Pierwsze prawo kirchoffa:
Obwody elektryczne
Węzeł z prądami wpływającymi i wypływającymi
Dla węzła w obwodzie elektrycznym prawo to brzmi:
Dla węzła obwodu elektrycznego suma algebraiczna natężeń prądów wpływających(+) i
wypływających(–) jest równa zeru (znak prądu wynika z przyjętej konwencji)
lub
Suma natężeń prądów wpływających do węzła jest równa sumie natężeń prądów
wypływających z tego węzła.
Dla przypadku przedstawionego na rysunku I prawo Kirchhoffa można więc zapisać w
postaci:
przyjmując konwencję, że prądy wpływające do węzła są dodatnie, zaś wypływające są
ujemne i traktując je jak wielkości algebraiczne lub w postaci:
biorąc pod uwagę tylko wartości prądów i zapisując prądy wpływające po jednej, a prądy
wypływające po drugiej stronie równania.
W ogólnym przypadku wielu prądów prawo ma postać:
przy czym należy pamiętać, że prądom wypływającym przypisuje się ujemną wartość
natężenia.
Drugie prawo kirchoffa:
Drugie prawo Kirchhoffa – zwane również prawem napięciowym, dotyczy bilansu napięć w
zamkniętym obwodzie elektrycznym prądu stałego. Zostało ono sformułowane przez
niemieckiego fizyka Gustava Kirchhoffa. Prawo to jest oparte na założeniu, że opisywany
nim obwód nie znajduje się w zmiennym polu magnetycznym (w przypadku obwodów
znajdujących się w zmiennym polu magnetycznym zastosowanie ma prawo Faradaya).
Najczęściej prawo to jest formułowane w postaci:
W zamkniętym obwodzie suma spadków napięć na oporach równa jest sumie sił
elektromotorycznych występujących w tym obwodzie[1]
Przy czym obwód ten może być elementem większej sieci. Wówczas nosi on nazwę oczka
sieci. Prawo to zapisane równaniem ma postać
gdzie
– SEM k-tego źródła napięcia;
– spadek napięcia na i-tym elemencie oczka.
Dla oporów omowych
gdzie Ii jest natężeniem prądu płynącego przez opornik o oporze Ri.
Zarówno spadki napięcia jak i siły elektromotoryczne mogą przybierać wartości ujemne i
dodatnie. Ich znak ustala się w sposób:
ustala się kierunek obiegu obwodu (np zgodnie z ruchem wskazówek zegara
gdy kierunek prądu jest zgodny z kierunkiem obiegu, spadek napięcia jest dodatni (w
przypadku niezgodności – ujemny)
gdy SEM jest spolaryzowana zgodnie z kierunkiem obiegu, jej wartość jest dodatnia
Prawo to można wywieść z faktu, że krążenie wektora pola elektrycznego po zamkniętym
konturze ma wartość 0, jeżeli kontur ten zawarty jest w obwodzie prądu stałego przy braku
zmian pola magnetycznego przepływającego przez ten obwód, czyli
Traktując spadek napięcia jako jego ujemny przyrost, można II prawo Kirchhoffa
sformułować następująco
Suma spadków napięcia w obwodzie zamkniętym jest równa zeru[2]
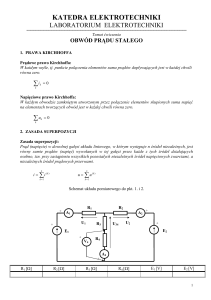
Przykład
Inny przykład obwodu zamkniętego
Dla przykładowego obwodu zamkniętego (pokazanego na rysunku obok) z prawa
napięciowego wynikają następujące własności:
gdzie rezystancja wypadkowa
Widać stąd, że w przypadku nierozgałęzionego obwodu II prawo Kirchhoffa redukuje się do
prawa Ohma.
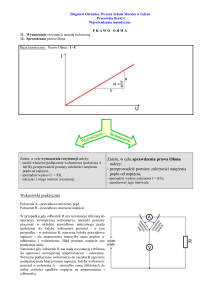
Pawo Ohma: Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego
końcami jest stały.
Prawo Ohma dla całego obwodu: Prawo Ohma dla całego obwodu mówi, że natężenie wzrasta gdy
napięcie zewnętrzne maleje (przeciwnie jak w prawie Ohma dla prądu elektrycznego).
Prawo Ohma dla prądu zmiennego:
Przerzutnik typu D (data) (ang. Flip-flop) – jeden z podstawowych rodzajów przerzutników
synchronicznych, nazywany układem opóźniającym. Przerzutnik ten przepisuje stan wejścia
informacyjnego D na wyjście Q. Przepisanie informacji następuje tylko przy odpowiednim
stanie wejścia zegarowego.
Najczęściej stosowana jest synchronizacja zboczem zegara, czyli przejściem z jednego stanu
logicznego do drugiego. Zbocze może być narastające (przejście z 0 na 1) lub opadające.
Innym rodzajem synchronizacji jest Latch (zatrzask, synchronizacja poziomem), który działa
w ten sposób, że w czasie trwania na wejściu zegarowym jedynki logicznej (lub zera, przy
synchronizacji poziomem niskim), wyjście Q powtarza stany podawane na wejście D. W
momencie zmiany stanu zegara następuje "zatrzaśnięcie" przerzutnika i od tej chwili
informacja na wyjściu Q, aż do następnego taktu zegarowego, pozostaje niezmienna.
Typowym zastosowaniem przerzutnika typu Latch jest zapamiętanie chwilowego stanu szyny
danych w celu zobrazowania go na wyświetlaczu. Synchronizacja poziomem w porównaniu
ze zboczową jest mniej odporna na zakłócenia.
Oprócz synchronicznego wejścia typu D przerzutnik posiada często również asynchroniczne
wejścia typu S (Set) i R (Reset). Służą one do ustawiania (S) i zerowania przerzutnika (R).
Wejścia asynchroniczne mają większy priorytet od wejścia synchronicznego i działają nawet
wtedy, gdy na wejście zegarowe nie jest podawany odpowiedni stan.