otoczenia,
w którym
pracuje ko
offsetu mo�e wynie��
+/-7,5
mV. Temperaturowy
powstanie
dodatkowego
offsetu
wynosi +/-3 <m>V/V/K i zak�adaj�c du��
zmienn
st�d,
�e
przy
zasilaniu
otoczenia, w którym pracuje kompas, np.czujni
100 K
liczy� zoffsetu
wyst�pieniem
maksymal
powstanie dodatkowego
wynosz�cego
+/9 mV/V. Okazuje
si�,
K �e
U R Sw przy
st�d, �e przy zasilaniu
czujnika
napi�ciem
5
takich zalicza
si� ziemskie
liczy� z wyst�pieniem
maksymalnego
offsetu po
wy
jest bardzo
du
9 mV/V. Okazujewarto��
si�, �eoffsetu
w przypadku
pomiarów
prostegopole
kompasu
8-segme
takich zalicza nawet
si� ziemskie
magnetyczne,
zobrazowania
tego
problemuun
warto�� offsetuDojest
bardzo du�a
i mog�aby
Za�ó�my, �e do pom
nawet prostego przyk�adem.
kompasu 8-segmentowego.
w miejscu
Do zobrazowaniamagnetycznego,
tego problemu które
pos�u�ymy
si� n
w praktyce
15 A/m, u
przyk�adem. Za�ó�my,
�e donat��enie
pomiaru ziemskiego
�e jest pomiaru
on zasilany
n
magnetycznego, ponadto,
które w miejscu
ma min
czu�o�ci
podawan�
przez
produc
w praktyce nat��enie 15 A/m, u�ywamy czujnika
wyniku
wykonania
pe�nego 5obrot
ponadto, �e jest
on zasilany
napi�ciem
V i
magnetycznym
sk�adowa
pola mag
czu�o�ci podawan� przez producenta, równ�
16
czujnika
zmienia�a
wyniku wykonania
pe�negob�dzie
obrotusi�
czujnika
w mi
wania
wyj�ciu
czujnika
obrotu,
przymagnetycznego
czym równie�
amplituda b�dzi
KMZ51 może wynosić
±1,5 mV na sk�adowa
magnetycznym
pola
wzd�
każdy 1 V napięcia
zasilania
oraz
tych
zmian
wyniesie:
obrotu,
przy
czujnika b�dziewykonywania
si� zmienia�a
od -15
do czym
+15 A
z offsetu związanego z dryftem temmV Vb�dzie ulega�o zmian
wyj�ciu czujnika równie�
U m � 16
� 5 V � 0,015 kA m � 1,2 mV
peraturowym. Jeśli czujnik KMZ51
wykonywania
obrotu,
przy
kA m czym amplituda tych
jest zasilany rekomendowanym namV V
pięciem 5 V, to przy
pomiarze
U m �stałej
16 tempe� 5 V � 0Przy
,015 kA
m � 1,2 mVs�abego ziemskie
raturze otoczenia równej
25°C
kA mwar- zmian napi�cia u�ytecznego na
tość napięcia offsetu może wynieść
Przy pomiarze słabego
ziemskiewielokrotnie
mniejsza
napi�
Przy pomiarze s�abego
ziemskiego
polaodmagnety
±7,5 mV. Temperaturowy dryft off- go pola magnetycznego, amplituzmiani zakładając
napi�cia da
u�ytecznego
wyj�ciu na
czujnik
setu wynosi ±3 mV/V/K
zmian napięcianaużytecznego
wielokrotnie
mniejsza
od
napi�cia
offsetu,
a
dużą zmienność temperatury otocze- wyjściu czujnika KMZ51 może być
Jak zbudować kompas
elektroniczny z czujnikiem
magnetycznym, część 2
W czasach, gdy nawigacja
jest powszechnie kojarzona ze
skomplikowanymi systemami
satelitarnymi, takimi jak
NAVSTAR GPS, mówienie
o prostym przyrządzie
nawigacyjnym, jakim jest
kompas magnetyczny mogłoby
wydawać się anachronizmem.
Okazuje się jednak, że kompasy
nadal znajdują szerokie
wykorzystanie.
W pierwszej części artykułu nie
zdołaliśmy wyjaśnić wszystkich zagadnień teoretycznych i spodziewanych problemów praktycznych
związanych z budową kompasu
elektronicznego z czujnikiem pola
magnetycznego. Uzupełniamy zatem
opis i zachęcajmy jednocześnie Czytelników do zapoznania się z projektem takiego kompasu.
Problem offsetu
Podstawowym problemem podczas pomiaru natężenia pola magnetycznego jest napięcie offsetu,
które dodaje się do każdego wyniku pomiaru. Napięcie offsetu składa się z offsetu statycznego, który zgodnie z parametrami układu
Rys. 6. Charakterystyki czujnika KMZ51
zwrotów wektora magnetyzacji
Elektronika Praktyczna 5/2007
nia, w którym pracuje kompas, np.
100 K, może powodować powstanie
dodatkowego offsetu wynoszącego ±1,5 mV. Wynika stąd, że przy
zasilaniu czujnika napięciem 5 V,
można się liczyć z wystąpieniem
maksymalnego offsetu wynoszącego
±9 mV/V. Okazuje się, że w przypadku pomiarów słabych pól, a do
takich zalicza się ziemskie pole
magnetyczne, wymieniona wartość
offsetu jest bardzo duża i mogłaby
uniemożliwić pracę nawet prostego
kompasu 8–segmentowego.
Do zobrazowania tego problemu posłużymy się następującym
przykładem. Załóżmy, że do pomiaru ziemskiego pola magnetycznego, które w miejscu pomiaru ma
minimalne spotykane w praktyce
natężenie 15 A/m, używamy czujnika KMZ51. Załóżmy ponadto,
że jest on zasilany napięciem 5 V
i ma typową wartość czułości podawaną przez producenta, równą
16 (mV/V)/(kA/m).
W wyniku wykonania pełnego obrotu
czujnika w mierzonym polu magnetycznym składowa
pola magnetycznego wzdłuż osi pomiarowej czujnika
będzie się zmieniała od –15 do
+15 A/m. Napięcie
na wyjściu czujnika również będzie
ulegało zmianom
dla różnych
podczas wykony-
wielokrotnie mniejsza od napięcia offsetu, a nawet porównywalna
ze zmianami offsetu pod wpływem
zmian temperatury.
Na szczęście rozwiązanie problemu występowania offsetu jest
stosunkowo proste. Offset można
wyznaczyć za pomocą specjalnej
techniki przemagnesowania czujnika,
a następnie odejmować od kolejnych
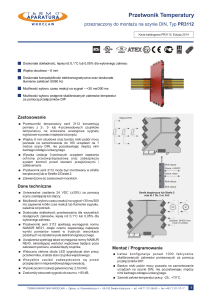
wyników pomiarów. Wyznaczanie napięcia offsetu opiera się na zmianie
charakterystyki czujnika z dodatniej
na ujemną, czyli na zmianie zwrotu
jego wewnętrznej magnetyzacji. Na
rys. 6 przedstawiono zależność napięcia wyjściowego czujnika KMZ51
od natężenia mierzonego pola magnetycznego. Na rysunku znajdują
się dwie charakterystyki dla obu
możliwych zwrotów wektora magnetyzacji wewnętrznej. Z rysunku tego
wynika, że napięcie offsetu nie zależy od charakterystyki czujnika. Aby
określić to napięcie wystarczy zatem
wykonać pomiary napięcia wyjściowego czujnika dla charakterystyk (a)
i (b) przy stałym zewnętrznym polu
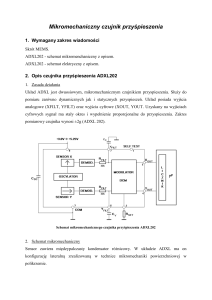
magnetycznym. Zasadę wyznaczania
offsetu wyjaśniono na rys. 7.
Impulsy prądu przemagnesowującego IF płynące przez cewkę przemagnesowującą powodują zmianę
zwrotu magnetyzacji, co powoduje
odwrócenie charakterystyki czujnika.
Przy stałym natężeniu zewnętrznego pola magnetycznego Hx, na wyjściu czujnika pojawia się przebieg
prostokątny przesunięty o napięcie
offsetu Uoffset. Poszukiwane napięcie
offsetu możemy wyznaczyć z zależności:
109
przemagnesowuj�c� powoduj� zmian� zwrotu magnetyzacji, co
powoduje odwrócenie charakterystyki czujnika. Przy sta�ym
nat��eniu zewn�trznego pola magnetycznego Hx, na wyj�ciu
K U R S czujnika pojawia si� przebieg prostok�tny przesuni�ty o
napi�cie offsetu Uoffset. Poszukiwane napi�cie offsetu mo�emy
wyznaczy� z zale�no�ci:
mikrokontroler, który
1
U offset � �U p � U n �
na podstawie zmie2
rzonych wartości
musimy
wyznacza�
offsetu
przed ka�dym pomiarem, poniewa�
wyjściowych
Nie Nie
musimy
wyznaczać
offsetu napięć
z
obu
czujników
przed każdym
pomiarem,
ponieważ
jego warto�� nie ulega szybkimokrezmianom i raz zmierzona
jego wartość
nie ulega
szybkim ślaprzez
mierzonyd�u�szy
kierunek
zachowuje
aktualno��
czas. Poza tym cz�ste
zmianom i raz zmierzona zachowu- (azymut). Zależność
mierzenie
offsetu
powoduje
zwi�kszone
zu�ycie energii ze
je aktualność przez dłuższy czas.
napięć z czujników
�ród�a
jednak pami�ta�, �e warto�� offsetu
magnetorezystancyjPoza tym
częste zasilania.
mierzenie offsetuNale�y
powoduje
zwiększone
zużycie
ener- nych
ustawie- zmian temperatury lub
mo�e
ulega�
zmianom,
np. od
w wyniku
gii ze napi�cia
nia
źródła zasilania.
Należy
jedich
osi
czułości
zasilania. Z tego wzgl�du,
co pewien czas nale�y
nak pamiętać, że wartość offsetu względem wektora
aktualizowa�
jego
warto��.
Cz�stotliwo��
wykonywania procedury
może ulegać zmianom, np. w wyni- pola magnetycznego
pomiaru
offsetu
jest
zale�na
od
aplikacji
i mo�e wynosi� od
ku zmian temperatury lub napięcia wyjaśniono na rys. 8.
zasilania.
Z tegosekund
względu, do
co kilku
pe- Po ka
zano na nim
kilku
minut.
wien czas należy aktualizować jego cztery podstawowe
wartość. Częstotliwość wykonywania
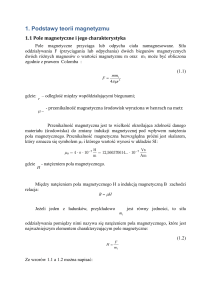
Jak okre�li� azymut?położenia czujników
procedury pomiaru offsetu jest za- R i P względem skłaJednym
dowej poziomejjest
leżna od
aplikacjiz i mo�liwych
może wynosić rozwi�za�
wek- zastosowanie dwóch czujników
od kilku
sekund
do kilku minut.
tora pola
magnetyczRys. 7. Zasada
pomiaru napięcia
pola
magnetycznego,
np.
KMZ51.
Czujniki
te powinny
by�offsetu
nego
Ziemi.
Literą
R
zamontowane w taki sposób, aby o� pomiarowa (o� czu�o�ci)
oznaczono czujnik równoległy do osi sprawdzenia, w jakich przedziałach
Jak określić azymut?
jednego z czujników by�a
równoleg�a, natomiast o� czu�o�ci
Jednym z możliwych rozwiązań odniesienia kompasu, natomiast literą mieszczą się wartości obu napięć
drugiegodwóch
czujnika
prostopad�a
kompasu.
Ur i Up. W idealnym
P oznaczono
czujnik do do
niej osi
prosto-odniesienia
jest zastosowanie
czujnikówby�a
przypadku napadły.jest
pola magnetycznego,
np. KMZ51.
Przy każdym
czterech poka- w pięcia
obu obiektów,
czujników zależą od
O� odniesienia
kompasu
osi� zkierowan�
stron�
Czujniki
te powinny
być zamontozanych
kompasu w sposób
na rys. 8 położeń
których
azymut
chcemy
wyznaczy�.
Naszkompasu
kompas kierunku
b�dzie osi
wyznacza�
wane w taki sposób, aby oś pomiaro- napięcie jednego z czujników przyj- przedstawiony na rys. 9. Założono
k�t zawarty pomi�dzy t� w�a�nie osi�, a lokalnym po�udnikiem
wa (oś czułości) jednego z czujników muje wartość zerową. Znak napięcia tutaj, że czułości obu czujników są
magnetycznym.
była równoległa,
natomiast oś czuło- z drugiego czujnika wskazuje wów- takie same, a ich offset całkowicie
Podczas
pracy
kompasczas,
powinien
umieszczony
poziomo, aWówczas
jego wartości
ści drugiego
czujnika
była prostopaw którym by�
z dwóch
możliwych skompensowany.
U r i U p można przedstawić
dła do znacz�ce
kierunków
jest skierowany
kompas. napięć spowoduje
osi odniesieniaodchylenie
kompasu. Oś od
p�aszczyzny
horyzontalnej
odniesienia kompasu jest osią kiero- Przykładowo, przy równoległym usta- jako zbiór punktów okręgu o prozwi�kszenie b��dów pomiarowych na skutek dodatkowego
waną w stronę obiektów, których azy- wieniu osi kompasu względem pół- mieniu Umax. Napięcie Umax stanowi
oddzia�ywania
czujniki
KMZ51 sk�adowej
ziemskiego
mut chcemy
nocy magnetycznej,
wyznaczyć. Naszna
komnapięcie z czujni-pionowej
maksymalną
wartość napięcia wyjpas będzie wyznaczał kąt zawarty ka R przyjmuje wartość większą od ściowego czujnika, a więc także ampomiędzy tą właśnie osią, a lokalnym
zera Ur>0, zaś na wyjściu czujnika
plitudę zmian napięcia na wyjściu
południkiem magnetycznym.
czujnika przy jego obrocie w ziemP, którego oś czułości jest prostopadła
Podczas pracy kompas powinien
do składowej poziomej wektora pola skim polu magnetycznym o kąt pełbyć umieszczony poziomo, a jego
magnetycznego, napięcie wynosi zero ny. Znak ujemny przy napięciu Up
znaczące odchylenie od płaszczyzny
Up=0.
wynika z ustawienia osi czułości
horyzontalnej spowoduje zwiększeW dalszych rozważaniach przyj- czujnika P na płytce kompasu. Jak
nie błędów pomiarowych na sku- m i e m y d l a
tek dodatkowego oddziaływania na u p r o s z c z e n i a
czujniki KMZ51 składowej piono- z a ł o ż e n i e , ż e
wej ziemskiego pola magnetyczne- kompas będzie
go. Zapewnienie poprawnej pracy wskazywał tylko
urządzenia w warunkach odchyleń 8 wyróżnionych
od poziomu jest możliwe przez za- kierunków, nie
ma zatem po stosowanie swobodnego zawieszenia
modułu kompasu (rozwiązanie me- trzeby obliczachaniczne) lub przez dodanie do nia funkcji ataukładu pionowego czujnika magne- n 2 ( ) , o k t ó r e j
tycznego i co najmniej dwóch po- b y ł a m o w a w
ziomych czujników przyspieszenia pierwszej części
artykułu, a wy(rozwiązanie elektroniczne).
Jeśli kompas elektroniczny zostanie starczy jedynie
ustawiony w płaszczyźnie horyzon- sprawdzić, któtalnej, czujniki magnetorezystancyjne ry z 8 kierunbędą mierzyły składową równoległą kó w z n a j d u j e
i prostopadłą względem osi odniesie- s i ę n a j b l i ż e j
nia kompasu składowej poziomej na- k i e r u n k u o s i
tężenia ziemskiego pola magnetyczne- odniesienia. De- Rys. 8. Wartości napięć z czujników magnetycznych przy
go. Przetwarzanie wyników pomiarów cyzję podejmuje ustawieniu osi odniesienia kompasu równolegle do jednego
obu składowych może wykonywać s i ę w w y n i ku z czterech kierunków głównych (N, S, W, E)
110
Elektronika Praktyczna 5/2007
migotaniem
diod„skakania”
LED,
szczegó
migotaniem diod
LED, szczególnie
przy
Do migotaniem
eliminacji
granicy
se
granicy
segmentów
azymutu.
migotaniem
diod
LED,
szczególnie
przy
u
migotaniem
diod
LED,
szczególnie
prz
migotaniem
diod
LED,
szczególni
Do
elimina
granicy segmentów
azymutu.
u�rednianie.
Algorytm
obl
Dosegmentów
eliminacji
„skakania”
wyn
granicy
segmentów
azymutu.
granicy
azymutu.
granicy
segmentów
azymutu.
u�redniani
Do eliminacji
„skakania”
wyników
pomi
realizacji
ko
Do eliminacji
„skakania”
wyników
pomiar
Algorytm
oblicz
Dopraktycznej
eliminacji
„skakania”
wyników
pom
Dou�rednianie.
eliminacji
„skakania”
wynikó
praktyczne
migotaniem diod LED,
szczególnie
przy
ustawieniach
kompasu
na
migotaniem
diod LED,
szczególnie
przy
ustawieniac
u�rednianie.
Algorytm
obliczania
�redni
u�rednianie.
Algorytm
obliczania
�re
u�rednianie.
Algorytm
obliczania
�red
praktycznej
realizacji
kompa
u�rednianie.
Algorytm
obliczani
wyja�nienia.
Jak
wiadomo
K Uwyja�nieni
RS
granicy segmentów
azymutu.
granicy
segmentów
azymutu.
praktycznej
realizacji
kompasu
wymaga
j
praktycznej
realizacji
wymag
praktycznej
realizacji
kompasu
wyja�nienia.
Jakkompasu
wiadomo
pomiarów
w
praktycznej
realizacji
kompasu
wymaga
Do eliminacji „skakania”
wyników
pomiarów
mo�na
zastosowa�
ich �re
pomiarów
wynosi:
Do eliminacji
„skakania”
wyników
pomiarów
mo�na
z
wyja�nienia.
Jak Jak
wiadomo
�rednia
ruchom
wyja�nienia.
wiadomo
�rednia
ruc
wyja�nienia.
Jak
wiadomo
�redni
pomiarów
wynosi:
u�rednianie. Algorytm
obliczania
�redniej
zastosowany
xkruch
u�rednianie.
Algorytm
obliczania
�redniej
zastoso
� N �1x� x
wyja�nienia.
Jak
�rednia
pomiarów
wynosi:
pomiarów
xwiadomo
xxk k�wymaga
�1 �krótkiego
� ...wjednak
x�
pomiarów
xk��1N �wynosi:
xkk ��x1 k��1xk�
k wynosi:
�
N
k
praktycznej realizacji
kompasu
wymaga
jednak
�N
N�
� 22 � ... �
praktycznej
realizacji
kompasu
krót
x
�
migotanie
xk �N–1
xNxk��k1Nx���k �2xNk��z1...
�2 x�xkostatnich
xxk�...1 � xpomiapomiarów
wynosi:
działywania
znajdujących
się
w pobli- �rednia
wyników
1kx�
k�...
�N1���
k �poprzednich
N�
�N
k �1 � xz
2 �kruchoma
k N osta
wyja�nienia.
Jak
wiadomo
wyja�nienia.
wiadomo
�rednia
xkwać
�Jak
N
xk N��ruchoma
N Taki
xk �
sposós
granicy
N
żu obiektów
ferromagnetycznych
Okazuje
jednak,
że średnią
N liczenia
pomiarów
wynosi: pomiarów
�rednie
xk �oraz
xrów.
xNsię
�Taki
...Taki
�liczenia
� xk �redniej
Do
elimin
N �1 wynosi:
k �Taki
Nsposób
�Taki
2 �sposób
k �sposób
1liczenia
do
chwili
sposób
liczenia
�red
jest
jedn
�redniej
jest
Taki
sposób
jj
x... ��x x � x � xk �ruchomą
wskutek występowania
można
obliczaćliczenia
w sposób �redniej
wy-�rednie
x
�x
�dodatkowych
N � 2 � ... � xk �do
1 � xkchwili obliczania
u�rednian
xk � k � N �1 k � N �2 kxk �k �1k � N �k1 do
przechowyw
N
x
w
pami
�redniej
chwili
obliczania
x
w
�redniej
do
chwili
obliczania
xp
�redniej
do
chwili
obliczania
pól magnetycznych z innych
źródeł magający
mniejszego
zużycia
�red
chwili
obliczania
k
k
N
N do znacznie
praktyczn
przechowywa� N-1 poprzednich
jednak,
�e
przechowywa�
N-1
poprzednich
wyników
po
przechowywa�
N-1
poprzednich
wyników
Taki
sposób
liczenia
�redniej
jest
je
(pracujących
w
pobliżu
urządzeń
elekpamięci.
Wystarczy
przekształcić
wzór
przechowywa�
N-1
poprzednich
wy
Taki sposób liczenia
jest jednak
k�opotliwy,
poniewa�
Taki �redniej
sposób liczenia
�redniej
jest
jednak
k�opotlm
wyja�nien
jednak,
�e
�redni�
ruchom�
przechowywa�
N-1
poprzedn
znacznie
m
jednak,
�e
�redni�
ruchom�
mo�na
oblicz
jednak,
�e �redni�
ruchom�
mo�na
obl
jednak,
�e
�redni�
ruchom�
trycznych,
przewodów,
przez
które
na
ruchomą
w
pokaxśrednią
danych
�redniej
do chwili
obliczania
xksposób
wnale�y
pami�ci
danych
�redniej
do chwili
chwili
obliczania
k w pami�ci
pomiarów
znacznie
mniejszego
zu�ycia
�redniej
x
wnamo�n
pa
do
obliczania
wzór
�r
k
pami�ci.
Wy
znacznie
mniejszego
zu�ycia
jednak,
�e
�redni�
ruchom
pami�ci.
znacznie
mniejszego
zu�ycia
pam
znacznie
mniejszego
zu�ycia
przepływa
prąd, itp.). N-1
Oddziaływania
poniżej,
aby
przekonać
się,
że x w Ok
przechowywa�
poprzednichzany
wyników
pomiarów.
Okazuje
si�
przechowywa�
N-1
poprzednich
wyników
pomiarów.
wzór
na
�redni�
ruchom�
k � Npok
�sp
1�
na
�redni�
ruchom�
w
sposób
wzór
na
�redni�
ruchom�
w
sposób
przekona�
wzór
na w
�redni�
ruchom�
sposó
przechowywa�
N-1
poprzednich
wyników
xk ww�pokaza
znacznie
mniejszego
zu�yc
tego typu
mogą �e
mieć�redni�
charakter
stały,�e wzór
obliczenie
nowej
wartości
średniej
jednak,
ruchom�
mo�na
oblicza�
sposób
wymagaj�cy
jednak,
�redni�
ruchom�
mo�na
oblicza�
sposó
przekona�
si�,
�e
obliczenie
przekona�
si�,
�e
obliczenie
nowej
wart
przekona�
si�,
�e
obliczenie
nowej
przekona�
si�,
obliczenie
now
przechowyw
pami�ci.
Wystarczy
przekszta�ci�
znacznie
mniejszego
zu�ycia
np. wpływ
karoserii
pojazdu,
w
któ- mniejszego
przechowywania
w�e
pamięci
je- obli
pami�ci.
Wystarczy
pr
znacznie
zu�ycia
jednak,
�ewymaga
�redni�
ruchom�
mo�na
wzór
na
�redni�
ruchom�
w
Taki
spos
przechowywania
w
pami�ci
jed
jedynie
poprze
przechowywania
w
pami�ci
jedynie
pop
przechowywania
w
pami�ci
przechowywania
w aby
pami�ci
jedyni
�redni� ruchom�
sposób
pokazany
poni�ej,
xk �1..
�redn
wzór
na w
�redni�
w wartości
sposób średniej
pokazany
poni�ej
rym nawzór
stałenazamontowano
kompas
dynie ruchom�
poprzedniej
pami�ci.
znacznie
mniejszego
zu�ycia
do
chwili
przekona�
si�,
�e
oblicze
xk.�1 ta
.następnie
�rednia
ta
jest
nast�pn
xkŚrednia
.xk�e
�rednia
jest
nast�pnie
aktualiz
�rednia
ta
jest
nast�pnie
aktu
xwarto�ci
�rednia
taaktualizowajest
nast�pnie
xkwykonany
wymaga
przekona�np.
si�,
�e
obliczenie
�redniej
�1nowej
�1 .obliczenie
lub przejściowy,
zaburzenia
pola si�,
ta
przekona�
nowej
warto�ci
�redn
k �1jest
p
wzór
na jedynie
�redni�
ruchom�
w
sposób
poka
przechowy
wykonany
pomiar
x
.
x
.
wykonany
pomiar
x
.
pomiar
spowodowane
przez przejeżdżające
na wykonany
owostatnio
wykonany
pomiar
.
przechowywania
w przechowywania
pami�ci
poprzedniej
warto�ci
�redniej
pami�ci
jedynie
wart
xk .w k pami�ci
wykonany
pomiar
przechowywania
k
k poprzedniej
xk � N �1 � �
x
xxkjednak,
w pobliżu
przekona�
�e
obliczenie
xk �1samochody.
. �rednia Wpływ
ta
jest
nast�pnie
xk �1 .stałych
�redniasi�,
ta
aktualizowana
o wa
os
xkaktualizowana
�
...�Nx1��kostatnio
x�xk�k�...21ta
xk ��nowej
� ...
xk�k��1...
x�xk�k�o
x��1k � xk nas
�
� Njest
�1x�
k��1nast�pnie
Nx��
2xN
k �x
N.
NN
��
2�1
k�rednia
�
2� N
1��kznacznie
x
jest
x
�
�
x
�
x
�
�
x
�
�
k
�
1
k
k
k k
zniekształceń
polapomiar
może być
xk . zredu- pomiar xk .w
wykonany
N
N
wykonany
N
N jedynie
przechowywania
pami�ci
wzórpopr
�
xk �na
N
kowany poprzez
zastosowanie
spewykonany
�x�2�k x��xkN�...
x
�kx�kxN�xkNk��N�N�x1pomiar
�2xx��1xkkk�...
x
xk�k��NxxNkk�
��k�
xk � N �1 � xk � N �2 � ... � xk �x1k�� Nx�k1 � xk � N��2�� ...
x
��xx�...
x
��.
k ��
N xk k�x
� Nxx
�1N
2xNk�
�kN�
��
�k1...
N��
�N
�
N1�
N
�12�
1
k
przekona�
� kN
�ta
� � �jest
� kk�
�
�
�
�
xkx�kkompasu.
.
�rednia
nast�pnie
aktual
�
�
�
�
�
cjalnychxk procedur
kalibracji
1
N x N N� x N
N
N
N xN N� xN
N N
W najprostszych kompasach wskazuk � N �11
kN� N
� 2 � ...1�przechowy
k �11
k
1
1
�
N
1
1
1
�
x
�
xk � N xk � N �wykonany
xk � N �1 � xxk k��NN�2 �x...
� x� x � Nxkx�1k � xxxkk� N.
1��2 �1...x � �xk �1 1xxk 1� N �xx�1N�1�.1 x�red
1 �
pomiar
�
xkk����
xk �1x�k xk��x1xk��� N
xk ��
x1 k�x k �1 x�
jących np.
Rys. 9. Zasada określania kierunku
� � tylko
� 8 podstawowych
k �1 ��
kx�
�k1 �x
kk �x1k �N
��
� k � N� �k �1k �
11�
1�
�
�
1
1 N
kN N
kN
�1
N NN N N N
N k �N
Nk �N
N
N N Wybieraj�c
N
kierunków, ze Nwzględu na niewielką
w kompasie 8–segmentowym
... warto��
xNNk �N�N1�1 �Wybieraj�c
xk1�Wybieraj�c
�Wybieraj�c
� xkwarto��
� xNwarto��
wykonany
w
tej
zale�no�ci
d
N
w
tej
zale�no�c
N
�
2
�
1
k
N
w
tej
zale
1
1
� xtej
N �x1k � N 1 xk �warto��
1
Wybieraj�c
x � 1pro�N � xk �efektywnym
NN
�1 w
� N �zu
wymaganą
� � xk �1 � xdokładność,
xk xkefektywnym
xk �x1k ��1efektywnym
x�k �1 �efektywnym
�� �
xoknie
xu�redniania,
oknie
u�redniania,
tzn.
tzn.
k �1 � k xk ���
xkkuzys
�
oknie
u�redniania,
t�
k �1 �
k
�
N
�
1
N
efektywnym
oknie
u�redniania
N
N
N
N
N
Nwynikom
N klasycznego
xk oblicza
� N obli
Tab. 2. Napięcia wyjściowe czujników dla różodpowiada�
cedury takie nie musząN być odpowiada�y
wynikom
klasycznego
odpowiada�y
N
wynikom
klasycznego
odpowiada�y
Wybieraj�c
warto��
N w nazale�no�ci
o
tzw.
klasyczn
Wybieraj�c
warto��
Nodpowiada�y
wdecydujemy
tej
decydujemy
nych położeń osi kompasu 8–segmentowego
u�red
implementowane.
Warto
Wybierając
wartość
N wynikom
w...
tej
zależxk �tej
xk �przy
xu�rednianiu
xzale�no�ci
xprzy
xkwyn
�u�redniania,
Nk � pomiarów,
np.
�redni
pomiarów,
�re
przy
u�rednianiu
N �b�d�
pomiarów,
np
N przy
Nu�rednianiu
kprzy
� N �1
1 �u�rednianiu
Nwyniki
�N2 �
k�
1 np.
efektywnym oknie efektywnym
u�redniania,
tzn.
uzyskiwane
oknie
tzn.
uzyskiwane
N
pomiarów,
N
1
1m
x�
�
�
�
�
pomiarów
knas
��
N
tomiast
uwzględniać
problem
ności
decydujemy
o
tzw.
efektywnym
by�
obliczana
nast�puj�co
pomiarów
mo�e
by�
obliczana
nast�puj
pomiarów
mo�e
by�
obliczana
pomiarów
mo�e
�
�
Lp. Kierunek Napięcie czujnika R Napięcie czujnika P odpowiada�y wynikom
x
�
�
x
�
x
�
�
klasycznego
obliczania
�redniej
ruchomej
wynikom
klasycznego
odpowiada�y
obliczana
pomiarów
k�
1 mo�e
kobliczania
�1 by�
k 5�redni
N
N
N
N
1
�
szybkich
przejściowych
za5
1
1
�
oknie
uśredniania,
tzn.
uzyskiwane
5
1
1
�
5N
1 � 0z
� 1�ruchoma
N
przy u�rednianiu przy
N pomiarów,
5
�,2 x k Nx k �1
u�rednianiu
Nx kx�pomiarów,
�rednia
x k �np.
x�np.
x k ��rednia
,2�1xxk�k 0ruchoma
�x k �x1 k�
x k01x�,18k �
,�8k 0xostatnich
5�
1
N
U ≥ U
–U
≤ –U < U
1k �
k �0
kłóceń pola
wyniki
będą
1 mo�e
11,x8kx1k�,x�210kxwynikom
�
5 Wybieraj�c
51
5Nxnast�puj�co:
x k5 �5odpowiadały
� 0k1
,8 x k �1 N
�� 05�,w
21x kxte
by�
obliczana
nast�puj�co:
pomiarów
mo�emagnetycznego
by�
obliczana
pomiarów
k �15 �warto��
k�
xobliczania
� � xk �1Warto
�klasycznego
xWarto
�Warto
�zauwa�y�,
x5ksuma
� suma
xk wspó�cz
5 �e suma
zauwa�y�,
wspó�czynników
objawiający
k
�
1
k
�
1
średniej
ruchoWarto
zauw
zauwa�y�,
�e
wspó�czynnik
2
NE
U ≥ U
–U ≥ U
N
�e
5 �1
1się niestałością
5 �1
1
Njest
Nzawsze
efektywnym
oknie
u�rednia
Warto
zauwa�y�,
�e
suma
wspó
x k wskazań
�
x k �1kompasu.
� x k � 0x,k8Najlepszą
x�k �1 N
� 0,x2k x�1k nowej
� mej
x knowej
�przy
0�redniej
,8nowej
x kN
� 0,2�redniej
xjest
zawsze
równa
1,�red
co
zawsze
równa
1,
nowej
N
pomiarów,
jest
równ
Wybieraj�
��redniej
1uśrednianiu
k
5
5 Wybieraj�c
3
E
–U
≤ U < U
–U ≥ U
5
5 warto��
�redniej
jest
zawsze
w
tej
zale�no�ci
rozumie�
wnowej
taki
sposób,
tyle
samo
„z
w Ntaki
sposób,
�e
tyle
samo
odpowiada�y
wynikom
rozumie�
wobu
taki
sposób,
�eklasy
tyle
rozumie�
wr
efektywny
metodą
pozbycia
się
tego
np.rozumie�
średnia
ruchoma
zsk�adnikach
5 �e
ostatnich
Warto
zauwa�y�,
�e
suma
wspó�czynników
przy
Warto
zauwa�y�,
�e suma
wspó�czynników
przy
obu
st
rozumie�
w
taki
sposób,
�e
�redniej,
ile
nowej
informacji
wprowadz
�redniej,
ile
nowej
informacji
wprow
�redniej,
ile
nowej
informacji
4
SE
U < –U
–U ≥ U
�redniej,
odpowiada
problemu
jest efektywnym
uśrednianie
oknie
u�redniania,
tzn.
uz
pomiarów
może
być
obliczana
przy
u�rednianiu
N
pomiar
�redniej
jest
zawsze
równa
1, co
mo�na
intuicyjnie
nowej
�redniej
jest
zawsze
równa
conastęmo�na
intu
nowej
ostatniego
pomiaru.
�redniej,
ile1,nowej
informac
ostatniego
pomiaru.
ostatniego
pomiaru.
ostatniego
przy
u�re
wynikóww pomiarów
napięć�e
pująco:
rozumie�
takiodpowiada�y
sposób,
tyle
samo
„zapominamy”
ze
starej
rozumie�
w U�rednianie
taki
sposób,
�e
tyle
samo
„zapominamy”
5
S
U < –U
–U
≤ –U < U
wynikom
klasycznego
oblic
pomiarów
mo�e
by�U�redniani
oblicza
danych
pomiarowych,
oprócz
U�rednianie
danych
pomiarowych,
opró
ostatniego
pomiaru.
U�rednianie
danych
pomiarów
�redniej,
nowej
informacji
wprowadzamy
do niej
z pomiarowych,
z czujnikówile
magnetorezystan�redniej,
ile
nowej
informacji
do nie
redukcji
zak�óce�,
a wprowadzamy
przez
to
zwi�kszen
redukcji
zak�óce�,
a przez
to �red
zwi�ks
przy
u�rednianiu
N
pomiarów,
np.
U�rednianie
danych
pomiarowy
redukcji
zak�óce�,
a
przez
to
z
6
SW
U < –U
–U < –U
5
1
1
�
redukcji
ostatniego
pomiaru.
5 �1 z
ostatniego kompasu,
pomiaru. ma te� istotn� wad� polegaj�c�
cyjnych.
kompasu,
ma
istotn�
wad�
xby�
�redukcji
xte�
�
�nast�puj�
0kompasu,
,8axxk na
�pol
0po
��polegaj
x,m2
kompasu,
ma
te� xistotn�
wad�
zak�óce�,
przez
kt
k
k
�
1
k
k
1
obliczana
pomiarów
mo�e
U�rednianie
danych
pomiarowych,
oprócz
zalety
polegaj�cej
U�rednianie
danych
pomiarowych,
oprócz
zalety
Trzeba tutaj zauważyć, że reakcji
7
W
–U
≤ U < U
–U < –U
5wad�
kierunku.
War
kompasu
na
zmian�
kierunku.
reakcji
kompasu
na5te�
zmian�
5
kieru
reakcji
kompasu
na
zmian�
kompasu,
ma
istotn�
reakcji
ko
redukcji
a przez
to zwi�kszeniu
sta�o�ci
wskaza�
redukcji
a wprzez
to
zwi�kszeniu
sta�o�c
Warto
zau
niestałośćzak�óce�,
wskazań
kompa5 � 1 zak�óce�,
1 Warto
dobierana
celu
uzyskania
kompromisu
pw
dobierana
wzauwa�y�,
celu
uzyskania
kompromis
dobierana
wkompasu
celu
uzyskania
komp
ki
reakcji
na
zmian�
8
NW
U ≥ U
–U < –U
�e
suma
kompasu, ma te�x istotn�
polegaj�c�
na
zwi�kszeniu
czasu
dobierana
kompasu,wad�
te�
wad�
polegaj�c�
na
zwi�ks
xma
xistotn�
�
0
,
8
x
�
0
,
2
x
�re
nowej
su może być spowodowana
szybko�ci�
reakcji
kompasu.
k �
k �wskaza�
1 � wskaza�
k i
k
�
1
k
i
szybko�ci�
reakcji
kompasu
i
szybko�ci�
reakcji
ko
wskaza�
dobierana
w
celu
uzyskania
kierunku.
Warto��
N powinna
by�
reakcji kompasu na
zmian�
kierunku.
Warto��
N pow
reakcji
na zmian�
ik
wskaza�
5(np.kompasu
5 nowej
�redniej
jest
zawsz
rozumie�
Uzyskali�my
ju�
kompletn�
wiedz�
teoret
Uzyskali�my
ju�
wiedz�
teo
również jego niewielką
Uzyskali�my
ju�
kompletn�
wiedz
wskaza�
i kompletn�
szybko�ci�
reakcji
dobierana w celu dobierana
uzyskania wkompromisu
pomi�dzy
sta�o�ci�
celu
uzyskania
kompromisu
pomi�dzy
st
Uzyskali�m
Warto
zauwa�y�,
�e
suma
wspó�czynnikó
ko�
zbudowanie
prawdziwego,
dzia�aj�cego
�redniej,
zbudowanie
prawdziwego,
dzia�aj�cego
rozumie�
wże
taki
sposób,
zbudowanie
prawdziwego,
dzia�aj
10–bitową)
rozdzielczością
przetworniWarto
zauważyć,
suma
współwynika z rys. 8, kiedy oś kompaUzyskali�my
ju�
kompletn�
wi
i szybko�ci�
reakcji
kompasu.
wskaza�
i szybko�ci�
reakcji
kompasu.
wskaza�
zbudowanie
powiedziane
wcze�niej,
artyku�
na
ten
t
powiedziane
wcze�niej,
artyku�
na
ostatnieg
powiedziane
wcze�niej,
artyku�
jakie
są
dostępne
w
popuczynników
przy
obu
składnikach
nosu jest skierowana na wschód, oś ków A/C,
�redniej
jest
zawsze
równa
1,
cte
�redniej,
ile
nowej
infor
Uzyskali�my ju�nowej
kompletn�
wiedz�
teoretyczn�
pozwalaj�c�
na
zbudowanie
prawdziwego,
dzia
Uzyskali�my
ju�
kompletn�
wiedz�
teoretyczn�
pozw
powiedzian
dziale
„Projekty”.
dziale
„Projekty”.
U�rednian
dziale
„Projekty”.
mikrokontrolerach.
Rozdzielwej
średniej
jest
zawsze
równa
1,
co
czułości tego czujnika jest zwróco- larnychzbudowanie
kompasu.
Jak
ju�
by�o
prawdziwego,
dzia�aj�cego
powiedziane
wcze�niej,
artyk
kompasu.
Jak
zbudowanie Piotr
dzia�aj�cego
rozumie�
wprawdziwego,
taki
sposób,
�e
tyle
samo
dziale
„Pr
ostatniego
pomiaru.
Kaniewski
Piotr
Kaniewski
Piotr
Kaniewski
redukcji
czość ta
pogorszy sięwcze�niej,
do powiedziane
7–bitowej
można
intuicyjnie
rozumieć
taki
na przeciwnie do zwrotu składowej
powiedziane
artyku�
na ten
temat
zamieszczamy
w zamie
wcze�niej,
artyku�
na ten wtemat
dziale
„Projekty”.
Piotr
Kani
�redniej,
ile
nowej
informacji
wprowa
U�rednianie
danychkompasu,
pomiar
dziale
„Projekty”.
200–krotnego
wzmocnienia
sposób,
żePiotr
tyle samo
„zapominamy”
poziomej wektora ziemskiego pola w wyniku
dziale „Projekty”.
Kaniewski
reakcji
k
Piotr
Kaniewskiostatniego
Piotr
Kaniewski
redukcji
a prze
z przetworników
za pomocą
ze pomiaru.
starej
średniej, ilezak�óce�,
nowej informamagnetycznego, a więc wartość na- sygnałów
dobierana
mikro- cji wprowadzamy
doma
niej te�
z ostatniego
pięcia na jego wyjściu jest mniej- wewnętrznych wzmacniaczy
U�rednianie
danych
pomiarowych,
opróc
kompasu,
istotn�
wskaza� iw
kontrolera. W tej sytuacji redukcji
błędy kwan- zak�óce�,
pomiaru.
sza od zera.
a kompasu
przez tona
zwi�ksz
reakcji
zmian�
Uzyskali�
tyzacji mogą się objawiać „skakaniem”
Uśrednianie danych pomiarowych,
Z rys. 9 wynika, że przy podejzbudowani
kompasu,
ma
te�
istotn�
wad�
polegaj�
dobierana
w
celu
uzyskani
oprócz zalety polegającej na redukcji
mowaniu decyzji o azymucie, na- wyników pomiarów i przypadkowym
powiedzia
kierunku.
W
wskaza�
szybko�ci�
reak
szczególnie kompasu
zakłóceń,
ana
przezzmian�
toizwiększeniu
stałoleży sprawdzać, w którym z trzech migotaniem diod LED, reakcji
dziale „P
na graniści
kompasu, maju�
teżkompromisu
istotną
możliwych przedziałów wartości przy ustawieniach kompasu
dobierana
w wskazań
celu
uzyskania
Uzyskali�my
kompletn�
Piotr Kan
cy segmentów azymutu. wskaza� i wadę
polegającą na reakcji
zwiększeniu
czasu
–Umax;–Uprog),
–Uprog;Uprog),
szybko�ci�
kompasu.d
zbudowanie
prawdziwego,
Do eliminacjidiod
„skakania”
wynireakcji kompasu
na
zmianę kierunku.kompas
czy
Uprog
migotaniem
LED,
szczególnie
przy
ustawieniach
U prog
;U;Umax
mie�ci si�
max
Uzyskali�my
ju�
kompletn�
wiedz�
teor
prog ; U prog � , czy
powiedziane
wcze�niej,
ar
ków
pomiarów
można
zastosować
Wartość
N
powinna
dobierana
granicy segmentów
azymutu. prawdziwego, być
zbudowanie
dzia�aj�cego
dziale
„Projekty”.
ów. Warto��
progowa
U
,
przy
której
ich uśrednianie. Algorytm obliczania w celu uzyskania kompromisu pomięprog z czujmieści się napięcie każdego
Do eliminacji „skakania” wyników pomiarów mo�na zastosowa
średniej zastosowany w praktycznej
re- dzy wcze�niej,
powiedziane
artyku�
na ten
stałością
wskazań
i szybkością reników.
progowa
Uprog, przy wynosi
pe�nego
na Wartość
8 równych
sektorów
Piotr
Kaniewski
u�rednianie.
Algorytm
obliczania
�redniej
zastosowany w
alizacji
kompasu
wymaga
jednak
krótakcji
kompasu.
której
uzyskuje
się
podział
kąta
peło Umax. Zestawienie warto�ci napi��
dziale kompasu
„Projekty”.
praktycznej
wymaga już
jednak
krótkiego
wyjaśnienia. realizacji
Jak wiadomo średUzyskaliśmy
kompletną
wiedzę
na 8 równych sektorów
wy- kiego
P dlanego
poszczególnych
kierunków
Piotr
Kaniewski
migotaniem
diod
LED,
szczególnie
wyja�nienia.
Jak
wiadomo
�rednia
ruchoma
z
N
ostatnich
nosi 38,3% napięcia maksymalnego nia ruchoma z N ostatnich pomiarów teoretyczną pozwalającą na zbudowa-przy us
warto�ci � U max ; � U prog � , � U prog ; U prog � , czy U prog ;U max mie�ci si�
� , �,�czy
�, maxczy mie�ci
U prog ;Usi�
mie�ci
U prog ; U
U ;prog
warto�ci
U prog
� U; �
U prog
; � U prog � ,� U max
warto�ci � U
max
prog ;U
prog
napi�cie max
ka�dego
z
czujników.
Warto��
progowa
U
prog, przy której
napi�cie
ka�dego
czujników.
Uprog
, przy
napi�cie
ka�dego
z czujników.
Warto��
progowa
Uprogprogowa
,sektorów
przy której
uzyskuje
si� podzia�
k�taz pe�nego
na
8Warto��
równych
wynosi
uzyskuje
podzia�
k�ta
pe�nego
nasektorów
8 równych
sektorów
uzyskuje si�
podzia�si�
k�ta
pe�nego
na 8
równych
wynosi
38,3%
napi�cia
maksymalnego
U
.
Zestawienie
warto�ci
napi��
max
38,3%
napi�cia maksymalnego
U . Zestawienie
warto�ci n
38,3% napi�cia
maksymalnego
U . Zestawienie
warto�ci
napi��
max
max
czujników
R
i
P
dla
poszczególnych
kierunków
na
wyj�ciach
naczujników
wyj�ciach
R i P dla poszczególnych
na wyj�ciach
i P dla poszczególnych
kierunków kierunk
zestawiono
w tab. 2.Rczujników
zestawiono
zestawiono w
tab. 2. w tab. 2.
Tab. 2. Napi�cia wyj�ciowe czujników dla ró�nych po�o�e� osi
Tab.
2.
Napi�ciaczujników
wyj�ciowedla
czujników
ró�nych
Tab.kompasu
2. Napi�cia
wyj�ciowe
ró�nychdla
po�o�e�
osipo�o�e
8-segmentowego
kompasu 8-segmentowego
kompasu 8-segmentowego
Napi�cie
Napi�cie
Lp. Kierunek
Napi�cie
Napi�cie
czujnikaNapi�cie
R
czujnikaNapi�cie
P
Lp. Kierunek
Lp. Kierunek
R
czujnika R czujnika
czujnika
P czujnika P
-U
prog � -Up <
N
1
Ur � Uprog
-U
�
-U
< prog � -Up <
p -U
U
prog
1 UrN � Uprog
N
1
Ur � Uprog prog
Uprog
Uprog-Up � Uprog
2
NE
Ur � Uprog
2 UrNE
2
NE
Ur � Uprog
� Uprog
-Up � Uprog -Up � Uprog
E
3
-U
-U
prog � Ur < Uprog
p � Uprog
3 4 E SE 3 -UEprog
Urp <-U
-Up � Uprog
Uprog
� UpUprog
r <-U
prog � -U
prog
U �< U-U
� Uprog
r
prog
4 UrSE
4
SE
< -Uprog Ur < -Uprog
-Up � Uprog -Up � Uprog
-U
prog � -Up <
S
5
Ur < -Uprog
-U
� -U -U
< prog � -Up <
prog
p
U
prog
5 UrS < -Uprog Ur < -Uprog
S
5
Uprog-Up < -UU
prog
6
SW
Ur < -Uprog
prog
6 UrSW
6
SW
< -Uprog Ur < -Uprog
-Up < -Uprog -Up < -Uprog
W
7
-U
<
-U
-U
p
prog
prog � Ur < Uprog
7 8 W NW 7 -UWprog � Ur <-UUprog
< Up-U
Urp <-U
p < -Uprog
prog
prog � -U
<prog
-U-U
U
�
U
prog
r
prog
8 UrNW
8
NW
-Up < -Uprog -Up < -Uprog
Ur � Uprog
� Uprog
Wyznaczaj�c azymut musimy zdawa� sobie spraw�, �e ziemskie
Wyznaczaj�c
azymut
musimy
zdawa�
spraw�, �e ziems
Wyznaczaj�c
azymut musimy
zdawa�
sobie
spraw�,
�e odkszta�cone
ziemskie
pole magnetyczne
w otoczeniu
kompasu
mo�esobie
by�
w
pole magnetyczne
otoczeniu
kompasu
mo�e by� odkszta�c
pole magnetyczne
w otoczeniuwkompasu
mo�e
by� odkszta�cone
w
wyniku
oddzia�ywania
znajduj�cych
si�
w
pobli�u
obiektów
wyniku oddzia�ywania znajduj�cych si� w pobli�u obiektó
wyniku
oddzia�ywania
znajduj�cych
si�
w
pobli�u
obiektów
ferromagnetycznych
oraz
wskutek
wyst�powania
dodatkowych
pól
ferromagnetycznych
oraz
wskutek wyst�powania
ferromagnetycznych
wskutek
wyst�powania
dodatkowych
pól
magnetycznych
z oraz
innych
�róde�
(pracuj�cych
w pobli�u dodatkowyc
urz�dze�
magnetycznych
z innych
�róde�
w pobli�u
magnetycznych
z innych
�róde�
(pracuj�cych
w pobli�upr�d,
urz�dze�
elektrycznych,
przewodów,
przez
które (pracuj�cych
przep�ywa
itp.). ur
elektrycznych,
przewodów,
którepr�d,
przep�ywa
pr�d, i
elektrycznych,
przewodów, przez
któreprzez
przep�ywa
itp.).
Oddzia�ywania
tego
typu
mog�
mie�
charakter
sta�y,
np.
wp�yw
Oddzia�ywania
tegomie�
typu
mog� mie�
charakter
sta�y,
Oddzia�ywania
tego typuw mog�
sta�y,
np.
wp�yw
karoserii
pojazdu,
którym
na charakter
sta�e
zamontowano
kompas
lubnp.
karoserii pojazdu, w którym na sta�e zamontowano kompas
karoserii
pojazdu,
w
którym
na
sta�e
zamontowano
kompas
lub
np.
zaburzenia
pola
spowodowane
przez
przej�ciowy,
przej�ciowy,
np. pola
zaburzenia
pola
przez
przej�ciowy,
np. zaburzenia
spowodowane
przez
przeje�d�aj�ce
w pobli�u
samochody.
Wp�ywspowodowane
sta�ych
przeje�d�aj�ce
w by�
pobli�u
samochody.
Wp�ywzastosowanie
sta�ych
przeje�d�aj�ce
w pobli�u
samochody.
Wp�yw
sta�ych
zniekszta�ce�
pola mo�e
zredukowany
poprzez
zniekszta�ce�
pola
mo�e by� zredukowany
poprzez zastoso
zniekszta�ce�
pola mo�e by�
zredukowany
poprzez zastosowanie
specjalnych
procedur
kalibracji
kompasu.
W
najprostszych
procedur kompasu.
kalibracji
kompasu. W najprostszyc
specjalnychspecjalnych
procedur kalibracji
W najprostszych
kompasach
wskazuj�cych
np.
tylko
8
podstawowych
kierunków,
ze
kompasach
wskazuj�cych
np.
tylko 8 procedury
podstawowych
kierunk
kompasach
np.
tylko 8dok�adno��,
podstawowych
kierunków,
ze
wzgl�duwskazuj�cych
na niewielk�
wymagan�
takie
nie
wzgl�du
nawymagan�
niewielk�
wymagan�
dok�adno��,
procedury
wzgl�du
niewielk�
dok�adno��,
procedury
takie
nie tak
musz�naby�
implementowane.
Warto
natomiast
uwzgl�dnia�
problem
musz� by� implementowane.
Wartouwzgl�dnia�
natomiast uwzgl�dnia�
p
musz� by� implementowane.
Warto natomiast
problem
szybkich
przej�ciowych
zak�óce�
pola
magnetycznego
objawiaj�cy
szybkich przej�ciowych
zak�óce�
pola metod�
magnetycznego
szybkich
przej�ciowych
zak�óce�
pola
magnetycznego
objawiaj�cy
si� niesta�o�ci�
wskaza�
kompasu.
Najlepsz�
pozbyciaobja
niesta�o�ci� wskaza� kompasu. Najlepsz� metod� pozb
si� si�
niesta�o�ci�
wskaza�
kompasu.
Najlepsz�
metod�
pozbycia
tegosi�
problemu
jest
u�rednianie
wyników
pomiarów
napi��
z
tego
problemu
jest u�rednianie
wyników
pomiarów
nap
si�magnetorezystancyjnych.
tego problemu
jest
u�rednianie
wyników pomiarów
napi��
z
si� czujników
czujników
magnetorezystancyjnych.
czujników
Trzeba magnetorezystancyjnych.
tutaj
zauwa�y�,
�e niesta�o�� wskaza� kompasu mo�e by�
Trzeba
tutaj�e
zauwa�y�,
�e wskaza�
niesta�o��
wskaza�
kompasu
mo
Trzeba
tutaj
zauwa�y�,
niesta�o��
kompasu
mo�e
by�
spowodowana
równie�
jego
niewielk�
(np. 10-bitow�)
równie�
jego(np.
niewielk�
(np. 10-bitow�)
spowodowanaspowodowana
równie� jego
niewielk�
10-bitow�)
rozdzielczo�ci�
przetworników
A/C,
jakie
s�
dost�pne
w
rozdzielczo�ci� przetworników A/C, jakie s� dost�pne
przetworników
A/C,
jakie
s�
dost�pne
w
rozdzielczo�ci�
popularnych
mikrokontrolerach.
Rozdzielczo��
ta
pogorszy
si� w
popularnych
mikrokontrolerach.
Rozdzielczo��
ta
pogorsz
popularnych
mikrokontrolerach.
Rozdzielczo��
ta pogorszy
si�
do 7-bitowej
w wyniku
200-krotnego
wzmocnienia
sygna�ów
z
dow7-bitowej
w wyniku
200-krotnego
wzmocnienia
do 7-bitowej
wyniku
200-krotnego
wzmocnienia
sygna�ów z sygna�ów
przetworników
za pomoc�
wewn�trznych
wzmacniaczy
r
prog
r
prog
prog
r
prog
r
prog
r
r
prog
prog
prog
p
prog
p
prog
p
Ur
prog
p
prog
p
prog
p
prog
U max. Zestawienie wartości napięć
na wyjściach czujników R i P dla
czujników
dla ró�nych
poszczególnych
kierunków po�o�e�
zestawiono w tab. 2.
Wyznaczając
azymut musimy zdaNapi�cie
wać sobie sprawę, że ziemskie pole
R
czujnika P
magnetyczne w otoczeniu kompasu
-Uprog
� -Up w<wyniku odmoże być
odkształcone
Uprog
-Up � Uprog
Elektronika Praktyczna 5/2007
< Uprog -Up � Uprog
prog
p
prog
prog
prog
p
prog
r
r
prog
granicy
segmentów azymutu.
nie prawdziwego,
działającego kompaDo eliminacji „skakania” wyników pomiaró
su.
Jak
już
było
powiedziane wczexk � N �1 � xk � N �2 � ... � xk �1 � xu�rednianie.
k
Algorytm obliczania �rednie
xk �
osi
śniej, artykuł na ten temat zamieścipraktycznej realizacji kompasu wymaga je
N
my w EP6/2007
w dziale „Projekty”.
wyja�nienia.
Jak
wiadomo
�rednia ruchoma
Taki
sposób
liczenia
�redniej
jest
jednak
k�opotliwy,
pon
Piotr
Kaniewski
Taki sposób liczenia średniej
pomiarów wynosi:
x Kazubek
w pami�ci danych nale�y
�redniej
do chwili
obliczania
Jakub
jest
jednak kłopotliwy,
ponieważ
x � N �1 � xkk � N �2 � ... � xk �1 � xk
xk � kPiotr
Komur pomiarów. Okazuje si
do
chwili obliczania
przechowywa�
N-1 średniej
poprzednich
wyników
N
w
pamięci danych
należy przechowyjednak,
�e �redni�
ruchom�
w sposób
wymaga
Taki mo�na
sposób oblicza�
liczenia �redniej
jest
jedna
pami�ci.
Wystarczy
przekszta�
znacznie mniejszego zu�ycia
do chwili obliczania �redniej xk w pami�c
wzór na �redni� ruchom�przechowywa�
w sposób pokazany
poni�ej,
aby pom
N-1 poprzednich
wyników
111oblicza
jednak, nowej
�e �redni�
ruchom�
mo�na
xk w
przekona� si�, �e obliczenie
warto�ci
�redniej
znacznie mniejszego zu�ycia pami�ci. Wys
pomiarów wynosi:
wynosi: