1. Podstawy teorii magnetyzmu
1.1 Pole magnetyczne i jego charakterystyka
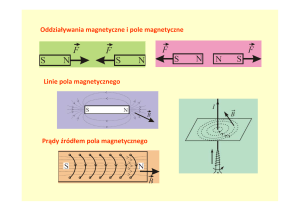
Pole magnetyczne przyciąga lub odpycha ciała namagnesowane. Siła
oddziaływania F (przyciągania lub odpychania) dwóch biegunów magnetycznych
dwóch różnych magnesów o wartości magnetyzmu m oraz m 1 może być obliczona
zgodnie z prawem Colomba :
(1.1)
mm1
F
4r 2
gdzie:
r
– odległość między współdziałającymi biegunami;
- przenikalność magnetyczna środowisk wyrażona w henrach na metr.
Przenikalność magnetyczna jest to wielkość określająca zdolność danego
materiału (środowiska) do zmiany indukcji magnetycznej pod wpływem natężenia
pola magnetycznego. Przenikalność magnetyczna bezwzględna próżni jest skalarem,
który oznacza się symbolem μ0 i którego wartość wynosi w układzie SI:
gdzie
H
- natężeniem pola magnetycznego.
Między natężeniem pola magnetycznego H a indukcją magnetyczną B zachodzi
relacja:
B H
Jeżeli jeden z ładunków, przykładowo
m1
jest równy jedności, to siła
oddziaływania pomiędzy nimi nazywa się natężeniem pola magnetycznego, które jest
najważniejszym elementem charakteryzującym pole magnetyczne:
F
H
m1
Ze wzorów 1.1 a 1.2 można napisać:
(1.2)
Н
m
4r 2
Ten wzór określa natężenie pola magnetycznego w punkcie znajdującym się w
odległości od danego bieguna źródła pola magnetycznego.
r
Magnes rzeczywisty ma dwa bieguny, a natężenie pola magnetycznego w
dowolnym punkcie zależy od ich oddziaływania. Magnesy najczęściej mają formę
cylindrycznej lub prostokątnej sztaby. Wzdłużna oś symetrii takiej sztaby żelaza jest
główną osią symetrii wzdłuż której sztaba jest namagnesowana. Największe znaczenie
na oddziaływanie magnetyczne od strony praktycznej ma wektor natężenia pola
magnetycznego w kierunku wzdłużnej osi symetrii oraz w kierunku poprzecznej osi
symetrii magnesu (rys. 1.1).
Rys.1.1.Wektor natężenia pola magnetycznego w kierunku
wzdłużnej i poprzecznej osi magnesu.
Biegun magnesu z dodatnim ładunkiem
m
oddziaływają w punkcie
P1
m
oraz biegun z ujemnym ładunkiem
wzdłuż wzdłużnej osi magnesu z siłą Н1:
m
1
1
H1
2
2
40 r l / 2
r l / 2
(1.3)
Wzór 1.3 można przekształcić do wzoru:
2M
1
H1
4 r 3 1 l / 2r 2
gdzie
(1.4)
2
M
Wartość
M
ml
0
przyjęto nazywać momentem magnetycznym magnesu. W
kompasach morskich odległość
kompasu do magnesów-kompensatorów jest
wielokrotnie większa od długości magnesów
. Uwzględniając tą nierówność
(r ≻≻l )
wzór 1.4 z dużą dokładnością można uprościć do postaci:
(1.5)
2M
H1
4 r 3
P2
Natężenie pola magnetycznego w kierunku poprzecznej osi magnesu w punkcie
określa się w analogiczny sposób:
M
1
H2
3
4 r 1 (l / 2r ) 2
Uwzględniając że
r ≻≻l
(1.6)
3/ 2
, wzór 1,6 z wysoką dokładnością można uprościć do postaci:
M
H2
4 r 3
(1.7)
Analiza równań 1.5 a 1.7 wskazuje, że natężenie pola magnetycznego w każdym
punkcie głównej i poprzecznej osi magnesu prostoliniowo zależy od momentu
magnetycznego М.
Przy takiej samej odległości natężenie pola na wzdłużnej osi jest w dwa razy
r
większe niż na osi poprzecznej.
Natężenie pola magnetycznego w kierunku jednej i drugiej osi zależy odwrotnie
proporcjonalne do trzeciej potęgi odległości. Z tego wynika, że najbardziej efektywną
metodą zmniejszenia wpływu oddziaływania żelaza okrętowego na kompas jest
ustawienie kompasu jak najdalej od tego żelaza.
1.2. Magnetyzm ziemski
Wiadomo, że Ziemia jest ogromnym naturalnym magnesem. Bieguny Ziemi odchylone
są od biegunów geograficznych.
Rys. 1.2 Pole magnetyczne Ziemi
Współrzędne geograficzne północnego bieguna magnetycznego w dniu
01.01.2005r. to:
82 0 07 N ; 114 0 04W .
zaś współrzędne południowego bieguna magnetycznego w dniu 01.01.2004r.to:
63 0 05S ; 138 0 00 E.
W biegunach magnetycznych Ziemi spotykają się linie sił pola magnetycznego
tak jak zachodzi to w zwykłych magnesach (rys.1.2).
Prosta styczna do linii sił pola magnetycznego wyznacza kierunek wektora
natężenia Т pola magnetycznego Ziemi w danym jej punkcie. Zawieszona w sposób
swobodny, zbalansowana igła magnetyczna ustawia się w kierunku tego wektora.
Wektor natężenia T można rozłożyć na dwie składowe – poziomą składową Н oraz
pionową składową Z. Igła morskiego kompasu magnetycznego ustawia się w kierunku
poziomej składowej magnetyzmu ziemskiego Н, wskazując kierunek południka
magnetycznego. Wynika to z faktu podwieszenia igły na pływaku utrzymującym igłę
w położeniu prostopadłym do kierunku działania pola grawitacyjnego. Kąt I
pomiędzy wektorami Н a Т (rys. 1.3.) nazywa się kątem inklinacji lub znacznie
rzadziej nazywany jest szerokością magnetyczną.
Rys. 1.3 Elementy magnetyzmu Ziemskiego.
Punkty o zerowych kątach inklinacji tworzą równik magnetyczny. Punkty, w
których kąt inklinacji I jest równy 900 nazywa się biegunami magnetycznymi.
Najważniejsze zależności pomiędzy wektorami Н, Z a T mają postać:
H T cos I ; Z T sin I ; I arctg
Z
.
H
Natężenie pola magnetycznego Ziemi można obliczyć ze wzoru:
Т
M
R3
(1.8)
1 3 sin m
2
gdzie: R – promień Ziemi;
- szerokość magnetyczna;
m
M
- moment magnetyczny Ziemi, jako magnesu.
Poziomą składową Н oraz pionową składową Z pola magnetycznego Ziemi można
obliczyć ze wzorów:
M
H 3 cos m
R
2M
Z 3 sin m
R
Stosunek
jest wartością stalą dla całej kuli Ziemskiej. Średnia wartość
M
k 3
R
współczynnika
(1.9)
k
jest równa 0,35. Na podstawie
zależności 1.9 można obliczyć
składowe H, Z oraz kąt inklinacji I dla dowolnego punktu na powierzchni Ziemi.
Reasumując: pole magnetyczne Ziemi charakteryzuje natężenie pola T. Wektor
natężenia pola magnetycznego T tworzy z płaszczyzną poziomą kąt I, zwany
inklinacją magnetyczną. Rzut wektora natężenia pola magnetycznego T na
płaszczyznę poziomą nazywamy składową poziomą H. Kierunek składowej poziomej
H tworzy z południkiem geograficznym kąt d, zwany deklinacją magnetyczną lub
zboczeniem
magnetycznym.
Tak
więc
podstawowymi
wielkościami
charakteryzującymi pole magnetyczne Ziemi są: składowa pozioma H wektora
natężenia pola magnetycznego, inklinacja I oraz deklinacja d. Wartości oraz znaki
deklinacji magnetycznej d są podane na mapach nawigacyjnych a nawigator
uwzględnia je przy wykorzystaniu wskazań kompasu magnetycznego. Wartości
deklinacji d podaje się na rok wydania mapy. Obok podaje się informacja o rocznej
zmianie deklinacji, która uwzględnia się przez nawigatorów.
1.3. Zasady budowy kompasu magnetycznego
Igła kompasu magnetycznego znajduje się w tarczy kompasowej zawieszonej
swobodnie na pionowej osi. Tarcza kompasowa znajduje się pod wpływem działania
momentu, który jest iloczynem siły magnetycznej
oraz ramienia
.
mH
l sin
Moment L jest momentem kierującym położeniem tarczy a jego wartość (rys.1.4) jest
równa:
L mHl sin
(1.10)
Moment siły L wymusza ruch tarczy kompasowej, który się odbywa dopóki kąt
pomiędzy wektorem Н a osią tarczy kompasowej jest równym zeru.
Ustawienie się igły magnetycznej wzdłuż linii wektora H (południka
magnetycznego) powoduje równowagę tej igły. W tym położeniu kąt
oraz ramię
momentu sił
l sin
równe są zero.
Igła kompasu magnetycznego wskazuje południk kompasowy, który daje
kierunek odniesienia do odczytu kursów oraz namiarów kompasowych.
Rys.1.4 Igła kompasu w polu magnetycznym.
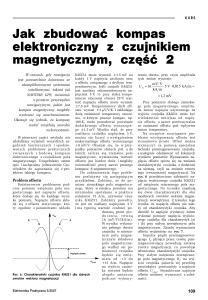
Czujnik kompasu magnetycznego przedstawionego na rys.1.5 zawiera sześć
magnesów sztywno zamontowanych na pływaku kompasu.
Sztywna konstrukcja złożona jest z magnesów o różnej długości i
zaprojektowana jest tak, aby wpływ dewiacji wyższych rzędów mógł być
maksymalnie skompensowany (wyeliminowany).
Na pływaku znajduje się wyskalowana w stopniach róża do odczytu wskazań
kompasu. Pływak zawieszony jest na osi, która wsparta jest na łożysku. Kociołek
kompasu napełniony jest płynem.
Tarcza kompasowa ma małą ujemną pływalność i z tego powodu oś - szpilka
opiera się na gładko szlifowanym łożysku z kamienia, zapewniając minimalny nacisk
w punkcie oporu. W takich warunkach mały nacisk szpilki na kamień łożyska
zapewnia minimalne tarcie w punkcie zawieszenia.
Rys.1.5 Kociołek kompasu magnetycznego МК 145: 1 — nadajnik indukcyjny; 2 — szyba; 3 — igły
magnetyczne; 4 — kompensator powietrzny; 5 — ekran cylindryczny; 6 — pływak; 7 — oświetlenie; 8 —
szpilka; 9 — szyba; 10 — łożysko kamienne; 11 — korpus wodoszczelny; 12 — obudowa.
Sposób ten zapewnia także centrowanie tarczy kompasowej, eliminując jej
prostoliniowy ruch w płaszczyźnie poziomej oraz pionowej. Poruszanie się pływaka
zanurzonego w płynie zapewnia także mały nacisk na łożysko a co za tym idzie małą
siłę tarcia.
Obserwację tarczy kompasu w warunkach nocnych zapewnia oświetlenie
elektryczne. Oświetlenie to znajduje się nad górną szybą kompasu.
Dolną część obudowy kociołka kompasu stanowi ciężar obniżający środek
ciężkości poniżej punktu zawieszenia, co ułatwia balans kociołka podczas pracy
statku na fali. Nadajnik indukcyjny wysyła sygnał elektryczny wskazań kursu
kompasowego do bloku przekazu kursu.
Przekaz kursu uzyskiwany jest przy pomocy repetytorów analogicznych do
żyrokompasowych. Tarcza kompasowa w polu magnetycznym Ziemi zachowuje się
jak element oscylacyjny. Oscylacje tarczy są tłumione za pomocą tarcia pomiędzy
pływakiem a płynem w którym jest zanurzony.
Skład chemiczny płynu kompasowego zapewnia pracę kompasu w warunkach
mrozu arktycznego, a także skwaru tropikalnego, utrzymując jego czystość i
przezroczystość.
Kompensator powietrzny zapewnia kompensacją objętości płynu kompasowego
przy zmianach jej temperatury, a tym samym chroni kociołek kompasu przed
deformacjami i zapobiega jego uszkodzeniu. Kociołek kompasu jest umieszczony na
zawieszeniu Kardana, które zapewnia utrzymanie kociołka w płaszczyźnie poziomej w
warunkach kołysania.
Rys.1.6 Widok podstawy kompasu magnetycznego typu МК-145
z kompensatorami bezindukcyjnymi dewiacji ćwierćokrężnej i
kompensatorami wpływu szerokości.
Konstrukcja kociołka kompasu zapewnia jego wodoszczelność. Pojawienie się
bąbelków powietrza pod szybą kompasu jest niedopuszczalne. W tych przypadkach
trzeba uzupełnić płyn i sprawdzić wodoszczelność kociołka. Kompas magnetyczny
jest przystosowany do instalacji namiernika.
W podstawie kompasu znajdują się magnesy kompensacyjne. Przekazywanie
wskazań kompasu do miejsca gdzie znajduje się sternik uzyskuje się poprzez
zastosowanie pionowej rury z zestawem optycznym (peryskopu).
2. Pole magnetyczne statku
2.1. Zachowanie się metalów w polu magnetycznym
Wszystkie metale ze względu na zachowanie się
podzielić na trzy rodzaje:
- Materiały diamagnetyczne, które mają
≺1 ; ≺0
materiału, χ – podatność magnetyczna, przy czym
1
w polu magnetycznym można
(μ-przenikliwość magnetyczna
). Do takich materiałów zaliczają
się: złoto, srebro, miedź, cynk [1]. Nieznacznie osłabiają one pole magnetyczne.
- Materiały paramagnetyczne, których
. Do takich materiałów zaliczają się
≻1; ≻ 0
platyna, aluminium, chrom, molibden. Materiały paramagnetyczne nieznacznie wzmacniają
pole magnetyczne.
- Materiały ferromagnetyczne, których
≻≻1; ≻ 0
. Do takich materiałów zaliczają się
żelazo, kobalt, nikiel oraz ich stopy, a także rzadkie pierwiastki. Materiały ferromagnetyczne
wydatnie wzmacniają pole magnetyczne.
Żelazo okrętowe można podzielić na dwa rodzaje: żelazo magnetycznie twarde oraz
magnetycznie miękkie w zależności od formy pętli histerezy. Opóźnienie zmiany indukcji B
w stosunku do natężenia Н nazywa się zjawiskiem histerezy magnetycznej. Jeżeli
ferromagnetyk umieścimy w polu magnetycznym i zaczniemy zwiększać natężenie pola Н, to
wartość indukcji magnetycznej B w materiale będzie wzrastać do wartości B m., tak zwanej
granicy nasycenia. Na rys. 2.1 ten proces zobrazowany jest przy pomocy krzywej pomiędzy
punktami (0, 1).
Rys. 2.1 Pętla histerezy.
Zmniejszenie natężenia pola magnetycznego Н powoduje zmniejszenie wartości
indukcji magnetycznej B. Ta zmiana zobrazowana jest na krzywej (punkty 1-2). W
punkcie 2 przy Н=0 wartość indukcji magnetycznej В0 nazywa się ostateczną
indukcją magnetyczną.
To oznacza, że ferromagnetyk nie powraca do stanu początkowego, a zachowuje
namagnesowanie ostateczne.
W celu usunięcia namagnesowania ostatecznego ferromagnetyka potrzebna jest
zmiana znaku pola magnetycznego.
Wartość natężenia pola HC, przy której indukcja równa się zeru nazywana jest siłą
koercytywna (siłą utrzymania). Przy dalszym wzrastaniu natężenia ferromagnetyk
przemagnesuje się aż do stanu nasycenia. Dalsze zmiany natężenia pola
magnetycznego (punkty 4,5,6,1) powodują zamykanie dolnej gałęzi pętli histerezy.
Zależność indukcji magnetycznej B od natężenia Н ma charakter nieliniowy.
Zjawisko histerezy znacznie wpływa na zmianą stanu magnetycznego statku przy
zmianach kursu.
Z tego powodu podczas manewrów wykonywanych w czasie procesu
kompensacji dewiacji statek powinien płynąć nowym stałym kursem służącym do
wykonania obserwacji nie krócej niż 3 minuty.
Pytania kontrolne:
1. Podaj zależność działania siły magnetycznej w funkcji odległości żelaza od kompasu
magnetycznego.
2. Co to jest kąt deklinacji magnetycznej?
3. Co to jest kąt inklinacji magnetycznej?
4. W jakim celu w kompasie wykorzystano płynne zawieszenie tarczy kompasowej?
5. Co to jest moment kierujący kompasu magnetycznego?
6. Omów budowę kompasu magnetycznego.