= rC ≥ r ≥ rB= rmin
Przy energii E3 ruch
skończony po okręgu
r = r0 = rmax = rmin
Ruch w polu Ep(r) = – kr–1 (k > 0, siła przyciągająca)
θ − θ0 =
=−
∫
∫
(
L
mr2
2
E − E p,ef
m
dr=
)
()
() ()
1
r
2mE 2mk 1
1
+
−
L2
L2 r
r
d
L2
p=
mk
2
∫
=−
L
r2
dr =
2
k
L
2m E + −
2
r
2mr
1 1
d −
r p
∫
ε
1 1
−
2 −
p
r p
2
2
parametr orbity (krzywej stożkowej)
2
2EL
ε = 1+
mk 2
mimośród orbity
E < 0, ε < 1 elipsa
E = 0, ε = 1 parabola
E > 0, ε > 1 hiperbola
Ruch w polu Ep(r) = – kr–1 (k > 0, siła przyciągająca)
−
∫
dx
1 − x2
= arccos x
r=
p
1 + ε cos ( θ − θ0 )
równanie krzywej stożkowej
we współrzędnych biegunowych
ε = r/AB
2a = rmax + rmin =
= 2p/(1 – ε2) = k/2|E|
2b = 2p(1– ε2)–! = L(2m|E|)–!
W ruchu po elipsie odległość od
centrum siły zmienia się
od rmin (w pericentrum)
do rmax (w apocentrum).
Energia ruchu po elipsie zależy
wyłącznie od wielkiej półosi
elipsy, natomiast moment pędu od małej półosi
W szczególnym
przypadku
rmin = rmax = r
mamy ruch po okręgu
Innym szczególnym
przypadkiem elipsy
jest odcinek linii
prostej o długości 2a.
Wartość b = 0
odpowiada zerowemu
momentowi pędu
L=0
Dla szczególnego
przypadku E = 0 torem
ruchu ciała jest parabola.
Ruch jest nieskończony,
a ciało nie jest związane
przez centrum siły.
Dla E > 0 ruch jest
nieskończony; ciało
osiąga największe
zbliżenie do centrum
siły w punkcie rA = rmin
Jest to stan niezwiązany.
Przykład: orbity komet
nieperiodycznych
parabola E = 0
elipsa E < 0
hiperbola E > 0
okrąg E < 0
Orbity ciał o jednakowej masie m i jednakowej wartości
momentu pędu L, lecz o różnych wartościach energii E
względem centrum O siły przyciągającej
Ruch w polu Ep(r) = kr–1 (k > 0, siła odpychająca)
Przykład: rozpraszanie
cząstek alfa na jądrach
atomowych
model potencjału
odpychającego typu kr–1
(k > 0)
model potencjału
przyciągającego
typu – kr–1
(k > 0)
Przykład: ruch kulki w lejku o kącie rozwarcia α
Ep/V0 = – exp(–r/r0)
Ep/V0 =
Ep/V0 = – exp(–r/r0)2
Ep/V0 = – (r/r0)exp(–r/r0)
–1 dla r/r0 < 1
0 dla r/r0 > 1
różne typy
potencjałów
przayciągających
Potencjał Lennarda-Jonesa
oddziaływania między
cząsteczkami
(sił Van der Waalsa)
Energia i pęd w teorii relatywistycznej
dp d m 0 v
F=
=
dt dt 1 − v 2
c2
Związek między pędem i siłą
v
Ek =
∫
v
Fdr =
0
=
=
0
v
m0v2
2
v
1−
−
c2
m0c2
2
v
1−
∫
∫
0
d m0v
dr =
2
dt 1 − v
2
c
m 0 vdv
2
v
1−
c2
=
∫
0
m0v2
2
v
1−
− m 0 c 2 = (m − m 0 ) c 2
c2
v
m0v
vd
=
2
1−v 2
c
+ m0c
c2
2
2
v
1−
c
2
− m0c2 =
E = m0c2 - energia
spoczynkowa
E = mc2 - energia
całkowita
(
)
2
4
1
v
3
v
v
m = m0 1 −
= m0 1 +
+
+ .....
2
4
c2
2c
8c
4
1
3
v
1
E k = m 0 v 2 + m 0 2 + .... ≈ m 0 v 2 dla v << c
2
8
c
2
p2
3 p4
p2
Ek =
+
+ ..... ≈
3 2
2m 0 8 m 0 c
2m 0
1
γ =
2
1−β
2
2
− 12
⇒ γ 2 − β2 γ 2 = 1
m 20 c 4 γ 2 − m 20 c 4β2 γ 2 = m 20 c 4
E2 - p2c2 = m02c4
Transformacja energii i pędu
2
E
p2 − 2 = − m 20 c 2
c
niezmiennik
2
'2
E
E
p2x + p2y + p2z − 2 = p,2x, + p,2y, + p,2z, − 2
c
c
Podobieństwo do transformacji Lorentza współrzędnych i czasu
px→ x, py → y, pz → z, E/c → ct
p x, = γ ( p x − VE/c
,
p,y, = p y
p z, = p z
,
E' = γ (E − Vp x )
2
)
Do tych wzorów można dojść
na podstawie transformacji
prędkości
Ze wzorów
E2 – p2c2 = m02c4
m 20c 4
v = c 1− 2
E
oraz p = γm0v można otrzymać
2 4
m
c
0
1
log v = log c + 2 log 1 − 2
E
m 20 c 4 dE m 20 c 4 dE
dv
= 2
≅
2 4
v
E − m 0c E
E2 E
Dla bardzo dużych energii E >> m0c2, zatem można nadawać ciału
coraz większą energię nie zwiększając praktycznie jego prędkości.
dE
p2
dp
=
W podobny sposób można otrzymać
E
m20 c2 + p2 p
i dla ultrawysokich energii dE/E ≅ dp/p
Dla cząstek o m0 = 0 (fotony) E = pc = hν
czyli p = hν/c