5. Środek masy, Zderzenia
5.1. Środek masy
Aby opisać ruch układu cząstek (a także ich ciągłego rozkładu – ciała stałego),
wprowadza się pojęcie środka masy.
Kij bejsbolowy wyrzucony w powietrze porusza
się w skomplikowany sposób, ale jeden z jego
punktów, środek masy CM, porusza się po paraboli.
CM porusza się tak, jakby cała masa ciała była w
nim skupiona i wszystkie siły zewnętrzne były do
niego przyłożone (do sprawdzenia).
Zdefiniujemy położenie CM dla układu cząstek następująco
Rc
m1 r1 m2 r2 ... mn rn
m1 m2 ... mn
mi ri
(5.1)
i
M
Dla ciała stałego sumowanie w równaniu (5.1) musi być
zastąpione całkowaniem
r dm r dV
R
(5.2)
dm
dV
gdzie dm jest gęstością.
c
dV
1
Środek masy, c.d.
Dla ciała jednorodnego (ρ=const), położenie CM zależy tylko od kształtu ciała
Rc
r dV
dV
r dV
dV
(5.3)
Przykłady
1. Dwie cząstki o masach m1 i m2 w odległości wzajemnej d.
Położenie CM znajdujemy umieszczając obie cząstki na osi x .
Z równania (5.1) otrzymuje się
xC
m1 x1 m2 x 2 m1 x1 m2 ( x1 d )
m1 m2
m1 m2
Przyjmując x1=0 otrzymuje się
xC
m2 d
m1 m2
2. Środek masy trójkąta.
W tym przypadku zamiast stosowania równania (5.3), można
podzielić trójkąt na małe paski równolegle do każdego z boków.
Środek masy każdego paska leży w jego połowie. Dochodzimy ostatecznie do
2
wniosku, że przecięcie środkowych boków trójkąta wyznacza jego CM.
5.2. Ruch układu cząstek
Dla układu n cząstek można zapisać równanie (5.1) następująco
(5.4)
MRc m1 r1 m2 r2 ... mn rn
Różniczkując obie strony równania (5.4) po czasie otrzymuje się
M v C m1v 1 m 2 v 2 ... mn v n
(5.5)
Różniczkując ponownie po czasie równanie (5.5) mamy
M aC m1 a1 m2 a2 ... mn an
(5.6)
Równanie (5.6) może być zapisane następująco
M aC F1 F2 ... Fn
(5.6a)
W skład prawej strony równania (5.6a) wchodzą wszystkie siły, zarówno
wewnętrzne działające między cząstkami, jak i siły zewnętrzne. Z III zasady
dynamiki Newtona suma wszystkich sił wewnętrznych jest równa zero, gdyż
występują one parami, a zatem prawa strona równania (5.6a) jest wektorową sumą
sił zewnętrznych, siłą wypadkową. W tym przypadku otrzymuje się:
(5.7)
Fnet m aC
II zasada dynamiki zastosowana do układu mas
To potwierdza założenie poczynione na początku paragrafu.
3
5.3. Pęd układu cząstek
Równanie (5.5) można zapisać następująco
M v C p1 p2 ... pn
(5.8)
A zatem pęd wypadkowy układu cząstek (prawa strona powyższego równania)
jest równy iloczynowy masy całkowitej układu i prędkości środka masy
(5.9)
Mv P
C
Różniczkując równanie (5.9) względem czasu otrzymuje się
dv C dP
M
MaC
dt
dt
(5.10)
Z powyższej zależności, po uwzględnieniu równania (5.7) otrzymuje się
dP
Fnet
dt
Na
Pęd układu zmienia się na skutek działania sił zewnetrznych
(5.11)
(druga zasad Newtona dla układu cząstek).
podstawie (5.11) wnioskujemy, że jeżeli Fnet jest równe zero, zatem
P const
Dla izolowanego układu jego pęd nie zmienia się
(prawo zachowania pędu dla układu cząstek).
(5.12)
4
Pęd układu, przykład
Stojący na lodzie łyżwiarz A w pewnym momencie odpycha od siebie innego
łyżwiarza B, który zaczyna się poruszać z prędkością 3 m/s. Jaki jest kierunek
i wartość prędkości początkowej łyżwiarza A? Masy łyżwiarzy wynoszą
mA = 100 kg, mB = 60 kg.
Pęd układu w chwili początkowej wynosił zero i ponieważ zadziałały siły
wewnętrzne, więc się nie zmienił.
m A v A mBv B 0
Skierowując te wektory wzdłuż osi x można napisać
m Av A mBv B 0
lub
vA
mBv B
1,8 m / s
mA
Tzn. wektor v A ma przeciwny zwrot niż v B .
5
5.4. Zderzenia
Pęd ciała można zmienić w wyniku zderzenia z innym. Przykładem może być
uderzenie kija bejsbolowego w piłkę. Siły działające podczas zderzenia są duże
i działają krótko.
Na podstawie drugiej zasady dynamiki można zapisać
dp F ( t ) dt
(5.13)
Całkując równanie (5.13) w przedziale czasu Δt = tf – ti otrzymuje się zmianę pędu
tf
dp F ( t ) dt
tf
ti
ti
lub
tf
p F ( t ) dt
(5.14)
ti
Zmiana pędu ciała jest równa popędowi siły.
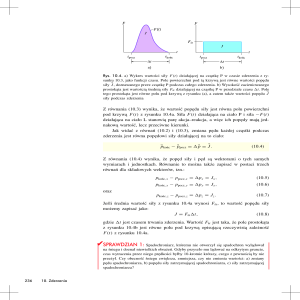
Na rys. po lewej pokazana jest zmiana w czasie siły z jaką
oddziałuje kij bejsbolowy na piłkę.
Pole powierzchni pod krzywą F(t) jest równe wartości
popędu doznawanego przez piłkę podczas zderzenia.
6
Zderzenia, cd.
W wielu przypadkach mamy do czynienia z układami izolowanymi, w których
ciała zderzają się wzajemnie. W takim przypadku pęd układu nie zmienia się
i niezależnie od rodzaju zderzenia suma pędów zderzających się ciał pozostaje
stała.
Gdy energia kinetyczna układu po zderzeniu nie zostaje zachowana to nazywamy
je niesprężystym. W przeciwnym przypadku zderzenie jest sprężyste.
Zderzenie całkowicie niesprężyste w jednym wymiarze
Zderzenie traktujemy jako całkowicie niesprężyste gdy dwa ciała po zderzeniu
nie rozdzielają się. W przypadku zderzenia w jednym wymiarze ruch ciał przed
i po zderzeniu odbywa się wzdłuż jednej linii prostej. Z prawa zachowania pędu
można napisać (ponieważ ruch jest jednowymiarowy nie musi się stosować zapisu
wektorowego):
m1v1 m2v 2 ( m1 m2 )u
(5.15)
7
Zderzenia, cd.
a zatem prędkość połączonych ciał po zderzeniu jest równa:
u
m1v1 m2v 2
m1 m2
(5.16)
Łatwo sprawdzić, że energia kinetyczna mas po zderzeniu jest mniejsza niż suma
ich energii kinetycznych przed zderzeniem.
Zderzenie sprężyste w jednym wymiarze
Korzystając z praw zachowania pędu i energii kinetycznej można zapisać
(5.17)
m1v1 m2v 2 m1u1 m2u2
m1v12 m2v 22 m1u12 m2u22
2
2
2
2
(5.18)
Rozwiązując układ równań (5.17) i (5.18) można wyznaczyć prędkości u1 i u2
po zderzeniu
u1
m1 m2
2m2
v1
v2
m1 m2
m1 m2
u2
2m2
m m2
v1 1
v2
m1 m2
m1 m2
Gdy cząstki mają te same masy, wymieniają
prędkości po zderzeniu
8
Zderzenia, cd.
Zadanie
Na rys. poniżej masa m2 znajduje się w spoczynku na gładkim stole i jest
przymocowana do ściany za pomocą sprężyny o stałej sprężystości k.
Masa m1 poruszająca się z prędkością v1 zderza się z masą m2 i obie masy
łączą się napinając sprężynę. Gdy masy te na moment się zatrzymują, to o ile
skróciła się wtedy sprężyna?
Z zasady zachowania pędu
otrzymuje się:
m1v1 ( m1 m2 )u0
u0
m1v1
m1 m2
u0 – prędkość w momencie rozpoczęcia sprężania
Energia kinetyczna układu mas zamienia
się w energię potencjalną sprężyny
m1 m2 u02
kx 2
2
2
m1 m2
x u0
k
m1v1
m1 m2 k
9
5a. Grawitacja
5a.1. Prawo powszechnego ciążenia
Dwie cząstki przyciągają się wzajemnie siłami grawitacji, z których każda jest
proporcjonalna do iloczynu ich mas. Prawo to sformułował Newton w postaci:
mm
F G 12 2
r
F12
m1
m1 i m2 – masy cząstek
r – odległość między cząstkami
G = 6.67 · 10-11 Nm2/kg2 - stała grawitacyjna
F21
^r
r
m2
F 12 F 21 r / r r
r wektor jednostkowy o wartości 1
Prawo grawitacji można zapisać w postaci wektorowej
F 21 G
m1 m 2
r
2
r
(5.19)
Chociaż prawo to stosuje się ściśle do punktowych cząstek, można je stosować
również do obiektów rzeczywistych z rozmiarami małymi w porównaniu do
odległości między nimi. Można je także stosować do mas o symetrii sferycznej.
10
5a.2. Przyciąganie grawitacyjne Ziemi
Ziemia przyciąga masę m położoną w odległości r od jej środka siłą
F G
m MZ
r2
(5.20)
m
r
Siła grawitacji F powoduje spadanie masy m
w kierunku środka Ziemi z przyspieszeniem
ag
M
F
MZ
G 2Z G
m
r
( RZ h ) 2
F
RZ
(5.21)
MZ
Przyspieszenie grawitacyjne zmienia się z wysokością h = r – RZ nad
powierzchnią Ziemi. Z równania (5.21) otrzymuje się :
h (km) ag (m/s2)
0
9.83
400
8.70
35700 0.225 (sat. telekom.)
Musimy jednak mieć na uwadze, że Ziemia nie jest kulista (bardziej podobna do
elipsoidy obrotowej spłaszczonej na biegunach), jej gęstość nie jest stała i obraca
się wokół osi. Zatem założenie, że w każdym miejscu na powierzchni Ziemi
g = 9.8 m/s2 jest uproszczeniem. W ogólności g jest mniejsze na równiku od 11ag
wg. wzoru (5.21) o 0.034m/s2 .
5a.3. Ruch planet i satelitów
Do analizy tego ruchu stosuje się zasady dynamiki Newtona i prawo powszechnej
grawitacji.
Na rys. obok dwa obiekty o porównywalnych masach obracają się wokół
wspólnego środka masy C. Mają te same prędkości kątowe ω.
Z trzeciej zasady dynamiki siły dośrodkowe działające na
każdą z mas są sobie równe i równe sile grawitacji
r
mv 12 Mv 22
albo m 2r M 2R
r
R
GMm
m r
( R r )2
2
gdzie
2
T
R
(5.22)
C
(5.23)
m
F
M
F
Dla układu gwiazda planeta masa gwiazdy jest znacznie większa niż planety
(M>>m), stąd R<<r. W tym przypadku z (5.23 ) otrzymuje się
GM r
2
3
albo GM
4 2
T
r3
(5.24)
W ogólności planety poruszają się po orbitach eliptycznych z gwiazdą, np. Słońce,
w jednym z ognisk (pierwsze prawo Keplera) i w tym wypadku w miejsce r w12
równaniu (5.24) podstawia się półoś dużą elipsy a.
2
Ruch planet i satelitów, cd.
Zalezność między T2 i r3 otrzymana z (5.24) jest również znana jako tzw. III prawo
Keplera. Z zależności tej można określić masę gwiazdy gdy znane są T oraz r dla
orbitującej planety.
Równ. (5.24) może być również użyte do analizy ruchu satelitów wokółziemskich
(w tym wypadku podstawiamy M = MZ).
Przykład
Stosując równ. (5.24) wyznaczyć promień orbity satelity geostacjonarnego, który
wydaje się nieruchomy dla obserwatora na powierzchni Ziemi.
Wnioskujemy, że w tym wypadku płaszczyzna orbity satelity musi leżeć w
płaszczyźnie równika.
(5.25)
4 2 3
GM Z
T2
r
gdzie T 24 godz
Z (5.25) wyznacza się r
r
3
GM ZT 2
4 2
(5.26)
Po podstawieniu wymaganych danych otrzymuje się dla r ok. 42 000 km.
13
5a.4. Grawitacyjna energia potencjalna
Siła grawitacji jest typową siłą zachowawczą. W rozdz. 4.4 wprowadzono wyrażenie
na energię potencjalną w punkcie B danym wektorem r w odniesieniu do energii
potencjalnej UA w punkcie A
m
dr
r
U r U A FC dr
A
r
F(r)
B
RZ
Zakładając, że UA= 0 dla r = ∞ otrzymuje się wyrażenie
na energię potencjalną cząstki w polu sił zachowawczych
MZ
r
U r FC dr
(5.27)
Jeżeli źródłem siły zachowawczej FC jest Ziemia otrzymuje się z (5.27)
r
r
GMm
GMm
GMm
U r ( 3 ) r dr 2 dr
r
r
r
r
GMm
r
(5.28)
Równ. (5.28) jest wyrażeniem na energię potencjalną masy m w polu grawitacyjnym
masy M (ściśle jest to energia potencjalna układu dwu mas).
14
Grawitacyjna energia potencjalna, cd.
Prędkość ucieczki
Z jaką prędkością początkową należy z powierzchni Ziemi wystrzelić pionowo
pocisk aby nie wrócił na Ziemię.
Z równ. (5.28) wynika, że w nieskończoności energia potencjalna pocisku jest równa
zero. W nieskończoności pocisk się zatrzymuje, zatem jego energia kinetyczna
również osiągnie wartość zerową. Całkowita energia mechaniczna w
nieskończoności jest więc równa zero. Z zasady zachowania energii mechanicznej
wynika, że suma energii kinetycznej i potencjalnej na powierzchni Ziemi jest równa
sumie tych energii w nieskończoności, czyli zero.
mv02 GM Z m
00
2
RZ
(5.29)
W wyniku otrzymuje się
v0
2GM Z
11.2 km / s
RZ
(5.30)
Z (5.30) można wyliczyć prędkość ucieczki z dowolnego obiektu astronomicznego.
Dla gwiazdy neutronowej otrzymuje się prędkość rzędu 105 km/s.
15
Energia w ruchu orbitalnym
Satelita o masie m porusza się po orbicie radialnej wokół
Ziemi o masie M . Ponieważ M >> m, możemy przypisać
energie kinetyczną i potencjalną tylko satelicie.
Energia potencjalna jest dana równ. (5.28):
U (r )
r
m
M
GMm
r
Energia kinetyczna może być znaleziona z warunku, że siłą
dośrodkową w ruchu satelity jest siła grawitacji
GMm mv 2
r2
r
mv 2 GMm
2
2r
(5.31)
Całkowita energia mechaniczna jest zatem równa
(5.32)
GMm GMm
GMm
E U E
0
k
r
2r
2r
Energia całkowita jest ujemna co oznacza, że orbita jest
zamknięta.
16
Energia w ruchu orbitalnym, cd.
W ruchu po orbicie eliptycznej, zamieniamy
promień okręgu r w równ. (5.32) na półoś dużą a
elipsy.
Podczas ruchu po orbicie eliptycznej energie
kinetyczna i potencjalna zmieniają się periodycznie
ale całkowita energia mechaniczna jest zawsz stała.
Elipsa z półosią dużą a
i mimośrodem e. Słońce o masie
M znajduje się w ognisku elipsy F.
Energia całkowita orbitującego obiektu zależy
tylko od wartości półosi dużej a orbity eliptycznej
a nie od wartości mimośrodu e.
Dwie orbity: kołowa i eliptyczna, gdzie
promień okręgu jest równy półosi dużej a.
17