64
5. Liniowe człony dynamiczne
5.1. Człony podstawowe (elementarne)
W złożonych układach automatyki zwykle można wyodrębnić szereg
najprostszych niepodzielnych już elementów funkcjonalnych. Pomimo różnorodnych
form ich fizycznej budowy i fizycznych postaci ich sygnałów, właściwości tych
najprostszych rzeczywistych elementów można przyporządkować z większym lub
mniejszym przybliżeniem zaledwie kilku różnym modelom matematycznym.
Abstrakcyjne urządzenia o właściwościach odpowiadających tym modelom nazywamy
podstawowymi (elementarnymi) liniowymi członami dynamicznymi. Równania ruchu
podstawowych liniowych członów dynamicznych (tabl. 5.1) są szczególnymi
postaciami równania różniczkowego (3.1).
Tabl. 5.1. Równania ruchu podstawowych liniowych członów dynamicznych
Nazwa członu
Równanie ruchu członu
Człon
y(t ) k u(t )
proporcjonalny
k nazywa się współczynnikiem wzmocnienia
(bezinercyjny)
(wzmocnieniem), jeżeli u i y są jednakowymi wielkościami
(5.1)
fizycznymi lub współczynnikiem proporcjonalności gdy u i y
są wielkościami różnymi.
Człon inercyjny
T
dy(t )
y (t ) k u (t )
dt
(5.2)
T - stała czasowa członu [s], k - wzmocnienie albo
współczynnik proporcjonalności
Człon całkujący
Jeżeli u i y są jednakowymi wielkościami fizycznymi
T
dy(t )
u (t )
dt
(5.3)
T - stała czasowa członu [s]
Jeżeli u i y są różnymi wielkościami fizycznymi
dy(t )
k u (t )
dt
k - współczynnik proporcjonalności
(5.4)
65
cd. tabl. 5.1
Człon różniczkujący Jeżeli u i y są jednakowymi wielkościami fizycznymi
idealny
y (t ) Td
du(t )
dt
(5.5)
Td - stała czasowa członu [s]
Jeżeli u i y są różnymi wielkościami fizycznymi
y (t ) k
du(t )
dt
(5.6)
k - współczynnik proporcjonalności
Człon różniczkujący Jeżeli u i y są jednakowymi wielkościami fizycznymi
rzeczywisty
T
dy(t )
du(t )
y (t ) Td
dt
dt
(5.7)
Td - stała czasowa różniczkowania [s],
T - stała czasowa inercji [s]
Jeżeli u i y są różnymi wielkościami fizycznymi
T
dy(t )
du(t )
y (t ) k
dt
dt
(5.8)
T - stała czasowa inercji [s],
k - współczynnik proporcjonalności
Człon oscylacyjny
1 d 2 y (t ) 2 dy(t )
y (t ) k u (t )
02 dt 2
0 dt
(5.9)
lub
d 2 y (t )
dy(t )
20
02 y (t ) k02 u (t )
2
dt
dt
(5.10)
0 - pulsacja drgań nie tłumionych,
- współczynnik tłumienia; 0 1 , k - wzmocnienie albo
współczynnik proporcjonalności
Człon opóźniający
y(t ) u (t T0 )
(5.11)
T0 - opóźnienie (czas opóźnienia) [s]
Uwaga! Równanie ruchu (5.9) gdy 1 nie reprezentuje członu oscylacyjnego.
Wprowadzając do równania (5.9) oznaczenie 0 1 / T , otrzymuje się
66
T2
d 2 y (t )
dy(t )
2T
y (t ) k u (t )
2
dt
dt
Transmitancja operatorowa członu wyznaczona na podstawie tego równania ma postać
G( s)
y(s)
k
2 2
u ( s) T s 2Ts 1
W przypadku gdy 1 , transmitancję tę można przedstawić jako
G( s)
y( s)
k
u ( s) (Ts 1) 2
Element o takiej transmitancji można traktować jako szeregowe połączenie dwóch
członów inercyjnych o jednakowych stałych czasowych. Element o takiej transmitancji
nazywany jest inercyjnym II-giego rzędu. Natomiast jeżeli 1 , trójmian mianownika
transmitancji ma dwa rzeczywiste miejsca zerowe, gdyż
(2T ) 2 4T 2 0
i można go wyrazić w postaci iloczynu dwóch dwumianów.
A więc, jeżeli 1 , transmitancję członu można przedstawić w postaci
G( s)
y( s)
k
u ( s) (T1s 1)(T2 s 1)
Jest to więc transmitancja szeregowego połączenia dwóch członów inercyjnych o
różnych stałych czasowych.
5.1.1. Człon proporcjonalny
Podstawowe charakterystyki członu proporcjonalnego zestawiono w tabl. 5.2.
Przykłady urządzeń, które w określonych warunkach i określonych zakresach zmian
sygnałów, przy odpowiednich założeniach upraszczających, mogą być traktowane jako
elementy o właściwościach członu proporcjonalnego (elementy proporcjonalne)
przedstawiono na rys. 5.1. Np., w przypadku dźwigni zakłada się, że są one elementami
nieodkształcalnymi, bez masy i bez tarcia w przegubie.
Należy zwrócić uwagę na fakt, że o postaci równania ruchu elementu decyduje nie tylko
jego budowa lecz także sposób jego wykorzystania do przetwarzania informacji.
Dlatego obok schematów ideowych poszczególnych elementów zostały określone
wielkości wejściowe i wyjściowe.
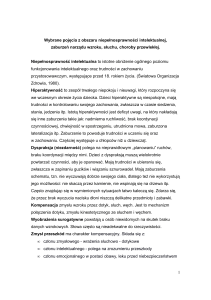
Na rys. 5.1 h), i) na schematach blokowych podane są transmitancje elementów;
wyznaczenie pozostałych pozostawia się czytelnikowi.
67
Tabl. 5.2. Charakterystyki członu proporcjonalnego
Równanie ruchu
y(t ) k u(t )
Charakterystyka statyczna
y k u
Transmitancja operatorowa
G( s )
y( s )
k
u( s )
Odpowiedź skokowa
1
y (t ) L1[ust k ] k u st
s
Transmitancja widmowa
G( j ) k
P( ) k
Q( ) 0
Logarytmiczna charakterystyka
amplitudowa
M ( ) k
L( ) 20 lg k [dB]
Logarytmiczna charakterystyka fazowa
( ) arctg
Q ( )
0
P ( )
68
Rys. 5.1. Przykłady elementów proporcjonalnych
Przykład 5.1
Wyznaczyć równanie ruchu elementu wg rys. 5.1a, którego wielkością wejściową jest
napięcie U1 , a wyjściową – napięcie U 2 .
69
Rozwiązanie
Równanie ruchu danego elementu można wyznaczyć na podstawie prawa Ohma.
Wartość prądu płynącego w danej chwili t przez rezystory R1 i R2 wyraża stosunek
napięcia do oporności
I
U1 U 2 U 2
,
R1
R2
skąd wynika zależność U 2
R2
U1 , obowiązująca w dowolnej chwili. Zatem,
R1 R2
równanie ruchu ma postać
U 2 (t )
R2
U1 (t )
R1 R2
Wzmocnienie elementu k
R2
ma wartość 1.
R1 R2
Przykład 5.2
Wyznaczyć równanie ruchu elementu wg rys. 5.1j zakładając, że wielkością wejściową
jest ciśnienie p wprowadzone do komory siłownika, a wyjściową – położenie y
tłoczyska siłownika ( C - sztywność sprężyny powrotnej).
Rozwiązanie
W tym przypadku zależność wielkości wyjściowej od wejściowej wynika z równania
równowagi sił działających na ruchome części siłownika. Siła
wynikająca
z
działania ciśnienia (nadciśnienia) p na powierzchnię A membrany, ściskając sprężynę
o sztywności C , powoduje wysuwanie tłoczyska o wartość y od stanu początkowego.
Załóżmy brak sił bezwładności (tj., że masa elementów ruchomych jest równa zero),
brak sił tarcia w układzie oraz pomijalnie małą objętość komory siłownika.
Równanie równowagi sił ma postać
p A C y,
skąd wynika zależność wielkości wyjściowej od wejściowej
y
C
p
A
i równanie ruchu
y (t )
C
p(t )
A
Stosunek C / A jest współczynnikiem proporcjonalności.
70
5.1.2. Człon inercyjny
Charakterystyki członu inercyjnego zestawiono w tabl. 5.3.
Tabl. 5.3. Charakterystyki członu inercyjnego
Równanie ruchu
T
dy(t )
y (t ) k u (t )
dt
Charakterystyka statyczna
y k u
Transmitancja operatorowa
G(s)
y(s)
k
u ( s) Ts 1
Odpowiedź skokowa
1 k
y( t ) L1 u st
s Ts 1
u st k ( 1 e
t
T )
Transmitancja widmowa
G ( j )
P( )
k
Tj 1
k
T 2 1
kT
Q( ) 2 2
T 1
2
P( ) j Q( )
71
cd.tabl. 5.3
Logarytmiczna charakterystyka
amplitudowa
M ( ) [ P( )]2 [Q( )]2
M ( )
k
T 2 2 1
L( ) (20 lg k 20 lg T 2 2 1) [dB]
M ( ) k dla
k
T
k
M ( )
2
M ( )
1
T
1
T
1
dla
T
dla
Logarytmiczna charakterystyka fazowa
( ) arctg
Q ( )
arctgT
P( )
( ) T
( )
( )
2
4
1
T
1
dla
T
1
dla
T
dla
1
T
W tablicy 5.3 oznaczono numerami: 1 i 2 – rzeczywistą i asymptotyczną logarytmiczną charakterystykę amplitudową, 3 - rzeczywistą logarytmiczną
charakterystykę fazową, 4 - asymptotyczną logarytmiczną charakterystykę fazową
wyznaczoną metodą siecznej, 5 - asymptotyczną logarytmiczną charakterystykę fazową
wyznaczoną metodą stycznej.
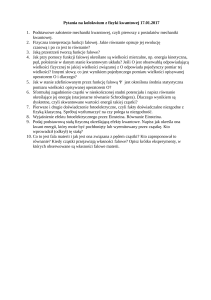
Odpowiedź skokowa członu inercyjnego (rys.5.2) może być wykorzystana do
wyznaczenia jego parametrów k i T . Wartość współczynnika k można wyznaczyć na
podstawie wartości ustalonej odpowiedzi. Stałą czasową można wyznaczyć kilkoma
sposobami.
Podstawiając do równania odpowiedzi skokowej czas t równy stałej czasowej
T ,otrzymuje się zależność
72
y (t ) t T 0,632 ku st ,
z której wynika, że po upływie czasu równego stałej czasowej od wprowadzenia
wymuszenia skokowego wartość odpowiedzi skokowej osiąga około 63,2% wartości
ustalonej.
Stałą czasową elementu inercyjnego można również wyznaczyć na podstawie
odpowiedzi skokowej jako czas, po którym styczna do odpowiedzi osiąga wartość
ustaloną tej odpowiedzi. Na przykład, równaniem stycznej z (t ) , wystawionej do
odpowiedzi przy t 0 , jest
t
z (t )
dy(t )
1
1
t [kust e T ]t 0 t [kust ] t
dt t 0
T
T
Dla t T styczna z (t ) osiąga wartość ku st , a więc ustaloną wartość odpowiedzi
skokowej. Podobnie można wyznaczyć stałą czasową, wystawiając styczną w
dowolnym punkcie odpowiedzi skokowej (tabl. 5.3).
Podobnie na podstawie równania odpowiedzi skokowej można obliczyć wartości
odpowiedzi po upływie wielokrotności stałej czasowej – rys. 5.2.
Rys. 5.2. Odpowiedź skokowa członu inercyjnego
Rys. 5.2 przedstawia także informację z jaką dokładnością wyznaczana jest
eksperymentalnie wartość ustalona odpowiedzi skokowej urządzenia o właściwościach
elementu inercyjnego w zależności od czasu trwania eksperymentu. Np., po upływie
czasu równego 4T błąd względny pomiaru wartości ustalonej jest mniejszy niż 2%.
Charakterystykę amplitudowo-fazową wyznacza się obliczając dla szeregu
wartości pulsacji wartości P( ) i Q( ) albo M ( ) i ( ) . Charakterystyka
amplitudowo-fazowa członu inercyjnego jest półokręgiem (tabl. 5.3). Współrzędne
charakterystycznych punktów tej charakterystyki podaje tabl. 5.4.
73
Tabl. 5.4.
0
s 1 / T
P( )
k
k /2
0
Q( )
0
k /2
0
M ( )
k
k/ 2
0
( )
0
/ 4
/ 2
Charakterystyczną wartością pulsacji jest tzw. pulsacja sprzęgająca s 1 / T . Wiedząc,
że przy tej pulsacji przesunięcie fazowe wynosi / 4 , na podstawie eksperymentalnie
wyznaczonej wartości pulsacji powodującej takie przesunięcie można wyznaczyć
wartość stałej czasowej elementu inercyjnego, a na podstawie wartości modułu M (s )
przy pulsacji sprzęgającej można wyznaczyć wartość współczynnika k - z zależności
k 2M (s ) .
Wyznaczanie
charakterystyk
logarytmicznych
na
podstawie
wzorów
definicyjnych
L( ) (20 lg k 20 lg T 2 2 1) [dB]
( ) arctgT
jest pracochłonne (w tabl. 5.3 charakterystyki te wykreślono liniami ciągłymi). Dlatego
w praktyce wykorzystuje się tzw. charakterystyki asymptotyczne, składające się z
odcinków linii prostych (w tabl. 5.3 wykreślono je liniami przerywanymi).
Asymptotyczna logarytmiczna charakterystyka amplitudowa składa się z dwóch
półprostych, określonych równaniami:
-
dla s
1
zakłada się, że T 2 2 1 1 , a więc
T
L( ) 20 lg k [dB]; jest to równanie linii prostej równoległej do osi odciętych,
-
dla s
1
zakłada się, że T 2 2 1 T 2 2 , a więc
T
L( ) (20 lg k 20 lg T ) [dB]; jest to równanie linii prostej o nachyleniu -20
dB na
dekadę (skrót: -20 dB/dek).
74
Tworzące charakterystykę asymptotyczną części tych linii stykają się przy s (stąd
nazwa s - pulsacja sprzęgająca), gdzie występuje największa różnica pomiędzy
charakterystyką rzeczywistą a asymptotyczną, wynosząca 3dB.
Dla
pulsacji
sprzęgającej
charakterystyka
asymptotyczna
przyjmuje
wartość
L(s ) 20 lg k [dB],
natomiast charakterystyka rzeczywista
L(s ) (20 lg k 20 lg 2 ) = (20 lg k 3) [dB].
Asymptotyczna logarytmiczna charakterystyka fazowa członu inercyjnego
składa się z dwóch półprostych i łączącego je odcinka linii prostej, pokrywającego się z
charakterystyką rzeczywistą w punkcie jej przegięcia o współrzędnych ( s , / 4 )
(tabl. 5.3). Stosowane są dwie metody wykreślanie środkowego odcinka charakterystyki
asymptotycznej - metoda siecznej albo metoda stycznej. Metoda siecznej polega na
przeprowadzeniu tego odcinka przez punkty o współrzędnych ( 0,1s , 0) i ( 10 s ,
/ 2 ), metoda stycznej – przez punkty (
1
s , 0) i ( 4,81s , / 2 ) (linia
4,81
przechodząca przez te punkty jest styczną do rzeczywistej logarytmicznej
charakterystyki fazowej w punkcie przegięcia). Ze względu na mniejsze (maksymalnie
+5073’ i -5073’) odchylenia od rzeczywistego przebiegu charakterystyki fazowej oraz
łatwość wykreślania, korzystniej jest stosować metodę siecznej.
75
Rys. 5.3. Przykłady elementów inercyjnych
Na rys. 5.3 przedstawiono przykłady urządzeń, które przy odpowiednich
założeniach upraszczających, mogą być traktowane jako elementy inercyjne.
Przykład 5.3
Wyznaczyć równanie ruchu elementu wg rys. 5.3a, którego wielkością wejściową jest
ciśnienie p1 przed zwężką, a wyjściową – ciśnienie p2 panujące wewnątrz zbiornika o
objętości V . Należy przyjąć, że:
- zmiany ciśnienia w zbiorniku są powolne i nie powodują zmian jego temperatury
(zmiany ciśnienia wg przemiany izotermicznej),
- w zwężce występuje przepływ laminarny.
Rozwiązanie
W przypadku przepływu laminarnego, strumień masy G powietrza przepływającego
przez zwężkę jest proporcjonalny do spadku ciśnienia na zwężce. W przypadku
dopływu do zbiornika
G ( p1 p2 ) ,
76
gdzie - współczynnik proporcjonalności.
Zależność masy m powietrza w zbiorniku o objętości
V dla określonej wartości
temperatury [K] i ciśnienia absolutnego p2 można wyznaczyć z równania stanu
gazu (prawo Clapeyrona)
m
p2V
,
R
gdzie: R 287 J/kgK – stała gazowa dla powietrza.
Zmiany masy powietrza w zbiorniku wskutek dopływu (lub wypływu) wywołują
zmiany ciśnienia, zgodnie z zależnością
dm(t )
V dp2 (t )
dt
R dt
Z prawa ciągłości (strumień masy powietrza płynącego przez zwężkę do zbiornika
zwiększa masę powietrza w zbiorniku) wynika, że
dm(t )
G , a więc
dt
V dp2 (t )
( p1 p2 ) ,
R dt
skąd wynika równanie ruchu
V dp2 (t )
p2 (t ) p1 (t )
R dt
Jest to więc element inercyjny o stałej czasowej T
V
i wzmocnieniu k 1 .
R
Przykład 5.4
Wyznaczyć równanie ruchu tłumika hydraulicznego wg rys. 5.3c, którego wielkością
wejściową jest
przesunięcie x końca sprężyny o sztywności C , a wyjściową –
przesunięcie y tłoka. Należy ponadto założyć brak ściśliwości oleju oraz, że
przepływy pomiędzy komorami tłumika mają charakter laminarny.
Rozwiązanie
Przesunięcie x końca sprężyny powoduje jej ugięcie i powstanie siły
wywołującej różnicę ciśnień p pomiędzy komorami tłumika, co z kolei powoduje
przepływ oleju przez dławik Z i w efekcie przemieszczanie tłoka. Z równania
równowagi sił działających na tłok
C[ x(t ) y(t )] A p ,
gdzie A - powierzchnia czynna tłoka, otrzymuje się
77
p
C
[ x(t ) y (t )]
A
W przypadku przepływu laminarnego, strumień objętości jest proporcjonalny do
wywołującej go różnicy ciśnień
Q(t ) p A
dy(t )
dt
Uwzględniając zależność określającą spadek ciśnienia p , otrzymuje się równanie
ruchu
A2 dy(t )
y (t ) x(t )
C dt
Jest to więc element inercyjny o stałej czasowej T
A2
i wzmocnieniu k 1 .
C
Przykład 5.5
Wyznaczyć równanie ruchu czwórnika RL wg rys. 5.3d, którego wielkością wejściową
jest napięcie U1 , a wyjściową – napięcie U 2 .
Rozwiązanie
Z równania określającego napięcie na zaciskach wejściowych
U1 (t ) L
dI (t )
U 2 (t )
dt
oraz prawa Ohma
I (t )
U 2 (t )
R
otrzymuje się równanie ruchu
L dU 2 (t )
U 2 (t ) U1 (t )
R dt
Jest to równanie elementu inercyjnego o stałej czasowej T
L
i wzmocnieniu k 1 .
R
Przykład 5.6
Wyznaczyć wartość napięcia wyjściowego U 2 czwórnika RC wg rys. 5.3e po
upływie 10 sek. od momentu skokowej zmiany napięcia wejściowego U1 o amplitudzie
2V. Wartości początkowe napięć U1 (0) U 2 (0) 0 V, oraz R 1 M , C 10 F.
Rozwiązanie
Prąd I płynący przez opór R i w obwodzie wyjściowym można wyrazić jako
78
U1 (t ) U 2 (t )
R
dU 2 (t )
I (t ) C
dt
I (t )
Z przyrównania tych zależności, po przekształceniu, otrzymuje się równanie ruchu
RC
dU 2 ( t )
U 2 ( t ) U1( t )
dt
Jest to równanie elementu inercyjnego o stałej czasowej T RC 10 sek. i o
wzmocnieniu k 1 .
Po upływie 10 sek. od chwili wprowadzenia na wejście sygnału skokowego, tj. po
upływie czasu równego stałej czasowej, napięcie wyjściowe U 2 osiągnie 63.2% stanu
ustalonego, a więc wartość 0,632 2 V = 1,264 V.
Przykład 5.7
Do pomiaru ciśnienia p gazu płynącego przez rurociąg zastosowano przetwornik
pomiarowy o transmitancji operatorowej
G( s)
I ( s)
k
p( s) Ts 1
gdzie: I – prądowy sygnał wyjściowy, p – ciśnienie wejściowe przetwornika .
Jaki będzie błąd pomiaru amplitudy zmian ciśnienia, zmieniającego się sinusoidalnie z
częstotliwością f 0,001 Hz, jeżeli stała czasowa przetwornika T 30 s.
Rozwiązanie
Przyrost wartości ciśnienia o p powinien spowodować, po ustaniu procesów
przejściowych, zmianę wartości sygnału wyjściowego przetwornika I k p .
W rozważanym przypadku, zmiany ciśnienia wejściowego o amplitudzie p
spowodują zmiany sygnału wyjściowego o amplitudzie
I ( ) p M ( ) p
k
T 2 1
2
,
gdzie 2f 0,00628 rad/s.
Po podstawieniu danych otrzymuje się
I ( ) p
k
30 0.00628 2 1
2
0,983 k p
Błąd względny pomiaru amplitudy zmian ciśnienia wynosi
79
I ( ) I
k p 0,983 k p
100 %
100 % 1,7%
I
k p
Ćwiczenie 5.1
Jaki jest sygnał wyjściowy elementu o transmitancji G ( s )
2
jeżeli na jego
0.1s 1
wejście podawany jest sygnał x(t ) 5 sin 10t ?
Odp.: y (t ) 5 2 sin(10t
4
).
Ćwiczenie 5.2
Rys. 5.4 przedstawia asymptotyczną logarytmiczną charakterystykę amplitudową
elementu inercyjnego. Jaka jest stała czasowa T i wzmocnienie k tego elementu?
Rys. 5.4. Rysunek do ćwiczenia 5.2
Odp.: T 0,4 sek., k 10 .
Ćwiczenie 5.3
Rys. 5.3b przedstawia koło zamachowe o momencie bezwładności J . Wyznaczyć
równanie ruchu urządzenia przyjmując, że wielkością wejściową jest moment
napędzający M , wyjściową – prędkość kątowa koła . Przyjąć założenie, że w
łożyskach występuje tylko tarcie lepkie proporcjonalne do prędkości kątowej
(moment tarcia M t R ;
R - współczynnik proporcjonalności).
Odp.:
J d (t )
1
(t ) M (t )
R dt
R
5.1.3. Człon całkujący
Charakterystyki członu całkującego zestawiono w tabl. 5.5.
80
Tabl. 5.5. Charakterystyki członu całkującego
Równanie ruchu T
dy(t )
u (t )
dt
Charakterystyka statyczna
u0
Transmitancja operatorowa
G(s)
y(s)
1
u (s) T s
Odpowiedź skokowa
1 1
t
y (t ) L1 ust
ust
s Ts
T
Transmitancja widmowa
G( j )
1
1
j
Tj
T
P ( ) 0,
Q( )
1
T
Logarytmiczna charakterystyka
amplitudowa
M ( ) [ P( )]2 [Q( )]2
L( ) 20 lg
1
T
1
20 lg T [dB]
T
Logarytmiczna charakterystyka fazowa
( ) arctg
Q( )
arctg
P( )
arctg
2
1
T
0
81
Na rys. 5.5 przedstawiono przykłady urządzeń, które przy odpowiednich
założeniach upraszczających, mogą być traktowane jako elementy całkujące.
Rys. 5.5. Przykłady elementów całkujących: a) – serwomotor hydrauliczny,
b) - przekładnia rolkowa
Przykład 5.8
Rys. 5.5a przedstawia schemat tzw. serwomotoru hydraulicznego, wykorzystywanego
w hydraulicznych układach automatyki. Składa się on z siłownika tłokowego o
powierzchni czynnej tłoka A i rozdzielacza. Sygnałem wejściowym serwomotoru jest
przemieszczenie x suwaka rozdzielacza względem pozycji, w której tłoczki suwaka
całkowicie zamykają otwory prowadzące do komór siłownika (jak na rysunku). W
takiej pozycji rozdzielacza tłok siłownika jest unieruchomiony (zakłada się, że
wypełniający komory siłownika olej jest nieściśliwy, oraz że nie ma przecieków wokół
tłoka). Odchylenie suwaka rozdzielacza od tej pozycji, powoduje jednoczesne
połączenie jednej komory siłownika z zasilaniem ( p z ), a drugiej - ze spływem ( ps ) i w
konsekwencji ruch tłoka siłownika. Wielkością wyjściową serwomotoru jest
przemieszczenie y tłoka względem pozycji początkowej.
Wyznaczmy równanie ruchu serwomotoru zakładając, że siły działające na tłok
(obciążenia zewnętrzne i opory ruchu) są pomijalnie małe, oraz że ciśnienia zasilania
p z i spływu ps są stałe. Przy takich założeniach strumień objętości Q1 oleju
wpływającego do jednej komory siłownika i taki sam strumień Q2 oleju wypływającego
z drugiej komory zależą tylko od wielkości powierzchni przepływowych w
rozdzielaczu, zależnych od położenia x suwaka.
Do obliczania strumienia objętości Q cieczy o gęstości przez zwężkę o powierzchni
przepływowej f , wykorzystuje się wzór
82
Q f
2
p
gdzie: - współczynnik przepływu, p - różnica ciśnień wywołująca przepływ.
W rozdzielaczu, szczeliny przepływowe na dopływie do siłownika i na wypływie
tworzą wykonane w korpusie rozdzielacza prostokątne okna o szerokości b ; przy x 0
są one całkowicie przysłonięte przez tłoczki rozdzielacza. Dla x 0
powierzchnie
przepływowe są równe f b x .
Wprowadzając oznaczenie
b
2
( p z ps ) B ,
na podstawie prawa ciągłości można napisać
Q1 Q2 B x(t ) A
dy(t )
,
dt
skąd otrzymuje się równanie ruchu
A dy(t )
x(t ) .
B dt
Jest to równanie elementu całkującego o stałej czasowej
T
A
B
A
b
2
.
( p z ps )
Przykład 5.9
Wyznaczyć równanie ruchu przekładni przedstawionej na rys. 5.5b. Obracająca się ze
stałą prędkością kątową tarcza, wprawia w ruch rolkę o promieniu r . Wielkością
wejściową elementu jest odległość x punktu styczności rolki z tarczą od środka tarczy,
wielkością wyjściową – położenie kątowe rolki.
Rozwiązanie
Przy założeniu, że toczenie odbywa się bez poślizgu, można przyjąć, że prędkości
liniowe tarczy i rolki w punkcie styczności są jednakowe
r
d ( t )
x
dt
skąd
83
d ( t )
x
dt
r
Jest to równanie elementu całkującego o współczynniku proporcjonalności k
r
.
Ćwiczenie 5.4
Wyznaczyć stałą czasową T serwomotoru hydraulicznego przedstawionego na rys.
5.5a. Dane: powierzchnia czynna tłoka A 100 cm2, szerokość szczeliny wlotowej
b 1 cm, współczynnik przepływu 0,6, gęstość oleju 880 kg/m3, ciśnienie
zasilania p z 10 MPa, ciśnienie spływu ps 0 MPa.
Odp.: T 0,1 sek.
Ćwiczenie 5.6
Określić wartość stałej czasowej T elementu o transmitancji G ( s )
1
, jeżeli jego
Ts
sygnał wyjściowy osiągnął wartość 10 po upływie 30 sek. od momentu skokowej
zmiany sygnału wejściowego u (t ) 2 1(t ). Założyć zerowe warunki początkowe.
Naszkicować przebieg zmian u(t ) i y (t ) .
Odp.: T = 6 sek.
Ćwiczenie 5.7
Rys. 5.6 przedstawia charakterystykę amplitudowo – fazową elementu całkującego.
Określić wartość stałej czasowej tego elementu.
Rys. 5.6. Rysunek do ćwiczenia 5.7
Odp.: T = 0,1 sek.
84
5.1.4. Człon różniczkujący idealny
Charakterystyki idealnego członu różniczkującego idealnego zestawiono w tabl. 5.6.
Tabl. 5.6. Charakterystyki członu różniczkującego idealnego
Równanie ruchu
y (t ) Td
du(t )
dt
Charakterystyka statyczna
y0
Transmitancja operatorowa
G (s)
y ( s)
Td s
u (s)
Odpowiedź skokowa
1
y (t ) L1 ust Td s ust Td (t )
s
Transmitancja widmowa
G( j ) jTd
P( ) 0,
Q( ) Td
Logarytmiczna charakterystyka
amplitudowa
M ( ) [ P( )]2 [Q( )]2 Td
L( ) 20 lg Td [dB]
Logarytmiczna charakterystyka fazowa
( ) arctg
arctg
2
Q( )
T
arctg d
P( )
0
85
Przykładem idealnego elementu różniczkującego jest prądnica tachometryczna.
Napięcie wyjściowe U y prądnicy jest proporcjonalne do prędkości obrotowej jej
wirnika, a więc do pochodnej kątowego położenia wirnika. Traktując położenie
kątowe wirnika jako wielkość wejściową, a napięcie U y jako wielkość wyjściową,
równanie ruchu prądnicy można sformułować w postaci
U y (t ) k
d (t )
dt
5.1.5. Człon różniczkujący rzeczywisty
Charakterystyki członu różniczkującego rzeczywistego zestawiono w tabl. 5.7.
Tabl. 5.7. Charakterystyki członu różniczkującego rzeczywistego
Równanie ruchu
T
dy(t )
du(t )
y (t ) Td
dt
dt
Charakterystyka statyczna
y0
Transmitancja operatorowa
G( s)
y( s)
Ts
d
u ( s) Ts 1
Odpowiedź skokowa
t
T s
Td T
y (t ) L1 ust d
u
e
st
s(Ts 1)
T
ust kd e
kd
t
T
Td
- wzmocnienie dynamiczne
T
Transmitancja widmowa
G( j )
P( )
Td j
P( ) jQ( )
Tj 1
Td T 2
T 2 2 1
Q( )
Td
T 2 1
2
86
cd. tabl.5.7
Logarytmiczna charakterystyka
amplitudowa
Td
M ( )
T 2 2 1
L( ) [20 lg Td 20 lg T 2 2 1] [dB]
1
T
Td
1
M ( )
dla
T
T
Td
1
M ( )
dla
T
T 2
M ( ) Td dla
Logarytmiczna charakterystyka fazowa
( ) arctg
2
Q( )
1
arctg
P( )
T
arctgT
( )
T
2
1
( )
T
( )
4
1
T
1
dla
T
1
dla
T
dla
W tablicy 5.7 oznaczono numerami: 1 i 2 – rzeczywistą i asymptotyczną logarytmiczną
charakterystykę amplitudową, 3 - rzeczywistą logarytmiczną charakterystykę fazową,
4 - asymptotyczną logarytmiczną charakterystykę fazową wyznaczoną metodą siecznej.
Znajomość cech odpowiedzi skokowej i charakterystyki amplitudowo-fazowej
umożliwia wyznaczanie parametrów członu na podstawie charakterystyk wyznaczonych
eksperymentalnie. W przypadku charakterystyki amplitudowo-fazowej, do wyznaczenia
tych parametrów wystarczy fragment w zakresie pulsacji od 0 do pulsacji, przy której
przesunięcie fazowe osiągnie wartość 450.
Charakterystyki logarytmiczne rzeczywistego członu różniczkującego są funkcjami
nieliniowymi. Podobnie jak w przypadku członu inercyjnego, zastępuje się je
87
charakterystykami asymptotycznymi. W tabl. 5.6 asymptotyczną charakterystykę
fazową wyznaczono metodą siecznej.
Asymptotyczne charakterystyki logarytmiczne amplitudową i fazową można także
wykreślić traktując rzeczywisty człon różniczkujący jako układ będący szeregowym
połączeniem idealnego członu różniczkującego i członu inercyjnego - rys. 5.7.
Rys. 5.7. Rzeczywisty człon różniczkujący jako szeregowe połączenie idealnego członu
różniczkującego i członu inercyjnego
Przykłady urządzeń, które mogą być traktowane jako elementy różniczkujące
rzeczywiste, przedstawia rys. 5.8.
Rys. 5.8. Przykłady elementów różniczkujących rzeczywistych: a) amortyzator
hydrauliczny, b) czwórnika RC
Przykład 5.10
Sformułować równanie ruchu i wyznaczyć odpowiedź skokową hydraulicznego
amortyzatora wg rys. 5.8a, jeżeli jego wielkością wejściową jest przemieszczenie u
cylindra,
wielkością
wyjściową
–
przemieszczenie
y
tłoczyska,
zakładając
nieściśliwość oleju. Komory cylindra połączone są ze sobą przewodem ze zwężką,
przez którą może przepływać olej (w innych rozwiązaniach zwężkę tę stanowi szczelina
pomiędzy tłokiem i cylindrem lub otwór w tłoku).
Tłoczysko z tłokiem osiąga położenie spoczynkowe ( y 0 ) tylko wtedy, kiedy
sprężyna o sztywności C nie jest napięta. Ze względu na nieściśliwość oleju, skokowa
zmiana wielkości wejściowej powoduje, z chwilą jej wprowadzenia, powstanie takiej
88
samej zmiany wielkości wyjściowej, z czym związane jest ugięcie sprężyny. Siła
ściśniętej (lub rozciągniętej) sprężyny, działając na tłok, wywołuje powstanie różnicy
ciśnień w komorach cylindra i przetłaczanie oleju przez zwężkę z komory o ciśnieniu
wyższym do drugiej komory, dzięki czemu następuje stopniowe rozprężanie sprężyny i
powrót tłoka do położenia początkowego. Należy założyć, że w zwężce kształtuje się
przepływ laminarny, tzn., że strumień objętości Q jest proporcjonalny do wywołującej
go różnicy ciśnień p , a więc Q k p ( k - współczynnik proporcjonalności, stała
zwężki).
Rozwiązanie
W tym przypadku podstawą wyznaczenia równania ruchu jest zasada ciągłości.
Przepływ przez zwężkę umożliwia względny ruch tłoka względem cylindra, a więc:
du(t ) dy(t )
A
Q k p
dt
dt
Uwzględniając, że
p
C
y (t ) , gdzie A - powierzchnia czynna tłoka,
A
otrzymuje się równanie ruchu
A2 dy(t )
A2 du(t )
y (t )
k C dt
k C dt
Jest to więc równanie ruchu elementu różniczkującego rzeczywistego o stałych
A2
czasowych T Td
(wzmocnienie dynamiczne kd 1 ).
kC
Transmitancja operatorowa elementu ma postać
G( s)
y( s)
Ts
u ( s) Ts 1
Odpowiedź skokową
t
T s
T
y(t ) L1 ust
u
e
st
s(Ts 1)
przedstawia rys. 5.9.
89
Rys. 5.9. Odpowiedź skokowa amortyzatora hydraulicznego
Przykład 5.11
Obliczyć wartość napięcia
U2
na zaciskach rezystora
R
czwórnika RC,
przedstawionego na rys. 5.8b, po upływie 10 sek. od skokowej zmiany napięcia U1 o
wartości 2 V, zakładając zerowe warunki początkowe oraz R 1 M, C 10 F.
Rozwiązanie
Wyznaczmy równanie ruchu elementu.
Przez kondensator i przez rezystor płynie prąd o takim samym natężeniu I , zatem
można napisać
I (t ) C
d U1 (t ) U 2 (t ) U 2 (t )
dt
R
Po przekształceniu otrzymuje się
RC
dU 2 (t )
dU (t )
U 2 (t ) RC 1 .
dt
dt
Jest to równanie elementu różniczkującego rzeczywistego o stałych czasowych
T Td RC 10 sek. (wzmocnienie dynamiczne kd 1 ).
Odpowiedź skokowa elementu ma postać
U 2 (t ) U1st e
t
T
Dla t 10 sek., U 2 0,364 2 V = 0,728 V.
Ćwiczenie 5.8
Rys. 5.10 przedstawia asymptotyczną logarytmiczną charakterystykę amplitudowo –
fazową członu różniczkującego rzeczywistego. Określić stałą czasową Td działania
różniczkującego, stałą czasową T inercji oraz wzmocnienie dynamiczne k d .
90
Rys. 5.10. Rysunek do ćwiczenia 5.8
Odp.: Td 3,33 sek., T 0,33 sek., kd 10 .
Ćwiczenie 5.9
Rys. 5.11 przedstawia odpowiedź skokową rzeczywistego elementu różniczkującego o
transmitancji operatorowej G ( s)
T s
y( s)
d . Wyznaczyć stałą czasową Td
u ( s) Ts 1
działania różniczkującego, stałą czasową T inercji oraz wzmocnienie dynamiczne k d .
Rys. 5.11. Rysunek do ćwiczenia 5.9
Odp.: Td 15 sek., T 3 sek., k d 5 .
5.1.6. Człon oscylacyjny
Rozpatrzmy właściwości członu oscylacyjnego, wykorzystując równanie ruchu
w postaci
d 2 y (t )
dy(t )
20
02 y (t ) k02 u (t )
2
dt
dt
(5.12)
Charakterystykę statyczną członu oscylacyjnego opisuje równanie
y k u
(5.13)
Poddając równanie ruchu transformacji Laplace’a przy zerowych warunkach
początkowych, otrzymuje się transmitancję operatorową
91
G( s)
y( s)
k02
2
u ( s ) s 20 s 02
(5.14)
Korzystając z tablicy transformat wyznaczmy charakterystykę skokową
1
k02
y (t ) L ust 2
2
s s 20 s 0
1
1
k ust 1
e 0t sin (0 1 2 t
2
1
12
gdzie arc tg
) ,
.
(5.15)
(5.16)
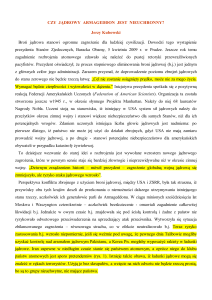
Odpowiedź skokową członu oscylacyjnego dla 0 1 pokazano na rys. 5.12.
Rys. 5.12. Odpowiedź skokowa członu oscylacyjnego
Z równania (5.15) wynika, że odpowiedź skokowa jest różnicą funkcji stałej o wartości
k ust i sinusoidy A sin(0 1 2 t ) , której:
-
amplituda A maleje wykładniczo w funkcji czasu
A k ust
-
1
1
2
e 0t
(5.17)
okres oscylacji
Tosc
2
0 1 2
(5.18)
rośnie wraz ze wzrostem współczynnika tłumienia od wartości 2 / 0 przy
0 do nieskończoności przy 1 ,
-
dodatnie przesunięcie fazowe
92
12
arc tg
względem sinusoidy sin 0 1 2 t
przy wzroście tłumienia maleje od
wartości / 2 przy 0 do zera przy 1 .
Wpływ wartości współczynnika tłumienia na charakter odpowiedzi skokowej ilustruje
rys. 5.13.
Rys. 5.13. Wpływ wartości współczynnika tłumienia na charakter odpowiedzi
skokowej członu oscylacyjnego
Na podstawie odpowiedzi skokowej można wyznaczyć parametry 0 , i k
członu.
Wyznaczając stosunek amplitud odległych od siebie o okres oscylacji Tosc
1
1
A2 k u st
e 0 ( t1 Tosc )
1 2
A1 k u st
1
2
e 0 t1
(5.19)
gdzie t1 to chwila, w której występuje amplituda A1 , otrzymuje się
1
A
ln 1 0
Tosc A2
(5.20)
Oznaczając wartość lewej strony równania (5.20) przez , otrzymuje się zależność
/ 0
Z zależności (5.21) i (5.18) wynika wzór
(5.21)
93
2
2
2
0
T
osc
(5.22)
umożliwiający wyznaczenie pulsacji 0 na podstawie danych doświadczalnych. Znając
wartość 0 , z zależności (5.21) wyznacza się wartość współczynnika tłumienia .
A więc, mierząc okres oscylacji i dwie kolejne amplitudy, można wyznaczyć pulsację
0 i współczynnik tłumienia , a na podstawie ustalonej wartości odpowiedzi –
wzmocnienie k .
Wykorzystując zależność s j , na podstawie transmitancji operatorowej (5.14)
otrzymuje się transmitancję widmową członu oscylacyjnego
G ( j )
k02
k02
2 2 j0 02
(02 2 ) j 20
k 2 [( 2 2 ) j 20 ]
02 0 2 2
,
(0 ) (20 ) 2
(5.23)
skąd
P( )
k02 (02 2 )
(02 2 ) 2 ( 20 ) 2
(5.24)
Q( )
2k03
(02 2 ) 2 (20 ) 2
(5.25)
oraz
G( j ) M ( )
k02
(02 2 ) 2 (20 ) 2
(5.26)
L( ) [20 lg k02 20 lg (02 2 ) 2 (20 ) 2 ] [dB]
arg G ( j ) ( ) arctg
20
02 2
(5.27)
(5.28)
Przebiegi charakterystyk częstotliwościowych członu oscylacyjnego zależą od wartości
współczynnika tłumienia, co ilustruje rys. 5.14. Ze względu na ich złożony kształt, w
praktyce wykorzystuje się charakterystyki logarytmiczne asymptotyczne.
94
a)
b)
Rys. 5.14. Charakterystyki częstotliwościowe członu oscylacyjnego: a) charakterystyki
amplitudowo – fazowe, b) charakterystyki logarytmiczne
Asymptotyczna logarytmiczna charakterystyka amplitudowa składa się z dwóch
półprostych, określonych równaniami:
-
dla 0 jest to równanie linii prostej równoległej do osi odciętych
L( ) 20 lg k [dB],
-
(5.29)
dla 0 jest to równanie linii prostej o nachyleniu -40 dB na dekadę
L( ) (20 lg k 40 lg
) [dB].
0
(5.30)
Tworzące charakterystykę asymptotyczną części tych linii stykają się przy 0 .
Asymptotyczna logarytmiczna charakterystyka fazowa członu oscylacyjnego składa
się z dwóch półprostych ( ( ) 0 i ( ) ), równoległych do osi rzędnych i
łączącego je odcinka linii prostej, pokrywającego się z charakterystykami
rzeczywistymi w punkcie ich przegięcia o współrzędnych ( 0 , / 2 ).
Podobnie jak w przypadku członów inercyjnych, stosowane są dwie metody
wykreślanie środkowego odcinka charakterystyki asymptotycznej - metoda siecznej
95
albo metoda stycznej. Metoda siecznej polega na połączeniu odcinkiem prostej punktów
o współrzędnych ( 0,10 , 0) i ( 100 , ), metoda stycznej – punktów (
1
0 , 0) i
4,81
( 4,810 , ) (linia przechodząca przez te punkty jest styczną do rzeczywistej
logarytmicznej charakterystyki fazowej dla 1 w punkcie przegięcia).
Na rys. 5.15 przedstawiono przykłady urządzeń, które przy odpowiednich
założeniach, mogą być traktowane jako elementy oscylacyjne.
Rys. 5.15. Przykłady elementów oscylacyjnych: a) zespół masa – tłumik - sprężyna,
b) siłownik pneumatyczny, c) czwórnik RLC
Przykład. 5.12
Wyznaczyć transmitancję operatorową czwórnika RLC przedstawionego na rys. 5.15c.
Rozwiązanie
Wiedząc, że: U 3 (t ) I (t ) R ; U 4 (t ) L
dI (t )
; I (t ) C dU 2 (t ) ,
dt
dt
z zależności
U1 (t ) U 2 (t ) U 3 (t ) U 4 (t )
wynika równanie ruchu elementu oscylacyjnego
d 2U 2 (t ) R dU 2 (t )
1
1
U 2 (t )
U1 (t ) ,
2
dt
L dt
LC
LC
96
w którym 0
1
1
i R
2
LC
C
, k 1.
L
Zatem transmitancja operatorowa czwórnika RLC ma postać
G( s)
02
s 2 20 s 02
Przykład 5.13
Wyznaczyć równanie ruchu elementu wg rys. 5.15b, zakładając, że wielkością
wejściową jest
ciśnienie p wprowadzone do komory siłownika, a wyjściową –
położenie y tłoczyska siłownika. Jaki warunek musi być spełniony, aby skokowa
zmiana wielkości wejściowej wywołała aperiodyczną zmianę wielkości wyjściowej.
Parametry siłownika: powierzchnia efektywna membrany A , sztywność sprężyny C ,
masę części ruchomych siłownika m ,
współczynnik tarcia lepkiego w dławicy
siłownika B .
Rozwiązanie
Zależność wielkości wyjściowej od wejściowej wynika z równania równowagi sił
działających na ruchome części siłownika. Siła
wynikająca z działania ciśnienia
(nadciśnienia) p na powierzchnię A membrany, ściskając sprężynę o sztywności C ,
powoduje wysuwanie tłoczyska o wartość y od stanu początkowego. Sile ciśnieniowej,
oprócz siły sprężyny C y , przeciwstawia się siła bezwładności zespołu wprawianego
d 2 y (t )
dy(t )
w ruch m
oraz siła tarcia B
. Równanie równowagi sił ma postać
2
dt
dt
m
d 2 y (t )
dy(t )
B
Cy(t ) Ap (t )
2
dt
dt
lub po przekształceniu
d 2 y (t ) B dy(t ) C
A
y (t ) p (t )
2
dt
m dt
m
m
Jest to równanie ruchu elementu oscylacyjnego, w którym 0
k
C
1 B
i
,
m
2 mC
A
.
C
Aby przebieg przejściowy był aperiodyczny musi być spełniony warunek
1
2
B
1
mC
97
Spełnienie tego warunku zapewni mniejsze zużywanie się części ruchomych siłownika.
Ćwiczenie 5.10
Wyznaczyć równanie ruchu elementu wg rys. 5.15a zakładając, że wielkością
wejściową jest siła F działająca na tłoczysko, a wyjściową – położenie y zespołu
ruchomego.
Odp.: m
d 2 y (t ) A2 dy(t )
Cy(t ) F (t ) .
dt 2
k dt
Ćwiczenie 5.11
Rys. 5.16 przedstawia wykres odpowiedzi skokowej elementu oscylacyjnego o
transmitancji G ( s)
y(s)
k02
2
. Wyznaczyć parametry tego elementu.
u ( s) s 20 s 02
Rys. 5.16. Rysunek do ćwiczenia 5.11
Odp.: k 2,5 , 0 1 rad/s, 0,2 .
5.1.7. Człon opóźniający
Człon opóźniający odtwarza na wyjściu przebieg wielkości wejściowej u(t ) ze stałym
opóźnieniem T0 (zwanym opóźnieniem transportowym), co wyraża równanie ruchu:
y(t ) u (t T0 )
(5.31)
Poddając obie strony równania (5.31) przekształceniu Laplace’a i wykorzystując
twierdzenie o przesunięciu w dziedzinie rzeczywistej, otrzymuje się transmitancję
operatorową:
G ( s)
y(s)
e T0 s
u (s)
(5.32)
98
Zestawienie charakterystyk członu opóźniającego zawiera tabl. 5.8.
Tabl. 5.8. Charakterystyki członu opóźniającego
Równanie ruchu y(t ) u (t T0 )
Charakterystyka statyczna
yu
Transmitancja operatorowa
y( s)
G ( s)
e T0 s
u ( s)
Odpowiedź skokowa
1
y (t ) L1[ust e T0 s ] ust 1(t T0 )
s
Transmitancja widmowa
G ( j ) e jT0
P( ) cos(T0 )
Q( ) sin( T0 )
Logarytmiczna charakterystyka
amplitudowa
M ( ) 1
L( ) 0 [dB]
Logarytmiczna charakterystyka fazowa
Q( )
( ) arctg
T0
P( )
99
Elementami opóźniającymi są najczęściej urządzenia do transportu substancji.
Przykład takiego urządzenia – przenośnika taśmowego przedstawia rys. 5.17.
Rys. 5.17. Schemat przenośnika taśmowego
Jeżeli jako wielkość wejściową będziemy traktować strumień masy Q1 materiału
sypkiego na początku transportera, a wielkością wyjściową strumień masy Q2 na
końcu transportera, to zależność wielkości wyjściowej od wejściowej ma postać
Q2 (t ) Q1 (t
V
)
L
gdzie: V - prędkość taśmy transportera, L - długość drogi przenoszenia substancji.
Jest to więc równanie ruchu elementu opóźniającego z czasem opóźnienia T0
V
.
L
5.2. Elementy wielowejściowe
Dotychczas omawiane elementy o jednym sygnale wejściowym i jednym
wyjściowym przedstawiane są na schematach blokowych w postaci jednego bloku.
Sposób przedstawiania elementów o kilku sygnałach wejściowych wyjaśniono na
przykładach.
Przykład 5.10
Wielkościami wejściowymi elementu (rys. 5.27a) są przesunięcia x1 i x2 względem
określonych pozycji początkowych, a wielkością wyjściową - przesunięcie y.
a)
b)
Rys. 5.27. Dźwignia jako element o dwóch sygnałach wejściowych: a) – schemat
ideowy, b) - schemat blokowy
100
Wykorzystując zasadę superpozycji, sygnał wyjściowy elementu można traktować jako
sumę przesunięcia y1 (t ) wywołanego sygnałem x1 (t ) gdy x2 0
y1 (t )
b
x1 (t )
ab
i przesunięcia y2 (t ) wywołanego sygnałem x2 (t ) gdy x1 0
y2 (t )
a
x2 (t )
ab
Równanie ruchu elementu, wyrażające zależność sygnału wyjściowego od sygnałów
wejściowych, ma postać
y (t ) y1 (t ) y2 (t )
b
a
x1 (t )
x2 (t )
ab
ab
Po wykonaniu przekształcenia Laplace’a otrzymuje się równanie
y( s)
b
a
x1 ( s)
x2 ( s) ,
ab
ab
któremu odpowiada schemat blokowy przedstawiony rys. 5.27b.
Rozważana
dźwignia
jest
elementem
proporcjonalnym
o
dwóch
sygnałach
wejściowych.
Przykład 5.14
Wielkościami wejściowymi serwomotoru hydraulicznego (rys. 5.28a) są przesunięcia
x1 i x2 odpowiednio tłoczków i korpusu rozdzielacza względem określonej pozycji
początkowej w ustalonym stanie układu, a wielkością wyjściową - przesunięcie y tłoka
siłownika .
a)
b)
Rys. 5.28. Serwomotor hydrauliczny o dwu sygnałach wejściowych: a) – schemat
ideowy, b) - schemat blokowy
101
Zgodnie z ustaleniem w p. 5.1.3, dla rozważanego serwomotoru obowiązuje równanie
ruchu
T
dy(t )
u (t )
dt
gdzie u jest odchyleniem suwaka rozdzielacza od pozycji, w której szczeliny
doprowadzające olej do siłownika są zamknięte. Przyjmując pokazane na rysunku
kierunki przemieszczeń tłoczków i korpusu rozdzielacza jako dodatnie, odchylenie u
jest sumą odchyleń x1 i x2 . Równanie ruchu można więc zapisać w postaci
T
dy(t )
x1 (t ) x2 (t )
dt
Po wykonaniu przekształcenia Laplace’a z uwzględnieniem zerowych warunków
początkowych, otrzymuje się równanie
Ts y ( s ) x1 ( s ) x2 ( s )
skąd wynika zależność
y ( s ) [ x1 ( s ) x2 ( s )]
1
,
Ts
którą wyraża schemat blokowy przedstawiony na rys. 5.28b.
Przykład 5.15
Wielkościami wejściowymi elementu przedstawionego na rys. 5.29 są przemieszczenia
x1 cylindra i x2 końca sprężyny względem określonej pozycji początkowej w
ustalonym stanie układu, a wielkością wyjściową - przemieszczenie y tłoka.
a)
b)
Rys. 5.29. Dwuwejściowy element hydrauliczny: a) schemat ideowo-konstrukcyjny, b)
schemat blokowy (A – powierzchnia czynna tłoka, C – sztywność sprężyny, Q –
strumień objętości oleju przepływającego przez zwężkę, - stała zwężki )
102
Zgodnie z zasadą superpozycji, wielkość wyjściowa jest sumą wyników
oddziaływań na element wielkości x1 i wielkości x2 .
Oznaczmy wynik oddziaływania przemieszczenia x1 (gdy x2 0 ) na element jako y1 .
Korzystając z ustaleń w przykładzie 5.10, można napisać
A2 dy1 (t )
A2 dx1 (t )
y1 (t )
C dt
C dt
(5.56)
Oznaczając wynik oddziaływania przemieszczenia x2 (gdy x1 0 ) na element jako y 2
i korzystając z ustaleń z przykładu 5.4, można napisać
A2 dy2 (t )
y2 (t ) x2 (t )
C dt
(5.57)
Dla przyjętych jako dodatnie, pokazanych na rysunku kierunków przemieszczeń x1 i
x2 , jest
y (t ) y1 (t ) y2 (t )
i także
y ( s ) y1 ( s ) y2 ( s )
(5.58)
Poddając równania (5.56) i (5.57) transformacji Laplace’a przy zerowych warunkach
początkowych można wyznaczyć transformaty y1 ( s ) i y2 ( s )
y1 ( s)
Ts
x1 ( s)
Ts 1
(5.59)
y2 ( s )
1
x2 ( s )
Ts 1
(5.60)
gdzie T
A2
.
C
Ostatecznie na podstawie zależności (5.58), (5.59) i (5.60) otrzymuje się równanie
y(s)
Ts
1
x1 ( s )
x2 ( s ) ,
Ts 1
Ts 1
któremu odpowiada schemat blokowy przedstawiony na rys. 5.29b.
Przykłady kilku innych elementów wielowejściowych przedstawia rys. 5.30.
103
Rys. 5.30. Schematy
ideowo – konstrukcyjne elementów wielowejściowych ; a)
schemat sztywnej kaskady pneumatycznej,
b) schemat elastycznej
kaskady
hydraulicznej, c), d)
układy mechaniczne