AUTOMATYKA
i
ROBOTYKA
Wykładowca : dr inż. Iwona Oprzędkiewicz
Nazwa wydziału: WIMiR
Nazwa katedry: Katedra Automatyzacji Procesów AGH
Sprawy organizacyjne
•
Wykłady (30 h)
• Dr inż. Iwona Oprzędkiewicz
• Katedra Automatyzacji Procesów
• piątek B3 s. 120 godz. 8.00 – 9.30
• Ćwiczenia (15 h)
• Dr inż. Iwona Oprzędkiewicz
• piątek B2 s. 135 godz. 9.45 – 11.15 (11.30 -13.00)
• 3 grupy, zajęcia co drugi tydzień
Ćwiczenia
• Konsultacje:
Czwartek B3 I piętro p.108/7
Godz. 11.15 – 12.45
• Kontakt:
[email protected]
Zaliczenie przedmiotu
• Ocena końcowa wyznaczana jest w oparciu o:
1. zaliczenie z ćwiczeń
2. uczestnictwo w wykładach
Przy czym:
1. wykłady są nieobowiązkowe
2. na wykładach będzie sprawdzana obecność
3. prawie 100% frekwencja (dopuszczalna 1 nieobecność) na
wykładach podwyższa ocenę końcową o pół stopnia (oprócz
oceny 2.0 i 5.0)
4. Osoby, których frekwencja jest poniżej 20% (mniej niż 3
wykłady) na ostatnim wykładzie piszą test sprawdzający z
wykładu.
Warunki zaliczenia ćwiczeń
• obecność na ćwiczeniach jest obowiązkowa.
• na przedostatnich zajęciach będzie kolokwium zaliczeniowe
(po jednym zadaniu z każdych ćwiczeń).
• ocena na koniec semestru obliczana jest jako średnia ważona
z otrzymanych ocen (z kolokwium i ocen z odpowiedzi), z tym,
że waga oceny z kolokwium wynosi 3 a z odpowiedzi 1.
• osoby, które uzyskają średnią < 2,76 piszą kolokwium
poprawkowe na ostatnich zajęciach w semestrze.
• Wpisywanie zaliczeń i ocen końcowych na ostatnim wykładzie.
Warunki zaliczenia ćwiczeń
Średnia < 2,76 – brak zaliczenia
2,76 – 3,25 dst
3,26 – 3,75 +dst
3,76 – 4,25 db
4,26 -4,75 +db
Średnia > 4,75 - bdb
Terminy ćwiczeń
l.p
data
temat
1.
5.X. i 12.X.2012
Modele matematyczne układów
2.
19.X. i 26.X.2012
Rachunek operatorowy i
transmitancja operatorowa
3.
9.XI. i 16.XI.2012
Charakterystyki czasowe
4.
23.XI. i 30.XI.2012
Charakterystyki częstotliwościowe
5.
7.XII. i 14.XII.2012
Wymagania stawiane układom reg.
6.
21.XII. i 4.I. 2013
Regulatory
7.
18.I.2013
kolokwium dla wszystkich grup
8.
25.I.2013
kolokwium poprawkowe
Tematyka wykładu:
•
•
•
•
•
•
•
•
•
•
Pojęcia podstawowe
Modele matematyczne członów i układów
Linearyzacja modeli nieliniowych
Podstawowe własności rachunku operatorowego
Własności statyczne i dynamiczne podstawowych
członów automatyki
Struktura układów regulacji
Wymagania stawiane układom automatyki
Regulatory: rodzaje, dobór nastaw
Nieliniowe układy automatyki
Realizacja układów automatyki
Tematyka ćwiczeń
1. Modele matematyczne członów i układów liniowych.
2. Podstawowe własności rachunku operatorowego,
transformata Laplace’a.
3. Rozwiązywanie równań za pomocą rachunku
operatorowego.
4. Wyznaczanie transmitancji układów liniowych.
5. Charakterystyki czasowe i częstotliwościowe
(wyznaczanie).
6. Wymagania stawiane układom automatyki.
7. Regulatory w układach regulacji (dobór typów i
nastaw).
Literatura
•
•
•
•
Żelazny M.: Podstawy automatyki
Kowal J.: Podstawy automatyki
Kaczorek T.: Teoria sterowania
Jędrzykiewicz Z.: Teoria sterowania układów
jednowymiarowych
• Pełczewski W.: Teoria sterowania
Strona internetowa przedmiotu
http://galaxy.uci.agh.edu.pl/~o_iwona/podstawy_aut/index.html
/* będą tam umieszczane prezentacje kolejnych wykładów*/
Pojęcia podstawowe
Czym się zajmuje automatyka?
• Automatyka jest dziedziną wiedzy, która
zajmuje się zagadnieniami automatycznego
sterowania procesów.
Co to jest proces?
• Procesem nazywamy zjawisko, lub kompleks
zjawisk, wywołanych w celu realizacji
określonych zadań.
E
Pojęcia podstawowe
w1
ws
•
•
•
•
•
Proces
y1
yp
S
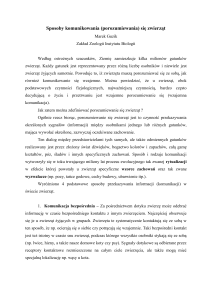
Wielkości fizyczne występujące w procesie sterownia, będącą funkcją
czasu i wykorzystywane do przekazywania informacji nazywamy
sygnałami.
Sygnałami wyjściowymi nazywamy sygnały, których przebieg określa
przebieg procesu.
Sygnałami wejściowymi nazywamy sygnały, których przebieg wpływa na
przebieg procesu.
Sygnałami sterującymi ( sterowaniami ) nazywamy sygnały wejściowe,
które możemy zmieniać w sposób ustalony. Sterowania są oznaczane
przez u.
Sygnałami zakłócającymi ( zakłóceniami ) nazywamy sygnały wejściowe,
na które nie mamy wpływu. Zakłócenia są oznaczane przez z.
Pojęcia podstawowe
z1
zM
u1
ur
Zadajnik
Proces
u1
ur
Proces
y1
yn
y1
yp
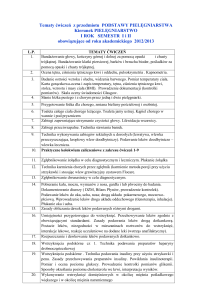
Schemat układu regulacji
z1
w1
wk
wi
+
yi
i
1=u1
r=ur
zM
y1
Proces
yk
- węzeł sumacyjny
•
Błędem ( uchybem ) regulacji nazywamy różnicę
pomiędzy sygnałem zadanym i sygnałem wyjściowym z
procesu:
i = wi - yi
•
•
•
Układem zamkniętym ( układem ze sprzężeniem
zwrotnym ) nazywamy układ, w którym sygnały
wyjściowe z procesu mogą oddziaływać na jego wejście.
Urządzenie przetwarzające sygnał błędu na sygnał
sterujący nazywamy regulatorem.
Związki matematyczne pomiędzy sterowaniami i
wyjściami nazywamy modelami matematycznymi
procesu.
Podział obiektów (członów) automatyki ze względu
na rodzaj energii zasilającej
• elektryczne
Zalety:
- duży wybór elementów;
- dostępność energii elektrycznej;
- łatwość przesyłania sygnałów elektrycznych na duże
odległości.
Wady:
- ciężkie i bezwładne człony wykonawcze;
- często skomplikowana budowa.
Podział obiektów (członów) automatyki ze względu
na rodzaj energii zasilającej
• pneumatyczne
Zalety:
- zasilanie sprzężonym powietrzem (bezpieczeństwo).
Wady:
- ograniczona odległość przesyłania sygnałów (200-300m);
- wolne działanie;
- duże rozmiary;
- mała niezawodność.
Podział obiektów (członów) automatyki ze względu
na rodzaj energii zasilającej
• hydrauliczne
Zalety:
- korzystne własności oleju (smarowanie i ochrona);
- małe wymiary członów wykonawczych;
- duże moce;
- duża niezawodność.
Wady:
- znacznie ograniczona odległość przesyłania (do kilku m);
- ciężkie przewody sygnałowe;
- konieczność uszczelniania instalacji;
- zagrożenie wybuchem i pożarem.
Modele matematyczne
• Własności układu zdeterminowane przez zbiorniki energii
lub masy w układzie nazywamy własnościami
dynamicznymi układu ( krótko – dynamiką układu ).
• Stanem ustalonym w układzie nazywamy stan, w którym
zbiorniki energii lub masy w układzie są napełnione, co się
objawia stałym poziomem sygnału wyjściowego.
Modele matematyczne
dx
p (t ) q (t )
dt
x(t) – ilość masy lub energii zgromadzona w zbiorniku;
p(t) – ilość masy lub energii dopływającej do układu w jednostce czasu;
q(t) - ilość masy lub energii odpływającej do układu w jednostce czasu;
Wnioski:
•
•
Równania opisujące przebieg procesu ( a więc jego model
matematyczny ) zawierają pochodne względem czasu, są to więc
równania różniczkowe.
Jeżeli zbiorniki energii układu mogą być uznane za skupione w
przestrzeni, to w równaniach występują tylko pochodne względem
czasu i model jest układem równań różniczkowych zwyczajnych.
Jeżeli natomiast zbiorniki energii są rozłożone w przestrzeni, to
oprócz pochodnych względem czasu wystąpią też pochodne
względem zmiennej przestrzennej i wtedy model będzie miał postać
układu równań różniczkowych cząstkowych.
Modele matematyczne ( wnioski cd. )
•
•
Jeżeli chcemy wyznaczyć zachowanie się układu pod
wpływem sterowań, to oprócz przebiegu funkcji sterującej
musimy znać „zawartość” zbiorników energii w momencie
rozpoczęcia sterowania. Z matematycznego punktu widzenia
oznacza to, że dla każdego z równań różniczkowych,
opisujących jeden zbiornik musimy mieć zdefiniowany
warunek początkowy.
W tym momencie należy jeszcze zaznaczyć, że do tej pory nic
nie mówiliśmy o związku pomiędzy wewnętrznymi zbiornikami
energii w układzie, a sygnałami wyjściowymi. Należy tu
stwierdzić, że w przypadku ogólnym nie jest to zależność
prosta.
Modele matematyczne – zmienne stanu
• Zmiennymi stanu (symbol x(t)) układu
nazywamy zmienne opisujące zawartość
wewnętrznych zbiorników energii układu;
• Ilość zmiennych stanu potrzebnych do opisu
procesu jest równa ilości niezależnych
zbiorników energii w układzie;
• Rzędem układu nazywamy ilość niezależnych
zbiorników energii w układzie. Jest on równy
ilości współrzędnych stanu.
x f ( x, u )
y g ( x, u )
Budowa modelu matematycznego w oparciu o
analizę bilansową w układzie.
1. Określenie granic układu będącego przedmiotem naszego
zainteresowania, tj. wskazać, jakie części rzeczywistości
uznajemy za układ, który chcemy opisać,
2. Określenie powiązania naszego układu z otoczeniem poprzez
wprowadzenie odpowiednich więzów lub sygnałów wejściowych,
3. Wybór zmiennych fizycznych ( sygnałów ) , występujących w
układzie, przy czym wygodnie jest podzielić je na dwie grupy:
• zmienne przepływu – są one miarą wielkości przepływającej
przez element, np. prąd przepływający przez rezystor, ciecz lub
gaz przepływający przez rurociąg.
• zmienne spadku – są one miarą różnicy stanów na dwóch
końcach elementu, np. różnica potencjałów na dwóch końcach
rezystora, spadek ciśnienia po obu stronach zwężki w rurociągu,
itp.
Budowa modelu matematycznego w oparciu o
analizę bilansową w układzie cd.
4. Napisanie równania określające zachowanie się układu.
Równania te można podzielić na dwie grupy:
• równania bilansowe – są to równania określające równowagę
układu, dotyczą one zmiennych przepływu,
• równania spójności określające zależności występujące
pomiędzy zachowaniem się poszczególnych elementów układu
ze względu sposób połączenia tych elementów. Dotyczą one
zmiennych spadku.
5. Uwzględnienie zależności fizycznych. Są to prawa fizyki
łączące zmienne przepływu ze zmiennymi spadku; dzięki nim
eliminuje się zmienne zależne, pozostawiając tylko zmienne
niezależne.
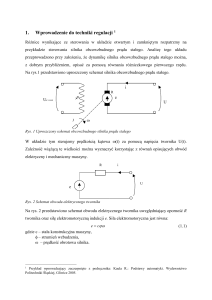
Przykład – model matematyczny silnika prądu
stałego
i
R
u(t)
(t)
e
Schemat silnika prądu stałego.
Przykład – model matematyczny silnika prądu
stałego
1. Granice układu: rozważamy sam silnik, bez źródła
zasilania, obciążenia i podłoża,
2. Uwzględnienie więzów: Jako elementy łączące nasz
układ otoczeniem przyjmiemy następujące sygnały:
• sygnałem wejściowym jest napięcie zasilające,
• obciążenie silnika zastąpimy dodatkowym momentem
przyłożonym na wał silnika,
• podłoże zastąpimy odpowiednimi siłami reakcji.
Przykład – model matematyczny silnika prądu
stałego
4. Wielkości fizyczne: w rozważanym silniku wyróżniamy dwie części: elektryczną
(uzwojenia ) oraz mechaniczną ( wirnik ). Część elektryczna może być dobrze
opisana przez dwójnik RL zawierający następujące elementy: rezystancję R,
indukcyjność L oraz źródło napięcia reprezentujące siłę elektromotoryczną
indukującą się w uzwojeniach podczas ruchu obrotowego wirnika. Jako sygnały
występujące w części elektrycznej można więc przyjąć:
•
uu - napięcie zasilania,
•
ur - spadek napięcia na rezystancji,
•
ul - spadek napięcia na indukcyjności,
•
us - siła elektromotoryczna indukowana w uzwojeniach.
Część mechaniczna to obracający się wirnik, na który działają określone momenty
mechaniczne, które przyjmiemy jako sygnały występujące w tej części układu:
•
M1 – moment napędowy,
•
M2 – moment obciążenia,
•
M3 - moment tarcia,
•
M4 – moment bezwładności.
Przykład – model matematyczny silnika prądu
stałego cd.
4. Ułożenie równań: w tym przypadku musimy ułożyć dwa równania:
jedno dotyczące zmiennych spadku ( dla części elektrycznej ) –
będzie to równanie spójności, oraz drugie dotyczące zmiennych
przepływu ( dla części mechanicznej ) - będzie to równanie
bilansowe. Równanie spójności napiszemy korzystając z prawa
Kirchoffa. W tym wypadku suma wszystkich napięć w układzie musi
być równa zero. Z kolei równanie bilansu ułożymy korzystając z faktu,
że suma wszystkich momentów w układzie (łącznie z momentem
bezwładności ) jest równa zero. Oba równania możemy więc zapisać
następująco:
vu – vr – vl – vs = 0
(1)
M1 – M2 – M3 – M4 = 0
(2)
Przykład – model matematyczny silnika prądu
stałego cd.
5. Zależności fizyczne: w naszym wypadku są to
powszechnie znane z fizyki wzory, które dla
przypomnienia zapiszemy poniżej:
v r iR
di
vl L
dt
v s k1
M 1 k 2i
M 3 k 3
d
M4 J
dt
gdzie: i – oznacza natężenie prądu w uzwojeniach, - oznacza
prędkość kątową wału silnika, J -oznacza moment
bezwładności, k1 k2 k3 - oznacza stałe współczynniki.
•
Uwzględniając powyższe zależności w równaniach ( 1 ) i ( 2 )
otrzymujemy:
Przykład – model matematyczny silnika prądu
stałego cd.
di
vu iR L k1 0
dt
d
k 2 i M 2 k 3 J
0
dt
•
Powyższe równania porządkujemy w taki sposób, aby pochodne
znalazły się po lewej stronie i otrzymujemy równanie stanu dla
naszego systemu. Będzie ono mieć następującą postać:
k1
R
1
di
i
vu
dt
L
L
L
d k 2 i k 3 1 M
2
dt
J
J
J
•
•
Równanie wyjścia będzie miało postać:
y=