Temat: Podział maszyn prądu stałego i ich zastosowanie.
1. Maszyny prądu stałego mogą mieć zastosowanie jako prądnice i jako silniki.
Silniki prądu stałego wykazują dobre właściwości regulacyjne. Umożliwiają one płynną zmianę prędkości
w szerokich granicach oraz mogą ruszać pod dużym obciążeniem. Z tych względów są dość powszechnie
stosowane w napędach :
maszyn wyciągowych;
maszyn walcowniczych;
trakcji elektrycznej;
układów automatyki.
Prądnice prądu stałego są obecnie coraz rzadziej stosowane, gdyż wypierają je przetwornice tyrystorowe
o znacznie większej sprawności i łatwiejsze w eksploatacji.
Obecnie produkuje się maszyny prądu stałego o mocach od kilku watów do ok. 10 MW. Typowe napięcia to: 120,
230, 440, 500, 1000 V, a nierzadko wyższe, sięgające kilku kilowoltów.
2. Zasada działania maszyny prądu stałego.
a) prądnica
Rozpatrywać będziemy model elementarny składający się z jednego zwoju obracającego się między dwoma
biegunami magnesu. Początek i koniec zwoju są połączone z dwoma pierścieniami ślizgowymi, po których
ślizgają się szczotki odprowadzające prąd do zamkniętego obwodu zewnętrznego (rys.8.1).
Jeżeli zwój znajdujący się w polu magnetycznym o indukcji B obracamy z prędkością v, to w jego bokach
o długości l indukuje się sem o wartości:
∙ ∙
∙
i kierunku zgodnym z regułą prawej dłoni.
Jeżeli obwód tego zwoju będzie zamknięty (przez szczotki i pierścienie ślizgowe), to popłynie w nim prąd
o kierunku zgodnym ze zwrotem indukowanej siły elektromotorycznej. Na rys. 8.2 zaznaczono kierunki prądu
w bokach 1 i 2 zezwoju przy różnych położeniach tych boków (kropka oznacza kierunek do nas, krzyżyk od nas).
str.1 Jeżeli w analizowanej prądnicy dwa pierścienie zastąpimy dwoma półpierścieniami (rys. 8.3), po których ślizgają
się szczotki, to analizując rys. 8.4 zauważamy, że szczotka S1 zawsze zbiera napięcie z boku znajdującego się
pod biegunem N, a szczotka S2 zawsze z boku znajdującego się pod biegunem S. Tak więc na szczotkach S1
i S2 będzie zawsze napięcie jednokierunkowe. Półpierścienie tworzą komutator, a jeden półpierścień stanowi
wycinek komutatora.
Nazwa komutator pochodzi stąd, że komutuje on, czyli zmienia, kierunek prądu. Komutator (mechaniczny
prostownik prądu).
str.2 Aby otrzymać napięcie o dostatecznej równomierności, w polu biegunów umieszcza się nie jeden zwój, ale wiele
zwojów, z których każdy łączy się z odpowiednim wycinkiem komutatora. Na rys. 8.5 pokazano rozmieszczenie
dwóch zwojów między biegunami i połączenie ich z czterema wycinkami komutatora, a także przebieg sem
w każdym zezwoju oraz linią pogrubioną przebieg sem na szczotkach.
Zwiększenie liczby wycinków komutatora wpływa na to, że przebieg napięcia odbieranego z prądnicy jest bardziej
równomierny.
Prądnica prądu stałego w istocie działania jest prądnicą prądu przemiennego, taką samą, jak prądnica
synchroniczna, tylko wyposażoną w komutator. W stosunku do prądnicy synchronicznej zmienione zostały role
wirnika i stojana: w maszynie prądu stałego wirnik jest twornikiem (w nim wytwarza się napięcie), a stojan jest
magneśnicą, w prądnicy synchronicznej najczęściej jest odwrotnie.
b) silnik
Jeżeli do uzwojenia twornika (wirnika) maszyny prądu stałego doprowadzimy napięcie, to popłynie w nim prąd
i twornik zacznie się obracać w wyniku oddziaływania pola magnetycznego na przewodniki (uzwojenie) z prądem.
Maszyna będzie wówczas przetwarzała energię elektryczną w mechaniczną, będzie silnikiem.
3. Budowa maszyn prądu stałego.
Każda maszyna prądu stałego składa się z dwóch podstawowych części:
nieruchomego stojana;
wirującego wirnika.
Stojan najczęściej jest magneśnicą, gdyż w nim jest wytwarzane pole magnetyczne. W skład nieruchomego
stojana wchodzą następujące elementy:
str.3 jarzmo;
bieguny główne z uzwojeniem wzbudzającym;
bieguny pomocnicze (komutacyjne) z uzwojeniem;
tarcze łożyskowe;
trzymadła szczotkowe (rys. 8.6)
Jarzmo stojana będące najczęściej odlewem żeliwnym lub staliwnym, spełnia dwie role:
jednocześnie jest częścią obwodu magnetycznego i elementem konstrukcyjnym spełniającym rolę
kadłuba, do którego są przymocowane pozostałe elementy wchodzące w skład stojana.
W maszynach prądu stałego, z wyjątkiem małych maszyn,, pole magnetyczne jest wytwarzane przez
elektromagnes, którego uzwojenie jest umieszczone na biegunach głównych. Pole magnetyczne w rdzeniu
bieguna jest praktycznie stałe, ale w nabiegunniku występuje pewna pulsacja strumienia spowodowana przez
otwarte żłobki wirnika.
Aby zmniejszyć straty wiroprądowe nabiegunniki i rdzenie biegunów wykonuje się z pakietu blach.
Bieguny pomocnicze są elektromagnesami, których uzwojenie jest umieszczone na litym, rzadziej pakietowym,
rdzeniu stalowym. Uzwojenie tych biegunów jest zawsze połączone szeregowo z uzwojeniem twornika.
Wirnik jest najczęściej twornikiem. W jego skład wchodzą:
rdzeń wykonany ze względu na prądy wirowe z pakietu blach (rys. 8.7);
uzwojenie twornika umieszczone w żłobkach rdzenia;
komutator (rys. 8.8.).
str.4 Komutator jest osadzony na wale wirnika, składa się z wielu wycinków miedzianych umieszczonych na specjalnej
piaście (rys. 8.8).
Wycinki komutatora są izolowane od siebie mikanitem. Muszą być one także odizolowane od piasty. Komutatory
powinny być wykonane bardzo starannie. Są one najbardziej pracochłonnym i najdroższym elementem
w maszynie prądu stałego.
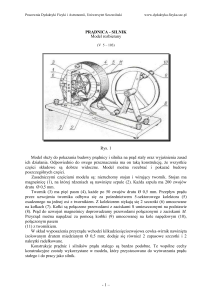
Widok ogólny maszyny prądu stałego przedstawia rys. 8.9.
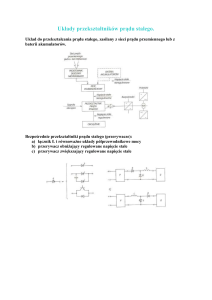
str.5 Temat: Podstawowe układy połączeń.
1. Najczęściej pola magnetyczne w maszynach prądu stałego są wytwarzane przez
elektromagnesy, których uzwojenie jest zasilane prądem stałym zwanym prądem
wzbudzenia. Stąd w maszynach prądu stałego można mówić o trzech prądach, są to:
prąd twornika Ia;
prąd wzbudzenia If;
prąd obciążenia I (oddawany do sieci lub pobierany z sieci).
2. Podstawowymi wielkościami opisującymi maszynę prądu stałego są:
U – napięcie twornika (wytwarzane w prądnicy, zasilające w silniku);
Ra – rezystancja obwodu twornika;
Rf – rezystancja obwodu wzbudzenia;
E – siła elektromotoryczna indukowana w tworniku;
n – prędkość wirowania wirnika;
M – moment elektrodynamiczny.
3. Maszyna obcowzbudna.
Maszyną obcowzbudną nazywamy taką maszynę, w której uzwojenie wzbudzające jest
zasilane z oddzielnego źródła, innego niż uzwojenie twornika (rys. 8.10a).
4. Maszyna samowzbudna.
Maszyną samowzbudną nazywamy taką maszynę, w której uzwojenie wzbudzające jest
zasilane z tego samego źródła co uzwojenie twornika (silnik) lub jest zasilane napięciem
twornika (prądnice).
str.1 5. W zależności od sposobu połączenia uzwojenia wzbudzające i uzwojenia twornika,
rozróżnia się maszyny samowzbudne:
bocznikowe (rys. 8.10b), w których uzwojenie wzbudzające jest połączone równolegle
(jest zbocznikowane) z uzwojeniem twornika;
szeregowe (rys. 8.10c), w których uzwojenie wzbudzające jest połączone szeregowo
z uzwojeniem twornika;
szeregowo-bocznikowe (rys. 8.10d), w których uzwojenie wzbudzające składa się
z dwóch części, z których jedna jest połączona szeregowo, a druga równolegle
z uzwojeniem twornika.
6. Oprócz uzwojenia twornika i uzwojenia wzbudzającego w wielu maszynach prądu stałego
znajdują się tzw. uzwojenia pomocnicze. Są to uzwojenia:
biegunów komutacyjnych;
kompensacyjne.
7. Oznaczenie końcówek uzwojeń maszyn prądu stałego przedstawiono w tabeli 8.1.
str.2 Temat: Uzwojenia maszyn prądu stałego.
1. Uzwojenia maszyn prądu stałego.
W jednej maszynie prądu stałego możemy spotkać trzy rodzaje uzwojeń:
a) uzwojenie biegunów głównych jest uzwojeniem wzbudzającym
jego zadaniem jest wytworzenie głównego pola magnetycznego w maszynie,
uzwojenia biegunów są wykonane zawsze tak samo, w postaci cewki nałożonej na
biegun,
jeżeli pole magnetyczne w maszynie jest wytworzone przez magnes trwały, to nie ma
w niej uzwojenia wzbudzającego.
b)
uzwojenie biegunów komutacyjnych
służy do poprawy warunków pracy maszyny,
wykonane jest podobnie do uzwojenia biegunów głównych,
nie występuje w maszynach małej mocy.
c) uzwojenie twornika
jest umieszczone na wirniku,
od sposobu wykonania tego uzwojenia zależy wartość napięcia w prądnicy lub
wartość momentu w silniku,
2. Wielkości charakterystyczne dla uzwojeń tworników.
str.1 obecnie uzwojenia tworników wykonuje się jako uzwojenia bębnowe,
powstaje ono w wyniku ułożenia w żłobkach twornika przewodu miedzianego jako
nieprzerwanego obwodu,
zasadniczym elementem tego obwodu jest zwój składający się z dwóch boków
czynnych i połączeń czołowych (rys. 8.11),
pewna liczba zwojów połączonych szeregowo i ułożonych w tej samej parze żłobków
tworzy zezwój,
zezwój może być jednozwojowy (rys. 8.12a) lub wielozwojowy (rys. 8.12b),
liczbę boków zezwojów w jednym żłobku oznacza się literą u,
zezwoje łączy się ze sobą w obwód zamknięty poprzez wycinki komutatora,
każdy zezwój jest połączony z dwoma wycinkami komutatora (rys. 8.12 i 8.13),
do każdego wycinka komutatora są dołączone dwa końce dwóch różnych zezwojów.
a) W zależności od sposobu połączenia uzwojeń z komutatorem rozróżnia się dwa
podstawowe rodzaje uzwojeń:
pętlicowe (rys. 8.12),
faliste (rys. 8.13).
Zarówno uzwojenia pętlicowe, jak i faliste mogą być wykonane jako tzw. proste lub
wielokrotne.
Każdy zezwój powinien mieć taką rozpiętość, aby dwa jego boki były obejmowane przez taki
sam strumień magnetyczny, czyli boki powinny znajdować się w jednakowym położeniu
w stosunku do sąsiednich biegunów o przeciwnych znakach. Rozpiętość zezwoju powinna
być równa podziałce biegunowej
lub trochę od niej mniejsza.
Rozpiętość zezwoju określa się jako poskok żłobkowy YQ, który mierzy się liczbą odległości
międzyżłobkowych, między dwoma bokami jednego zezwoju (rys. 8.14).
Uzwojenie średnicowe występuje gdy YQ =
Uzwojenie cięciwowe występuje gdy
str.2 b) zestawienie wszystkich wielkości charakterystycznych
i występujące między nimi zależności:
Q
- liczba żłobków na tworniku
K=z
- liczba wycinków komutatora
z = Qu
- liczba boków zezwojów na tworniku
u
- liczba boków zezwoju na żłobek i warstwę
opisujących
uzwojenia
- podziałka biegunowa wyrażona w jednostkach długości
- podziałka biegunowa wyrażona liczbą żłobków
Nc
- zwojność zezwoju (liczba zwojów w zezwoju)
N
- liczba zwojów połączonych w szereg
Yc
- poskok komutatorowy
YQ
- poskok żłobkowy
Y1 = uYQ+1
- poskok częściowy pierwszy
Y2
- poskok częściowy drugi
Y=Y1±Y2; Y=2Yc
- poskok całkowity
3. Symetria uzwojenia i ustawienie szczotek.
szczotki odbierające prąd dzielą uzwojenie na gałęzie równoległe (liczba gałęzi
równoległych zależy od rodzaju uzwojenia),
aby maszyna prądu stałego mogła prawidłowo pracować, między gałęziami
równoległymi uzwojenia nie mogą płynąć żadne prądy wyrównawcze,
aby to było możliwe, uzwojenie musi spełniać tzw. warunki symetrii uzwojenia, które
są następujące:
w każdej gałęzi równoległej musi być taka sama liczba boków
liczba boków uzwojenia twornika musi być podzielna przez liczbę gałęzi
równoległych, czyli: K/a = liczbie całkowitej
każdemu bokowi jednej gałęzi musi odpowiadać bok każdej innej gałęzi
o takim samym indukowanym w nim napięciu przy takiej samej indukcji
Q/a = liczbie całkowitej
odpowiednie boki wszystkich gałęzi równoległych powinny być rozmieszczone
w jednakowych polach
na każdą gałąź musi przypadać taka sama liczba biegunów
2p/a = liczbie całkowitej
str.3
ponadto muszą być spełnione dodatkowe warunki:
elektryczne
każdy zezwój musi mieć taką samą liczbę zwojów
w każdym żłobku musi być taka sama liczba boków
każdy zezwój musi mieć taki sam poskok
magnetyczne
indukcja magnetyczna musi mieć taki sam rozkład pod każdym
biegunem
mechaniczne
grubość wycinków komutatora musi być jednakowa
szczelina powietrzna musi być jednakowa pod wszystkimi biegunami
podziałka biegunowa musi mieć stałą wartość
dla pracy maszyny prądu stałego nie jest obojętne ustawienie szczotek
szczotki umieszcza się w taki sposób by zwierały zezwój wtedy, gdy nie indukuje się
w nim napięcie (strefa neutralna)
strefa neutralna to strefa między biegunami, gdzie indukcja magnetyczna jest równa
zeru
niewłaściwe położenie szczotek to takie, w którym oś szczotek pokrywa się z osią
neutralną maszyny
aby należycie wykorzystać uzwojenie, szczotek powinno być tyle, ile jest biegunów
4. Rodzaje uzwojeń.
a) uzwojenie pętlicowe proste (równoległe)
uzwojenie pętlicowe nazywa się prostym, gdy Yc = 1, tzn. gdy oba zezwoje
następujące po sobie leżą tuż koło siebie i nie są oddzielone zezwojami należącymi
do innego uzwojenia,
uzwojenie pętlicowe charakteryzuje się tym, że 2a = 2p (liczba gałęzi równoległych
jest równa liczbie biegunów),
szczotka jest nieco szersza niż wycinek komutatora
b) uzwojenie pętlicowe wielokrotne
jeżeli prąd twornika jest znaczny w stosunku do napięcia, to w przypadku stosowania
uzwojenia pętlicowego prostego należałoby zwiększyć liczbę biegunów, aby
zwiększyć liczbę gałęzi równoległych w uzwojeniu,
uzwojenie pętlicowe dwukrotne 2a = 4p i Yc = 2
oznacza to, że między sąsiednimi bokami tego samego zezwoju jest umieszczony
bok drugiego uzwojenia, takiego jak poprzednie,
szerokość szczotki w przypadku zastosowania uzwojenia dwukrotnego jest większa
niż szerokość dwóch wycinków komutatora.
c) uzwojenie faliste proste
str.4 w uzwojeniu falistym, każda gałąź równoległa leży pod wszystkimi biegunami, co
eliminuje asymetrię indukowanych sił elektromotorycznych,
uzwojenie to ma zawsze dwie gałęzie równoległe, niezależnie od liczby biegunów,
zezwoje są łączone szeregowo, stąd uzwojenia faliste noszą nazwę uzwojeń
szeregowych
d) uzwojenie faliste wielokrotne
str.5 liczba gałęzi równoległych tego uzwojenia nie zależy od liczby biegunów i może być
dobrana w granicach 2 < 2a 2p
uzwojenie to ma cechy uzwojenia falistego prostego, a różni się od niego liczbą
gałęzi,
powstaje z pojedynczych uzwojeń falistych prostych, przy czym stosuje się tyle tych
uzwojeń, ile ma być par gałęzi równoległych, gdyż każde uzwojenie faliste ma 2
gałęzie równoległe.
Temat: Zjawiska towarzyszące pracy maszyn prądu stałego – oddziaływanie twornika, komutacja,
straty mocy.
1. Oddziaływanie twornika.
Pole magnetyczne wytwarzane przez magnes trwały lub elektromagnes nie jest jedynym polem
magnetycznym wytwarzanym w maszynie. Nazywa się je polem magnetycznym głównym. Obraz tego pola
oraz rozkład indukcji na obwodzie maszyny przedstawiono na rys. 8.26.
- pod biegunami indukcja ma wartość stałą,
- w strefie neutralnej, gdzie znajdują się szczotki, indukcja jest równa zeru.
Taki rozkład pola magnetycznego występuje tylko w jednym szczególnym stanie pracy maszyny prądu
stałego, a mianowicie wtedy gdy maszyna pracuje bez obciążenia.
Jeżeli maszyna jest obciążona, to w uzwojeniu twornika (wirnika) płynie prąd Ia i w związku z tym wokół
uzwojeń twornika wytwarza się pole magnetyczne twornika. Obraz tego pola przedstawiono na rys. 8.27.
str.1
Strumień twornika, nakładając się na strumień główny, zniekształca go dając pewien strumień wypadkowy,
którego obraz przedstawiono na rys. 8.28.
Zniekształcenie głównego pola magnetycznego przez pole magnetyczne twornika jest nazywane
oddziaływaniem twornika.
Zniekształcenie przebiegu indukcji pod biegunami powoduje, że w niektórych zezwojach znajdujących się
w polu o większej indukcji, indukuje się większe napięcie niż przy biegu jałowym; może to być powodem
zwiększenia napięcia międzywycinkowego do takiej wartości, że wystąpi iskrzenie na komutatorze.
Przesunięcie osi neutralnej powoduje, że w osi poprzecznej gdzie są umieszczone szczotki, występuje pole
magnetyczne o pewnej indukcji magnetycznej, a więc w zwojach zwartych przez szczotkę indukuje się
napięcie, co powoduje przepływ znacznego prądu w tych obwodach i pojawienie się iskrzenia pod
szczotkami.
Zmniejszenie strumienia powoduje spadek indukowanego napięcia.
2. Komutacja.
Zezwój, przemieszczając się ze strefy jednego bieguna głównego, wchodzi w strefę neutralną, w której
znajdują się szczotki. Przechodzi z jednej gałęzi równoległej do drugiej i wtedy następuje w nim zmiana
kierunku prądu na przeciwny.
Zmiana kierunku prądu następuje więc w chwili, gdy zezwój jest zwierany przez szczotkę (rys. 8.33).
str.2
Proces zmiany kierunku prądu w zezwoju i występujący przy tym zespół zjawisk nazywamy komutacją.
Zła komutacja wywołuje iskrzenie, które może być przyczyną zniszczenia szczotek i komutatora.
Rozróżnia się mechaniczne i elektryczne przyczyny iskrzenia szczotek:
do przyczyn mechanicznych zaliczamy przede wszystkim: nierówności powierzchni,
zanieczyszczenie lub niecentryczność komutatora, złe przyleganie szczotek, drgania szczotek itp.
do przyczyn elektrycznych zaliczamy przede wszystkim: gęstość prądu na styku między szczotką
a komutatorem.
Komutacja opóźniona.
Komutację nazywamy opóźnioną, jeśli w połowie okresu komutacji prąd jest większy od zera. Czynnikiem
który dodatkowo opóźnia komutację jest oddziaływanie twornika. Komutacja opóźniona jest bardzo
niekorzystna, gdyż szczotka schodząca z wycinka komutatora w chwili, gdy prąd w cewce nie zdążył
osiągnąć wartości prądu w gałęzi (Ia) może pociągnąć za sobą łuk elektryczny. Jeżeli łuk przedostanie się
na dalsze wycinki, to dojdzie do zwarcia komutatora i zniszczenia maszyny.
Komutacja przyspieszona.
Komutacja przyspieszona to taka, przy której zmiana prądu w cewce następuje w pierwszej połowie okresu
komutacji. Komutację przyspieszoną otrzymamy wówczas gdy w zwartym przez szczotkę zezwoju będzie
indukowana siła elektromotoryczna rotacji. W przypadku prądnicy jej zwrot jest zgodny ze zwrotem siły
elektromotorycznej indukowanej przez ten biegun, pod który przechodzi zezwój po zakończeniu komutacji.
W przypadku silnika zwrot indukowanej siły elektromotorycznej powinien być zgodny ze zwrotem siły
elektromotorycznej indukowanej przez ten biegun, spod którego zezwój wychodzi.
W celu poprawy warunków komutacji w maszynach komutatorowych stosuje się szczotki o znacznej
rezystancji przejścia, są to szczotki węglowo-grafitowe lub grafitowe.
3. Straty i sprawność.
Zjawiskiem niekorzystnym towarzyszącym pracy maszyn prądu stałego jest występowanie strat
i w konsekwencji nagrzewnie się maszyny. Moc oddawana przez maszynę P jest mniejsza od mocy
pobranej Pin o straty.
Stosunek mocy pobranej przez maszynę do mocy oddanej określa sprawność maszyny:
Dla maszyn prądu stałego sprawność wynosi od 0,78 do 0,945.
Straty występujące w maszynach prądu stałego to:
straty w rdzeniu ΔPFE, powstające w obwodzie magnetycznym twornika. Są one funkcją strumienia
magnetycznego i częstotliwości przemagnesowywania obwodu. Straty w rdzeniu wynoszą
(0,05÷0,1)PN;
straty obciążeniowe ΔPobc związane z przepływem prądu przez obwód twornika o rezystancji Rac,
uzwojenie kompensacyjne o rezystancji RK, uzwojenie biegunów komutacyjnych o rezystancji Rb,
uzwojenie szeregowe wzbudzające o rezystancji Rf oraz straty na rezystancji przejścia między
szczotkami a komutatorem, czyli
Δ
str.3
Δ
Straty te dla Ia = IN wynoszą ΔPobc = (0,10÷0,4)PN i zmieniają się przy każdej zmianie obciążenia
(zmianie prądu Ia)
straty wzbudzenia ΔPf w uzwojeniu obcowzbudnym lub bocznikowym. Wynoszą one (0,05÷0,01)PN
straty mechaniczne ΔPm, będące funkcją prędkości wirowania wirnika. Straty te powstają w wyniku
tarcia w łożyskach, tarcia szczotek o komutator i tarcia wentylatora o powietrze. Są one niewielkie
i wynoszą (0,02÷0,005)PN.
Część strat w maszynie zmienia się przy zmianie obciążenia, dlatego też sprawność maszyny prądu
stałego, tak jak i innych maszyn elektrycznych, nie jest wartością stałą. Przebieg sprawności w funkcji
obciążenia przedstawiono na rys. 8.35.
Sprawność silnika podawana w jego danych znamionowych jest zawsze sprawnością przy obciążeniu
znamionowym.
str.4
Temat: Prądnice prądu stałego – obcowzbudne i samowzbudne.
Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości:
U
– napięcie twornika
I(P)
- prąd (moc) obciążenia
It
- prąd wzbudzenia
n
- prędkość obrotowa
Właściwości ruchowe prądnic określa się za pomocą charakterystyk podających związki
między wymienionymi wielkościami. Ze względu na niewielką zmienność prędkości silników
napędowych można uznać, że prądnice pracują praktycznie przy stałej prędkości., dlatego
charakterystyki są sporządzane przy n = const. Charakterystyki te to:
charakterystyka biegu jałowego
charakterystyka obciążenia
charakterystyka zewnętrzna
charakterystyka regulacyjna
E=f(If) przy n=const; Ia=0
U=f(If) przy n=const; I=const
U=f(I) przy n=const; If=const
If=f(I) przy n=const; U=const
1. Prądnica obcowzbudna.
Prądnica obcowzbudna jest maszyną, w której obwód wzbudzenia jest zasilany z obcego
źródła. Schemat połączeń prądnicy obcowzbudnej przedstawiono na rys. 8.39,
a rozmieszczenie uzwojeń w maszynie i ich połączenie z tabliczką zaciskową na rys. 8.36.
Charakterystyki obciążenia wyznacza się dla różnych prądów obciążenia otrzymując całą
rodzinę charakterystyk (rys. 8.41). Charakterystyki te otrzymuje się w wyniku przesunięcia
trójkąta, równolegle wzdłuż charakterystyki magnesowania.
str.1 Jedną z najbardziej przydatnych w eksploatacji charakterystyk jest charakterystyka
zewnętrzna U=f(I) przy n=const i If=const. Pokazuje ona, jak zmienia się napięcie na
zaciskach prądnicy przy zmianie jej obciążenia przy stałej prędkości obrotowej i stałym
prądzie wzbudzenia. Charakterystykę tę można skonstruować na podstawie charakterystyki
biegu jałowego i trójkąta charakterystycznego.
Z przebiegu charakterystyki (rys. 8.42a) widać, że przy przejściu ze stanu jałowego do stanu
obciążenia napięcie na zaciskach prądnicy maleje.
Zmianę napięcia przy zmianie obciążenia od stanu jałowego do obciążenia znamionowego
i określa się według wzoru:
nazywa się zmiennością napięcia
Dla prądnic obcowzbudnych zmienność napięcia nie przekracza 5÷10 %.
str.2 Charakterystyki zewnętrzne można wyznaczyć dla różnych wartości prądu wzbudzenia
i różnych prędkości. Znając je, można określić napięcie i prąd obciążenia w dowolnym stanie
pracy. Wartością charakterystyczną na tej charakterystyce jest prąd zwarciowy, który dla
prądnic obcowzbudnych osiąga wartość 15÷20 IN. Aby napięcie na zaciskach obciążonej
prądnicy pozostawało stałe mimo zmian obciążenia, należy regulować prąd wzbudzenia.
Jak regulować prąd wzbudzenia przy zmianie obciążenia, aby napięcie pozostawało stałe,
pokazuje charakterystyka regulacyjna, czyli zmienność If=f(I) przy U=const i n=const
(rys. 8.24b).
Charakterystykę tę można skonstruować na podstawie charakterystyki biegu jałowego i
trójkąta charakterystycznego.
2. Prądnica bocznikowa.
W prądnicy bocznikowej uzwojenie wzbudzające jest połączone równolegle z uzwojeniem
twornika. Schemat połączeń przedstawiono na rys. 8.43.
Co to jest samowzbudzenie.
Jeżeli w obwodzie magnetycznym istnieje magnetyzm szczątkowy, jako pozostałość po
poprzedniej pracy, to przy napędzaniu wirnika indukuje się w jego uzwojeniu napięcie Esz.
Pod wpływem tego napięcia w uzwojeniu wzbudzającym płynie prąd If, który wytwarza
strumień magnetyczny. Jeżeli kierunek tego strumienia jest zgodny z kierunkiem strumienia
szczątkowego, to strumień w maszynie ulega zwiększeniu, wzrasta napięcie indukowane
i prąd wzbudzenia, co powoduje dalszy wzrost strumienia aż maszyna wzbudzi się do
pełnego napięcia. Gdyby nie było napięcia szczątkowego, procesor wzbudzenia nie mógłby
nastąpić, w takim przypadku należałoby na chwilę zasilić obwód wzbudzenia z obcego źródła
napięcia, aby wytworzyć strumień szczątkowy. Kierunek strumienia wytworzonego przez
prąd wzbudzenia zależy od zwrotu napięcia Esz i sposobu przyłączenia uzwojenia E1-E2 do
zacisków A1-A2, a zwrot napięcia Esz zależy od kierunku wirowania i kierunku strumienia
szczątkowego. Jeżeli więc zmieni się kierunek prędkości lub nieprawidłowo przyłączy się
str.3 uzwojenie wzbudzające, to strumień wytworzony przez prąd wzbudzenia będzie skierowany
przeciwnie niż strumień szczątkowy, co spowoduje, że maszyna się rozmagnesuje.
Proces samowzbudzenia się prądnicy bocznikowej trwa do chwili, gdy wartość napięcia U0
i prądu wzbudzenia If0 ustalą się w tym punkcie, gdzie krzywa U=f(If) i prosta RfIf się
przecinają.
W zależności od rezystancji w obwodzie wzbudzenia Rf prądnica wzbudzi się do
odpowiedniego napięcia (rys. 8.44).
Może być wiele przyczyn niewzbudzenia się prądnicy bocznikowej, m.in.:
brak magnetyzmu szczątkowego;
niewłaściwy kierunek wirowania;
niewłaściwe połączenie obwodu wzbudzenia z obwodem twornika;
przerwa w obwodzie wzbudzenia lub twornika;
zbyt duża rezystancja obwodu wzbudzenia.
Charakterystyka biegu jałowego i charakterystyki obciążenia prądnicy bocznikowej są
analogiczne do charakterystyk prądnicy obcowzbudnej.
Charakterystykę zewnętrzną prądnicy bocznikowej pokazano na rys. 8.45.
Zmienność napięcia prądnicy bocznikowej jest znacznie większa niż prądnicy obcowzbudnej
i wynosi 15÷25 %, a nawet 30 %.
str.4 Przebieg charakterystyki regulacyjnej prądnicy bocznikowej (rys. 8.46) jest uwarunkowany
przebiegiem charakterystyki zewnętrznej.
3. Prądnica szeregowa.
W prądnicy szeregowej uzwojenie wzbudzające jest połączone szeregowo z uzwojeniem
twornika (rys. 8.47). Prąd obciążenia tej prądnicy jest jednocześnie prądem wzbudzenia.
Jak wynika z charakterystyki zewnętrznej napięcie silnika zależy od prądu obciążenia (rys.
8.48).
Jest to niekorzystne i dlatego prądnice szeregowe nie znajdują zastosowania.
str.5 4.Prądnica szeregowo-bicznikowa.
Zaletą prądnicy bocznikowej w porównaniu z obcowzbudną jest to, że nie wymaga ona
oddzielnego źródła do zasilania obwodu wzbudzenia, natomiast wadą jest jej silne
zmniejszanie się napięcia przy wzroście obciążenia. Wadę tę można wyeliminować
wprowadzając oprócz uzwojenia bocznikowego drugie uzwojenie wzbudzające, połączone
szeregowo z twornikiem, a zasilane w taki sposób, aby obydwa przepływy były zgodne.
Prądnicę taką nazywamy szeregowo-bocznikową lub dozwoloną (rys. 8.49).
Przez odpowiedni dobór liczby zwojów uzwojenia szeregowego uzyskuje się taki wzrost
strumienia ze wzrostem prądu obciążenia, że napięcie na zaciskach pozostaje prawie stałe.
Gdyby uzwojenie szeregowe zostało połączone nieprawidłowo, strumień magnetyczny
zmniejszałby się silnie ze wzrostem obciążenia i charakterystyka obciążenia byłaby silnie
opadająca (rys. 8.50).
str.6 Temat: Silniki prądu stałego i ich właściwości ruchowe.
1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki:
a) samowzbudne
bocznikowe;
szeregowe;
szeregowo-bocznikowe
b) obcowzbudne
2. Pracę silnika prądu stałego charakteryzują następujące wielkości:
U
M
I
n
- napięcie zasilania;
- moment obciążenia;
- prąd obciążenia (zależny od momentu obciążenia);
- prędkość obrotowa.
Właściwości ruchowe silników wszystkich typów można określić na podstawie następujących
zależności:
Φ
Φ
Z ostatniego równania można wyznaczyć prędkość obrotową:
Φ
przy czym cM i cE – stałe zależne od parametrów silnika.
3. Najistotniejsze właściwości ruchowe silników przedstawia się w sposób wykreślny za
pomocą charakterystyk:
n=f(I) lub n=f(M) przy U=cont i Rf=const zwanych charakterystykami mechanicznymi silnika
prądu stałego
M=f(I) przy U=const i Rf=const zwanej charakterystyką momentu silnika prądu stałego.
4. Silnik bocznikowy.
W silniku bocznikowym uzwojenie wzbudzające jest połączone równolegle z uzwojeniem
twornika i zasilane napięciem sieci U (rys. 8.52).
Charakterystyki mechaniczne silnika bocznikowego wyznacza się przy U=const i Rf=const
(prąd wzbudzenia jest stały). Jeżeli pominie się wpływ oddziaływania twornika, to:
Φ
str.1 Φ
Jak wynika z powyższego wzoru charakterystyka n=f(I) przy U=const i Rf=const ma
w przybliżeniu przebieg prostoliniowy (rys. 8.53).
Zmiana prędkości obrotowej przy przejściu od biegu jałowego n0 do obciążenia
znamionowego nN nazywa się zmiennością prędkości:
Zmienność prędkości silnika bocznikowego wynosi 3÷8%, a z uwzględnieniem oddziaływania
twornika 2÷5%.
Charakterystyki o tak małej zmienności prędkości zalicza się do charakterystyk sztywnych
i nazywa się charakterystykami bocznikowymi.
5. Silnik szeregowy.
W silniku szeregowym uzwojenie wzbudzające jest połączone szeregowo z uzwojeniem
twornika (wirnika) i uzwojeniem biegunów komutacyjnych (rys. 8.58).
Prąd pobierany z sieci jest jednocześnie prądem twornika i prądem wzbudzenia I=Ia=If.
str.2 Właściwości ruchowe silników szeregowych w zasadniczy sposób różnią się od właściwości
ruchowych silników bocznikowych.
Strumień zależy od prądu obciążenia; wzrostowi momentu obciążenia odpowiada wzrost
prądu obciążenia i wzrost strumienia zgodnie z charakterystyką magnesowania obwodu
magnetycznego maszyny.
Charakterystyki silnika szeregowego.
Jeżeli założymy liniową zależność strumienia od prądu, to prędkość obrotową można
określić wzorem:
Na rys. 8.60. przedstawiono charakterystykę mechaniczną silnika szeregowego.
Bardzo duża prędkość obrotowa przy małych obciążeniach może doprowadzić do
uszkodzenia silnika ze względu na przekroczenie jego wytrzymałości mechanicznej.
str.3 Silnik szeregowy nie może pracować w stanie jałowym i musi być połączony z maszyną
roboczą za pomocą sprzęgła lub przekładni zębatej (nie wolno stosować pasa klinowego).
Wadą silnika szeregowego jest możliwość rozbiegania się, natomiast jego zaletą jest duży
moment rozwijany podczas rozruchu Mr=cI2r.
Moment rozwijany podczas rozruchu jest wprost proporcjonalny do kwadratu prądu
rozruchowego.
Silniki te są stosowane do napędu urządzeń ruszających pod dużym obciążeniem.
Porównanie momentów i prądów rozruchowych silnika szeregowego i bocznikowego
umożliwia rys. 8.61.
6. Silnik szeregowo-bocznikowy.
Silnik szeregowo-bocznikowy ma dwa uzwojenia wzbudzające: bocznikowe i szeregowe
(rys. 8.62.).
Silnik taki ma właściwości zbliżone do silnika bocznikowego lub szeregowego w zależności
od udziału przepływów bocznikowego i szeregowego.
str.4 W praktyce stosuje się zgodne połączenie uzwojeń, tzn. takie że strumienie wytworzone
przez uzwojenie szeregowe i bocznikowe dodają się, przy czym przepływ bocznikowy
odgrywa dominującą rolę.
Przy niezgodnym dozwojeniu otrzymalibyśmy
zapewniającą stabilnej pracy (rys. 8.63a).
charakterystykę
mechaniczną
nie
Porównując charakterystykę mechaniczną silnika szeregowego
z charakterystyką
mechaniczną silnika dozwojonego zgodnie (rys. 8.63b), można stwierdzić że silnik
szeregowo-bcznikowy nie ma ujemnej cechy rozbiegania się w stanie jałowym, jaką miał
silnik szeregowy. W porównaniu z silnikiem bocznikowym ma tę zaletę, że wykazuje duży
moment rozruchowy.
str.5 Temat: Rozruch i regulacja prędkości obrotowej silników prądu stałego.
1. Rozruch silników prądu stałego.
W chwili rozruchu prędkość silnika jest równa zeru, więc siła elektromotoryczna indukowana
E ma wartość zero i równanie napięć dla silnika przyjmuje postać:
Napięcie doprowadzone do silnika w chwili rozruchu jest równoważone przez spadek
napięcia na rezystancji twornika, a więc prąd rozruchowy pobierany przez silnik
jest bardzo duży w porównaniu z prądem pobieranym w czasie pracy
Prąd rozruchowy jest wielokrotnie większy od prądu znamionowego. Prąd rozruchowy
można ograniczyć przez zmniejszenie napięcia zasilającego lub włączenie w obwód twornika
dodatkowego opornika o rezystancji Rar zwanego rozrusznikiem, wówczas:
W silnikach bocznikowych należy pamiętać, aby obwód wzbudzenia w czasie rozruchu był
włączony za rozrusznikiem, ale tak aby był zasilany pełnym napięciem sieci.
Rozrusznik jest zwykle opornikiem kilkustopniowym dostosowanym do pracy krótkotrwałej.
Przy załączeniu silnika bocznikowego z dodatkowym opornikiem zmniejsza się prąd, a także
moment silnika. Aby moment zmieniał się w określonych granicach, podczas rozruchu
wyłącza się kolejne sekcje rozrusznika przechodząc tym samym na kolejne charakterystyki,
aż – po całkowitym zwarciu rozrusznika – osiągnie się punkt pracy na charakterystyce
naturalnej.
Schemat połączeń silnika bocznikowego z rozrusznikiem pokazano na rys. 8.64, a przebieg
rozruchu tego silnika na rys. 8.65.
str.1 Rozruch silnika szeregowego przebiega podobnie, lecz należy pamiętać, że nie może się on
odbywać bez obciążenia, ponieważ silniki szeregowe rozwijają w chwili rozruchu bardzo
duży moment rozruchowy i mogą się rozbiegać.
W silnikach szeregowo-bocznikowych korzystny wpływ na właściwości rozruchowe ma
dozwojenie. Powoduje ono zwiększenie momentu rozruchowego, poza tym rozruch
przeprowadza się w podobny sposób.
Do ograniczania prądu rozruchowego w silniku obcowzbudnym stosuje się takie same
rozruszniki, jak w pozostałych typach silników.
2. Regulacja prędkości obrotowej.
Wzór na prędkość silnika prądu stałego z dodatkową rezystancją w obwodzie twornika Rar:
Φ
Z powyższej zależności wynika, że na zmianę prędkości wirowania wirnika mają wpływ:
napięcie U, rezystancja Rar oraz strumień Φ.
Oznacza to, że prędkość obrotową można regulować:
przez zmianę napięcia zasilania twornika U,
przez zmianę rezystancji w obwodzie twornika Rar,
przez zmianę strumienia Φ
Wszystkie te możliwości są wykorzystywane w praktyce, a różnią się one pod względem:
zakresu regulacji
kierunku regulacji (góra, dół)
ekonomicznym
a) regulacja szeregowa
Regulacja szeregowa polega na włączeniu rezystancji regulacyjnej Rar w szereg z obwodem
twornika. Sposób ten stosuje się zarówno w silnikach bocznikowych jak i szeregowych.
str.2 Włączając dodatkową rezystancję w obwód twornika możemy regulować prędkość obrotową
w dół, a więc poniżej prędkości odpowiadającej pracy na charakterystyce naturalnej
(rys. 8.66). Zakres regulacji zawiera się od prędkości znamionowej do zera.
Regulacja szeregowa jest nieekonomiczna.
b) regulacja bocznikowa
Regulacja bocznikowa sprowadza się do osłabienia strumienia.
W silnikach bocznikowych i obcowzbudnych rezystancję regulacyjną Rfr włączamy w szereg
z obwodem wzbudzenia, a w silniku szeregowym bocznikujemy obwód wzbudzenia.
Włączenie dodatkowej rezystancji w obwód wzbudzenia powoduje zmniejszenie strumienia
i przy określonym prądzie powoduje wzrost prędkości. Zwiększa się przy tym prędkość
biegu jałowego n0 oraz nachylenie charakterystyki mechanicznej (rys. 8.67).
Regulacja bocznikowa jest regulacją w górę od wartości nN do ok. 3nN, a przy tym jest
regulacją ekonomiczną.
Prowadząc regulację prędkości przez zmianę strumienia należy mieć świadomość, jakie
skutki może wywołać nadmierne osłabienie pola lub zanik prądu w obwodzie wzbudzenia
silnika.
str.3 Jeżeli przy biegu jałowym strumień zmaleje do wartości strumienia szczątkowego, a silnik nie
zatrzyma się, to prędkość obrotowa wielokrotnie wzrośnie. Z tego względu obwód
wzbudzenia silnika bocznikowego i obcowzbudnego nie wolno rozwierać (w silniku
szeregowym nie wolno zwierać obwodu wzbudzenia). Regulator wzbudzenia powinien być
tak wykonany, aby jego rozwarcie było niemożliwe.
c) regulacja przez zmianę napięcia zasilania
Regulacja prędkości obrotowej przez zmianę napięcia twornika można uzyskać przez
zastosowanie tyrystorowych regulatorów napięcia.
Zmieniając napięcie zasilające twornik, można przy znamionowym obciążeniu regulować
prędkość od zera do wartości większej od prędkości znamionowej (rys. 8.68).
W całym zakresie regulacji prąd twornika nie ulega zmianie i zależy tylko od obciążenia.
Przy regulacji prędkości przez zmianę napięcia twornika charakterystyka regulacyjna jest
liniowa.
Jest to metoda wygodna i praktycznie bez strat.
str.4 Temat: Maszyny specjalne prądu stałego – ich właściwości ruchowe i zastosowanie.
1. Do maszyn specjalnych można zakwalifikować:
a) wzbudnice maszyn synchronicznych – o szczególnym ukształtowaniu obwodu
magnetycznego
b) silniki trakcyjne – dostosowane do podwieszania pod pojazdem
c) prądnice do oświetlania wagonów, prądnice unipolarne – prądnice spawalnicze
d) maszyny wysokonapięciowe (do 30 kV) – o odmiennym układzie izolacyjnym
e) maszyny z magnesami trwałymi
f) małe maszyny stosowane w układach automatycznego sterowania i regulacji – tzw.
silniki wykonawcze oraz prądnice tachometryczne
g) wzmacniacze elektromaszynowe
2. Prądnica unipolarna.
Prądnica unipolarna (homopolarna) jest maszyną prądu stałego bez komutatora.
ZASADA DZIAŁANIA
Elementy uzwojenia twornika, w których indukują się napięcia, poruszają się w polu o takiej
samej biegunowości. Cewki magnesów wzbudzenia są wykonane w formie pierścieni
(rys. 8.69) i umieszczone na wewnętrznym obwodzie stojana.
Prąd płynący w uzwojeniu wzbudzającym wytwarza strumień magnetyczny, który zamyka się
w obwodzie jak na rysunku. Pierścień magnetyczny w stojanie tworzy biegun N, a twornik
biegun S. Gdyby w tworniku zostały umieszczone pręty uzwojenia, w każdym z nich
indukowałaby się siła elektromotoryczna E=Blv o takim samym kierunku w każdym pręcie.
W tej sytuacji szczotka A1, przy kierunku wirowania zaznaczonym na rysunku, ma zawsze
biegunowość dodatnią.
Prądnice unipolarne umożliwiają uzyskanie prądu o wartości dziesiątek kiloamperów przy
bardzo niskim napięciu (20-30 V). Z tego względu znalazły one zastosowanie jako źródła
niskiego napięcia, a jednocześnie dużego prądu do zasilania urządzeń elektrolizy.
3. Prądnica tachometryczna.
Prądnice tachometryczne prądu stałego są to maszyny małej mocy z magnesami trwałymi
lub obcowzbudne. Konstrukcja ich jest podobna do konstrukcji dużych maszyn prądu
stałego, powinna jednak zapewniać zmniejszenie pulsacji napięcia spowodowanej istnieniem
żłobków i komutatora. Prądnice te mają moce 10-50 W i służą w układach regulacji jako
przetworniki prędkości kątowej na sygnał elektryczny – napięcie.
str.1 Prądnice tachometryczne z magnesami trwałymi są mało czułe na zmiany temperatury,
wrażliwe na wstrząsy, ich magnesy trwałe podlegają procesowi starzenia, a ponadto nie ma
możliwości regulacji nachylenia charakterystyki.
W celu zmniejszenia pulsacji napięcia stosuje się często konstrukcje bezżłobkowe prądnic
tachometrycznych, o odpowiednio dużej liczbie wycinków komutatora.
4. Maszyny wzbudzane magnesami trwałymi.
W maszynach prądu stałego małej mocy, do ok. 100 W, do wytworzenia głównego pola
magnetycznego powszechnie są stosowane magnesy trwałe. Typowym przykładem takiego
rozwiązania są silniki prądu stałego zasilane z baterii: silniki do zabawek, silniki napędzające
wycieraczki szyb samochodowych, silniki magnetofonów kasetowych i inne.
Najczęściej stosowane w tych silnikach materiały magnetyczne to materiały proszkowe
z ferrytów baru lub magnesy lane ze stopów alnico.
Najprostsze rozwiązanie konstrukcyjne takiego silnika przedstawiono na rys. 8.70.
Silnik taki można traktować jak silnik z trzema żłobkami oraz trzema wycinkami komutatora.
Zęby takiego wirnika są jednocześnie biegunami. Bieguny wzbudzenia (w stojanie) są
rozmieszczone symetrycznie – kat między ich osiami wynosi 180o. Bieguny twornika
(wirnika) natomiast są rozmieszczone niesymetrycznie – kąt między nimi wynosi 120o, ale w
każdej chwili tylko dwa uzwojenia są zasilane.
Podczas obrotu wirnika szczotka A2 poprzez komutator wyłącza zasilanie uzwojenia 2,
włącza w obwód uzwojenie 3. Po obrocie wirnika o 60o szczotka A1 zachowuje się podobnie,
wyłącza prąd w uzwojeniu 1, a włącza w obwód uzwojenie 2. W ten sposób, przez cykliczne
przełączanie uzwojeń, każdy z biegunów wirnika znajdujący się na dole ma biegunowość N,
a na górze biegunowość S, co powoduje, że moment obrotowy wirnika ma zawsze ten sam
kierunek. Zmianę kierunku wirowania uzyskuje się przez zmianę biegunowości szczotek A1
i A2.
5. Silniki z wirnikiem drukowanym.
Wśród licznych rozwiązań konstrukcyjnych silników prądu stałego ze względu na właściwości
na szczególną uwagę zasługuje silnik tarczowy.
Jak widać na rys. 8.71 silnik tarczowy składa się z dwóch płyt (talerzy) krańcowych, do
których są przymocowane magnesy trwałe (wzbudzenie magnetoelektryczne) lub
elektromagnesy (wzbudzenie elektromagnetyczne).
str.2 Po zmontowaniu między magnesami pozostaje płaska szczelina powietrzna, w której obraca
się płaski wirnik (rys. 8.72).
Magnesy są najczęściej odlane ze stopów zapewniających stabilny strumień w szczelinie lub
z ferrytów, które jednak wytwarzają pole o mniejszym natężeniu.
Silniki tarczowe mają następujące zalety:
bardzo mały moment bezwładności wirnika (ok. 25 razy mniejszy niż w silnikach
tradycyjnych), małe mechaniczne stałe czasowe wynoszące 3÷10 ms (w silnikach
tradycyjnych 4÷150 ms),
znacznie korzystniejszy przebieg komutacji niż w silniku tradycyjnym,
prostoliniową charakterystykę mechaniczną,
stały moment w całym zakresie prędkości (od 0 do prędkości znamionowej),
duży zakres regulacji prędkości obrotowej 1÷3000 obr/min,
możliwość uzyskania idealnie liniowej zależności siły elektromotorycznej od
prędkości,
moment impulsowy 4÷9 razy większy niż znamionowy,
małe wymiary całkowite i mały ciężar w porównaniu z silnikami tradycyjnymi.
Wady silników tarczowych to:
str.3 duży koszt wytwarzania,
mniejsza trwałość niż silników konwencjonalnych, zwłaszcza przy większych mocach.
Wymienione cechy silników tarczowych zadecydowały, że są one stosowane jako silniki
wykonawcze w układach sterowania i automatyki, a szczególnie do sterowania obrabiarek
(frezarek, szlifierek i tokarek), do napędu pamięci w maszynach cyfrowych, w zgrzewarkach,
pojazdach mechanicznych i urządzeniach radiolokacyjnych.
Silniki tarczowe są wykonywane o mocach od kilkunastu watów do ok. 10 kW. Wartość
graniczna mocy wzrasta wraz z poprawą jakości stosowanych materiałów, które często są
drogie i niekiedy trudno dostępne.
Silniki tarczowe są zaliczane do grupy silników z drukowanym uzwojeniem wirnika. Oprócz
silników tarczowych stosuje się także inne konstrukcje wirników z uzwojeniami drukowanymi,
są to:
wirniki kubkowe z uzwojeniami drukowanymi,
wirniki kokonowe
Silniki z takimi wirnikami mają jeszcze mniejszy moment bezwładności i są zaliczane do
małoinercyjnych i szybkodziałających.
6. Silniki wykonawcze.
Silniki wykonawcze prądu stałego są to silniki stosowane w układach automatycznego
sterowania i regulacji, a zadaniem ich jest przekształcenie sygnału elektrycznego (napięcia
sterującego) na przemieszczenie mechaniczne (prędkość obrotową lub położenie kątowe).
Silniki wykonawcze prądu stałego są to silniki małej mocy bez biegunów pomocniczych, przy
czym uzwojenie biegunów i obwód wirnika są zasilane z oddzielnych źródeł.
Jeden obwód nazywamy obwodem wzbudzenia i jest on zasilany z sieci ostałym napięciu Uf,
drugi nazywamy obwodem sterowania i jest on zasilany tylko wówczas, gdy silnik ma
wykonać konkretne zadanie.
Wymagania, które musi spełnić silnik wykonawczy to:
liniowość charakterystyk mechanicznych,
stabilność charakterystyk mechanicznych,
samohamowność,
małe wymiary,
szybka odpowiedź
Do silników wykonawczych prądu stałego zalicza się silniki:
a) obcowzbudne
Silniki wykonawcze prądu stałego są zbudowane podobnie do normalnych obcowzbudnych
maszyn prądu stałego. Często zamiast elektromagnesów stosuje się w nich wzbudzenie
magnesami trwałymi. Zasadniczą cechą tych silników jest precyzja wykonania, zapewniająca
uzyskanie małych błędów. Silniki wykonawcze prądu stałego są najczęściej
dwubiegunowymi maszynami małej mocy (5÷10 W), a ich sprawność wynosi 25÷30 %.
Regulować prędkość obrotową silnika prądu stałego, czyli sterować silnikiem prądu stałego,
można dwoma sposobami.
Pierwszy sposób polega na regulacji strumienia magnetycznego, drugi na regulacji siły
elektromotorycznej przez zmianę napięcia na zaciskach twornika.
str.4 Najczęściej silnikami wykonawczymi steruje się przez zmianę napięcia twornika
(tzw. sterowanie napięciem twornika), mimo że sterowanie przez zmianę prądu wzbudzenia
(tzw. sterowanie napięciem magnesów) jest tańsze i wymaga mniejszej mocy sterującej.
Sterowanie napięciem twornika odbywa się przy stałym strumieniu magnesów, natomiast
sterowanie przez zmianę strumienia przy stałej wartości napięcia twornika.
Sterowanie napięciem wzbudzenia może być realizowane tylko w silnikach o wzbudzeniu
elektromagnetycznym. Sterowanie to nie znajduje jednak szerszego zastosowania ze
względu na nieliniowość charakterystyki regulacyjnej oraz dużą elektromagnetyczną stałą
czasową uzwojenia wzbudzającego, mimo istotnej zalety jaką jest mała moc źródła
sterującego.
b) krokowe (skokowe)
Silniki krokowe są elementami wykonawczymi przetwarzającymi impulsy elektryczne na
przesunięcia kątowe lub liniowe, nazywane krokami lub skokami.
Najprostszą konstrukcję silnika krokowego przedstawiono na rys. 8.74.
Uzwojenie stojana jest zasilane impulsowo prądem stałym. W stojanie znajduje się dużo
biegunów magnetycznych i aby uzyskać dużą liczbę skoków mogą być zasilane kolejno
uzwojenia poszczególnych biegunów lub odpowiednich biegunów połączonych w układy.
Aby osiągnąć określoną częstotliwość skoków, impulsy zasilające muszą się zmieniać
w czasie. Koszt silnika i układu sterującego jest tym większy, im większa jest częstotliwość
impulsów i mniejsze skoki. W celu uzyskania małych skoków buduje się tzw. silniki
wielostojanowe, w których w jednej osi maszyny znajduje się kilka rzędów układów
biegunów, przy czym osie tych biegunów są przesunięte w przestrzeni.
Silniki krokowe w porównaniu z innymi silnikami wykonawczymi wykazują cenne zalety,
między innymi:
wpływają na zmniejszenie liczby elementów i uproszczenia systemu sterowania,
charakteryzują się dużą dokładnością,
ograniczają lub eliminują całkowicie sprzężenie zwrotne i układy prądnic
tachometrycznych.
7. Wzmacniacze elektromaszynowe.
str.5 Wzmacniaczami elektromaszynowymi nazywa się grupę specjalnych maszyn elektrycznych
prądu stałego, których zadaniem jest wzmocnienie elektrycznego sygnału, prądu napięcia
lub mocy elektrycznej.
Właściwości ruchowe wzmacniacza określa się podając jego charakterystyki statyczne
i dynamiczne:
a) Charakterystyki statyczne określają zależność przy ustalonych wartościach wielkości
wejściowych i wyjściowych. Podstawowe charakterystyki statyczne to:
charakterystyka sterowania będąca zależnością wielkości wyjściowej od wielkości
wejściowej przy stałej rezystancji obciążenia,
charakterystyka zewnętrzna będąca zależnością wielkości wyjściowej od obciążenia
przy stałej wartości wielkości wejściowej.
b) Charakterystyki dynamiczne określa się wyznaczając operatorową transmitancję
wzmacniacza, która informuje o przebiegach w stanach nieustalonych.
Wielkościami charakteryzującymi wzmacniacz są:
współczynnik wzmocnienia (mocy, napięcia lub prądu),
stała czasowa,
współczynnik dobroci określany jako iloraz współczynnika wzmocnienia i stałej
czasowej
PRĄDNICA OBCOWZBUDNA JAKO WZMACNIACZ
Zwykła prądnica obcowzbudna prądy stałego może być traktowana jako wzmacniacz prądu
lub mocy. Wejściem jest w niej obwód wzbudzenia, a wyjściem obwód obciążenia (rys. 8.75).
Współczynnik wzmocnienia mocy zależy od kwadratu prędkości obrotowej i kwadratu
permeancji (przewodności magnetycznej). W celu uzyskania dużego współczynnika
wzmocnienia mocy należałoby zbudować maszynę o dużej prędkości obrotowej z bardzo
małą szczeliną powietrzną.
Prądnica obcowzbudna może pracować jako wzmacniacz, ale ponieważ jej współczynnik
wzmocnienia jest mały (wynosi 20÷100) nie znajduje one praktycznego zastosowania.
Powiększenie współczynnika wzmocnienia można uzyskać stosując kaskadowe łączenie
dwóch lub więcej prądnic.
AMPLIDYNA
Amplidyna jest najbardziej rozpowszechnionym elektromaszynowym wzmacniaczem
dwustopniowym z polem poprzecznym. Obwód magnetyczny i schemat połączeń amplidyny
przedstawiono na rys. 8.76.
str.6 Amplidyna jest maszyną prądu stałego, w której przepływ oddziaływania twornika
wykorzystano do dalszego wzbudzenia maszyny. Maszynę przedstawioną na rys. 8.76
należy traktować jako dwubiegunową o rozdzielonych biegunach.
Amplidyny znalazły szerokie zastosowanie w elektromaszynowych układach regulacji, jako
wzbudnice prądnic sterujących układu Leonarda (układ regulacji prędkości obrotowej
silników prądu stałego największych mocy).
str.7