Ćwiczenie Nr 10
Zastosowanie programu PCNAP analizie i projektowaniu
obwodów
Cel ćwiczenia:
Zapoznanie się z językiem symulacyjnym PCNAP do analizy obwodów elektrycznych i elektronicznych.
1. Opis programu PCNAP
Program PCNAP umożliwia w prosty sposób symulację obwodów elektrycznych i elektronicznych bez potrzeby
wypisywania równań Kirchhoffa. Użytkownik opisuje w sposób symboliczny topologię obwodu, deklaruje
rodzaje wymaganej analizy (analiza stanu ustalonego, nieustalonego, optymalizacja) a nadepnie uruchamia
program. Wyniki mogą być wyprowadzane albo do procesora graficznego PROBE (plik probe.dat) albo do
Matlaba (plik nap.mat). Przykładowa struktura ogólna programu
*circuit
*: Komentarz – nagłówek
: Komentarz
Opis topologii obwodu
Instrukcje sterujące analizą i rodzajem analizy
*run
Modyfikacje obwodu i ewentualnie rozkazów analizy
*run
*end
Program wymaga uruchomienia go pod systemem DOS/Novell. Program akceptuje zarówno duże jak i małe
litery w oznaczeniach elementów i rozkazach analizy.
1.1 Opis topologii obwodu
Program PCNAP umożliwia analizę obwodów zawierających elementy R, L, C, M (liniowe bądź nieliniowe),
dowolne rodzaje źródeł sterowanych, źródła niezależne, cały szereg podstawowych elementów elektronicznych
(diody, tranzystory bipolarne, tranzystory złączowe) oraz modele złożonych układów elektronicznych
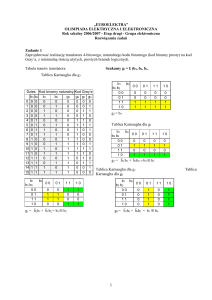
(wzmacniacze operacyjne, tyrystory itp.). Elementy pasywne RLC oraz źródła niezależne są deklarowane w
programie jako gałąź Branina jak to przedstawiono na rys. 1 przy podanych zwrotach prądów i napięć (kierunek
prądu źródła prądowego przeciwny do kierunku napięcia na źródle napięciowym).
i
ik
yk
uk
u
Jk
Ek
Rys. 1 Ogólna postać gałęzi Branina z oznaczeniami kierunków prądów i napięć
Deklaracja elementów pasywnych R, L, C, M odbywa się przez podanie węzłów do których dołączony jest
element oraz wartości.
Przykłady:
R1 1 2 10k
:rezystor włączony między węzłami 1 i 2 o wartości R1=10kΩ
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
1
G1 2 3
L1 1 3
L2 4 5
M12 L1
C1 4 6
2m
2m
4m
L2 2.5m
1u
:rezystor włączony między węzłami 2 i 3 o konduktancji G1=2mS
:indukcyjność własna L1 włączona między węzłami 1 i 3 o wartości L1=2mH
:indukcyjność własna L2 włączona między węzłami 4 i 5 o wartości L2=4mH
:indukcyjność sprzężona dwu cewek L1 i L2 o wartości M12=2.5mH
:kondensator o pojemności C1=1μF włączony między węzłami 4 i 6
Źródła niezależne prądu i napięcia są deklarowane jako subparametry elementów RLC gałęzi Branina zgodnie
ze zwrotem na rys. 1. Sposób padania ich wartości zależy od rodzaju analizy obwodu. Przy analizie w
dziedzinie czasu podaje się wartości tych źródeł (może być to również funkcja czasu).
Przykłady:
: źródło idealne napięcia stałego włączone między węzłami 1 i 2 od węzła 1 do węzła 2)
o wartości E=10V
G1 1 2 0 J=4
: źródło idealne prądu stałego płynącego od węzła 1 do węzła 2 o wartości J=4A
R1 1 2 0 E=fun(time) :źródło idealne napięcia zmiennego włączone między węzłami 1 i 2 o wartości zmiennej
określonej funkcją czasu fun(time). Funkcja ta musi być wcześniej zdeklarowana
G1 1 2 0 J=fun(time) : źródło idealne prądu stałego włączone między węzłami 1 i 2 o wartości zmiennej
określonej funkcją czasu fun(time). Funkcja ta musi być wcześniej zdeklarowana
R1 1 2 0 E=10
W przypadku analizy częstotliwościowej obwodu podaje się wartości skuteczne zespolone prądu lub napięcia
(re, im) lub moduł i fazę wartości zespolonych (ma, ph). Typ źródła rozpoznaje się po literze oznaczającej
rezystancję za pośrednictwem której wprowadza się źródło: R – wskazuje na źródło napięciowe, G – na źródło
prądowe.
Przykłady:
R1 1 2 0 ma=10 ph=45
G1 1 2 0 re=6 im=8
: źródło idealne napięcia sinusoidalnego do analizy częstotliwościowej włączone
między węzłami 1 i 2 o module i fazie wartości skutecznej zespolonej równej
odpowiednio 10V i 45o
: źródło idealne prądu sinusoidalnego do analizy częstotliwościowej włączone
między węzłami 1 i 2 o części rzeczywistej i urojonej wartości skutecznej zespolonej
równej odpowiednio 6 i 8.
Źródła sterowane prądu i napięcia definiuje się poprzez podanie węzłów do których są dołączone oraz
elementu sterującego i sposobu sterowania. Źródło napięcia rozpoznaje się po pierwsze literze v, a źródło prądu
po literze i. Sterowanie źródła może odbywać się poprzez napięcie (v) lub prąd (i) dowolnego elementu w
obwodzie albo ich pochodnych po czasie sv (dv/dt) lub si (di/dt) z podaniem wartości współczynnika sterowania
(przy braku tej wartości program przyjmuje wartość nieskończoną).
Przykłady:
: źródło prądu ist1 włączone między węzły 3 i 4 (prąd od węzła 3 do 4)
sterowane napięciem na rezystorze R1 ze współczynnikiem sterowania
równym 10
R1 1 2 1k; vst2 3 4 15 iR1
: źródło napięcia vst2 włączone między węzły 3 i 4 (strzałka napięcia przy
węźle 4) sterowane prądem rezystora R1 ze współczynnikiem sterowania
równym 15
R1 1 2 1k; vst3 3 4 23 svR1 : źródło napięcia włączone między węzły 3 i 4 (strzałka napięcia przy węźle
4) sterowane pochodną napięcia na rezystorze R1 ze współczynnikiem
sterowania równym 23
iniel 1 2 0.2*fun(viniel)
: źródło prądu włączone między węzły 1 i 2 sterowane własnym napięciem
realizuje zależność funkcyjną rezystora nieliniowego i=0.2*fun(vi) o
zdefiniowanej wcześniej funkcji fun().
Gop 1 2 0; vop 3 0 vgop
: model idealnego wzmacniacza operacyjnego włączonego między węzłami
3 i 0 sterowanego napięciem na rezystorze opisanym konduktancja Gop
(węzeł 1 - zacisk + wejścia wzmacniacza, węzeł 2 – zacisk –
wzmacniacza).
R1 1 2 1k;
ist1 3 4 10 vR1
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
2
W definicji elementów można używać szeregu funkcji nieliniowych.
Typ funkcji obejmuje następujące rodzaje funkcji: abs, exp, log, sin, tan, atan, tab1, tab2, pol, min, max, blank
(pusty). Typ funkcji jest skojarzony z wartościami parametrów, tworząc wartość funkcji według wzoru
f ( x) a b fun(cx d )
e
w którym a, b, c, d, e są parametrami zadanymi przez użytkownika (wartości wbudowane: a=0, b=1, c=1, d=0,
e=1).
Szczególnymi typami funkcji są tab1 i tab2. Obie tablicują wartości dyskretne funkcji. Funkcja tab1
definiowana jest w postaci
nazwa_funkcji/tab1/ c=wartość d=wartość, y1 y2 y3 ….
Parametr oznacza wartość początkową zmiennej x, d – przyrost na osi x a wartości y1, y2, y3 … wyznaczają
wartości funkcji dla kolejnych wartości zmiennej x. Funkcja tab2 jest definiowana przez jawne podanie
kolejnych wartości obu zmiennych (x,y), a składnia tej funkcji jest zadana w postaci
nazwa_funkcji/tab2/ x1 y1 x2 y2 x3 y3 ….
lub w przypadku funkcji okresowej o okresie p
nazwa_funkcji/tab2/ p=wartość x1 y1 x2 y2 x3 y3….
W ostatnim przypadku kolejne pary punktów (x,y) muszą w całości opisywać funkcję jedynie w okresie p.
Przykłady:
sin/sin/b=100 c=314 d=-pi/2 : definicja funkcji sinusoidalnej f(x)=100sin(314x+pi/2)
pulse/tab2/p=100m 0 0 0.01m 10 49.99m 10 50.01m -10 99.99m -10 100m 0
:impuls
prostokątny
dwubiegunowy o okresie 100ms.
: definicja funkcji wielomianowej f(x)=x-2x2+5x3
Tak zdefiniowane funkcje mogą być użyte w definicji zarówno nieliniowych elementów pasywnych jak i źródeł.
wielomian/pol/ a0=0 a1=1 a2=-2 a3=5
Elementy półprzewodnikowe wprowadza sie się poprzez zdefiniowane typu elementu oraz osadzenie go w
odpowiednich węzłach obwodu. Dopuszczalne są następujące typy elementów:
diode dioda złączowa
npn
tranzystor bipolarny npn (model Ebersa-Molla)
pnp
tranzystor bipolarny pnp (model Ebersa-Molla)
njfet tranzystor unipolarny z kanałem N
pjfet tranzystor unipolarny z kanałem P
Każdy typ elementu jest skojarzony z odpowiednią listą parametrów opisujących jego właściwości fizyczne
(standardowo są wpisane ich wartości wbudowane) podawane jako nazwa listy.
Deklaracja diody w programie oprócz zdefiniowania typu elementu ma postać
Txx węzeł A węzeł K nazwa listy
W przypadku tranzystora bipolarnego definiuje się go komendą
Txx węzełC węzełB węzeł E nazwa listy [ew. wartości parametrów skojarzonych z tranzystorem]
Tranzystor polowy wprowadzony jest podobnie jak bipolarny z odpowiednią zmianą nazwy elektrod
Txx węzełD węzełG węzełS nazwa listy [ew. wartości parametrów skojarzonych z tranzystorem]
Przykłady:
d1/diode/is=1e-15 vt=28m; td1 1 2 d1
BCX/npn/is=1e-14 vt=26m af=0.98; tr1 1 2 3 BCX
XJF/njfet/vp=-2 cs=5p Cd=5p;
tjf1 1 2 3 XJF
: dioda włączona między węzły 1 i 2
: tranzystor bipolarny o węzłach: 1 - C, 2 – B, 3 – E
: tranzystor polowy o węzłach: 1 –D, 2 –G, 3 – S.
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
3
Elementy o bardziej złożonej strukturze układowej (np. inne od standardowych modele tranzystorów,
wzmacniacz operacyjny, tyrystor) mogą być odwzorowane poprzez ich modele zapisane w programie w postaci
stałej (niemodyfikowalnej przez użytkownika) biblioteki LIB1 lub biblioteki lokalnej użytkownika LIB2.
Czytanie zawartości biblioteki odbywa się komendą
*LIB1 nazwa_danej_biblioteki
: czytanie z biblioteki LIB1
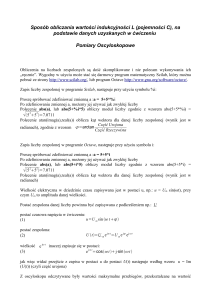
Przykładowe wykorzystanie biblioteki opamp wzmacniacza operacyjnego w opisie topologii nieidealnego
układu całkującego o strukturze przedstawionej na rys. 2 pokazano poniżej
R2
C
R1
U1
1
22
∞
3
U0
Rys. 2 Struktura układu całkującego nieidealnego
*circuit
R1 1 2 1k
R2 2 3 100k
C 2 3 0.1u
qop1 2=10 0=11 3=15 0=0
*lib1opamp
q*
: ostatnie 3 linie definiują wzmacniacz operacyjny włączony w obwodzie
:(zacisk wewnętrzny 10 wzmacniacza oznacza wejście inwersyjne, zacisk
: 11 – nieinwersyjne, 15 – wyjście , 0 – “masę”).
1.2 Instrukcje sterujące analizą
*circuit – instrukcja ta sygnalizuje początek opisu obwodu. Wszystkie instrukcje programu poprzedzające ją są
ignorowane.
*end – instrukcja ta kończy działanie programu i przekazuje sterowanie do systemu operacyjnego, zamyka
wszystkie otwarte biblioteki i wykonuje rozkaz *reset
*reset - zeruje wszystkie rozkazy analizy i uzmienniania parametrów, przywracając jednocześnie wszystkim
parametrom rozkazu *run wartości wbudowane.
*run – powoduje wykonanie wszystkich zadeklarowanych do tej pory rozkazów analizy. Instrukcji tej mogą
towarzyszyć parametry sterujące analizą (step, min step, max step, cycle, trunc itp.)
*time – definiuje parametr (zmienną niezależną) analizy w dziedzinie czasu (*tr lub *dc)
Instrukcja *time może służyć do uzmienniania czasu bądź wybranego parametru w obwodzie według schematu:
*time tmin tmax Δt
: definiowanie czasu analizy od tmin do tmax z krokiem Δt
*time tmin tmax
: definiowanie czasu analizy od tmin do tmax z krokiem automatycznie
dobieranym przez program
*time r1.e emin emax Δe : zmiana wartości źródła e od emin do emax z krokiem Δe
*time r1 rmin rmax Δr
: zmiana rezystancji r od rmin do rmax z krokiem Δr
*freq – definiuje zmianę częstotliwości (lub innej zmiennej niezależnej) w analizie częstotliwościowej obwodu.
*freq fmin fmax Δf
: liniowa zmiana częstotliwości od fmin do fmax z krokiem Δf
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
4
*freq fmin fmax -n
: logarytmiczna zmiana częstotliwości od fmin do fmax z liczba punktów n
*freq omega ωmin ωmax Δω: liniowa zmiana pulsacji od ωmin do ωmax z krokiem Δω
Program umożliwia następujące rodzaje analizy obwodu:
*dc – analiza stałoprądowa obwodu liniowego lub nieliniowego (wymuszenie DC)
*ac – małosygnałowa analiza w dziedzinie częstotliwości (stan ustalony przy wymuszeniu sinusoidalnym)
*tr – analiza stanu nieustalonego w dziedzinie czasu z warunkami początkowymi zadanymi instrukcją *modify
lub ustalonymi poprzez analizę *dc
*dctr – wykonanie najpierw analizy *dc a następnie *tr
*modify – instrukcja umożliwiająca zmianę wartości elementu obwodu lub parametru, ustalenie warunku
początkowego, przypisanie tolerancji elementom. Wartość elementu można również zmienić przy użyciu kropki
poprzedzającej element (na przykład .R1=2.1k)
W wyniku przeprowadzonej analizy program może wyprowadzać wiele różnych wielkości. Można
wyprowadzać następujące wielkości:
Napięcie węzłowe lub niędzywęzłowe
v1 v12
Napięcie na elemencie
vr1 vtd vc
Prąd elementu
ir1 itd iL
Moc elementu
pwrload pwr3 pwtd
Wartość elementu lub parametru
r1 c1 r1.e bc107.ac
Transmitancja
v1/er1 iL/jgs
Wrażliwość
v1/r1 v1/c1
Program umożliwia wyprowadzanie grupowe wyników. Można użyć następujących sposobów wyprowadzania:
vnall
wszystkie napięcia węzłowe
vall
wszystkie napięcia na elementach
iall
wszystkie prądy elementów
pwall
moce wszystkich elementów
all
wszystkie wcześniej wymienione wyniki
W analizie *AC standardowo wyprowadzane są moduły wartości zespolonej wyniku. Aby wyprowadzić inne
wielkości zmienną należy poprzedzić odpowiednimi przedrostkami:
*re
część rzeczywista
*im
część urojona
*ma
moduł w skali liniowej
*db
moduł logarytmiczny w dB
*ph
faza w stopniach (-180o, 180o)
*rad
faza w radianach
*log
moduł logarytmiczny w neperach
*probe – wyprowadzenie wyników do pliku probe.dat dla postprocesora graficznego PROBE.
*matlab – wyprowadzenie wyników do pliku pcnap.mat dla programu MATLAB.
Przykłady użycia instrukcji sterujących:
:Analiza stanu nieustalonego
*time 0 10m 0.01m
*tr *probe v1 vr1 vc1 vtd1
*run
*modify V1=10 iL=2
*run
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
5
:Analiza częstotliwościowa
*freq 1 1meg -100
*ac *probe *ma v1 *ph v1 v2 vc1
*run
.R1=2.1k
*run
2. Przykład analizy TR
Rys. 3 przedstawia strukturę multiwibratora astabilnego poddanego analizie TR.
Rys. 3 Struktura obwodu multiwibratora
*circuit
*list 9
*: Multivibrator astabilny >
v1 is coll voltage and v3 is base voltage of tr1
bc107/npn/ vt=30mV is=2.2e-12 ni=3e3 nv=1.63 af=.9945 >
ng=1.2e-4 tf=.8ns tr=.4ns ce=12pF cc=5pF ga=.3
tr1 1 3 0 bc107
tr2 4 2 0 bc107
rc1 1 0 4k e=12V ; rc2 4 0 4k e=12V
rb1 2 0 40k e=12V ; rb2 3 0 40k e=12V
c1 1 2 10nF ; c2 4 3 10nF
*modify v1=12V
: warunki początkowe
*time 0 1ms
*tr *probe v1 v4 v3 v2
*run trunc=1e-3 minstep=.01ns
*end
3. Przykład analizy AC
Rys. 4 przedstawia strukturę filtru poddanego analizie. Jego transmitancja napięciowa wyrażona jest wzorem
ogólnym
Y1Y3
T
Y5 Y1 Y2 Y3 Y4 Y3Y4
przy czym w naszym przypadku Y1=G1, Y2=sC2, Y3=G3, Y4=G4, Y5=sC5
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
6
Rys. 4 Struktura filtru bikwadratowego z wielopętlowym sprzężeniem zwtotnym
*circuit
*: Filtr DP
rwe 1 0 0 ma 1 ph 0
g1 1 2 1
c2 2 0 2
g3 2 3 0.81
g4 2 4 1
c5 3 4 0.41
:Wzmacniacz operacyjny
qop 3=10 0=11 4=15 0 =0
*lib1 opamp
q*
*freq .001 1.2 .01
*ac *probe *ma v4 *ph v4
*run
*reset
.rwe 1 0 0 e=1
*time 0 15
*tr *probe v4
*run
*end
4. Przykład analizy DC
Rys. 5 przedstawia strukturę obwodu nieliniowego rezystancyjnego z diodami realizującego blok wartości
absolutnej.
Rys. 5 Struktura obwodu rezystancyjnego diodowego
*circuit
*: obwod diodowo-rezystancyjny abs(u1)
dd/diode/
r1 1 2 10k
re 2 3 10k
re1 3 0 0 e -5
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
7
r2 2 4 10k
r3 2 5 10k
td1 6 4 dd
td2 5 6 dd
rd1 5 8 100k
rd2 4 7 100k
rd3 7 0 100k
rd4 8 9 100k
qop 2=10 0=11 6=15 0 =0
*lib1 opamp
q*
qop 8=10 7=11 9=15 0 =0
*lib1 opamp
q*
rin 1 0 0 e 10
*time rin.e -10 15 0.2
*dc *probe v9
*run
*end
5. Przykład optymalizacji
Rys. 6a przedstawia model tranzystorowy diody tunelowej poddany optymalizacji, a rys. 6b charakterystykę
zadaną.
Rys. 6 Model diody tunelowej (a) i kształt zadanej charakterystyki prądowo-napięciowej
*circuit
*: Program optymalizacji w NAP
*list 7
:topologia obwodu
bcp107/npn/af 0.985
r1 1 2 20k
r2 2 0 1k
r3 1 3 100k
r4 4 0 4k
r5 5 0 1000
t1 3 2 4 bcp107
t2 1 3 5 bcp107
rin 11 0 0 e 1
rdiode 11 1 0
fzad/tab2/0 0 0.5 0.08m 1 0.39m 1.5 0.7m 1.7 0.85m 2 1.m 2.2 0.85m >
3 0.3m 3.2 0.33m 3.5 0.36m 4 0.4m 5 0.56m 6 0.8m 7 1.15m 8 1.6m
fdiode=1*fzad(vrin)
dif//a=1*irdiode b=-1
error=1*dif(fdiode)
*:analiza wstepna obwodu przed optymalizacja
*time rin.e 0 8 0.4
*dc *probe irdiode fdiode error
*run
*reset
*:proces optymalizacji
*time rin.e 0 8 0.4
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8
*optim r1 r2 r3 r4 r5
*dc irdiode=fdiode
*run ztole=1e-2 zprint=2 ziter=24
*reset
*:analiza obwodu po otymalizacji
*time rin.e -0.2 8 0.2
*dc *probe irdiode fdiode error
*run
*end
6. Przykład obwodu z tyrystorem
Rys. 7a przedstawia obwód RL z tyrystorem poddany analizie. Model obwodowy tyrystora przedstawiono na
rys. 7b, a jeden z możliwych wariantów sygnałów sterujących na rys.7c.
Rys. 7 Obwód z tyrystorami i model tyrystora przyjęty w analizie
*lib2 new : inicjalizacja biblioteki
*lib2 tyrystor +
: anoda -1
: bramka – 2
: katoda - 3
DE/diode/ gs 1000
td1 1 5 DE
td2 2 4 DE
rb 4 3 500
FIPOD/tab2/ -125 10m -10m 10m -9.9m 0.1m 9.9m 0.1m 10m 10m 125 10m
FRT/tab2/-15m 0.01 -8m 0.01 -7.9m 1meg 7.9m 1meg 8m 0.01 15m 0.01
rt 5 3 1*FRT(irb)
ipod 4 3 2*FIPOD(irt)
>
*circuit
*: obwod z tyrystorami
sin/sin/
DE/diode/gs 1000
rin 1 0 0 e=250*sin(314*time)
st1/tab2/p 20m 0 0 1.65m 0 1.66m 10 2.66m 10 2.67m 0 >
11.65m 0 11.66m 10 12.66m 10 12.67m 0 20m 0
st2/tab2/p 20m 0 0 4.99m 0 5m 10 6m 10 6.01m 0 14.99m 0 >
15m 10 16m 10 16.01m 0 20m 0
td1 3 1 DE
td2 3 0 DE
lload 2 4 0.25
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
9
rload 4 3 300
gst1 2 5 0 j 1*st2(time)
gst2 2 6 0 j 1*st2(time)
rtyr1 1 7 0
rtyr2 0 8 0
qop 7=1 5=2 2=3
*lib2 tyrystor
q*
qop 8=1 6=2 2=3
*lib2 tyrystor
q*
*time 0 40m 0.1m
*tr *probe vrload vlload irtyr1 irtyr2 v1
*run minstep 1e-6 trunc 1e-5
*end
7. Przykładowe zadania i problemy
Zadanie 1
Napisać program w NAP do analizy stanów nieustalonych w linii długiej bezstratnej w różnych warunkach
obciążenia (stan jałowy, zwarcia i obciążenia falowego). Przyjąć model drabinkowy (rys. 8).
0
1
1
0
2
2
1
3
k–1
k
3
2
n–1
k
3
k–1
n
n
k
n–1
k–1
Z2
n
k
R
L
G
C
k–1
k
Rys. 8 Model drabinkowy RLC linii długiej
Parametry jednostkowe: L0=1.8mH/km, C0=8nF/km, długość linii l=1000km. Model w postaci 14 czwórników
bezstratnych LC. Przy zmianach częstotliwości od 10Hz do 3kHz wykreślić charakterystyki częstotliwościowe
prądu wejściowego przy stałej amplitudzie napięcia wejściowego. Wykreślić rozkład napięcia wzdłuż linii dla
dwu różnych częstotliwości zasilania (długość fali odpowiadająca jednej długości linii i połówkowej długości
linii). Przeprowadzić analizę TR linii przy zasilaniu napięciem stałym.
Zadanie 2
Zaprojektować filtr bikwadratowy o zadanej strukturze (układ z wielopętlowym sprzężeniem zwrotnym o
transmitancji ogólnej podanej w punkcie 3, rys. 4) , układ KHN) i zadanych parametrach (filtr DP, SP, GP o
danej częstotliwości środkowej, dobroci i wzmocnieniu w paśmie). Przeprowadzić analizę AC, TR i analizę
wrażliwościową względem elementów pasywnych obwodu.
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
10
a)
b)
Rys. 9 Schematy filtrów: a) z wielopętlowym sprzężeniem zwrotnym oraz b) filtru KHN do zadania 2
W przypadku filtru KHN można wykorzystać wzór na transmitancje napięciowe układu w poszczególnych
punktach:
R2
C
C
R
R R
V
1 2
f1 f 2 g
TDP ( s ) 5
U we
M ( s)
TSP ( s)
V4
U we
s
R2
C1 R f 1 Rg
M ( s)
R
s2 2
Rg
V3
TGP ( s)
U we
M ( s)
w których mianownik M(s) jest wielomianem drugiego stopnia określonym wzorem (konduktancje G są
odwrotnością odpowiednich rezystancji obwodu)
M ( s) s 2 s
R2 (G1 G2 Gg )
C1 R1 R f 1 (G3 GQ )
R2
C1C2 R1 R f 1 R f 2
Z porównania odpowiadających sobie wzorów ogólnych na transmitancję bikwadratową i ich szczegółowej
implementacji można łatwo określić wartości nastaw poszczególnych elementów pasywnych RC obwodu.
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
11
Zauważmy, że
R2
C1C2 R1 R f 1 R f 2
0
R f 1C1
R
1
Q 1 3
R 1 / R 1 / R 1 / R R R R C
Q
1
2
g
1 2
f2 2
ADP
R1
Rg
R
1
ASP 1 3
R 1 R / R R / R
Q
g
1
g
2
AGP
R2
Rg
Projektując dowolny spośród trzech wymienionych wyżej filtrów w strukturze KHN, realizujemy jednocześnie
dwa pozostałe o identycznej dobroci Q i częstotliwości środkowej ω0 .. Projektowanie filtru sprowadza się do
takiego doboru wartości elementów, aby zrealizować zadane wartości dobroci, częstotliwości środkowej oraz
wzmocnienia. Należy więc rozwiązać układ równań wynikający z powyżej podanych wzorów. Procedura
obliczeniowa znacznie się upraszcza, jeśli przyjmie się dodatkowe założenia:
C1 C2 C
Rf 1 Rf 2 Rf
R1 R2 R3 R
Przy takich założeniach wzory projektowe upraszczają się do
Rf
1
0C
1
2f 0C
Rg
R
ADP
RQ
R
2Q QR / Rg 1
lub
Rg
R
AGP
lub
Rg
RQ
AS P
Wartości rezystancji R i pojemności C przyjmuje się dowolnie, odpowiednio do wymagań użytkownika (np.
R=10kΩ, C=1nF.
Zadanie 3
Badanie stanu nieustalonego w obwodzie nieliniowym R, psi, C (rys. 10) o zadanej nieliniowości cewki
(wykorzystać funkcję TAB2). Przyjąć charakterystykę magnesowania cewki na rdzeniu magnetycznym jak w
poniższej tabeli
Tabela 1 Krzywa magnesowania cewki o rdzeniu magnetycznym (pierwsza ćwiartka układu współrzędnych)
I [A] 0
0,1
0,2
0,3
0,4
0,5
0.6
1
2
4
Ψ [Wb 0
2E-2
6e-2
10e-2
12E-2 12,5E-2 12,7E-2 12.9E-2 13E-2 13,1E-2
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
12
Rys. 10 Schemat obwodu RψC do zadania 3
Zadanie 4
Napisać program analizy DC wybranych obwodów nieliniowych rezystancyjnych z diodami i wzmacniaczami
operacyjnymi rys. 11).
Rys. 11 Struktury elementarnych obwodów nieliniowych diodowych oraz ich charakterystyki
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
13
W oparciu o nie zaprojektować złożony obwód nieliniowy realizujący wybrany typ charakterystyki nieliniowej z
rys. 12. Projektując obwód należy zdekomponować zadaną charakterystykę nieliniową na szereg charakterystyk
prostych odpowiadających elementarnym obwodom z rys. 11. W przypadku charakterystyk prąd-napięcie
dekompozycja charakterystyk odpowiada równoległemu połączeniu obwodów elementarnych. W przypadku
charakterystyk napięcie-napięcie dekompozycja charakterystyk odpowiada sumie napięć wyjściowych
poszczególnych obwodów elementarnych, która można zrealizować przy pomocy sumatora na wzmacniaczu
operacyjnym.
Rys. 12 Przykłady charakterystyk nieliniowych typu złożonego
Zadanie 5
Napisać program analizy AC podstawowych układów aktywnych (człon całkujący i różniczkujący, przesuwnik
fazowy, FDNR) z rys. 13. Zaprojektować układy o zadanych parametrach. Zbadać odpowiedzi czasowe na
wymuszenie prostokątne i trójkątne. Projektując odpowiednie układy można przyjąć idealność wzmacniacza
operacyjnego. Przy założeniu idealności wzmacniaczy operacyjnych poszczególne układy charakteryzowane są
przy pomocy następujących transmitancji
Człon całkujący
T ( s)
RC
sRR C C R
Człon różniczkujący
T ( s ) RCs
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
14
Przesuwnik fazowy
T ( s)
sC 1 / r
sC 1 / r
Element FDNR (Frequency Dependent Negative Resistor)
Ywe ( s ) s 2
C1C5 R2 R4
R3
Rys. 13 Struktury układów aktywnych do zadania 5
Zadanie 6
Badanie stanów nieustalonych w obwodach RLC z tyrystorami (analiza TR): obwód jednofazowy RC, RL,
RLC, obwód trójfazowy jednopołowkowy.
8. Przykładowy projekt do wykonania
Przygotować program w PCNAP do wybranego rodzaju analizy obwodu elektrycznego (analiza
TR, AC, DC) wskazanego przez prowadzącego zajęcia. Może być to jedno z wymienionych wyżej
zadań lub inne zadanie wskazane przez prowadzącego zajęcia. Obwód ten należy wcześniej
zaprojektować według podanych specyfikacji.
Przeprowadzić wskazane rodzaje analizy obwodu. W przypadku obwodów liniowych
dynamicznych określić odpowiedź impulsową obwodu oraz charakterystyki częstotliwościowe dla
wybranych zacisków wyjściowych tego obwodu.
Zanotować wybrane wyniki analizy obwodu w formie numerycznej (jeśli tak wskaże prowadzący)
lub graficznej (wskazane przez prowadzącego wykresy).
Przygotować sprawozdanie z projektu zawierające:
Treść zadania z podanymi specyfikacjami wymagań
Obliczenia projektowe (jeśli zadanie zawierało również część projektową)
Schemat graficzny obwodu
Wydruk programu w języku PCNAP przygotowanego przez studenta
Odpowiednie wyniki graficzne i numeryczne przeprowadzonych analiz obwodu uzyskane z
postprocesora graficznego PROBE
Porównanie wyników z założeniami projektowymi
Wnioski wynikające z przeprowadzonych analiz.
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
15
9. Literatura
1.
2.
3.
4.
5.
6.
S. Osowski, K. Siwek, M. Śmiałek, Teoria obwodów, OWPW, Warszawa, 2006
S. Osowski, Wybrane zagadnienia teorii obwodów, Oficyna Wydawnicza PW, 2011
K. Mikołajuk, Podstawy analizy obwodów energoelektronicznych, PWN, Warszawa, 1998
S. Osowski, A. Toboła, Analiza i projektowanie komputerowe obwodów, Oficyna Wydawnicza PW,
Warszawa, 1997
G. Temes, S. K. Mitra, Teoria i projektowanie filtrów, WNT, Warszawa, 1978
S. A. Pactitis. Active filters – theory and design, CRC, 2008 (Bibl. PW C135030, J5)
Projekt jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
16