Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Nr 63
Politechniki Wrocławskiej
Nr 63
Studia i Materiały
Nr 29
2009
silnik indukcyjny, monitorowanie,
zwarcia zwojowe, przesunięcie fazowe
Czesław T. KOWALSKI*, Robert WIERZBICKI*,
Marcin WOLKIEWICZ*
ANALIZA WPŁYWU USZKODZENIA UZWOJENIA STOJANA
SILNIKA INDUKCYJNEGO NA KĄT PRZESUNIĘCIA
FAZOWEGO POMIĘDZY PRĄDEM I NAPIĘCIEM
W artykule przeanalizowano wpływ zwarcia w uzwojeniu stojana silnika indukcyjnego na kąt
przesunięcia fazowego pomiędzy napięciem i prądem stojana. Przedstawiono model matematyczny
silnika indukcyjnego z uszkodzonym uzwojeniem stojana. Stopień uszkodzenia modelowany jest poprzez zmianę liczby zwojów w jednej fazie uzwojenia stojana. Analiza przesunięć fazowych została
wykorzystana do wyznaczenia wskaźnika progresji uszkodzenia uzwojenia stojana. Zaprezentowano
porównawcze wyniki badań symulacyjnych oraz eksperymentalnych silnika z uszkodzonym uzwojeniem stojana, zasilanego z przekształtnika częstotliwości, w przypadku różnej liczby zwartych zwojów i różnych momentów obciążenia silnika.
1. WSTĘP
Napędy z silnikami indukcyjnymi klatkowymi są najczęściej wykorzystywane
w zastosowaniach przemysłowych. Niski koszt ich produkcji oraz rozwój metod sterowania spowodował, że wyparły one silniki prądu stałego. Pełnią one często bardzo
ważną rolę w wielu procesach technologicznych i ich ewentualna awaria może spowodować duże straty finansowe lub nawet bardzo poważną awarię całego systemu
przemysłowego.
Najczęstszymi elektrycznymi przyczynami uszkodzeń silników indukcyjnych są
uszkodzenia uzwojeń stojana wynikające z degradacji izolacji międzyzwojowej, międzyfazowej lub głównej. Uszkodzenia izolacji pojawiają się nagle w postaci zwarć
w uzwojeniach i wymagają możliwie szybkiego odłączenia zasilania maszyny. Stoso__________
* Politechnika Wrocławska, Wydział Elektryczny, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, ul. Smoluchowskiego 19, 50-372 Wrocław, e-mail: [email protected];
[email protected]; [email protected]
253
wane obecnie układy zabezpieczeń nie reagują na zwarcia małej liczby zwojów
w uzwojeniu fazy, gdyż powodują one zbyt małe zmiany ilościowe w prądach fazowych. Natomiast prąd płynący w zwartym obwodzie, o wartości niekiedy kilkadziesiąt
razy większej od prądu znamionowego, powoduje szybki wzrost temperatury, zniszczenie izolacji i rozprzestrzenienie się efektów zwarcia na całe uzwojenie. Przyjmuje się,
że zwarcia zwojowe są pierwotną przyczyną występowania innych rodzajów zwarć
w uzwojeniach stojana. W większości przypadków ten typ uszkodzeń postępuje ze
zwoju do zwoju, fazy do fazy lub fazy do ziemi powodując w konsekwencji trwałe
uszkodzenia silnika. Diagnozowanie tego typu uszkodzeń ma sens tylko w początkowej
fazie powstawania uszkodzenia. Obecnie w praktyce przemysłowej najczęściej stosuje
się drogie metody diagnozowania oparte o badanie stanu izolacji uzwojeń stojana
(on-line i off-line). Jednocześnie trwają poszukiwania innych rozwiązań opartych
o pomiar i cyfrowe przetwarzanie sygnałów diagnostycznych [4], [6]. Zasilanie silników z przemienników częstotliwości wprowadziło dodatkowo szereg nowych trudności związanych z poszukiwaniem i ekstrakcją symptomów uszkodzeń.
2. MODEL MATEMATYCZNY SILNIKA INDUKCYJNEGO
Z USZKODZONYM UZWOJENIEM STOJANA
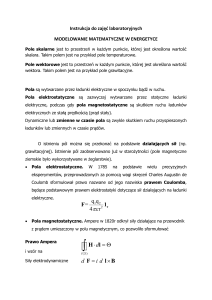
Najczęstszym uszkodzeniem uzwojenia stojana silnika indukcyjnego jest zwarcie
międzyzwojowe. Wystąpienie zwarcia międzyzwojowego powoduje powstanie dodatkowego obwodu zwarciowego w uszkodzonej fazie silnika (rys. 1) [1], [2].
izw
Rys. 1. Uzwojenia stojana silnika indukcyjnego – zwarcie w fazie A
Fig. 1. Stator winding of the induction motor in the case of shorted circuit in A phase
W przypadku silników indukcyjnych małej i średniej mocy spadki napięć na rezystancji i indukcyjności stojana są małe w porównaniu do napięcia zasilającego silnik. Po-
254
zwala to na wprowadzenie uproszczenia modelu matematycznego silnika indukcyjnego.
Powstająca w przypadku uszkodzenia uzwojenia stojana pętla zwarciowa Qzw może zostać umieszczona na wejściu schematu zastępczego proponowanego modelu (rys. 2).
isαβ i'sαβ rs
xs
xr
izw
usαβ
xm
Qzw
irαβ
rr
imαβ
Rys. 2. Schemat zastępczy silnika indukcyjnego w przypadku zwarcia w fazie uzwojenia stojana
Fig. 2. The induction motor equivalent circuit diagram in the case of shorted circuit in one phase
Po uwzględnieniu powszechnie stosowanych założeń upraszczających, model matematyczny maszyny indukcyjnej w jednostkach względnych, uwzględniający zwarcie
w fazie A stojana (rys. 1) można zapisać w postaci równań stanu, w układzie współrzędnych (α−β ). Ogólnie równania zmiennych stanu dla modelu silnika indukcyjnego
klatkowego mają poniższą postać [5]:
x& (t ) = A(ωm )x(t ) + Bu(t ) ,
(1)
y (t ) = Cx(t ) + Du(t ) ,
(2)
w których:
[
x(t ) = isα
isβ ψ rα ψ rβ
[
u(t ) = [u α
y (t ) = isα
s
B=
],
T
(3)
]
T
isβ ,
usβ
]
T
(4)
,
(5)
Ωb ⎡1 0 0 0⎤
,
σ ⋅ xs ⎢⎣0 1 0 0⎥⎦
k r rr
1−σ
⎡ 1
0
⎢− x σ rs − x σ rr
xr xsσ
r
⎢ s
−
σ
ω k
1
1
⎢
−
rs −
rr − m r
0
⎢
xsσ
xrσ
xsσ
A (ωm ) = Ωb ⎢
xM
r
rr
0
− r
⎢
xr
xr
⎢
xM
⎢
rr
0
ωm
⎢
xr
⎣
(6)
ωm k r ⎤
xsσ ⎥
⎥
k r rr ⎥
xr xsσ ⎥ ,
⎥
− ωm ⎥
⎥
rr ⎥
−
xr ⎥⎦
(7)
255
⎡1 0 0 0 ⎤
C=⎢
⎥,
⎣0 1 0 0 ⎦
gdzie:
usα , usβ
(8)
– napięcia stojana w osiach α−β,
isα , isβ
– prądy stojana w osiach α−β,
ψ rα ,ψ rβ
– strumienie skojarzone uzwojenia wirnika w osiach α−β,
rs , rr
xs , xr
– rezystancja uzwojenia stojana, wirnika,
– reaktancja uzwojenia stojana, wirnika,
xM
– reaktancja główna,
xs xr
– współczynnik całkowitego rozproszenia maszyny,
xm2
ωm
– prędkość kątowa mechaniczna wirnika,
Ωb = 2πf sN – pulsacja odniesienia (bazowa),
f sN
– częstotliwość znamionowa uzwojenia stojana,
Wprowadza się prąd płynący w obwodzie zwarciowym uzwojenia stojana:
σ =1−
izw = Du(t ) ,
(9)
przy czym:
⎡1 n
D(nzw ,θ zw ) = ⎢ zw
⎣ 3 rs
3
∑ P(−θ )Q(θ
k =1
(10)
(11)
⎡cos(θ ) − sin(θ )⎤
P(θ ) = ⎢
⎥,
⎣ sin(θ ) cos(θ ) ⎦
(12)
liczba zwartych zwojów
,
liczba zwojów w nieuszkodzonym uzwojeniu
θ zw – parametr określający lokalizację uszkodzenia:
θ zw = 0 – zwarcie w fazie A,
2π
θ zw =
– zwarcie w fazie B,
3
⎦
⎡ cos(θ zw ) 2
cos(θ zw ) sin(θ zw )⎤
Q(θ zw ) = ⎢
⎥,
sin(θ zw ) 2
⎣cos(θ zw ) sin(θ zw )
⎦
gdzie:
nzw =
⎤
θ )⎥ ,
zw ) P (
256
4π
– zwarcie w fazie C,
3
dθ
ωm =
.
dt
Równania (1)–(8) oraz (9)–(12) tworzą pełny model matematyczny silnika indukcyjnego z uwzględnieniem zwarcia w fazie uzwojenia stojana.
θ zw =
3. METODYKA BADAŃ
Badania symulacyjne i laboratoryjne przeprowadzono dla silnika indukcyjnego
małej mocy typu STg 80x-4c (1,1 kW, liczba zwojów w jednej fazie stojana NS = 312)
zasilanego z przekształtnika częstotliwości, pracującego w układzie otwartym. W badanym silniku istniała możliwość modelowania zwarć zwojowych stojana w jednej
fazie (do 10% całego uzwojenia).
Przeprowadzono badania dla silnika obciążonego różnymi wartościami momentu
obciążenia. Silnik zasilany był z przekształtnika napięciem o częstotliwości fs = 50 Hz.
Przebadano następujące przypadki uszkodzeń: 1 zwarty zwój, 2 zwarte zwoje, 5 oraz
10 zwartych zwojów.
Podczas zwarcia zwojowego w fazie silnika indukcyjnego wartości prądów fazowych ulegają nieznacznym zmianom, co wymusza poszukiwanie nowych metod
pozwalających na wykrycie uszkodzenia [3], [4], [6]. W przeprowadzonych badaniach zauważono, że oprócz zmian amplitudy prądów, zmianie ulegają również
wartości przesunięć fazowych pomiędzy prądem a napięciem w każdej z faz. Poniżej zaprezentowano wyniki zmian kątów przesunięć fazowych oraz zaproponowano nowy wskaźnik określający lokalizację oraz stopień uszkodzenia uzwojenia
stojan.
4. WYNIKI BADAŃ SYMULACYJNYCH
Model matematyczny silnika indukcyjnego z uszkodzonym uzwojeniem stojana
został opracowany w środowisku Matlab/Simulink. Zastosowany krok obliczeń numerycznych wynosił: dt =1e-6s.
Na rysunkach 3 i 4 przedstawiono symulacyjne przebiegi prądu stojana w fazie A
(rys. 3a, 4a), w fazie B (rys. 3b, 4b) oraz w fazie C (rys. 3c, 4c) dla silnika nieobciążonego mo = 0 i obciążonego momentem znamionowym mo = moN, odpowiednio.
W chwili t = 0.4 s zasymulowano zwarcie 10 zwojów w fazie A.
257
i sA [p.u.]
a)
1
0.5
0
-0.5
-1
0.3
i sB [p.u.]
b)
isC [p.u.]
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
0.42
0.44
0.46
0.48
0.5
0.42
0.44
0.46
0.48
0.5
Czas [s]
0.5
0
-0.5
-1
0.3
c)
0.32
1
0.32
0.34
0.36
0.38
0.4
Czas [s]
1
0.5
0
-0.5
-1
0.3
0.32
0.34
0.36
0.38
0.4
Czas [s]
Rys. 3. Przebiegi prądów fazowych stojana isA (a), isB (b), isC (c), dla m = 0 – symulacje
Fig. 3. Simulated transients of phase currents isA (a), isB (b), isC (c), for load torque mo = 0
W chwili wystąpienia zwarcia, w obu przypadkach zauważalny jest wyraźny wzrost
amplitudy prądu w fazie A oraz w fazie B, natomiast amplituda prądu w fazie C zmniejsza się nieznacznie w porównaniu do amplitudy prądu w nieuszkodzonym silniku.
i sA [p.u.]
a)
1
0.5
0
-0.5
-1
0.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
0.42
0.44
0.46
0.48
0.5
Czas [s]
isB [p.u.]
b)
1
0.5
0
-0.5
-1
0.3
0.32
0.34
0.36
0.38
0.4
Czas [s]
isC [p.u.]
c)
1
0.5
0
-0.5
-1
0.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
Czas [s]
Rys. 4. Przebiegi prądów fazowych stojana isA (a), isB (b), isC (c), dla mo = moN – symulacje
Fig. 4. Simulated transients of phase currents isA (a), isB (b), isC (c), for load torque mo = moN
258
Rys. 5. Zmiana kąta przesunięcia fazowego w fazach stojana silnika indukcyjnego w zależności
od stopnia uszkodzenia uzwojenia stojana, mo = 0 (a), mo = moN (b) – symulacje
Fig. 5. Change of the induction motor phase shift depending on the stator fault level
mo = 0 (a), mo = moN (b) – simulation
Rys. 6. Zmiana kąta przesunięcia fazowego w fazach stojana silnika indukcyjnego w zależności
od stopnia uszkodzenia uzwojenia stojana oraz zmian momentu obciążenia: faza A (a), faza B,
(b) faza C (c) – symulacje
Fig. 6. Change of the induction motor phase shift depending on the stator fault level and load torque:
phase A (a), phase B (b), phase C (c) – simulation
259
Na rysunku 5 przedstawiono zmiany kąta przesunięcia fazowego pomiędzy napięciem
a prądem w każdej fazie w zależności od stopnia uszkodzenia uzwojenia stojana silnika
dla maszyny nieobciążonej (rys. 5a) oraz obciążonej momentem znamionowym (rys. 5b).
W przypadku zwarcia międzyzwojowego w uzwojeniu fazy A stojana silnika indukcyjnego wartość kąta przesunięcia fazowego w fazie A znacznie maleje, zarówno przy obciążonym jak i nieobciążonym silniku. W fazie B wartość kąta przesunięcia fazowego praktycznie nie zmienia się w funkcji liczby zwartych zwojów zarówno dla silnika nieobciążonego
jak i obciążonego. Natomiast w fazie C zmiany kąta φC w funkcji liczby zwartych zwojów
są minimalne w przypadku silnika nieobciążonego, a dla silnika obciążonego – duże.
Na rysunku 6a przedstawiono zmiany kąta przesunięcia fazowego pomiędzy napięciem a prądem w fazie A, na rys. 6b w fazie B oraz na rys. 6c w fazie C w zależności
od stopnia uszkodzenia uzwojenia stojana silnika dla różnych obciążeń maszyny.
Rys. 7. Wskaźnik progresji stopnia uszkodzenia uzwojenia stojana: faza A (a), faza B, (b)
faza C (c) – symulacje
Fig. 7. The progression indicator of the stator fault level: phase A (a), phase B (b),
phase C (c) – simulation
Jak wynika z przeprowadzonej analizy, wartość kąta przesunięcia fazowego pomiędzy napięciem a prądem w fazie silnika silnie zależy od wartości obciążenia maszyny (rys. 6).
260
Dlatego, do celów diagnostyki zwarć zwojowych, zdefiniowano wielkość określającą stopień uszkodzenia uzwojenia stojana silnika indukcyjnego, oznaczoną w następujący sposób:
ξ k = φ0 − φk ,
(12)
gdzie:
ξ k – wskaźnik progresji stopnia uszkodzenia uzwojenia stojana w [°],
φk – kąt przesunięcia fazowego pomiędzy prądem a napięciem stojana w jednej
fazie silnika dla k = 0, 1, 2, 5, 10 zwartych zwojów.
Wartości wskaźnika progresji stopnia uszkodzenia uzwojenia stojana silnika indukcyjnego przedstawiono na rys. 7 dla trzech faz. Największy wzrost wartości zaproponowanego wskaźnika ξ widoczny jest w fazie, w której wystąpiło uszkodzenie
(rys. 7a), natomiast w pozostałych nieuszkodzonych fazach zakres zmian jest dużo
mniejszy (rys. 7b, c), co pozwala – oprócz badania stopnia uszkodzenia uzwojenia
stojana – dokładnie określić jego lokalizację.
5. WYNIKI BADAŃ EKSPERYMENTALNYCH
Do pomiarów i analizy sygnałów na stanowisku laboratoryjnym wykorzystano
komputer przemysłowy NI PXI 8186 z kartą pomiarową NI PXI – 4472. Dokładnej
oceny wartości przesunięć fazowych dokonano za pomocą przyrządu wirtualnego,
opracowanego w środowisku LabView.
0.6
a)
isA [p.u.]
0.4
0.2
0
-0.2
-0.4
2.8
2.85
2.9
2.95
3
3.05
3
3.05
3
3.05
Czas [s]
b)
0.6
isB [p.u.]
0.4
0.2
0
-0.2
-0.4
2.8
2.85
2.9
2.95
Czas [s]
c)
0.6
isC [p.u.]
0.4
0.2
0
-0.2
-0.4
2.8
2.85
2.9
2.95
Czas [s]
Rys. 8. Przebiegi prądów fazowych stojana isA (a), isB (b), isC (c), dla mo = 0 – eksperyment
Fig. 8. Experimental transients of phase currents isA (a), isB (b), isC (c), for load torque mo = 0
261
Na rysunkach 8 i 9 przedstawiono eksperymentalne przebiegi prądu stojana w fazie
A (rys. 8a, 9a), w fazie B (rys. 8b, 9b) oraz w fazie C (rys. 8c, 9c) dla silnika nieobciążonego mo = 0 i obciążonego momentem znamionowym mo = moN, odpowiednio. Na
rysunku 8 zwarcie 10 zwojów w fazie A nastąpiło w chwili t = 2,93 s, a na rysunku 9
w chwili t = 2,63 s.
a)
1
isA [p.u.]
0.5
0
-0.5
-1
2.5
2.55
2.6
2.65
2.7
2.75
2.8
2.7
2.75
2.8
2.7
2.75
2.8
Czas [s]
b)
1
i sB [p.u.]
0.5
0
-0.5
-1
2.5
2.55
2.6
2.65
Czas [s]
c)
1
isC [p.u.]
0.5
0
-0.5
-1
2.5
2.55
2.6
2.65
Czas [s]
Rys. 9. Przebiegi prądów fazowych stojana isA (a), isB (b), isC (c), dla mo = moN – eksperyment
Fig. 9. Experimental transients of phase currents isA (a), isB (b), isC (c), for load torque mo = moN
Rys. 10. Zmiana kąta przesunięcia fazowego w fazach stojana silnika indukcyjnego w zależności
od stopnia uszkodzenia uzwojenia stojana, mo =0 (a), mo = moN (b) – eksperyment
Fig. 10. Change of the induction motor phase shift depending on the stator fault level mo = 0 (a),
mo = moN (b) – experiment
262
Przebiegi czasowe prądów zachowują się podobnie jak w badaniach symulacyjnych. Prąd w fazie A zwiększa swoją amplitudę w przypadku wystąpienia uszkodzenia, podobnie jak w fazie B, natomiast prąd w fazie C nieznacznie się zmniejsza.
Podobnie jak w badaniach symulacyjnych, na kolejnym rysunku przedstawiono zmiany kąta przesunięcia fazowego pomiędzy napięciem a prądem w każdej fazie w zależności
od stopnia uszkodzenia uzwojenia stojana silnika dla maszyny nieobciążonej (rys. 10a)
oraz obciążonej momentem znamionowym (rys. 10b).
Zwarcie zwojowe w uzwojeniu fazy A stojana silnika indukcyjnego powoduje
zmniejszenie wartości kąta przesunięcia fazowego w fazie A zarówno dla silnika nieobciążonego, jak i silnika obciążonego. Natomiast w fazie B wartości kąta przesunięcia fazowego w funkcji liczby zwojów zwartych nie zmieniają się dla różnych obciążeń. Natomiast w fazie C kąt przesunięcia fazowego maleje wraz ze wzrostem liczby
zwartych zwojów dla poszczególnych wartości obciążeń silnika. Wyniki eksperymentalne są zbieżne z wynikami badań symulacyjnych.
Rys. 11. Zmiana kąta przesunięcia fazowego w fazach stojana silnika indukcyjnego
w zależności od stopnia uszkodzenia uzwojenia stojana oraz zmian momentu obciążenia:
faza A (a), faza B, (b) faza C (c) – eksperyment
Fig. 11. Change of the induction motor phase shift depending on the stator fault level and load torque:
phase A (a), phase B (b), phase C (c) – experiment
263
Na rysunku 11a przedstawiono zmiany kąta przesunięcia fazowego pomiędzy
napięciem a prądem w fazie A, na rys. 11b w fazie B oraz na rys. 11c w fazie C
w zależności od stopnia uszkodzenia uzwojenia stojana silnika dla różnych stopni
obciążeń maszyny. Podobnie jak w przypadku badań symulacyjnych, wartość kąta
przesunięcia fazowego pomiędzy napięciem, a prądem w fazie silnika silnie zależy
od wartości obciążenia maszyny.
Zdefiniowany w poprzednim punkcie wskaźnik progresji stopnia uszkodzenia
uzwojenia stojana silnika indukcyjnego przedstawiono na rys. 12. Analogicznie jak
w przypadku badań symulacyjnych, największy wzrost wartości wskaźnika progresji stopnia uszkodzenia uzwojenia stojana ξ został zaobserwowany w fazie, w której wystąpiło uszkodzenie (rys. 12a). Zmiany wartości wskaźnika ξ są dodatkowym
źródłem informacji niezbędnych do określenia stopnia i lokalizacji zaistniałego
zwarcia międzyzwojowego.
Rys. 12. Wskaźnik progresji stopnia uszkodzenia uzwojenia stojana: faza A (a), faza B, (b)
faza C (c) – eksperyment
Fig. 12. The progression indicator of the stator fault level: phase A (a), phase B (b),
phase C (c) – experiment
264
6. PODSUMOWANIE
Zwarcia zwojowe mogą być bardzo łatwo modelowane przy użyciu przedstawionego modelu silnika. Stopień uszkodzenia może być kontrolowany poprzez liczbę
zwartych zwojów w jednej fazie. Zjawiska fizyczne, w przypadku zwarcia kilku
zwojów uzwojenia stojana, powodujące zmiany prądów w uzwojeniu stojana są dobrze odzwierciedlone przez model. Przedstawiony model matematyczny silnika indukcyjnego z uszkodzonym uzwojeniem stojana wykazuje dużą zbieżność badań symulacyjnych z eksperymentalnymi.
Zaproponowany wskaźnik progresji ξ jest użytecznym wyznacznikiem stopnia
uszkodzenia uzwojenia stojana. Analiza wielkości zmian zaproponowanego wskaźnika pozwala również w jednoznaczny sposób określić lokalizację występującego
uszkodzenia. Nieskomplikowany i szybki proces obliczania kątów przesunięć fazowych jest alternatywą dla stosowanych obecnie metod diagnostycznych wykorzystujących analizę częstotliwościową sygnałów diagnostycznych. Autorzy w dalszych
pracach zamierzają zastosować neuronowy lub rozmyty detektor wykorzystujący zaproponowany wskaźnik progresji stopnia uszkodzenia uzwojenia stojana ξ, który pozwoli na zbudowanie systemu diagnostycznego do diagnostyki stanu uzwojenia stojana silnika indukcyjnego.
Praca naukowa finansowana ze środków na naukę w latach 2007–2010 jako projekt badawczy rozwojowy nr R0101403.
LITERATURA
[1] BACHIR S., TNANI S., TRIGEASSOU J., CHAMPENOIS G., Diagnosis by Parameter Estimation
of Stator and Rotor Faults Occurring in Induction Machines, IEEE Trans. on Industrial Electronics,
Vol. 53, No. 3, June 2006, pp. 963–973.
[2] BOUZID M. B.K., CHAMPENOIS G., BELLAAJ N.M., SIGNAC L., JELASSI K., An Effective
Neural Approach for the Automatic Location of Stator Interturn Faults in Induction Motor, IEEE
Trans. on Industrial Electronics, Vol. 55, No. 12, 2008, pp. 4277–4289.
[3] KOWALSKI C.T., Monitorowanie i diagnostyka uszkodzeń silników indukcyjnych z wykorzystaniem
sieci neuronowych, Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych PWr.
nr 57, Monografie nr 18, 2005.
[4] NANDI S., TOLIYAT A.T., LI X., Condition Monitoring and Fault Diagnosis of Electrical Motors –
A Review, IEEE Trans. on Energy Conversion, Vol. 20, No. 4, 2005, pp. 719–729.
[5] ORŁOWSKA-KOWALSKA T., Bezczujnikowe układy napędowe z silnikami indukcyjnymi, Oficyna
Wydawnicza Politechniki Wrocławskiej, Wrocław 2003.
[6] SIDDIQUE A., YADAVA G., SIGH B., A Review of Stator Fault Monitoring Techniques of Induction Motors, IEEE Trans. on Energy Conversion, Vol. 20, No. 1, 2005, pp. 106–114.
265
ANALYSIS OF THE STATOR FAULT INFLUENCE TO THE PHASE SHIFT
BETWEEN STATOR CURRENT AND VOLTAGE OF THE INDUCTION MOTOR
In this paper an influence of the stator winding short-circuit to the phase shift between the phase current and voltage of the induction motor is presented. The mathematical model of induction motor in the
case of stator fault is presented. The fault level is modeled by a change of the stator winding turns in one
of stator phases. The phase shift analysis is used for the calculation of a progression indicator of the stator
fault level. Comparison between simulation and experimental results of the converter-fed induction motor
for different number of shorted turns and different load torque values is shown.