II. OPIS PROCESU DYNAMICZNEGO, PODSTAWOWE TERMINY I POJĘCIA
18
________________________________________________________________________________________
II. OPIS PROCESU DYNAMICZNEGO, PODSTAWOWE TERMINY
I POJĘCIA
1. Kontinuum materialne
Jest to podstawowe pojęcie MOC.
Def.: Kontinuum materialne lub ośrodek ciągły jest rozmaitością różniczkowalną
K R 3 ,S ,
(2.1)
3
gdzie: R - kontinuum liczbowe trójwymiarowe,
S - struktura rozmaitości.
2. Rozmaitość różniczkowalna
Def.: Rozmaitość różniczkowalna jest to przestrzeń topologiczna Hausdorffa o następujących
cechach:
a) 2 różne punkty przestrzeni mają rozłączne otoczenia jak to pokazano na rys. 2.1.
Rys. 2.1. Dwa punkty przestrzeni z rozłącznymi otoczeniami
b) dla każdego otoczenia Vi można dobrać homeomorficzne odwzorowanie na przestrzeń Euklidesa (rys. 2.2)
i : Vi Di3 R 3 ,
(2.2)
Rys. 2.2. Odwzorowanie otoczenia Vi na E3
c) zbiór
(Vi , i ) , i = 1,2,... stanowi i-tą mapę; natomiast zbiór map {(Vi , i )} jest atlasem
przestrzeni,
d) jeżeli dwa punkty mają nierozłączne otoczenie (rys. 2.3)
B Vi Vk
Rys. 2.3. Nierozłączne otoczenie punktów
(2.3)
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
19
to B może być dwojako odwzorowane na przestrzeń R 3 , jak pokazano na rysunku 2.4,
oraz ik B ki B 0
Rys. 2.4. Odwzorowanie nierozłącznych otoczeń
e) odwzorowanie i ( ) powinno być ciągłe i różniczkowalne p-razy.
Def.: Rozmaitość różniczkowalna jest przestrzenią topologiczną jako rodzina podzbiorów Vi , na
której zadano atlas klasy C p ( p – rząd pochodnej).
3. Ciało materialne
Def.: Ciało materialne jest podzbiorem kontinuum materialnego B K i charakteryzuje się
następującą strukturą S :
a) Zbiór ciał materialnych jest ciałem materialnym
B B1 B2 ... Bn K
(2.4)
b) Każde ciało materialne może być odwzorowane na przestrzeń Euklidesa E 3
: B D E3
(
gdzie: - odwzorowanie homeomorficzne
zwane konfiguracją ciała B w E 3
Rys. 2.5. Odwzorowanie ciała B na E3
c) Najmniejszym elementem w ciele materialnym jest cząstka X, której obrazem jest punkt w
E3
X X oraz X
1
X
gdzie X B, X E 3 .
(2.6)
d) Dla każdej pary odwzorowań i istnieje odwzorowanie 1
Odwzorowanie
: E 3 E 3
(2.7)
3
przekształca przestrzeń Euklidesa E na siebie (patrz rys. 2.6).
II. OPIS PROCESU DYNAMICZNEGO, PODSTAWOWE TERMINY I POJĘCIA
20
________________________________________________________________________________________
Rys. 2.6. Sumowanie odwzorowań
e) W przestrzeni E 3 każdej konfiguracji odpowiada addetywna borelowska miara zbioru M
M:D R .
(2.8)
4. Miara borelowska
Przez miarę rozumiemy nieujemną liczbę rzeczywistą przyporządkowaną zbiorom w E3:
M D
gdzie D E 3
(2.9)
Własność addetywności miary:
jeżeli D1 D2 M D1 D2 M D1 M D2 .
(2.10)
5. Przykłady miar borelowskich
Masa ciała, gęstość jako miara borelowska
n
M B M Bi Mi
dla n
(2.11)
i 1
i
M Mi
i 1
dm .
(2.12)
D (B )
Objętość jako miara borelowska
V
dV .
(2.13)
D (B )
Gęstość masy
m
.
Vk 0 V
lim
Inne miary borelowskie: pola gęstości sił (zdefiniowane dalej)
(2.14)
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
21
6. Ruch ciała
Def.: Ruchem ciała nazywamy jednoparametrową rodzinę odwzorowań ciała B na przestrzeń
euklidesa E3
t : B T Dt
(2.15)
gdzie
Dt E 3 ,
t T czas należący do przedziału czasowego T.
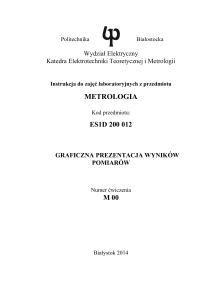
Aby pozostać w przestrzeni E 3 bez odwoływania się do punktów ciała B należy posługiwać
się złożeniem konfiguracji
0 t t 01 .
Stąd
x t 01 X, t 0 X, t X, t ,
i ostatecznie funkcję ruchu zapisujemy w postaci:
x X, t ,
(2.16)
(2.17)
(2.18)
3
gdzie: x E jest miejscem położenia cząstki w konfiguracji t ,
X E 3 jest „identyfikatorem” cząstki; oznacza miejsce cząstki X względem układu
współrzędnych materialnych.
Funkcja ruchu jest to odwzorowaniem homeomorficzne (jednoznacznym) co oznacza, że istnieje
funkcja odwrotna
X 1 x, t .
(2.19)
Rys. 2.7. Wybór konfiguracji odniesienia
7. Przestrzeń zdarzeń
Wszystkie zjawiska opisane w MOC dzieją się w czasoprzestrzeni Galileusza
E3 T ,
gdzie: E 3 przestrzeń Euklidesa,
(2.20)
II. OPIS PROCESU DYNAMICZNEGO, PODSTAWOWE TERMINY I POJĘCIA
22
________________________________________________________________________________________
T przedział czasu,
iloczyn kartezjański.
Punkty w identyfikowane są przez 4 liczby x1 , x 2 , x 3 , t .
Atrybuty przestrzeni E3:
– można zdefiniować ortokartezjański układ współrzędnych,
– dana jest metryka przestrzeni postaci (pomiar wzdłuż prostej)
2
x A , x B x1B x1A x B2 x A2 x B3 x 3A
o własnościach:
(a) x A , x B x B , x A ,
(b) x A , x B 0 x A x B ,
(c) x A , xC x A , xB xB , xC .
2
,
(2.21)
(2.22)
Atrybuty czasoprzestrzeni :
– przestrzeń E3 jest jednorodna – żaden punkt nie jest wyróżniony,
– przestrzeń E3 jest izotopowa – żaden kierunek nie jest wyróżniony,
– czas t T jest jednorodny,
– w przestrzeni E3 dla dwóch globalnych układów współrzędnych x i , xˆ i związanych zależnościami
xˆ t ct Qt x
(2.23)
,
tˆ t a
procesy dynamiczne Pt , f , p, , ... i Pˆ tˆ ˆ , fˆ , pˆ , ˆ , ... są równoważne, jeżeli ich
pola tensorowe transformują się następująco:
pole skalarne:
ˆ xˆ , tˆ x, t ,
(2.24)
(2.25)
fˆ xˆ , tˆ f x, t Q T t ,
pole wektorowe:
ˆ xˆ , tˆ Qt A x, t Q T t .
pole tensorowe walencji 2:
(2.26)
A
8. Opisy analityczne stosowane w MOC
1) Obserwator śledzi położenie cząstek (jest związany z tymi cząstkami), których współrzędne
są określone w konfiguracji wyróżnionej 0 . Wszystkie pola opisuje jako funkcje „identyfikatora” cząstki i czasu. „Identyfikatorem” jest położenie cząstki we współrzędnych materialnych.
Jest to opis materialny – opis Lagrange’a.
2) Obserwator śledzi co dzieje się w punktach geometrycznych przestrzeni. Wszystkie pola
opisuje jako funkcje punktów przestrzeni i czasu. W określonym momencie czasu wartość
funkcji odnosi się do tej cząstki materialnej, która aktualnie znajduje się w danym miejscu w
przestrzeni.
Jest to opis przestrzenny – opis Euler’a.
3) Obserwator śledzi położenie cząstek jak w opisie materialnym. Ponadto dynamicznie zmienia układ współrzędnych przestrzennych dopasowując go do deformacji ciała.
Jest to opis konwekcyjny.