2. Rozkład normalny Gaussa
Rozkład Gaussa to rozkład gęstości prawdopodobieństwa z 2 parametrami:
x Ex - wartość oczekiwana, średnia,
varx 2 x - wariancja.
Rozkład Gaussa (normalny) opisany jest funkcją gęstości prawdopodobieństwa:
f x
2
1 x
1
x
exp
.
2
2 x
2 x
Standardowy rozkład normalny, to taki, którego wartość średnia jest zerowa a wariancja
równa 1:
x E x 0
varx 2 x 1
Funkcja gęstości prawdopodobieństwa przyjmuje postać:
f x
x2
1
exp .
2
2
Centralne twierdzenie graniczne
Suma n niezależnych zmiennych losowych, takich że: o wartości średniej
x E x i
wariancji varx 2 x , jest także zmienna losową o wartości średniej n E x i wariancji
n 2 x .
3. Wielowymiarowy rozkład normalny. Elipsy kowariancji
x są wektorami o n
Dla ogólnego przypadku n-wymiarowych zmiennych losowych, x i
elementach każdy. Łączna gęstość prawdopodobieństwa wyrażona jest wzorem:
1
T
f x1 , x2 ,.., xn f x k exp x
x B x
x
2
1
det B 2
k
n
2
Okazuje się, można to udowodnić, że macierz B jest równa odwrotności macierzy kowariancji
C (zdefiniowanej w p. 1.4):
2017-07-23
12
definicja
B C1
adjC
,
det C
Przypomnijmy macierz C::
C cij E x
x x
x
T
x1
x1
E x2
x 2 x1
x1 , x2
x2
x
n x n
2
x1
x1
E x2
x 2 x1
x1
x
n x n x1 x1
xn
x n
x1
x1 x2
x 2 x1
x1 xn
x n
2
x2
x2
x2
x 2 xn
x n
2
xn
xn
x n x2
x2
xn
Rozważmy przypadek 2 zmiennych losowych:
x x1 , x2 , E x
x
x1 ,
x2 ,varx1 12 ,varx2 22
T
T
Zgodnie z powyższym, macierz kowariancji C ma postać:
12
covx1 , x2
C
, gdzie covx1 , x2 covx2 , x1
22
covx2 , x1
definicja
a poszukiwana macierz odwrotna B C1
adjC
, po odpowiednich przekształceniach,
det C
wynosi:
22
covx1 , x2
1
B 2 2
.
2
1 2 cov x1 , x2 covx1 , x21
12
Gdy zmienne losowe są niezależne, i covx1 , x2 covx2 , x1 0 , wtedy macierz B ma postać:
2
1
B 2 2 2
1 2 0
1
0 12
12 0
0
.
1
22
W przypadku 2 zmiennych losowych, rolę przedziału ufności przejmują elipsy
kowariancji. Gdy zmiennych jest więcej, mówimy o elipsoidach kowariancji w przestrzeni
wielowymiarowej. Pozostańmy przy elipsach kowariancji.
Aby wyznaczyć linie stałej gęstości prawdopodobieństwa, wykładnik exponenty
funkcji gęstości prawdopodobieństwa f x
2017-07-23
13
1
T
f x1 , x2 f x k exp x
x B x
x
2
1
det B 2
k
n
2
1 1
2 2
1 22
2
1
2
1
21 2
należy przyrównać do wartości stałej, np. do 1:
x x
T
B x
x 1
a1 , a2 i o
Obierzmy przykład 2 zmiennych x x1 , x2 o wartościach średnich E x a
T
T
wariancjach varx1 12 , varx2 22 , dla których macierz B wynosi:
1
2
B 1
0
0
1
22
x B x
x 1 :
Podstawmy powyższe wielkości do równania na elipsę kowariancji x
T
1
2
x1 a1 , x2 a2 1
0
0
x a
1 1 1
1 x2 a 2
22
Po wymnożeniu otrzymujemy równanie:
x1 a1 2 x2 a2 2
12
22
1
Jest to równanie elipsy na płaszczyźnie x1 , x2 , o osiach 21 ,22 i o środku w punkcie o
współrzędnych a1 ,a2 . Kąt nachylenia osi elipsy zależy od znaku i wartości współczynnika
korelacji
cov x1 , x2
(patrz Rys.3). Trzy przedstawione na Rys. 3 przypadki różnią się
1 2
wartością i znakiem współczynnika korelacji ρ 0.00, 0.30, 0.70, 0.99 .
=0, zmienne są niezależne, elipsa przechodzi w koło,
>0, kąt nachylenia osi elipsy 090o,
<0, kąt nachylenia osi elipsy 90180o.
2017-07-23
14
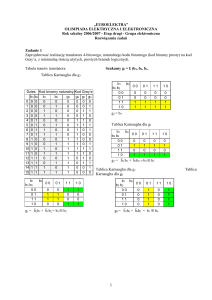
Rys.3. Elipsy kowariancji.
Rys. 4. Gęstość prawdopodobieństwa dla dwuwymiarowego rozkładu Gaussa i
odpowiadająca mu elipsa kowariancji. Przypadki różnią się tylko wartością współczynnika
korelacji -0.50, 0.00, 0.90 .
2017-07-23
15
Na Rys.4 przedstawione są gęstości prawdopodobieństwa
f x1 , x2 x1 , x2 dla
dwuwymiarowego rozkładu Gaussa i odpowiadające im elipsy kowariancji dla współczynnika
korelacji: =-0.5, =0.0, =+0.90.
Poziome przekroje tych funkcji są elipsami wzajemnie koncentrycznymi. Dla maksymalnej
wartości funkcji elipsa przechodzi w punkt o współrzędnych a1 ,a2 : rzut wierzchołka na
płaszczyznę x1 , x2 ma współrzędne a1 ,a2 .
Pionowe przekroje przechodzące przez wierzchołek to krzywe Gaussa, których szerokości
są wyznaczone przez punkty leżące na elipsie kowariancji i są różne dla różnych przekrojów.
Wszystkie inne linie stałego prawdopodobieństwa, gdy wykładnik jest przyrównany do innej
stałej c1, to także elipsy. Leżą one wewnątrz (gdy c>1) lub na zewnątrz (gdy c<1) elipsy
powstałej dla c=1.
Znaczenie elipsy kowariancji dodatkowo ilustruje Rys.5. Punkty leżące na elipsie są
jednakowo prawdopodobne co jest określone przez prawdopodobieństwo Pe . Każdy z
punktów leżących wewnątrz elipsy jest bardziej prawdopodobny od punktu leżącego na
elipsie, a każdy punkt na elipsie jest bardziej prawdopodobny od punktu leżącego na
zewnątrz elipsy. Jest tak niezależnie od tego jakie są geometryczne odległości tych punktów
od środka elipsy. Ilustruje to Rys.5.
Rys.5 Względne prawdopodobieństwo dla kilku punktów dla 2-wymiarowego
rozkładu normalnego. Punkty na elipsie: P1 P2 Pe , punkt wewnątrz elipsy: P3 Pe , punkt
na zewnątrz elipsy: P4 Pe .
Gdyby x miało nie 2 wymiary lecz n wymiarów, wówczas analogiczne rozumowanie
doprowadziłoby do równania:
2017-07-23
16
x1 a1 2 x2 a2 2 ... xn an 2
12
22
2n
1
Jest to równanie elipsoidy w przestrzeni n-wymiarowej, to tzw. hiperpowierzchnia.
Interpretacja i właściwości są takie same jak w przypadku 2-wymiarowym.
4. Pobieranie próby
Próbą nazywamy skończony zbiór doświadczeń dokonywanych w celu określenia rozkładu
badanej zmiennej. Częściej zmierzamy do wyznaczenia parametrów znanego rozkładu, np.
wartości średniej i wariancji dla rozkładu normalnego.
Zbiór wszystkich możliwych doświadczeń jest zazwyczaj nieskończony i nazywamy go
populacją generalną. Próba n-wymiarowa, to taka, która zawiera n elementów.
Na przykład: W wybranej szkole badamy wzrost uczniów z klas pierwszych. Mamy 6 klas po
30 uczniów. Zatem zbiór wszystkich możliwych przypadków, populacja generalna, to 180
uczniów. W każdej klasie badamy 10 uczniów. Oznacza to, że pobrano próbę 60wymiarową.
Załóżmy, że pobraliśmy p prób n-wymiarowych dla zmiennej x:
próba 1-sza
(ważymy uczniów z klasy nr 1)
.............
próba i-ta
(ważymy uczniów z klasy nr i)
.............
próba p-ta
(ważymy uczniów z klasy nr p=6)
x11 , x12 ,....., x1n
(n=10 wyników pomiaru)
.....................
x1i , x2i ,....., xni
(n=10 wyników pomiaru)
....................
x1p , x2p ,....., xnp
(n=10 wyników pomiaru)
Aby pobieranie próby było pobieraniem losowym, łączna gęstość prawdopodobieństwa
badanej zmiennej losowej g x g x1 , x2 ,.., xn musi spełniać następujące warunki formalne:
1. poszczególne xi muszą być niezależne, tzn. g x g1 x1 g 2 x2 ... g n xn ,
2. poszczególne rozkłady muszą być jednakowe i identyczne z rozkładem
f x dla
populacji generalnej, tzn. g1 x =...= g n x = f x
(w klasach są dzieci w równym wieku, żadna klasa nie skupia np. samych przerośniętych
repetentów).
Należy podkreślić, że w rzeczywistym pobieraniu próby często dosyć trudno jest zapewnić
pełną losowość procesu. O ile 1-szy warunek można zweryfikować porównując poszczególne
2017-07-23
17
rozkłady, o tyle warunek 2-gi, odnoszący się do populacji generalnej czasami jest niełatwy do
sprawdzenia.
Aby móc posłużyć się wynikami z próby do wyznaczenia parametrów rozkładu, po prostu
zakładamy, że próba została pobrana losowo. Nie mamy innej możliwości, należy jednak
wiedzieć co to założenie oznacza.
Funkcja zmiennej losowej x, będąca sama zmienną losową, to statystyka. Ważnym
przykładem takiej statystyki jest wartość średnia z próby: x
1
x1 x2 ... xn . Kolejna
n
n-wymiarowa próba tej zmiennej losowej dostarczy kolejną średnią. W tym sensie wartość
średnia z próby jest zmienną losową: x
1
x1 x2 ... xn E x
x
n
Rozważmy obecnie typowy problem, będący przedmiotem zainteresowania analizy danych:
załóżmy, że znamy analityczną postać funkcji, ale nie znamy jednego (lub więcej)
parametrów tej funkcji. Parametr ten (parametry) chcemy wyznaczyć na podstawie próby.
Mamy tu do czynienia z problemem estymacji parametrów. Estymowane parametry są
wyznaczane z próby, są to więc statystyki zwane estymatami, estymatorami (nowa próba, to
nowa wartość estymat). Oznaczmy jako S S x1 , x2 ,.., xn pewien estymator (np. estymator
parametru o prawdziwej wartości a wyznaczany jako średnia na podstawie n-wymiarowej
próby x
1
x1 x2 ... xn ).
n
Estymator S nazywamy nieobciążonym, jeśli ES x1 , x2 ,.., xn a dla każdego n.
0.
Estymator S nazywamy zgodnym, jeśli lim varS lim σ 2 S lim E S S
n
n
n
2
Estymator nieobciążony i zgodny to taki, którego średnia jest równa wartości rzeczywistej a
wariancja jest równa zero.
5. Wartość średnia z próby i wariancja z próby
Pamiętamy, że średnia arytmetyczna z próby ( x ) to nie jest to samo co wartość oczekiwana
(
x ):
x
1
x1 x2 ... xn E x
x , zachodzi natomiast Ex
x.
n
Oznacza to, że wartość oczekiwana zmiennej losowej (jaką jest średnia z próby) jest równa
wartości oczekiwanej tej zmiennej. Inaczej mówiąc: to średnia z wielu średnich staje się
bliska wartości oczekiwanej. Nie dotyczy to jednej, dowolnej z takich średnich x .
Uporządkujemy wyrażenia dotyczące średnich, wariancji i dokładności.
2017-07-23
18
Załóżmy, że zmienna losowa x jest mierzona n-krotnie. Czyli: pobieramy próbę o liczebności
n z populacji generalnej o gęstości prawdopodobieństwa f x odpowiadającej np. rozkładowi
normalnemu. Jest to najczęściej spotykana sytuacja pomiarowa.
Dla próby n-wymiarowej pobranej z populacji
generalnej
1 n
x xi
n i 1
Wartość średnia
Dla populacji generalnej
Wartość średnia
E x
x
xf x dx
σ 2 x E x
x
Wariancja z populacji
2
1 n
xi x 2
n 1 i 1
s 2 x
Wariancja z próby
x f x dx
x
2
-
Wariancja
wartości średniej
-
Błąd dowolnego
-
elementu próby
-
Błąd wartości
-
średniej
2017-07-23
1 2
s x
n
n
1
2
xi x
nn 1 i 1
s 2 x
19
x
1 n
xi x 2
n 1 i 1
x
n
1
xi x 2
nn 1 i1