Pole magnetyczne
Indukcja magnetyczna i strumień
magnetyczny
Przepływ prądu elektrycznego przez przewodnik
powoduje powstanie wokół przewodnika pola
magnetycznego. Obecność tego pola można
wykryć umieszczając w pobliżu przewodnika igłę
magnetyczną. Na bieguny igły magnetycznej
będzie działała wówczas siła mechaniczna,
powodująca ustawienie się igły wzdłuż linii,
zwanych liniami sił pola magnetycznego.
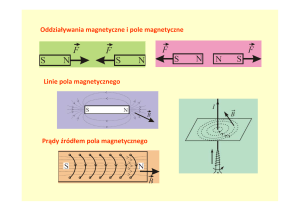
Linie sił pola magnetycznego
wokół przewodnika z prądem
Liniom sił przypisuje się kierunek, zgodny z
kierunkiem siły działającej na biegun północny
(N) igły. Wektor siły F jest styczny do linii sił.
Linie sił wokół prostego przewodnika z prądem
mają wygląd kół koncentrycznych, obejmujących
przewodnik. Ich kierunek jest zgodny z
kierunkiem obrotu śruby prawoskrętnej, wkręcanej
w kierunku zgodnym z kierunkiem przepływu
prądu. Na przekroju poprzecznym przewodnika
zaznacza się kierunek prądu krzyżykiem, gdy prąd
płynie za płaszczyznę rysunku, lub kropką, gdy
płynie on od płaszczyzny rysunku.
Dla zwiększenia gęstości linii sił wykonuje się
zwoje, które ułożone obok siebie tworzą
uzwojenie, które nazywamy cewką albo zwojnicą
Wszystkie linie sił przechodzące przez środek
zwoju lub zwojnicy tworzą strumień
magnetyczny. Wartość strumienia magnetycznego
zależy od natężenia prądu I płynącego przez
przewodnik i liczby zwojów „z” zwojnicy. Iloczyn
Iz nosi nazwę przepływu uzwojenia :
= I z
Jednostką przepływu jest amper, tak jak natężenia
prądu, gdyż z jest liczbą niemianowaną.
Wielkością fizyczną, charakteryzującą pole
magnetyczne, jest gęstość linii sił pola indukcja magnetyczną, oznaczana literą B.
Gdy gęstość linii sił pola jest jednakowa, to
pole takie nazywamy polem
równomiernym, o stałej indukcji B = const.
Wartość indukcji równomiernego pola
magnetycznego można wyznaczyć
doświadczalnie, umieszczając w tym polu
przewód z prądem, usytuowany
prostopadle do linii sił pola
Pole magnetyczne przewodu z prądem nałoży się na pierwotne
pole równomierne, powodując zagęszczenie linii sił pola (wzrost
indukcji) po jednej stronie przewodu, a rozrzedzenie
(zmniejszenie indukcji) – po drugiej stronie. Siła mechaniczna F
będzie działała na przewód w kierunku pola o zmniejszonej
indukcji, prostopadle do przewodu i do linii sił pola pierwotnego.
Reguła lewej ręki:
gdy lewą dłoń
ustawimy w polu
tak, aby linie sił
pola wchodziły do
dłoni, a palce
wskazywały
kierunek prądu,
wówczas
odchylony kciuk
wskaże kierunek
działania siły F
Wartość siły F jest określona wzorem:
F=BIl
gdzie:
F – siła w niutonach,
I – natężenie prądu w amperach,
l – długość przewodu w metrach.
Jednostką indukcji magnetycznej w układzie jednostek SI jest tesla (T):
[F ]
N
J
V A s
V s
[ B]
1
1
1
1 2 1T
2
2
[ I ][l ] A m
A m
A s
m
Wszystkie linie sił przechodzące przez
daną powierzchnię S prostopadłą do linii
sił tworzą strumień magnetyczny
Strumień magnetyczny jest
określony wzorem:
BdS
W przypadku równomiernego pola magnetycznego
B = const strumień magnetyczny jest iloczynem
indukcji magnetycznej przez powierzchnię
prostopadłą do linii sił pola:
=BS
Jednostką strumienia magnetycznego jest weber.
Określa się ją następująco:
V s 2
[] [ B][S ] 1 2 1m 1V s 1Wb
m
Obwód magnetyczny
Obwodem magnetycznym nazywa się zamkniętą
drogę, w której przebiega strumień magnetyczny.
Dla uzyskania dużej indukcji magnetycznej obwód
magnetyczny wykonuje się tak, aby linie sił
strumienia magnetycznego przebiegały w materiale
o dobrej przewodności dla strumienia
magnetycznego (dużej przenikalności
magnetycznej). Z materiału tego wykonuje się
rdzeń obwodu magnetycznego, zwany także
magnetowodem.
Rdzeń w kształcie pierścienia (toroidu), na którym
nawinięto uzwojenie o „z” zwojach
Jeżeli przez uzwojenie przepływa prąd o
natężeniu I amperów, jego przepływ wynosi:
=Iz
W rdzeniu powstaje strumień magnetyczny o długości linii sił l,
która równa się długości osi pierścienia. Przepływ przypadający na
jednostkę długości linii sił nosi nazwę natężenia pola
magnetycznego i jest oznaczony literą H:
Iz
H
l
l
Jednostką natężenia pola magnetycznego
jest A/m. Dla danego przepływu natężenie
pola magnetycznego jest tym większe, im
krótszy jest obwód magnetyczny.
Gęstość linii sił pola magnetycznego w
rdzeniu jest w przybliżeniu jednakowa,
tzn. pole jest równomierne, o stałej
indukcji:
B
S
Zależność między indukcją magnetyczną
B a natężeniem pola magnetycznego H jest
określona wzorem:
B H
gdzie - jest to współczynnik proporcjonalności,
zwany przenikalnością magnetyczną.
Współczynnik ten jest liczba mianowaną. Wymiar
przenikalności magnetycznej:
[ B]
V s
A
Vs
s
H
[ ]
1 2 1 1
1
1
[H ]
m
Am
m
m
m
gdzie 1 H – jednostka zwana henrem
Przenikalność magnetyczna jest
iloczynem dwóch wielkości
= 0r
0 – jest to przenikalność magnetyczna próżni;
jej wartość wynosi 0 = 410-7 H/m
r – jest to przenikalność magnetyczna
względna, która jest stosunkiem przenikalności
magnetycznej danego ciała do przenikalności
magnetycznej próżni.
Pod względem magnetycznym wszystkie
ciała występujące w przyrodzie, dzielimy
na ciała:
diamagnetyczne, dla których r < 1,
paramagnetyczne, dla których r >1,
ferromagnetyczne, dla których r >> 1.
Przenikalność magnetyczna względna ciał dia- i
paramagnetycznych niewiele różni się od jedności, np.
dla diamagnetycznej miedzi wynosi ona r = 0,999991,
a dla paramagnetycznego aluminium r = 1,000021.
Przenikalność magnetyczna względna ciał
ferromagnetycznych, do których należy
żelazo, kobalt, nikiel i ich stopy, jest
bardzo duża, rzędu setek i tysięcy. Przy
danym natężeniu pola magnetycznego H
indukcja B w rdzeniu ferromagnetycznym
jest więc wielokrotnie większa, niż w
powietrzu, dla którego r 1. Z tego
względu magnetowody obwodów
magnetycznych wykonuje się zazwyczaj z
ciał ferromagnetycznych.
Dla ciał dia- i paramagnetycznych przenikalność
magnetyczna jest stała i w przybliżeniu równa
przenikalności magnetycznej próżni 0 = const,
zatem zależność B =f(H) , określona zależnością
B = H jest dla tych ciał liniowa
Dla ciał ferromagnetycznych zależność
B = f(H) jest nieliniowa, a wykres
przedstawiający tę zależność jest linią
krzywą, zwaną krzywą magnesowania. Przy
zwiększaniu natężenia pola H indukcja B
początkowo silnie rośnie i krzywa przebiega
bardzo stromo. Począwszy jednak od pewnej
wartości H następuje zagięcie
krzywej magnesowania (zwane kolanem
krzywej) i przy dalszym zwiększaniu H
przyrost B jest stosunkowo nieznaczny.
Zjawisko to nosi nazwę nasycenia
magnetycznego.
Wskutek nieliniowej zależności B = f(H)
przenikalność magnetyczna ciał
ferromagnetycznych nie jest stała,
const. Dla każdego punktu krzywej
magnesowania wartość jej można znaleźć
dzieląc indukcję w tym punkcie przez
natężenie pola:
B
H
Zależność =f(H) ciał
ferromagnetycznych
Punkt wartości maksymalnej przenikalności
magnetycznej leży tuż przed kolanem krzywej
magnesowania. Obwody magnetyczne projektuje
się zazwyczaj w ten sposób, aby pracowały one
przy takich wartościach indukcji, dla których
przenikalność magnetyczna jest zbliżona do
maksymalnej.
Z budową ciał ferromagnetycznych wiąże się
również zjawisko histerezy magnetycznej, które
polega na tym, że tym samym wartościom pola
magnetycznego H odpowiadają różne wartości
indukcji magnetycznej w zależności od
poprzednich stanów namagnesowania.
Jeżeli przez uzwojenie
magnesujące będzie
przepływał prąd
przemienny, o okresowo
zmiennym w czasie
kierunku i natężeniu,
wówczas materiał rdzenia
będzie
przemagnesowywany
cyklicznie. Indukcja B w
zależności od natężenia
pola H będzie się
zmieniała według
zamkniętego obiegu – pętli
histerezy magnetycznej
Zasadniczy podział materiałów
ferromagnetycznych jest to podział na materiały
magnetycznie a)miękkie i b) twarde
[c) prostokątna pętla histerezy]
Materiały magnetycznie miękkie mają wąską pętlę
histerezy o małych wartościach Bsz i Hk. Po
wyłączeniu prądu w uzwojeniu magnesującym wracają
one łatwo do stanu nienamagnesowania.
Materiały magnetycznie twarde odznaczają się szeroką
pętlą histerezy. Indukcja szczątkowa tych materiałów
jest bardzo duża, zbliżona do wartości maksymalnej, a
do ich rozmagnesowania potrzebne jest duże natężenie
pola koercji Hk. Do materiałów tych należą stale
węglowe hartowane oraz stopy magnetyczne,
zawierające nikiel i kobalt niekiedy z domieszką
aluminium (np. stop alnico). Służą one do wyrobu
trwałych magnesów.
Z kształtem pętli histerezy związane jest
nagrzewanie się rdzeni ferromagnetycznych przy
przemagnesowywaniu cyklicznym. Przy zmianie
kierunku prądu w uzwojeniu magnesującym
elementarne magnesy w rdzeniu muszą obrócić się o
kąt 180. Wymaga to pokonania tarcia
międzycząsteczkowego, a zatem doprowadzenia
pewnej energii, która wskutek tarcia zamienia się na
energię cieplną, powodując zbędny a nawet
szkodliwy wzrost temperatury rdzenia, jest więc
energią traconą bezużytecznie. Energia tracona w
jednostce czasu stanowi moc strat na histerezę Ph.
Gdy prąd magnesujący jest prądem zmiennym
okresowo (przemiennym) o częstotliwości f moc
strat na histerezę wyraża się wzorem
Ph = kh Bm2 f
Są one proporcjonalne do kwadratu wartości maksymalnej indukcji Bm
i do częstotliwości f. Występujący w tym wzorze współczynnik kh jest
zależny od szerokości pętli histerezy. Można udowodnić, że straty na
histerezę są proporcjonalne do powierzchni wykresu objętej pętlą
histerezy. Dla materiałów magnetycznie miękkich pętla histerezy jest
wąska, a więc straty na histerezę są małe. Z tego względu z
materiałów tych wykonuje się rdzenie magnetyczne, które podlegają
cyklicznemu przemagnesowywaniu (wirniki maszyn elektrycznych,
transformatory). Są to przeważnie blachy magnetyczne, np. blacha
twornikowa, blacha transformatorowa itp.
Obliczanie obwodów magnetycznych
Dla rdzenia o kształcie ramki o przekroju
poprzecznym S i długości linii sił pola
magnetycznego l indukcja magnetyczna B wynosi
Iz
B H
l
l
Przy założeniu równomiernego
rozkładu indukcji, strumień = BS
Iz
Iz
S
l
l
S
gdzie
mianownik:
l
R
S
nosi nazwę oporu
magnetycznego - reluktancji.
Prawo Ohma dla obwodu magnetycznego
R
Strumień jest proporcjonalny do przepływu i odwrotnie
proporcjonalny do reluktancji R, podobnie jak w obwodzie
elektrycznym prąd I jest proporcjonalny do siły elektromotorycznej
(SEM) i odwrotnie proporcjonalny do rezystancji R obwodu. Przez
analogię przepływ = I z nazywa się siłą magnetomotoryczną
(SMM).Wymiar oporu magnetycznego:
[]
A
1
1
[ R ]
1 1
1
[ ]
Vs
s
H
Należy zwrócić uwagę, że dla materiałów
ferromagnetycznych const, opór
magnetyczny jest więc oporem nieliniowym
Opory magnetyczne są elementami
pasywnymi obwodu magnetycznego.
Obwody magnetyczne mogą składać się z
pewnej liczby oporów magnetycznych w
połączeniu szeregowym, równoległym lub
mieszanym
Połączenie szeregowe oporów
magnetycznych
Opory magnetyczne (reluktancje) poszczególnych części obwodu
wyrażają się wzorami:
R 1
l1
l2
; R 2
;...
1 S1
2 S2
a opór zastępczy (wypadkowy) całego obwodu jest równy sumie
oporów składowych:
R = R1 + R2 + R3 + ...= R
Strumień magnetyczny równa się przepływowi
podzielonemu przez opór magnetyczny całego obwodu:
R1 R 2 ... R
Obwód magnetyczny rozgałęziony
W miejscach
rozgałęzienia obwodu
obowiązuje, podobnie
jak dla obwodu
elektrycznego, pierwsze
prawo Kirchhoffa,
według którego
algebraiczna suma
strumieni w miejscu
rozgałęzienia obwodu
równa się zeru. Dla tego
obwodu więc:
1 2
Ogólnie
0
Uzwojenia, będące źródłami siły magnetomotorycznej, są
elementami aktywnymi obwodu magnetycznego. Siły
magnetomotoryczne działające w danym obwodzie
magnetycznym dodają się algebraicznie. Przyjmując kierunek
w prawo za dodatni otrzymamy:
1 2 3 I1 z1 I 2 z 2 I 3 z3
Dla każdego zamkniętego obwodu
magnetycznego (oczka) obowiązuje drugie
prawo Kirchhoffa
R
Analogicznie do drugiego prawa Kirchhoffa dla
obwodów elektrycznych można powiedzieć, że: w
każdym zamkniętym obwodzie magnetycznym
algebraiczna suma sił magnetomotorycznych równa
się algebraicznej sumie spadków napięcia
magnetycznego.
Praktyczne stosownie tego wzoru natrafia
na trudności z powodu nieliniowości
reluktancji. Dla uniknięcia tych trudności
przekształca się ten wzór następująco:
l1
l2
R R1 R 2 ...
...
1S1
2 S2
B1
1
l1
B2
2
l2 ... H1l1 H 2l2 ... Hl
Ostatecznie otrzymujemy prawo przepływu
Hl
Sumaryczny przepływ uzwojeń
wytwarzających siłę magnetomotoryczną w
obwodzie magnetycznym równa się sumie
iloczynów natężenia pola magnetycznego
przez długość linii sił wzdłuż całej drogi
obwodu magnetycznego.
Obwód magnetyczny, w którym strumień magnetyczny
przechodzi przez szczelinę powietrzną o długości lp i przekroju Sp
Dla indukcji w szczelinie powietrznej Bp natężenia pola magnetycznego
Hp oblicza się przy założeniu, że przenikalność magnetyczna powietrza
jest równa w przybliżeniu przenikalności magnetycznej próżni 0
Hp
Bp
0
Bp
4 10
0,8 10 B p
6
7
Przepływ potrzebny do pokonania szczeliny
powietrznej wynosi
p H pl p
Wskutek małej przenikalności magnetycznej
powietrza wartości p wypadają bardzo duże. Z tego
względu obwody magnetyczne konstruuje się tak,
aby droga strumienia w powietrzu była jak
najkrótsza.
Siły elektrodynamiczne.
Siłami elektrodynamicznymi nazywa się siły
działające na przewody, którymi płynie prąd
elektryczny. Naokoło każdego przewodu z
prądem istnieje pole magnetyczne. Jeżeli dwa
przewody z prądem ułożone są równolegle w
pobliżu siebie, to na każdy z nich
oddziaływuje siła, której kierunek można
określić stosując regułę lewej ręki
I1 I 2l
F 0
2a
F- siła w niutonach, I1 I2 – prądy w
amperach, l - długość przewodów w
metrach, a – odległość między
przewodami w metrach
Definicja ampera:
Amper jest natężeniem prądu
elektrycznego, który przepływając w
dwóch przewodach równoległych
prostolinijnych o długości
nieskończonej i o przekroju okrągłym
znikomo małym, umieszczonych w
próżni w odległości 1 m od siebie,
wytwarza między tymi przewodami siłę
równą 2*10-7 niutonów na 1 metr
długości przewodu
Zjawisko występowania sił elektrodynamicznych zostało
przyjęte za podstawę działania dokładnych przyrządów
pomiarowych, zwanych przyrządami elektrodynamicznymi.
Siły elektrodynamiczne mogą niekiedy osiągać bardzo duże
wartości, szczególnie przy zwarciach, gdy natężenia prądów
są bardzo duże i przewyższają wielokrotnie prądy płynące
przy normalnej pracy. Znane są przypadki rozrywania i
przesuwania słabo umocowanych uzwojeń transformatorów
pod wpływem sił zwarciowych. Przy zwarciach w
rozdzielniach siły elektrodynamiczne mogą powodować
łamanie izolatorów, do których przymocowane są szyny
zbiorcze. Powodują one również przesuwanie się łuku
występującego przy zwarciu między przewodami, który
„wędruje” po szynach w kierunku działania siły.
Zjawisko indukcji elektromagnetycznej
Zjawisko indukcji elektromagnetycznej, odkryte
przez Faraday’a w 1831 roku, polega na
powstawaniu siły elektromotorycznej w
zamkniętym obwodzie, który obejmuje zmienny
strumień magnetyczny.
Wartość indukowanej siły elektromotorycznej jest
równa prędkości zmian strumienia magnetycznego
d
e
dt
Gdy strumień magnetyczny jest wyrażony w woltosekundach
Vs, wówczas prędkość zmian strumienia d/dt jest liczbowo
równa indukowanej sile elektromotorycznej w woltach (V).
Zmiana strumienia może występować pod wpływem ruchu
przewodu względem nieruchomego pola magnetycznego, lub
ruchu pola magnetycznego względem nieruchomego
przewodu.
Pierwszy przypadek zachodzi w maszynach elektrycznych
prądu stałego. W polu magnetycznym o stałej indukcji B
= const porusza się ze stałą prędkością v = const przewód
o długości l, umieszczony prostopadle do linii sił pola.
Kierunek indukowanej SEM można określić za
pomocą reguły prawej ręki; gdy prawą dłoń
ustawimy w polu tak, aby linie sił pola wchodziły
do dłoni, a odchylony kciuk wskazywał kierunek
ruchu przewodnika, wówczas pozostałe palce
wskażą kierunek indukowanej siły
elektromotorycznej.
Wartość SEM jest określona wzorem:
E = Blv
gdzie: B – indukcja w Vs/m2, l – długość przewodu w m, v –
prędkość ruchu przewodu w m/s
Poruszający się w polu przewód
elektryczny jest więc źródłem siły
elektromotorycznej. Jeżeli obwód
elektryczny, w skład którego wchodzi ten
przewód jest zamknięty, wówczas w
obwodzie tym popłynie prąd o natężeniu
określonym wzorem:
E
I
R
gdzie R – opór całego obwodu.
Jak wiadomo, na przewód z prądem w polu
magnetycznym działa siła F = BIl, której
kierunek określa reguła lewej ręki. Kierunek
działania tej siły jest przeciwny do kierunku
ruchu przewodu. Aby poruszać przewód
trzeba więc wykonywać pracę mechaniczną.
Elementarna praca wykonana przy
przesunięciu przewodu na odległość dl:
dW = Fdl
Praca wykonana w jednostce czasu jest mocą
mechaniczną określoną wzorem:
dW
dl
P
F Fv
dt
dt
Podstawiając za F = BIl otrzymujemy:
P = Fv = BIlv = EI
gdzie iloczyn EI jest mocą elektryczną prądu płynącego w obwodzie.
Przy pominięciu innych sił oprócz siły F (np. oporów tarcia) otrzymuje
się całkowitą zamianę energii mechanicznej na energię elektryczną.
Zjawisko to stanowi podstawę działania maszyn elektrycznych
wytwarzających prąd stały (prądnic prądu stałego)
Przy ruchu przewodu w kierunku wektora v na
rys (w prawo) strumień objęty pętlą utworzoną
przez obwód elektryczny ulega zmniejszeniu o
wartość ujemną -d, określonego wzorem:
-d = BdS = Bldl
Siłę elektromotoryczną E indukowaną w przewodzie
można więc wyrazić wzorem:
dl
d
E Blv Bl
dt
dt
który jest zgodny ze wzorem :
d
e
dt
Ponieważ według uczynionych założeń
v = const i B = const, a zatem d/dt = const,
indukowana siła elektromotoryczna ma więc
stałą wartość (dlatego duża litera E).
Gdyby przewód był przesuwany w przeciwnym
kierunku (w lewo), wówczas strumień objęty przez
obwód by wzrastał. Zgodnie z regułą prawej ręki
kierunek indukowanej SEM zmieniłby się na
przeciwny, który zgodnie ze wzorem
d
e
dt
dla d/dt>0 byłby
kierunkiem ujemnym.
Zależność między kierunkiem zmian
strumienia a kierunkiem indukowanej SEM
Prąd płynący w obwodzie pod wpływem
indukowanej SEM wzbudza strumień i
Gdy strumień maleje, wówczas prąd indukowany i wzbudza strumień
i o kierunku zgodnym z kierunkiem strumienia pierwotnego. Strumień
ten dodaje się do strumienia pierwotnego usiłując przeciwdziałać jego
zmniejszaniu się. Natomiast gdy strumień rośnie, wówczas strumień
i wzbudzony przez prąd i ma kierunek przeciwny do strumienia
pierwotnego i przeciwstawia się jego narastaniu.
Zjawisko to wyjaśnia prawo Lenza
Prąd indukowany w obwodzie wzbudza strumień
magnetyczny, który przeciwdziała zmianom
strumienia pierwotnego.
Prawo Lenza może posłużyć do wyznaczenia
kierunku indukowanego prądu.
Pojedynczy obwód dotychczas rozpatrywany można
traktować jako jeden ze zwojów cewki
wielozwojowej obejmującej rdzeń, przez który
przepływa zmienny w czasie strumień magnetyczny
Gdy liczba zwojów cewki
wynosi z, wtedy SEM
indukowana między
zaciskami uzwojenia jest z
razy większa niż SEM
jednego zwoju
d
e z
dt
Przebiegi czasowe strumienia magnetycznego mają
w wielu przypadkach charakter okresowo zmienny.
Przebiegi zmienności indukowanej SEM zależą od
charaktery zmienności strumienia.
Przy trójkątnym przebiegu funkcji = f(t) przebieg
zmienności e = f(t) ma kształt prostokątny. Gdy
strumień narasta liniowo, SEM zgodnie ze wzorem
d
e
dt
jest stała i ma wartość ujemną. Gdy strumień liniowo
maleje, SEM na wartość dodatnią.
Często w obwodach prądu przemiennego
strumień zmienia się sinusoidalnie. Indukowana
wtedy SEM zmienia się wówczas według sinusoidy
przesuniętej o kąt /2 względem sinusoidy
strumienia.
Prądy wirowe
Zjawisko indukcji elektromagnetycznej występuje w
każdym przewodniku, który znajduje się w
zmiennym polu magnetycznym, a więc także w
rdzeniu, przez który przepływa zmienny strumień
magnetyczny. Pod wpływem indukowanej w rdzeniu
SEM płyną w nim prądy wirowe
Prądy wirowe powodują nagrzewanie się rdzenia, gdyż
energia elektryczna dostarczona z obwodu
elektrycznego za pośrednictwem zmiennego pola
magnetycznego przy przepływie tych prądów przez
rezystancję rdzenia zamienia się na energię cieplną.
Jest to energia tracona bezużytecznie i powoduje
zbędny wzrost temperatury rdzenia. Energia tracona w
jednostce czasu nosi nazwę strat na prądy wirowe.
Gdy strumień zmienia się okresowo od zera do
indukcji maksymalnej Bm z częstotliwością f, wtedy
straty na prądy wirowe są równe:
Pw = kw Bm2 f2
Aby zmniejszyć straty na prądy wirowe, należy przeciąć drogę
przepływu tych prądów. W tym celu rdzenie magnetyczne
przewodzące zmienny strumień magnetyczny wykonuje się z
blach o grubości 0,35 – 0,5 mm, odizolowanych od siebie
papierem lub lakierem izolacyjnym. Rdzeń jest złożony z
pakietu blach o odpowiednim wykroju. Z pakietu blach
wykonuje się również rdzenie wirników maszyn
elektrycznych, które wirują w polu magnetycznym.
Dla dalszego zmniejszenia prądów wirowych dodaje się do
materiału rdzenia składniki zwiększające opór elektryczny
stawiany prądom wirowym, np. krzem SI, którego
kilkuprocentowy dodatek do żelaza powoduje znaczny wzrost
oporu elektrycznego. Nakrzemione blachy elektrotechniczne
są produkowane na potrzeby przemysłu elektrotechnicznego
jako blachy transformatorowe i blachy twornikowe.
Niekiedy zjawisko występowania prądów
wirowych jest wykorzystywane do celów
praktycznych. Np. w hamulcach
wiroprądowych wykorzystuje się prądy wirowe
indukowane w obracającej się tarczy metalowej
do wytworzenia momentu hamującego ruch
tarczy. W niektórych przyrządach
pomiarowych stosuje się tłumienie wahań
organu ruchowego za pomocą sił
mechanicznych, wytwarzanych przez prądy
wirowe indukowane w blaszce aluminiowej
poruszającej się w polu magnesu trwałego.
Zjawisko indukcji własnej (samoindukcji)
Zjawisko samoindukcji polega na tym, że gdy w
danym obwodzie płynie prąd zmienny,
wytwarzający zmienne pole magnetyczne,
wówczas pole to indukuje w tym samym obwodzie
siłę elektromotoryczną zwaną siłą
elektromotoryczną samoindukcji. SEM
samoindukcji jest określona wzorem:
d i
eL
dt
i – strumień magnetyczny
wytworzony przez prąd „i”
płynący w obwodzie,
eL – SEM samoindukcji.
Gdy wartość prądu i płynącego w kierunku dodatnim (prawoskrętnym)
wzrasta, strumień i rośnie, pochodna di/dt ma wartość dodatnią,
wówczas SEM eL ma kierunek ujemny, przeciwny do kierunku prądu. Pod
wpływem SEM eL płynie prąd w kierunku ujemnym, który wzbudza
strumień zgodnie z prawem Lenza przeciwdziałający zmianom strumienia
pierwotnego opóźniając wzrost prądu w obwodzie. Na odwrót gdy prąd w
obwodzie maleje, wówczas kierunek SEM samoindukcji jest zgodny z
prądem. W tym przypadku samoindukcja stara się opóźnić zanikanie prądu
w obwodzie.
Dla cewki o z zwojach SEM samoindukcji
między zaciskami cewki jest wyrażona
wzorem
d i
eL z
dt
Ponieważ:
iz
i
R
otrzymujemy:
2
z di
di
eL
L
R dt
dt
2
gdzie:
2
z
z
L
S
R
l
L –indukcyjność cewki.
Porównując tę zależność z wzorem : e z d i
L
dt
otrzymujemy:
d i
Lz
di
Indukcyjność jest współczynnikiem
proporcjonalności między prądem a strumieniem
magnetycznym, wytworzonym przez ten prąd
[ ]
V s
[ L]
1
1 s 1H
[i]
A
W praktyce stosuje się często jednostkę
podwielokrotną milihenr:
1 mH = 10-3 H.
Zgodnie z regułą Lenza SEM eL
przeciwdziała zmianom prądu, a więc przy
wzroście prądu (I + di) SEM eL ma zwrot
przeciwny do prądu, przy zanikaniu prąd
(I – di) SEM eL ma zwrot zgodny z prądem
Aby wzrastający prąd mógł przepłynąć przez
odcinek obwodu elektrycznego o
indukcyjności L, należy przezwyciężyć
przeciwdziałającą siłę elektromotoryczną
samoindukcji, a więc występujące na
indukcyjności napięcie wynosi:
u L eL
W związku z tym na elemencie obwodu o
indukcyjności L i zawsze istniejącej w nim
rezystancji R występują przy zmianie prądu (I + di)
dwa spadki napięcia:
di
u Ri L
dt
lub:
u uR uL
Z dotychczasowych rozważań wynika, że każdy przewód
musi posiadać indukcyjność L o określonej wartości,
ponieważ zmiana prądu jest związana ze zmianą
strumienia. Indukcyjności pojedynczych przewodów są
jednak małe w porównaniu z indukcyjnością cewek.
Ze wzoru
2
2
z
z
L
S
R
l
wynika, że
cewka nawinięta na rdzeniu ferromagnetycznym ma
znacznie większą indukcyjność niż cewka umieszczona w
powietrzu,
indukcyjność cewki nawiniętej na rdzeniu nie jest stała,
lecz zależy od nasycenia obwodu magnetycznego.
Dlatego w obwodach elektrycznych, które
powinny mieć dużą indukcyjność,
umieszcza się cewki o dużej liczbie zwojów,
nawiniętych na rdzeniu stalowym. Cewki
takie przeciwstawiają się narastaniu prądu
i dlatego nazywamy je dławikami. Dławiki
są ważnymi elementami
elektromagnetycznymi stosowanymi we
wszystkich gałęziach elektrotechniki.
Indukcja wzajemna
Indukowanie SEM w
cewce znajdującej się w
polu magnetycznym
wytworzonym przez
drugą cewkę nazywa się
indukcją wzajemną.
Sprzężenie obu cewek
przez strumień zwykle
nie jest całkowite i
wytworzony przez cewkę
1 strumień przenika tylko
częściowo cewkę 2
Obie cewki są wzajemnie sprzężone strumieniem 12,
który nazywa się strumieniem głównym, pozostała
część nazywa się strumieniem rozproszenia. Zmiana
prądu w cewce 1 powoduje zmianę strumienia, dzięki
czemu w cewce 2 indukuje się SEM:
d12
e2 z 2
dt
Podstawiając
otrzymamy:
i1 z1
12 k11 k1
R1
k1 z1 z2 di1
di1
e2
M 12
R1 dt
dt
W podobny sposób przy zamianie cewek:
k2 z1 z2 di2
di2
e1
M 21
R 2 dt
dt
Można wykazać, że
M12 = M21=M
Wielkość tę nazywa się indukcyjnością
wzajemną (współczynnikiem indukcji
wzajemnej) określonego układu cewek.
Jednostką indukcji wzajemnej jest henr.
W przypadku, gdy strumień rozproszenia jest
równy zeru, sprzężenie jest całkowite, wtedy:
M L1 L2
gdzie L1 i L2 - indukcyjności własne cewek 1 i 2
Przy sprzężeniu niecałkowitym we wzorze pojawia
się współczynnik sprzężenia k
M k L1 L2
Współczynnik sprzężenia k1 określa udział zwoju 1 w
wytwarzaniu wzajemnego strumienia magnesującego.
Współczynnik sprzężenia ma wartości ekstremalne
k = 0 i k = 1. Mogą być one osiągnięte przez
odpowiednie układy cewek.
Niesprzężone magnetycznie (k = 0) są dwa zwoje,
których powierzchnie są do siebie prostopadłe.
Prawie całkowicie sprzężone (k ≈ 1) są dwa
uzwojenia nawinięte współosiowo na wspólnym
rdzeniu z materiału magnetycznego. Współczynnik
rozproszenia definiuje się jako
1 k
2
gdzie σ – współczynnik rozproszenia.
Dla sprzężenia całkowitego k = 1, σ = 0.
Głównym przypadkiem zastosowania sprzężenia
całkowitego jest transformator.
Przebiegi łączeniowe w obwodzie z
cewką indukcyjną
W chwili załączenia obwodu (p – 1) prąd narasta
od I = 0 do I = U/R. Na skutek przyrostu prądu
indukuje się SEM samoindukcji
di
eL L
dt
która przeciwdziała przyrostowi prądu. To hamujące
działanie SEM samoindukcji powoduje, że prąd
dopiero po pewnym czasie osiąga wartość ustaloną
U
I
R
wg II prawa Kirchhoffa
Pamiętając, że
otrzymujemy
rozwiązanie tego
równania przy
warunku i = 0
dla t = 0
U+eL=Ri
di
eL L
dt
di
R i L U
dt
t
U
i 1 e T
R
L
T
R
elektromagnetyczna stała
czasowa obwodu [s]
Narastanie prądu przy włączeniu cewki
do obwodu prądu stałego
Prąd w obwodzie z
cewką indukcyjną,
włączonym na napięcie
U narasta według
funkcji wykładniczej i
to tym szybciej, im
mniejsza jest stała
czasowa obwodu, tj. im
mniejsza jest
indukcyjność L w
stosunku do rezystancji
R obwodu
Jeżeli obwód RL
zostanie zwarty (p - 2),
to w równaniu
di
R i L U
dt
należy przyjąć U = 0 ,
i otrzymujemy równanie
przy uwzględnieniu,
że dla t =0
di
i T
dt
U
iI
R
otrzymujemy rozwiązanie
i Ie
t
T
Zanikanie prądu przy zwarciu obwodu
Z powyższych rozważań wynika, że indukcyjność L przeciwstawia się
gwałtownej zmianie prądu w obwodzie, tak jak pojemność C
przeciwstawia się gwałtownej zmianie napięcia. Elementy L i C są więc
elementami zachowawczymi (konserwatywnymi).
Energia pola magnetycznego
Jeżeli równanie
di
R i L U
dt
pomnożymy stronami przez idt, otrzymamy
2
Uidt Ri dt Lidi
Wyrażenie Uidt przedstawia energię pobraną z sieci w czasie dt przez
obwód RL. Część tej energii Ri2dt zamienia się na ciepło wydzielone na
rezystancji R, pozostała część energii Lidi przedstawia energię, która
magazynuje się polu magnetycznym w związku ze wzrostem prądu i.
W dowolnej chwili, gdy prąd w obwodzie ma
wartość i, energia pola magnetycznego
mierzona w J wynosi
i
Li
Wm Lidi
2
0
2
Dla prądu ustalonego (i = I) energia pola
magnetycznego wynosi:
1 2
Wm LI .
2
Ostatnie równanie pozwala obliczyć energię
pola magnetycznego, zawartą w cewce o
indukcyjności L. Równanie to ma taką samą
postać, jak w mechanice wyrażenie
1
2
mv
2
Można więc powiedzieć, że indukcyjność L
wyraża bezwładność pola magnetycznego.
Energię pola magnetycznego można również
wyrazić przez podstawowe wielkości pola B i H
Z równania
Korzystając
również z
zależności
Iz
H
l
2
wyznaczamy
prąd cewki
2
z
z
L
S
R
l
1 z r 0
Wm
2
l
2
Hl
I
z
2
otrzymamy
1
Hl
2
S r 0 H Sl
2
z
Ponieważ
r 0 H B
oraz
Sl = V
energia pola magnetycznego jest określona zależnością:
BH
Wm
V
2
lub
Wm
B
2
2 r 0
V
Należy zwrócić uwagę, że indukcyjność L została
przyjęta przy całkowaniu jako wielkość stała. Jest
to słuszne wtedy, gdy również przenikalność μr
jest stała.