Pomiary pośrednie parametrów elementów indukcyjnych
1. Pojęcia podstawowe
Element elektryczny – najprostsza część składowa układu elektrycznego; stanowi
samodzielną konstrukcyjną całość i wykazuje w istotny sposób jedną charakterystyczną
właściwość. Wśród wielu różnorodnych elementów wyróżnia się:
- elementy rezystancyjne, czyli przewodniki i rezystory - mające zdolność do przewodzenia
prądu
i
przemiany energii prądu elektrycznego na energię cieplną; zjawisko
bezpowrotnego rozpraszania energii elektrycznej nazywamy stratnością,
- elementy indukcyjne, czyli cewki, dławiki, transformatory - w wyniku przepływającego
prądu mają zdolność gromadzenia energii w postaci pola magnetycznego; nazywane są też
elementami zachowawczymi, gdyż energię pola magnetycznego można z powrotem
odzyskać,
- elementy pojemnościowe, czyli kondensatory – w wyniku występujących na okładkach
ładunków elektrycznych mają zdolność do gromadzenia energii w postaci pola
elektrycznego; są też elementami zachowawczymi.
Cewka indukcyjna – element elektryczny wykonany w postaci zwojnicy, której
podstawowym parametrem jest indukcyjność. Cewki dzielimy na bezrdzeniowe (powietrzne)
i z rdzeniem ferromagnetycznym. Właściwości cewek modeluje się najczęściej schematem
zastępczym w postaci dwójnika elektrycznego, składającego się z połączonych szeregowo
indukcyjności L i rezystancji R (rys. 1). Indukcyjność L reprezentuje pole magnetyczne
wytworzone przez uzwojenie cewki, zaś rezystancja R modeluje stratność cewki, wywołaną
rezystancją uzwojenia oraz stratami energii w rdzeniu (w przypadku cewek rdzeniowych).
I
L
R
UL
UR
LL
Rys. 1. Schemat zastępczy cewki indukcyjnej
Dławik – cewka z rdzeniem ferromagnetycznym i pojedynczym uzwojeniem,
charakteryzująca się dużą i stałą indukcyjnością, w funkcji częstotliwości. W obwodzie
elektrycznym stanowi duży opór dla prądu przemiennego, a mały dla prądu stałego. Dławiki
stosowane są w filtrach elektrycznych.
Metoda techniczna - zwana też metodą amperomierza, woltomierza i watomierza – może
być zrealizowana w dwóch układach pomiarowych, przedstawionych na rys. 2.
a)
b)
W
V
A
A
I
U
W
I
Z
V
U
Z
Rys. 2. Układy do pomiaru metodą techniczną parametrów cewek indukcyjnych i kondensatorów;
a) układ z poprawnie mierzonym prądem, b) układ z poprawnie mierzonym napięciem.
Stosując jeden z układów i mierząc natężenie prądu amperomierzem, napięcie
woltomierzem i moc czynną watomierzem, oraz wykorzystując prawa elektrotechniki dla
obwodów prądu sinusoidalnie zmiennego, oblicza się parametry badanego elementu:
1
- ze wskazań amperomierza i woltomierza wyznacza się impedancję elementu: Z
- ze wskazań amperomierza i watomierza – rezystancję elementu: R
UV
[] ,
IA
PW
[] ,
I 2A
- z wartości Z i R wynika reaktancja elementu: X L Z 2 R 2 [],
X
- z wartości XL – indukcyjność elementu: L L [H].
2 f
Na dokładność pomiarów układami z rys. 2. mogą wpływać błędy metody technicznej.
O wyborze do pomiarów jednego z nich decyduje mniejszy błąd metody. Jednak w praktyce
częściej wybiera się układ z poprawnie mierzonym napięciem, a to ze względu na łatwy
sposób obliczenia dla niego poprawek na wskazania amperomierza i woltomierza, i co za tym
idzie – na uzyskanie dokładniejszych wyników.
Jeżeli układ pomiarowy jest zasilany z sieci, w której częstotliwość napięcia wynosi
50Hz i ma dużą stałość, to nie jest wymagany pomiar częstotliwości. W innym przypadku
układ pomiarowy należy uzupełnić o miernik częstotliwości.
2. Program pomiarów, układ pomiarowy i tablica pomiarowa
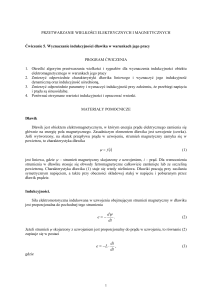
Metodą techniczną wykonać pomiary parametrów zastępczych dławika - jego
indukcyjności i rezystancji. W tym celu:
1. Zestawić układ pomiarowy w strukturze poprawnie mierzonego napięcia.
2. Wykonać pomiary dla 4...5 nastaw prądu przepływającego przez dławik.
A
230V
50Hz
W
V
f
Dławik
Rys. 3. Układ pomiarowy
Tab. 1. POMIARY PARAMETRÓW ZASTĘPCZYCH DŁAWIKA nr ........ (Idł.max = ...... A)
Pomiar I
ODCZYTY
Pomiar f
Pomiar U
Pomiar P
Lp.
Iz
IA
ur(I)
Uz
UV
ur(U)
f
ur(f)
Pz
cw
w
Pw ur(Pw)
A
A
%
V
V
%
Hz
%
W
W/dz
dz
W
1
2
3
4
5
2
%
pw
Pp
W
W
c.d. Tab. 1.
WYNIKI POMIARÓW
Z
R
R U(R), p=0,95
U r R
%
L
L U(L) , p=0,95
mH
U r L
%
W tablicy: Iz, Uz, Pz – zakresy pomiarowe przyrządów,
I
U
P
1
1
1
u r (I)
kl A z ; u r ( U)
kl V z ; u r (P)
kl w z
IA
UV
Pw
3
3
3
- niepewności standardowe przyrządów pomiarowych,
1
1
- poprawka na wskazania watomierza,
p w U 2V
R
R
V
W
Pp Pw p w - moc odbiornika (wartość poprawna),
Z = UV / IA - impedancja dławika.
3. Analiza metrologiczna pomiarów
Niepewność pomiarów rezystancji zastępczej R
P
, wynika zależność na wyznaczenie niepewności
I2
standardowej łącznej (względnej) pomiaru rezystancji:
Z równania pomiaru R
u r R u 2r P 4u 2r I [%].
W obliczeniach niepewności rozszerzonych na poziomie ufności p=0,95 należy
przyjąć współczynnik rozszerzenia k =2, i wtedy:
U r R k u r R 2 u r R [%],
i UR
U r R R
.
100%
Niepewność pomiarów indukcyjności zastępczej L
2
1
U
R 2 , wynika zależność na względną
I
2f
niepewność standardową łączną pomiaru indukcyjności:
Z równania pomiaru:
L
3
2
2
Z2 2
R2 2
2
2
u r R ,
u r L u f 2
u
U
u
I
r
r
2
2
Z
R
Z
R
gf
w zależności: u r f
.
3
2
r
Podobnie jw. przy p=0,95 - k=2, i wtedy:
U r L k u r L 2 u r L [%]
UL
U r L L
.
100%
Sprawozdanie powinno zawierać:
spis przyrządów w formie tabeli
dane obiektu pomiarowego
rysunek układu pomiarowego
tablicę pomiarową i przykładowe obliczenia wszystkich mierzonych wielkości
wykresy obrazujące zmienność parametrów dławika w funkcji prądu: L = f(I), R = f(I),
ocenę wykonanych pomiarów pod względem ich dokładności
ocenę właściwości dławika (na podstawie wykonanych wykresów).
4