Wykład 12 bioMECH (13.05.2008)
1. Działanie na wektorach.
Rozkład wektora na kierunki składowe – rzutowanie.
Rzutowanie wektora na prostą – rzut początku i końca wektora na prostą wzdłuż prostych
prostopadłych do tej prostej (tzw. rzut prostokątny), jedna składowa.
Rzutowanie na osie Ox, Oy siły mięśniowej (Fm).
Rzutowanie na równię pochyłą siły ciężkości (Q).
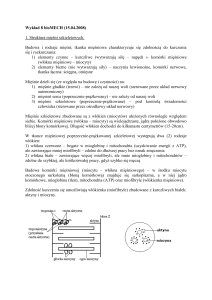
2. Działanie mięśnia na parę biokinematyczną.
a) wektor siły mięśniowej – Fm – zaczepiony jest w miejscu przyczepu mięśnia do kości,
a jego kierunek przebiega wzdłuż ścięgna (lub wzdłuż włókien).
b) kąt stawowy – kąt zawarty pomiędzy osiami długimi kości tworzących staw (wierzchołek
kąta w środku obrotu stawu).
c) kąt działania mięśnia, czyli ścięgnowo-kostny – kąt zawarty pomiędzy prostą przechodzącą
przez środek obrotu i punkt przyczepu mięśnia, a kierunkiem siły mięśnia, mierzony od strony
stawu (wierzchołek kąta w punkcie przyczepu mięśnia).
d) składowe siły mięśniowej:
- stawowa – siła leżąca na kierunku prostej poprowadzonej przez środek obrotu i punkt
przyczepu mięśnia o wartości i zwrocie wynikającym z rzutowania wektora, siły mięśniowej
(Fm) na ten kierunek (może ściskać staw lub go rozciągać – rozrywać)
- obrotowa, moment siły – siła leżąca na kierunku prostej prostopadłej do składowej
stawowej przechodzącej przez punkt przyczepu mięśnia o wartości i zwrocie wynikającym
z rzutowania wektora siły mięśniowej (Fm) na ten kierunek tworzy moment siły obracający
kości względem siebie)
Kąt działania mięśnia i jego zmienność, składowe siły mięśniowej w zależności od kąta
działania. Trzy przypadki ustawienia kąta działania mięśnia:
- kąt ostry,
- kąt prosty,
- kąt rozwarty
Najkorzystniejsze ustawienie dla wywołania ruchu obrotowego w stawie (największe wartości
składowej obrotowej) występuje przy kącie działania mięśni wynoszącym 90˚.
Cała siła mięśniowa (Fm) jest wtedy wykorzystana do obrotu, a składowa stawowa
ma wartość 0 (zero).
3. Akton mięśniowy, klasa aktonu.
Akton mięśniowy – jednostka funkcjonalna (czynnościowa) mięśnia.
Akton mięśniowy – mięsień lub część mięśnia o jednakowym albo bardzo zbliżonym
przebiegu włókien mięśniowych względem osi stawów, powodująca określony ruch pary
biokinematycznej (jednakowa funkcja względem osi stawu, nad którym przebiega
np. zginanie).
Akton mięśniowy:
- pojedynczy mięsień (cały), którego włókna działają identycznie (np. wrzecionowaty)
- część jednego mięśnia wykonująca określony ruch w stawie (np. jedna z głów mięśnia)
Jeśli kilka mięśni ma możliwość wykonywania określonego ruchu pary biokinematycznej
(np. zginanie) mówimy o zespole aktonów współpracujących ze sobą (synergistycznych).
Klasa aktonu (klasa mięśnia) – liczba określająca liczbę stawów, ponad którymi przebiega
dany akton (mięsień).
Akton pierwszej klasy – akton jednostanowy działający wokół osi obrotu 1 stawu
(np. ramienny i staw łokciowy » zginanie).
Akton trzeciej klasy – akton działający wokół osi obrotu 3 stawów (np. biceps gł. długa: staw
ramienny » zginanie, odwodzenie, probacja, staw łokciowy » zginanie, staw łokciowopromieniowy » pronacja)
Najwięcej klas mają aktony (mięśnie) wzdłuż kręgosłupa (działają wokół osi obrotu nawet
kilkudziesięciu stawów).
Jeden mięsień obsługuje średnio 3 stawy.
Jeden staw jest obsługiwany średnio przez 9 aktonów.
Jeden mięsień obsługuje średnio 3,8 stopnia swobody.
Jeden stopień swobody jest obsługiwany średnio przez 8,4 mięśnie.
4. Sterowanie ruchami.
- sterowanie nadążne – podążamy za impulsami (np. chód) – możliwe sterowanie
i korygowanie błędów (działanie w układzie zamkniętym – pętla ze sprzężeniem zwrotnym) –
małe prędkości ruchu
- sterowanie ante factum (przed faktem) – realizujemy ruch bez możliwości zmiany
(np. kopnięcie, uderzenie rakietą tenisową, cios bokserski, skok w dal) – czas obiegu
informacji (reakcji człowieka) jest zbyt długi, by korygować ruchy bardzo szybkie – ruchy nie
przewidują zmiany programu (działanie w układzie otwartym) – duże prędkości ruchu
(maksymalne prędkości). Zmiana programu jest możliwa dopiero przy powtórzeniu ruchu
(uczenie się).