Matematyczne techniki zarządzania - 211
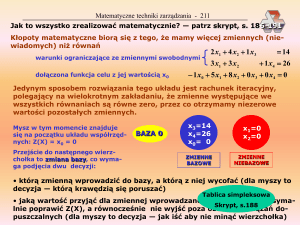
Jak to wszystko zrealizować matematycznie? — patrz skrypt, s. 186-191
Kłopoty matematyczne biorą się z tego, że mamy więcej zmiennych (niewiadomych) niż równań
warunki ograniczające ze zmiennymi swobodnymi
dołączona funkcja celu z jej wartością x0
2 x1 4 x2 1 x3
3 x1 3 x2
14
1 x4 26
1 x0 5 x1 8 x2 0 x3 0 x4 0
Jedynym sposobem rozwiązania tego układu jest rachunek iteracyjny,
polegający na wielokrotnym zakładaniu, że zmienne występujące we
wszystkich równaniach są równe zero, przez co otrzymamy niezerowe
wartości pozostałych zmiennych.
Mysz w tym momencie znajduje
się na początku układu współrzędnych: Z(X) = x0 = 0
Przejście do następnego wierzchołka to zmiana bazy, co wymaga podjęcia dwu decyzji:
BAZA 0
x3=14
x4=26
x0= 0
x1=0
x2=0
ZMIENNE
BAZOWE
ZMIENNE
NIEBAZOWE
• którą zmienną wprowadzić do bazy, a którą z niej wycofać (dla myszy to
decyzja — którą krawędzią się poruszać)
Tablica simpleksowa
• jaką wartość przyjąć dla zmiennej wprowadzanej do bazy, aby maksymaSkrypt, s.188
lnie poprawić Z(X), a równocześnie nie wyjść poza obszar rozwiązań dopuszczalnych (dla myszy to decyzja — jak iść aby nie minąć wierzchołka)
Matematyczne techniki zarządzania - 212
Zmiana bazy polega na wymianie tylko jednej zmiennej, czyli na zmianie na
wierzchołku kierunku marszu ku rozwiązaniu optymalnemu.
Po wyznaczeniu tych
decyzji, układ równań
BAZA 0
BAZA 1
BAZA 2
BAZA 3
przekształca się (przez
ich mnożenie i dodawanie) tak, aby zmienRachunek iteracyjny kończy się w momencie, gdy z
ne bazowe występowadołączonej funkcji celu wynika, że nie ma już możły tylko w jednym równaniu.
liwości poprawy wartości funkcji celu.
Baza zdegenerowana: baza, w której pojawiło się przypadkowe zero
ZAGADNIENIE DUALNE SYMETRYCZNE
Zagadnienie pierwotne
Z ( X ) c j x j max
• nowa zmienna dualna yi
• odwrócenie kierunku optymalizacji
aij x j bi
• zamiana cj oraz bi miejscami
xj 0
• zmiana kierunku nierówności
• transponowanie macierzy A
Zagadnienie dualne
Z (Y ) bi yi min
a ji yi c j
yi 0
max Z ( X ) min Z (Y )
Zagadnienie dualne (zagadnienia dualnego) = zagadnienie pierwotne
Rozwiązując jedno z nich rozwiązujemy równocześnie drugie, czasem
wygodniej jest rozwiązywać dualne zamiast pierwotnego
Matematyczne techniki zarządzania - 213
Ekonomiczna interpretacja zmiennych dualnych yi
Są to ceny dualne środków produkcji określające jaki dodatkowy zysk może przynieść firmie dodatkowa jednostka i-tego środka.
W każdym warunku ograniczającym występuje nierówność , co oznacza,
że dany środek (surowiec, robocizna, czas pracy maszyn) może być przy
rozwiązaniu optymalnym albo wykorzystany całkowicie (=), albo tylko
częściowo (<).
Stopień wykorzystania i-tego środka produkcji poznajemy po wartości
zmiennej swobodnej (plansza 207).
1. Środek produkcji wyczerpany w rozwiązaniu optymalnym
3 x1 6 x2 x3 25
=0
Zmienna dualna związana z tym środkiem
ma wartość , gdyż sprowadzenie nowej
jednostki tego środka pozwoli zwiększyć
produkcję, co da dodatkowy zysk równy yi
2. Środek produkcji niewyczerpany w rozwiązaniu optymalnym
6 x1 2 x2 x4 42
=8
Zmienna dualna związana z tym środkiem
ma wartość 0, gdyż tego środka jest już teraz w nadmiarze i sprowadzenie nowej jego jednostki nic w firmie nie zmieni — ani
wielkości produkcji, ani zysku
A jaka będzie interpretacja zmiennej dualnej dla mieszanki?
Matematyczne techniki zarządzania - 214
ANALIZA WRAŻLIWOŚCI W PROGRAMOWANIU LINIOWYM
Co będzie,
jeśli...
Bada się reakcję X
(rozwiązania optymalnego)
na zmianę A, B, C (założeń)
PROGRAMOWANIE
PARAMETRYCZNE
1. Skutki zmiany funkcji celu (macierzy C)
Funkcja celu
3 x1 5 x2 max
C [3, 5]
• xj nie ma w ostatniej bazie w rozwiązaniu optymalnym, czyli xj = 0
WYRÓB j-TY NIE JEST PRODUKOWANY W ROZWIĄZANIU OPTYMALNYM — DLACZEGO?
PONIEWAŻ JEGO RENTOWNOŚĆ JEST ZA NISKA W PORÓWNANIU Z INNYMI
Wnioski: — obniżenie zysku jednostkowego cj nie zmieni rozwiązania optymalnego,
gdyż j-ty wyrób w dalszym ciągu będzie nierentowny
— zwiększenie zysku jednostkowego może zmienić rozwiązanie optymalne,
gdyż j-ty wyrób może (jeśli przekroczymy pewną wartość cj) stać się bardziej opłacalny niż inne wyroby
Pytanie: o ile najwięcej (pj) może wzrosnąć cj, aby rozwiązanie optymalne nie
uległo zmianie?
Przykład odpowiedzi: p2<0,4286
Interpretacja: dopóki c2<5,4286, wyrób 2 nie powinien wchodzić do produkcji
Matematyczne techniki zarządzania - 215
• zmienna xj znajduje się w ostatniej bazie, czyli xj>0
WYRÓB j-TY JEST PRODUKOWANY W ROZWIĄZANIU OPTYMALNYM — DLACZEGO?
PONIEWAŻ JEGO RENTOWNOŚĆ JEST WYŻSZA W PORÓWNANIU Z INNYMI
Wnioski: — obniżenie zysku jednostkowego cj może zmienić rozwiązanie optymalne,
gdyż j-ty wyrób może stać się nierentowny (po zejściu poniżej pewnej
granicy)
— zwiększenie zysku jednostkowego może zmienić rozwiązanie optymalne,
gdyż j-ty wyrób może (jeśli przekroczymy pewną wartość cj) stać się
jeszcze bardziej opłacalny niż dotychczas
Pytanie: o ile (pj) może zmaleć lub wzrosnąć cj, aby rozwiązanie optymalne
nie uległo zmianie?
Przykład odpowiedzi: —0,6<p1<2,2
Interpretacja: dopóki 2,4<c1<5,2, wyrób 1 powinien być produkowany w
ilości x1 wyznaczonej przez rozwiązanie optymalne
2. Skutki zmiany wektora ograniczeń (macierzy B)
3 x1 6 x2 48
Każda zmiana (w pewnych granicach) ilości środków produkcji
zmienia wartość funkcji celu
Analizę wrażliwości na B przeprowadza się z uwzględnieniem:
— zmiany struktury asortymentowej wyrobów (które wyroby się produkuje)
oraz osobno szczegółów produkcji (ile się produkuje)
— ceny dualnej środków: czy dany środek jest wyczerpany w rozwiązaniu
optymalnym, czy nie wyczerpany
Matematyczne techniki zarządzania - 216
3. Skutki zmiany współczynników technologicznych (macierzy A)
• wprowadzenie nowego wyrobu
3 x1 6 x2 48
4 x1 1 x2 25
x3
3 x1 6 x2 3 x3 48
4 x1 1 x2 5 x3 25
Pytanie: ile musi wynosić c3, aby rozwiązanie optymalne uległo zmianie, czyli
aby wyrób trzeci wszedł do produkcji?
Przykład odpowiedzi: jeśli c3>14, wyrób trzeci wejdzie do produkcji
• zmiana technologii produkcji
Zagadnienie skomplikowane
a12 6 a12 4
POMIJAMY
DUŻE PROFESJONALNE PROGRAMY KOMPUTEROWE UMOŻLIWIAJĄ ANALIZOWANIE
WRAŻLIWOŚCI ROZWIĄZANIA OPTYMALNEGO NA RÓWNOCZESNĄ ZMIANĘ KILKU
CZYNNIKÓW
WIĘCEJ INFORMACJI O
ANALIZIE WRAŻLIWOŚCI W
SKRYPCIE (ROZDZIAŁ 7)
WYDRUK Z PROGRAMU QSB+
ZAWIERA DUŻO ELEMENTÓW
ANALIZY WRAŻLIWOŚCI
Matematyczne techniki zarządzania - 217Przy interpretacji wydruku
WYDRUK Z PROGRAMU QSB+ CZĘŚĆ PIERWSZA
Numer zmiennej
decyzyjnej
Rozwiązanie (optymalne wartości
zmiennych decyzyjnych)
numer wyrobu
ilości produkowanych wyrobów
numer składnika
mieszanki
ilości użytych składników
Number
1
2
obowiązuje podwójny język:
• matematyczny
• ekonomiczny (menedżerski)
Nazwa projektu
Summarized Report for......................
Variable
Solution
Opportunity Objective
Minimum
Cost
Coefficient Obj. Coeff.
X1
+2,0
0
+30,0
0
X2
+6,0
0
+50,0
+20,0
Max (Min) Obj = .... Iteration = .... Elapsed CPU Second = ......
Maximum
Obj. Coeff.
+75
+Infinity
Optymalna wartość
funkcji celu
maksymalny zysk
producenta
minimalny koszt
mieszanki
Koszty alternatywne
(względne)
O ile trzeba zmienić
współczynnik funkcji
celu, aby wyrób (składnik) wszedł do rozwiązania optymalnego (w
przykładzie = 0, gdyż
ilości są różne od zera)
Liczba iteracji wykonanych przez komputer
Współczynniki
funkcji celu
(macierz C)
Optymalne zakresy
współczynników
funkcji celu
zyski jednostkowe z wyrobów
przedziały zysku
jednostkowego nie
powodujące zmiany
planu produkcji
ceny składników
mieszanki
Czas szukania
optymalnego
rozwiązania
przedziały ceny
składników nie powodujące zmiany
receptury mieszanki
Matematyczne techniki zarządzania - 218Przy interpretacji wydruku
WYDRUK Z PROGRAMU QSB+ CZĘŚĆ DRUGA
Numer ograniczenia (warunku)
numer środka produkcji
numer komponentu mieszanki
Constraint
1
2
3
obowiązuje podwójny język:
• matematyczny
• ekonomiczny (menedżerski)
Ograniczenia (macierz B) z nierównością
ilości posiadanych środków produkcji
najmniejsze dopuszczalne ilości komponentów (normy)
Summarized Report for .......
Status
RHS
Shadow
Slack or
Min RHS
Price
Surplus
( )
Loose
0
+2,0
+2,0
+4,0
( ) +12,0
Tight
15
0
+6,0
( )
Tight
10
0
+12,0
+18,0
Max (Min) Obj = ...... Iteration = ......
Elapsed CPU Second = ......
Sposób spełniania nierówności
z warunków ograniczających
(loose = nierówność silna,
tight = nierówność słaba)
loose = środek produkcji jest
w nadmiarze; tight = środek
produkcji wyczerpany
loose = komponent jest w
nadmiarze; tight = komponentu jest dokładnie według wymagań normy
Ceny dualne
Luz czyli nadmiar
dodatkowy
zysk z dodatkowej jednostki środka
ilość niewyczerpanego środka
produkcji
zmiana kosztu mieszanki po zmniejszeniu normy o jednostkę
ilość komponentu ponad normę
Max RHS
+Infinity
+18
+24
Wartości zakresów
ograniczeń (macierzy
B), w których wartość
optymalna funkcji celu
zmienia się zgodnie z
cenami dualnymi
zakresy dla ilości
środka produkcji
zakresy dla ilości
komponentu mieszanki
Matematyczne techniki zarządzania - 219
ZAST0SOWANIA PROGRAMOWANIA LINIOWEGO
• planowanie produkcji
•ile i czego
ile i jaką metodą
•ile i z czego
•ile i kiedy
JEST TO METODA
UNIWERSALNA
PRAWIE WSZYSTKO
MOŻNA ZAPISAĆ
JAKO MODEL
PROGRAMOWANIA
LINIOWEGO
• optymalizacja strategii rozwoju koncernu
• optymalizacja rozwoju branż gospodarki narodowej
• optymalizacja strategii reklamowej
• optymalizacja przepływów w sieciach
• optymalizacja kontraktacji w rolnictwie
SETKI ZADAŃ
W KSIĄŻCE
WAGNERA
BADANIA
OPERACYJNE
• zagadnienia dowozu i przewozu (autobusy, lotnictwo)
• zagadnienia techniczne: projektowanie, cięcie, rozkrój
• harmonogramy dyżurów, plany zajęć
• teoria gier
UMIEJĘTNOŚĆ INTERPRETACJI WYDRUKU Z
PROGRAMOWANIA LINIOWEGO TO MINIMUM WIEDZY
STUDENTA
Matematyczne techniki zarządzania - 220
KLASYCZNE ZAGADNIENIE TRANSPORTOWE
DOSTAWCY
ODBIORCY
O2
O1
D1
D2
POPYT
c11
c21
x11 c12
x21 c22
b1
x11 x12 x13 a1
x13
x23
a1
a2
b3
Twierdzenia związane z KZT
ZAGADNIENIE MOŻE BYĆ
OTWARTE LUB ZAMKNIĘTE
MODEL
ai b j
ai b j
Zagadnienie otwarte sprowadza się do
zamkniętego przez wprowadzenie fikcyjnego dostawcy lub odbiorcy
x13 x 23 b3
x11 , x12 ,..., x 23 0
x12 c13
x22 c23
1.
x 21 x22 x 23 a2
x12 x 22 b2
O3
b2
Z ( X ) c11 x11 c12 x12 ... c23 x23 min
x11 x 21 b1
PODAŻ
2.
JEŚLI DANE SĄ LICZBAMI CAŁKOWITYMI, TO KZT MA
CO NAJMNIEJ JEDNO ROZWIĄZANIE CAŁKOWITOLICZBOWE
CAŁKOWITOLICZBOWOŚĆ
3.
JEŚLI ISTNIEJĄ DWA ROZWIĄZANIA OPTYMALNE,
MOŻNA TWORZYĆ NOWE JAK PRZY PROGRAMOWANIU
LINIOWYM
Matematyczne techniki zarządzania - 221
ROZWIĄZANIE OPTYMALNE NIE ULEGNIE ZMIANIE, JEŚLI NA
MACIERZY ODLEGŁOŚCI C WYKONAMY:
4.
• mnożenie (dzielenie) całej macierzy przez stałą (zmiana skali liczb)
• dodawanie (odejmowanie) stałej do pojedynczych wierszy i kolumn
(tworzenie klatek zerowych)
UZYSKANE W TEN SPOSÓB NOWE ODLEGŁOŚCI NAZYWAMY PSEUDOODLEGŁOŚCIAMI
METODA KLATEK ZEROWYCH
Przykład 47. Znajdź metodą klatek zerowych optymalny plan rozwozu
konserw rybnych z czterech portów do pięciu miast w głębi kraju. Odległości podano w km, a podaż i popyt w postaci liczby kontenerów.
Gdynia
Ustka
Kołobrzeg
Szczecin
Częstochowa
482
631
559
482
15
Funkcja celu
Kraków
621
747
631
641
30
Wrocław
499
504
432
353
15
Z ( X ) cij xij min
i
j
Toruń
210
311
347
340
14
Kielce
651
780
691
678
8
36
7
12
27
(w kontenero-kilometrach)
Zmienna decyzyjna xij określa ile kontenerów trzeba przewieźć od
i-tego dostawcy do j-tego odbiorcy, tak aby jak najmniejszym kosztem wywieźć konserwy z portów do odbiorców zgodnie z ich zapotrzebowaniem.
TO ZAGADNIENIE JEST ZAMKNIĘTE!
Matematyczne techniki zarządzania - 222
ETAP 1. Wprowadzenie zer do kolumn przez odjęcie najmniejszych
odległości
• od elementów kolumny 1 odejmujemy 482
• od elementów kolumny 2 odejmujemy 621
• od elementów kolumny 3 odejmujemy 353
• od elementów kolumny 4 odejmujemy 210
Przewozy
ulokujemy
w klatkach
zerowych
• od elementów kolumny 5 odejmujemy 651
Gdynia
Ustka
Kołobrzeg
Szczecin
Częstochowa
0
149
77
0
15
Kraków
0
126
10
20
30
Wrocław
146
151
79
0
15
Toruń
0
101
137
130
14
Dążymy do tego,
aby klatka zerowa
była w każdej
kolumnie i w
każdym wierszu
Kielce
0
129
40
27
8
36
7
12
27
ETAP 2. Wprowadzenie zer do wierszy przez odjęcie najmniejszych
odległości (wiersz 2: 101, wiersz 3: 10)
Gdynia
Ustka
Kołobrzeg
Szczecin
Częstochowa
0
48
67
0
15
Kraków
0
25
0
20
30
Wrocław
146
50
69
0
15
Toruń
0
0
127
130
14
Kielce
0
28
30
27
8
36
7
12
27
Matematyczne techniki zarządzania - 223
ETAP 3. Ulokowanie przewozów w klatkach zerowych
Czynność tę można rozpocząć od dowolnej decyzji, byle ona mogła być jednoznaczna;
gdzie wywieźć kontenery z Gdyni lub ze Szczecina — nie można teraz ustalić, ale można to ustalić dla Ustki i Kołobrzegu
Gdynia
Ustka
Kołobrzeg
Szczecin
Dec. 1:
Częstochowa
0
3
48
67
0 12
15
Kraków
0 18
25
0 12
20
30
Wrocław
146
50
69
0 15
15
7 kontenerów z Ustki do Torunia
Dec. 2: 12 kontenerów z Kołobrzegu do Krakowa
Toruń
0 7
0 7
127
130
14
Dec. 4: 15 kontenerów ze Szczecina do Wrocławia
7 kontenerów z Gdyni do Torunia
Dec. 6:
8 kontenerów z Gdyni do Kielc
Dec. 7:
3 kontenery z Gdyni do Częstochowy
Dec. 8: 12 kontenerów ze Szczecina do Częstochowy
8
36
7
12
27
ROZWIĄZANIE OPTYMALNE
Dec. 3: 18 kontenerów z Gdyni do Krakowa
Dec. 5:
Kielce
0
28
30
27
8
X
3
18
0
7 8
0
0
0
7 0
0
12
0
0 0
12
0
15 0 0
DECYZJE PODEJMOWANE W SPOSÓB PRZYPADKOWY DAWAŁY WYNIKI WYŻSZE 0 5-10%
MINIMALNA WARTOŚĆ FUNKCJI CELU
Z ( X ) 3 482 18 621 0 499 ... 15 353 0 340 0 678 40.130 kkm
Matematyczne techniki zarządzania - 224
INNE METODY „RĘCZNE”
• metoda Forda-Fulkersona (tworzenie dalszych klatek zerowych)
• metoda kąta północno-zachodniego (metoda węgierska)
SIMPLEKS TRANSPORTOWY (PROGRAMOWANIE LINIOWE)
D1
D2
D3
2
1
5
O1
x11
x21
x31
7
3
0
8
02
x12
x22
x32
5
03
11
x13
6
x23
15
x33
3
04
x14
x24
x34
2
7
1
9
JAK TO PRZEKSZTAŁCIĆ W
PROGRAMOWA
-NIE LINIOWE?
6
1
10
TYPOWA TABELKA PROGRAMOWANIA LINIOWEGO
x1
x11
1
x2
x12
1
x3
x13
1
x4
x14
1
1
x5
x21
x6
x22
1
1
3
Gdzie są i jak
powstały macierze A, B i C?
11
x9
x31
x10
x32
x11
x33
x12
x34
1
2
1
1
1
1
y1 y4
1
1
x8
x24
To zadanie łatwiej rozwiązać
zagad1 wykorzystując
1
nienie dualne asymetryczne
1
1
2
x7
x23
itd .
1
1
1
7
1
0
6
1
1
1
5
8
15
1
9
=
= 6
= 1
= 10
= 7
= 5
= 3
= 2
MIN
Jak się mają do siebie macierze zagadnienia transportowego i
macierze programowania liniowego?
Matematyczne techniki zarządzania - 225
Klasyczne zagadnienie transportowe ma wiele wersji i zastosowań,
często do zadań nie mających nic wspólnego z przewozami
Możliwe jest wprowadzenie ograniczeń na przepustowość
poszczególnych tras
ZAGADNIENIE PRZYDZIAŁU
Polega na takim rozdzieleniu n
zadań pomiędzy n wykonawców,
aby łączny efekt był jak najkorzystniejszy (znamy nakład cij
potrzebny i-temu wykonawcy do
wykonania j-tego zadania)
Jeden wykonawca może otrzymać tylko jedno zadanie
Przykłady zagadnienia przydziału
xij uij
MATEMATYCZNIE JEST TO
SZCZEGÓLNY
PRZYPADEK
KZT
Z1
Z2
Z3
Z4
W1
0
0
0
1
W2
1
0
0
0
• asystent ma 15 tematów dla 15 studentów i wie jaką
notę otrzyma każdy student z każdego tematu; celem
będzie taki przydział, aby w sumie grupa uzyskała jak
najwyższą ocenę
• kierownik ma 6 obrabiarek i 6 zadań obróbczych do
wykonania; jeśli wie ile trwa każde zadanie na każdej
obrabiarce, może tak je przydzielić, aby wszystkie zadania zostały wykonane w jak najkrótszym czasie
• jeśli istnieje kolejność obróbki — problem szeregowania
ZWYKLE
DOTYCZY
PRODUKCJI
W3
0
0
1
0
W4
0
1
0
0
min
cij xij
i j
max
n n
n
xij 1
i
n
xij 1
j
xij 0, 1
Matematyczne techniki zarządzania - 226
ANALIZA SIECIOWA
• sieć to uniwersalne narzędzie (można przy jej
użyciu rozwiązywać wiele problemów nie mających żadnej „siatki”)
JAK RYSOWAĆ SIEĆ?
• długości i kąty łuków nie mają
żadnego znaczenia
• rozróżniamy sieci cykliczne i acykliczne
• rozwiązanie sieci polega na znalezieniu:
•
ręcznie
•
najkrótszej drogi
•
programowanie liniowe
•
najdłuższej drogi
•
programowanie dynamiczne
• metody rozwiązywania sieci
•
profesjonalne programy komputerowe
Szukanie najkrótszej drogi (zagadnienie dyliżansu)
c 21
1
c27
2
c23
c72
c32
c31 3
c34 c
43
c41 4
c51 c
45
c54
5
Przykład 48
7
c73
c76
c64
c65
6
c87
c86
c85
8
Cij
km (mile)
godziny
złotówki
cij 0 ( )
cij c ji
Matematyczne techniki zarządzania - 227
Programowanie liniowe — sieć jest szczególnym przypadkiem zagadnienia przydziału:
• zmiennych decyzyjnych jest tyle, ile jest łuków: 1 — iść łukiem,
0 — nie iść łukiem
• warunków ograniczających jest tyle, ile jest węzłów; mamy ich
trzy rodzaje:
•
węzeł początkowy: prawa strona = 1
•
węzeł pośredni: prawa strona = 0
•
węzeł końcowy: prawa strona = —1
•
wyjście z węzła: +1
•
przyjście do węzła: —1
C
Przykład 48 cd.
DO
W
Ę
Z
Ł
A
8
7
6
5
4
3
2
7
c87 x87
6
c86 x86
c76 x76
5
c85 x85
WĘZŁA
4
3
c73 x73
c65 x65
1
1
c32 x32
c23 x23
1
1
c72 x72
c43 x43
c34 x34
1
2
c64 x64
c54 x54
c45 x45
c27 x27
1
A
B
• współczynniki technologiczne:
Z
X
1
c51
c41
c31
c21
x51
x41
x31
x21
1
1
1
1
1
1
1
1
Matematyczne techniki zarządzania - 228
Model decyzyjny
c87 x87 c86 x86 c85 x85 ... c27 x27 c23 x23 c21 x21 min
w .8 : 1 x87 1 x86 1 x85 1
w .7 : 1 x76 1 x73 1 x72 1 x87 1 x72 0
......................................
w .1 : 1 x51 1 x41 1 x31 1 x21 1
Z tych danych możne ułożyć
klasyczną tabelkę programowania liniowego
Model ten można łatwiej
rozwiązać przez wykorzystanie asymetrycznego zagadnienia dualnego
Ogólna postać modelu najkrótszej drogi w sieci
1
x kj x ik 0
( w sieci )
( w sieci )
1
cij x ij min
( w si eci )
x ij 0 lub 1 ( w sieci )
Matematyczne techniki zarządzania - 229
Szukanie najdłuższej drogi (metoda ścieżki krytycznej — CPM)
Przykład 49. Zorganizować budowę domu w jak najkrótszym czasie
Symbol
A
B
C
D
E
F
G
H
I
J
K
L
M
N
Nazwa czynności
Sprowadzenie cegieł
Sprowadzenie dachówek
Wykonanie fundamentów
Budowa murów
Położenie dachu
Budowa ścieków
Wyk. instalacji elektrycznej
Tynkowanie
Wyk. inst. wodno-kanal.
Położenie podłóg
Niwelacja ogrodu
Malowanie i czyszczenie
Montaż stolarki
Założenie ścieżek
Razem
Czas
(dni)
5
12
7
10
4
7
10
6
12
5
2
6
2
2
90
5
B
1
5
C
3
2
6
G
0
D
10
F
7
8
M2
5 10
L
10
6
4
0
0
7
7
4
J
12
A
H
E
6
K
I
12
11
N
2
2
9
KTÓRĘDY PROWADZI NAJDŁUŻSZA DROGA W TEJ SIECI I
JAKA JEST JEJ DŁUGOŚĆ?
Ścieżka krytyczna prowadzi przez węzły 1 - 2 - 3 - 4 - 6 -7 - 8 - 10 - 11
i ma długość wynoszącą 43 dni.
Czynności krytyczne (bez zapasu czasu): C, D, I, H, M, L
Czynności niekrytyczne (z zapasem czasu): A, B, E, F, G, J, N, K
Matematyczne techniki zarządzania - 230
Istnieje wiele rodzajów zapasu czasu i wiele metod jego obliczania
Wszystkie one bazują na danych: xi, xj, yi, yj
17
i
xi
25 5
B
yi
Xi — najwcześniejszy możliwy moment wystąpienia
danego zdarzenia
yi — najpóźniejszy dopuszczalny moment wystąpienia danego zdarzenia
Zapasy czasu
0
1
7
17 0
A 7
D 17
3
4
10
0
0
5
C
7
2
35
29
E
H
7
4
35
6
J
12
0
29
F
G
6
17
7
17
5 10
6
37
K
I
2
N
2
9
19
41
• dla czynności G: 2 dni
• dla czynności J: 3 dni
43
L
37
10
12
7 7
8
M2
Wnioski dla kierownictwa
• dla czynności B: 13 dni
• jak negocjować termin i cenę
• dla czynności E: 8 dni
• których prac pilnować szczególnie
• dla czynności N: 24 dni
• jak reagować na zakłócenia
• dla czynności K: 24 dni
• analiza wrażliwości
43
11
Matematyczne techniki zarządzania - 231
Metoda PERT
PODSUMOWANIE
Czasy wszystkich lub niektórych czynności są zmiennymi
losowymi, danymi np. przez
• całe przedsięwzięcie dzieli się na pojedyncze czynności
t1 (1%), t2, t3 (1%)
Jak liczymy?
Dla każdej czynności
1
E ( t ) ( t1 4t 2 t 3 )
6
1
( t ) ( t 3 t1 )
6
Znajdujemy ścieżkę krytyczną i dla niej liczymy parametry czasu realizacji całego
przedsięwzięcia
E (T ) E ( t )
sc . kr .
2 (T ) 2 ( t )
sc . kr .
• ustala się techniczną kolejność czynności
• ustala się czas realizacji poszczególnych czynności
• buduje się sieć, w której czynności to
łuki, a węzły to momenty czasu (zdarzenia, sytuacje)
• sieć musi mieć jeden początek i jeden
koniec
• dwa zdarzenia mogą być połączone
tylko jednym łukiem, trzeba więc
wprowadzać czynności puste
• szuka się najdłuższej drogi w sieci, co
daje optymalne rozwiązanie problemu
• problem najdłuższej drogi można
także sprowadzić do programowania
liniowego (prawe strony: = —1, 0, +1)
Matematyczne techniki zarządzania - 232
Inny przykład problemu sieciowego
Planowanie zatrudnienia w dużym przedsiębiorstwie o zmiennym (sezonowym zapotrzeowaniu na siłę roboczą
DANE
okresy: 1, 2, ..., i, j, ..., n
Ri — zapotrzebowanie na siłę roboczą w i-tym okresie
cij — koszt rekrutacji jednego pracownika w i-tym okresie i utrzymania go w
pracy do okresu j-tego
ZMIENNA DECYZYJNA
FUNKCJA CELU
xij — liczba pracowników przyjęta do pracy w i-tym okresie i
zwolniona z niej w okresie j-tym
cij xij min
WARUNKI OGRANICZAJĄCE — bilanse pracowników zatrudnionych w i-tym okresie
PROGRAMOWANIE DYNAMICZNE
Polega ona na podziale dużego problemu optymalizacyjnego na szereg
mniejszych problemów rozwiązywanych po kolei (etapami) oddzielnie
Zasada Bellmana
ETAP 1
Si-1— stan układu
na początku etapu
ETAP 2
ETAP i
Si — stan układu na
końcu etapu
S0 dec
.
S1 dec
.
S2 ............ Si 1 dec
.
Si .........
x
x
x
1
2
i
Matematyczne techniki zarządzania - 232
Zasada Bellmana głosi, że decyzja podejmowana w i-tym etapie
jest wyłącznie funkcją stanu układu (systemu) na początku tego
etapu i nie jest zależna od sposobu dojścia do tego stanu
x i f ( S i 1 )
NIE ROZPATRUJEMY NIGDY
ETAPÓW WCZEŚNIEJSZYCH
S i f i ( S i 1 , x i )
Funkcja celu
Zastosowania programowania dynamicznego
•
rozwiązywanie sieci
•
sterowanie zapasami
•
zagadnienia wieloetapowe
•
alokacja kapitału
•
problemy techniczne
•
zagadnienie plecaka
•
programowanie nieliniowe
•
wymiana urządzeń
W trakcie rozwiązywania zadań stosuje się
indukcję odwrotną
ROZWIĄZANIE
OGÓLNE
ETAP OSTATNI
1
n
ROZWIĄZANIE
SZCZEGÓŁOWE
ETAP PIERWSZY
Matematyczne techniki zarządzania - 234
Szukanie najkrótszej drogi (zagadnienie dyliżansu)
Przykład 50. Znajdź metodą programowania dynamicznego najkrótszą
drogę z węzła 8 do węzła 1.
Funkcja celu (stan systemu)
f1 0
f 2 min( c21 f1 ) min(1 0) 1
f3
f4
f5
f6
min(c31
min(c41
min(c51
min(c64
1
4
1
meta
4
6
fi = min
Cij
f1 ; c32 f 2 ) min(4 0; 1 1) 2
km (mile)
f1 ; c43 f 3 ) min(4 0; 1 2) 3
godziny
f1 ; c54 f 4 ) min(6 0; 2 3) 5
złotówki
f 4 ; c65 f 5 ) min( 3 3; 2 5) 6
f 7 min(c72 f 2 ; c73 f 3 ; c76 f 6 )
8
2
min(8 1; 6 2; 1 6) 7
7
6
1
f 8 min(c85 f 5 ; c86 f 6 ; c87 f 7 )
1
3
min(6 5; 4 6; 1 7) 8
1
1
3
6
Wracamy „żółtymi śladami”
4
4
2
najkrótsza droga: 8 - 7 - 6 - 4 - 3 - 2 - 1
6
2
8
jej długość wynosi 8 mil
start
5
Matematyczne techniki zarządzania - 235
Rozwiązanie matematyczne:
x87 x76 x64 x43 x32 x21 1
INTERPRETACJA
min Z ( X ) f 8 8
fi
1. Minimalna wartość funkcji celu po i-tym etapie (badania operacyjne)
2. Stan systemu po i-tym etapie (programowanie dynamiczne)
3. Najkrótsza droga z i-tego węzła do węzła końcowego „1”
Zadanie zostało rozwiązane przy użyciu modelu
f i min( cij f j )
i j
RÓWNANIE
REKURENCYJNE
Wada programowania dynamicznego: nie ma uniwersalnego modelu i do
każdego problemu trzeba budować oddzielny model
Sterowanie zapasami wyrobów gotowych
Przykład 51. Zoptymalizować wielkość zapasów wyrobów gotowych w
fabryce Niezawodny dostawca (wg książki Wagnera)
Dane:
wielkość produkcji xt: od 0 do 5 sztuk
pojemność magazynu it: 4 sztuki
popyt miesięczny stały dt: 3 sztuki
Matematyczne techniki zarządzania - 236
Kryterium decyzyjne: fi = min(koszty produkcji + koszty magazynowania)
Koszty produkcji:
c( xt ) b axt 13 2 xt
Koszty magazynowania:
c(it ) ait 1it
Czas analizy: 6 miesięcy — od I do VI
xt 0
c( xt ) 0
xt
c(xt)
0
0
1
15
2
17
3
19
4
21
5
23
numerujemy miesiące wstecz: lipiec = 0, czerwiec =1 itd.
LIPIEC
n=0
t=0
i0 = 0
f0 0
na koniec czerwca magazyn ma być pusty
CZERWIEC
n=1
t =1
i1
0
1
2
3
nie ma kosztów magazynowania, ale są 4 możliwości, jeśli chodzi
o sposób pokrycia czerwcowego zapotrzebowania (różny udział
produkcji czerwcowej i zapasów z maja); stan zapasów na
początku czerwca: 0, 1, 2, 3
x1(ii)
3
2
1
0
f1(i1)
19
17
15
0
x1 to decyzja wyznaczająca wielkość produkcji w
czerwcu (x1+i1=3), natomiast f1 to skutek
finansowy decyzji x1, zależny także od decyzji
podjętych we wcześniejszych miesiącach, czyli od
stanu na początku etapu 1-szego
Matematyczne techniki zarządzania - 237
MAJ
Teraz mogą wystąpić koszty magazynowania, posłużymy się
więc równaniem rekurencyjnym
n=2
f t min ( k . prod . k .mag . f t 1 )
t=2
x
skutki decyzji bieżącej
stan na początku etapu t
stan zapasów na
początku maja
19=koszty produkcji; 0=koszty magazynowania; 19 z tabelki dla czerwca
i2
x2
0
1
2
3
4
0
0+0+19
0+1+17
1
15+0+19
15+1+17
15+2+15
2
17+0+19
17+1+17
17+2+15
17+3+0
3
19+0+19
19+1+17
19+2+15
19+3+0
4
21+1+17
21+2+15
21+3+0
5
23+2+15
23+3+0
x2(i2)
3
5
4
0
0
f2(i2)
38
26
24
19
18
Szukamy dla każdego wiersza takiej decyzji x2, która da najmniejszą wartość f2 kosztów działalności przedsiębiorstwa w maju i czerwcu łącznie
KWIECIEŃ
n=3
MARZEC
n=4
LUTY
n=5
STYCZEŃ
n=6
Po zakończeniu wszystkich obliczeń otrzymamy następujące rozwiązanie ogólne
(model) minimalizacji kosztów
działalności przedsiębiorstwa przez wybór
optymalnej wielkości produkcji
ROZWIĄZANIE
OGÓLNE
Matematyczne techniki zarządzania - 238
i
TEN MODEL
TEŻ JEST
SIECIĄ
0
1
2
3
4
n=1
x1
3
2
1
0
n=6
i6 0
VI
f1
19
17
15
0
n=2
x2
3
5
4
0
0
V
f2
38
26
24
19
18
n=3
x3
4
5
4
0
0
n=5
x6 3
i5 0
x6 2
i6 1 x 6 3
IV
f3
48
45
43
38
27
i5 1
x6 5
i6 3
itd...
n=5
x5
5
5
4
0
0
II
f5
79
74
72
67
65
n=6
x6
4
5
4
0
0
I
f6
96
93
91
79
75
x5 3
ROZWIĄZANIE
SZCZEGÓŁOWE
i4 0
x5 2
i4 1
x6 4
i6 2
III
f4
67
64
54
48
46
n=4
x5 1
x6 4
n=4
x4
3, 4
5
5
0
0
i6 2
itd...
Znajdziemy je dla i6 = 3, tj.
dla założenia, że stan zapasów na początku stycznia
wynosi 3 sztuki
Szukamy najkrótszej drogi w
tej sieci od zaznaczonego węzła
do węzła końcowego, tj. takiej
strategii produkcji wyrobów,
która odpowiada minimalnym
kosztom działalności przedsiębiorstwa
DECYZJA Z MODELU
79
i6 3
x6 0
k0
Matematyczne techniki zarządzania - 239
79
i5 0
54
x5 5
k 23 2 25
i4 2
27
x4 5
k 23 4 27
i3 4
26
x3 0
i2 1
k 1
n=6
n=5
n=4
n=3
n=2
STYCZEŃ
LUTY
MARZEC
KWIECIEŃ
MAJ
OPTYMALNA DECYZJA
0
x2 5
k 23 3 26 i1 3
n=1
x1 0
k0
CZERWIEC
0
(optymalny plan produkcji)
i0 0
dla założenia i6 = 3
n=0
X = [0 5 5 0 5 0]
LIPIEC
Podobnie można znaleźć optymalne rozwiązanie dla innych założeń
odnośnie do zapasu wyrobów na początek stycznia
Wzór rekurencyjny stosowany do tego zadania
skutki decyzji bieżącej
stan na początku etapu t
Koncentracja
produkcji!
Dlaczego?
f t ( i ) min [C ( x ) 1( i x 3) f t 1 ( i x 3)]
x
3 i x min5, 7 i
dla t 2, 3,....,6
Wynika to z
efektu skali!
Matematyczne techniki zarządzania - 240
xi
1
2
3
4
5
C(xi)
15
17
19
21
23
ANALIZA WRAŻLIWOŚCI
kjedn
15,00
8,50
6,33
5,25
4,60
• horyzont planowania
• zapas początkowy
• pojemność magazynu
• zdolność produkcyjna
• popyt
Optymalny rozdział nakładów inwestycyjnych
Przypomnienie: należy rozdzielić kwotę K pomiędzy n obiektów o efektywności qi(xi), gdzie xi — kwota przydzielona i-temu obiektowi, tak aby
łączny efekt z kwoty K był możliwie jak największy
Rozwiązanie
ogólne
K x1 x2 x3
K
x2
x1
Funkcje
efektywności
poszczególnych
obiektów
Równanie
rekurencyjne
(funkcje celu)
1
x3
3
2
q1 ( x1 )
f1
K [ x1 x2 ]
q2 ( x2 )
f2
q3 ( x3 )
f3