KOLEGIUM KARKONOSKIE
Państwowa WyŜsza Szkoła Zawodowa
w Jeleniej Górze
mgr inŜ. Aleksander Dziuda
mgr inŜ. Waldemar Krupa
LABORATORIUM
TECHNIKI CYFROWEJ
JELENIA GÓRA 2006
PRZEWODNICZĄCY RADY
PROGRAMOWO - WYDAWNICZEJ
dr hab. Henryk GRADKOWSKI
RECENZENT
prof. dr hab. inŜ. Jan Jagielski
Niniejsze wydawnictwo moŜna kupić w Bibliotece Uczelnianej
Kolegium Karkonoskiego PWSZ
w Jeleniej Górze
ul. Lwówecka 18
tel. 0 75 645 33 52
Druk i oprawa: INTROLIGATORSTWO - MAŁA POLIGRAFIA
58-503 ul. PodchorąŜych 1/6
tel. 0 75 6474006
tel. kom. 0 501 181516
ISBN 83-912031-7-4
ISBN 978-83-912031-7-0
SPIS TREŚCI
OD AUTORÓW. .................................................................................... 5
1. REGULAMIN LABORATORIUM TECHNIKI CYFROWEJ. .......... 7
2. MAKIETA LABORATORYJNA ML-1. ........................................... 19
2.1. Struktura sprzętowa systemu. ...................................................... 19
2.1.1. Moduł układów cyfrowych. ................................................. 20
2.1.2. Tryby pracy mikroprocesorowego sterownika systemu. ..... 24
2.1.3. Zasilacz. ............................................................................... 27
2.1.4. Inne elementy. ...................................................................... 27
2.2. Program „Makieta laboratoryjna 1.0”. ......................................... 28
2.2.1. Interfejs uŜytkownika. .......................................................... 28
2.2.2. Komunikaty występujące w programie. .............................. 34
2.2.3. Pomoc programu. ................................................................. 37
3. ĆWICZENIA LABORATORYJNE. .................................................. 39
3.1. Cele kształcenia. ........................................................................... 39
3.2. Charakterystyka ćwiczeń. ............................................................ 39
3.2.1. Wprowadzenie do ćwiczeń laboratoryjnych, wymagania,
literatura, zasady BHP. ........................................................ 40
3.2.2. Zapoznanie się z makietą laboratoryjną, moŜliwościami,
właściwościami, oprogramowaniem sterownika. ................ 40
3.2.3. Podstawowe elementy logiczne rodziny 74 LS. ................... 41
3.2.4. Układy konwersji kodów. ..................................................... 43
3.2.5. Układy komutacyjne. ............................................................ 44
3.2.6. Rejestry równoległe i przesuwne. ......................................... 46
3.2.7. Liczniki asynchroniczne. ...................................................... 48
3.2.8. Liczniki synchroniczne. ........................................................ 49
3.2.9. Układy arytmetyczne. ........................................................... 50
3.2.10. Termin obróbczy. ................................................................ 53
3.3. Elementy logiczne i bloki funkcjonalne występujące na stanowisku laboratoryjnym. ............................................................. 54
3.3.1. Podstawowe oznaczenia graficzne. ....................................... 54
3.3.2. Wykaz układów scalonych 74LS serii TTL dostępnych
na stanowisku laboratoryjnym. ............................................ 57
3.3.3. Funkcje układów scalonych 74LS występujących na stanowisku laboratoryjnym. ..................................................... 58
3.3.4. Wyciąg z not katalogowych układów scalonych 74LS
występujących na stanowisku laboratoryjnym. ................... 61
3.4. Literatura do ćwiczeń laboratoryjnych. ........................................ 76
4. NARZĘDZIA WSPOMAGAJĄCE PROJEKTOWANIE UKŁADÓW CYFROWYCH W STRUKTURACH PLD. .......................... 77
4.1. Programy systemu WinCUPL. ..................................................... 77
4.2. Podstawy języka CUPL. ............................................................... 79
4.2.1. Elementy języka i składnia. ................................................. 80
4.2.2. Preprocesor. ........................................................................ 104
4.2.3. Opis automatów. ................................................................ 107
4.2.4. Format pliku źródłowego. .................................................. 110
4.3. Program WinCUPL. ................................................................... 115
4.3.1. Obsługa WinCUPL. ........................................................... 116
4.3.2. Praca z przykładowym projektem. ..................................... 126
4.3.3. Pierwszy program. ............................................................. 132
4.4. Programator LabTool-48XP. ...................................................... 146
4.3.1. Praca z programatorem. ..................................................... 149
4.3.2. Programowanie układu. ..................................................... 153
4.5. Literatura do rozdziału 4. ........................................................... 157
4
OD AUTORÓW
Niniejsze opracowanie jest przeznaczona dla studentów przygotowujących się i wykonujących ćwiczenia laboratoryjne w ramach przedmiotów
„Technika cyfrowa” na kierunku ELEKTRONIKA I TELEKOMUNIKACJA
oraz „Elektrotechnika i elektronika” z zakresu układów cyfrowych na kierunku EDUKACJA TECHNICZNO-INFORMATYCZNA, prowadzonych w Instytucie Techniki Kolegium Karkonoskiego.
Przyjmuje się, Ŝe studenci znają działanie i właściwości projektowanych
układów logicznych z informacji przekazywanych na wykładach i ćwiczeniach audytoryjnych poprzedzających zajęcia laboratoryjne.
Opracowanie zawiera Regulamin Laboratorium Techniki Cyfrowej, opis
Makiety Laboratoryjnej ML-1 na której realizowane są ćwiczenia laboratoryjne oraz programu „Makieta laboratoryjna 1.0”, materiały poświęcone kaŜdemu ćwiczeniu i opis narzędzi wspomagających projektowanie układów cyfrowych w strukturach PLD.
W regulaminie laboratorium określono cel ćwiczeń laboratoryjnych, zasady przygotowania się i zaliczenia ćwiczeń oraz wskazówki o sposobie wykonania sprawozdań z ćwiczeń. Ponadto przedstawiono podstawowe zasady
BHP obowiązujące w Laboratorium Techniki Cyfrowej podczas wykonywania ćwiczeń.
5
Materiały poświęcone kaŜdemu ćwiczeniu obejmują charakterystykę badanych układów, proponowany program ćwiczenia oraz przykładowe problemy do samodzielnego rozwiązania.
Narzędzia wspomagające projektowanie układów cyfrowych w strukturach PLD zapoznają z podstawami języka CUPL, programami systemu WinCUPL oraz programatorem LabTool-48XP.
Informacje zawarte w pracy pozwalają na wykonanie ćwiczeń zgodnie
z podanym programem. Załączony spis literatury powinien zachęcić studentów do samodzielnego pogłębiania i rozszerzania swojej wiedzy z zakresu
Techniki Cyfrowej.
6
1. REGULAMIN
LABORATORIUM TECHNIKI CYFROWEJ
Laboratorium z Techniki Cyfrowej jest ilustracją wykładów i ćwiczeń
audytoryjnych o tym samym tytule, prowadzonych w Instytucie Techniki Kolegium Karkonoskiego.
Zajęcia laboratoryjne mają na celu:
Praktyczną weryfikację, ugruntowanie i poszerzenie nabytej wiedzy
teoretycznej oraz kształtowanie praktycznych umiejętności wykorzystania scalonych układów cyfrowych, poprawnego odczytywania wyników i prowadzenia odpowiedniej dokumentacji pomiarów.
Kształtowanie umiejętności metrologicznych, takich jak: prawidłowe
zaplanowanie pomiarów, celem przeprowadzenia doświadczenia, poprawna organizacja stanowiska pomiarowego i właściwa eksploatacja
aparatury oraz ocena i dyskusja wyników pod względem ich wiarygodności.
Zapoznanie studentów z elementami cyfrowymi klasy TTLS, stosowanymi strukturami układów cyfrowych, a takŜe metodyką projektowania
urządzeń cyfrowych na poziomie stosowania bloków funkcjonalnych.
Oczekuje się, Ŝe uczestnictwo w zajęciach pozwoli studentom na wykonywanie samodzielnych projektów z uŜyciem układów cyfrowych oraz interpretację i dyskusję otrzymanych wyników w trakcie badań.
7
Podstawą przygotowania się do ćwiczeń laboratoryjnych są wiadomości
nabyte przez studentów podczas wykładów i ćwiczeń audytoryjnych w ramach kursów „Technika cyfrowa I” i „Technika cyfrowa II” oraz korzystanie
z dostępnej, obowiązkowej i zalecanej literatury. Realizacja ćwiczeń laboratoryjnych, to samodzielna działalność i podejmowanie decyzji przez studentów
w trakcie wykonywania ćwiczeń.
Przygotowanie się studentów do ćwiczeń laboratoryjnych polega na:
zapoznaniu się z tematem i celem ćwiczenia,
przyswojeniu teoretycznych podstaw zachodzących w badanych układach,
poznaniu zasad badania określonych zjawisk i wynikającego z niej
układu,
określeniu przewidywanych efektów pomiarów (charakterystyk, wyników, itp.),
przyswojeniu sobie wiadomości dotyczących budowy i zasady działania uŜytych w ćwiczeniu przyrządów pomiarowych,
przygotowaniu protokołu pomiarów (tabelki, schematy, wstępne obliczenia).
KaŜdy student przed rozpoczęciem ćwiczeń laboratoryjnych obowiązany
jest zapoznać się z Regulaminem Laboratorium Techniki Cyfrowej oraz Przepisami BHP obowiązującymi w laboratorium, co winno być udokumentowane
podpisem.
Studenci wykonują ćwiczenia w Laboratorium Techniki Cyfrowej w podgrupach składających się z zespołów dwuosobowych lub w szczególnych
przypadkach trzyosobowych pod kierunkiem pracownika Instytutu Techniki.
Ćwiczenia wykonywane są w systemie całościowym, tzn. ustawiony jest
w laboratorium jeden temat ćwiczeń, realizowany przez wszystkie podgrupy.
8
Podgrupy laboratoryjne wykonują ćwiczenie według ustalonego przez prowadzącego schematu.
Po wykonaniu kaŜdego etapu ćwiczenia naleŜy uzyskane wyniki zaprezentować prowadzącemu w celu sprawdzenia i potwierdzenia realizacji programu.
KaŜda podgrupa laboratoryjna prowadzi jeden protokół, w którym notuje
wyniki pomiarów, uwagi dotyczące przebiegu ćwiczenia, schematy połączeń,
obliczenia oraz polecenia prowadzącego zajęcia dotyczące danego ćwiczenia.
Zatwierdzenie protokołu oznacza zaliczenie części praktycznej danego ćwiczenia. W sprawozdaniu zawarte winny być tylko wyłącznie wyniki
z zatwierdzonego protokołu.
Studenci przedstawiają sprawozdanie z ćwiczenia w formie pisemnej.
Szczegółowe zasady wykonywania sprawozdania określa prowadzący kurs.
Sprawozdanie, wraz z zatwierdzonym protokołem pomiarów, studenci
mają obowiązek przedstawić prowadzącemu do oceny na następnych zajęciach. W przypadku niespełnienia tego warunku studenci nie są dopuszczoni
do wykonywania ćwiczenia.
W ciągu semestru odbywa się 8 ćwiczeń (8 spotkań). KaŜde ćwiczenie
trwa 3 godziny lekcyjne. Pierwsze spotkanie organizacyjne stanowi wprowadzenie oraz dokonywany jest podział na podgrupy laboratoryjne. Dziesiąte
spotkanie przeznaczone jest na ewentualne odrobienie zaległego ćwiczenia.
W przypadkach usprawiedliwionej nieobecności na ćwiczeniach istnieje
moŜliwość odrobienia ćwiczenia z inną grupą laboratoryjną, jeŜeli będą wolne
miejsca. Przypadek taki naleŜy uzgodnić z prowadzącym ćwiczenia w danej
grupie.
W czasie ćwiczenia obowiązuje znajomość instrukcji oraz teorii z wykładu i ćwiczeń audytoryjnych obejmujących tematykę ćwiczenia.
9
W przypadku niedostatecznego przygotowania teoretycznego prowadzący
moŜe niedopuścić studenta do wykonywania ćwiczenia. Przypadek taki jest
równoznaczny z nieobecnością nieusprawiedliwioną.
Student, który nie został dopuszczony do wykonywania ćwiczenia ma
prawo uczestniczyć w wykonywaniu ćwiczenia, jednak bez moŜliwości oddania protokołu i sprawozdania. Takie ćwiczenie musi być powtórzone w czasie
wyznaczonym przez prowadzącego w ramach limitu nieobecności nieusprawiedliwionych.
W przypadku raŜąco nieudolnego wykonywania ćwiczenia, nieumiejętnego posługiwania się sprzętem laboratoryjnym, niszczenia sprzętu pomiarowego a takŜe innego wyposaŜenia laboratorium lub innego postępowania
szkodliwego z punktu widzenia pozostałych osób korzystających z laboratorium studenci mogą zostać usunięci z laboratorium.
Sposób oceniania wykonania ćwiczenia przez studentów jest przedstawiany przez prowadzącego w czasie zajęć wprowadzających do ćwiczeń laboratoryjnych.
W laboratorium obowiązuje następujący regulamin:
1. Płaszcze i inne okrycia wierzchnie naleŜy pozostawić w szatni.
2. W laboratorium naleŜy zachować ciszę. Konwersację z innymi studentami naleŜy ograniczyć do niezbędnego minimum i prowadzić głosem ściszonym, tak aby nie zakłócić ciszy i nie rozpraszać pozostałych ćwiczących.
3. Nie wolno samowolnie zamieniać ani przenosić przyrządów oraz korzystać ze sprzętu laboratoryjnego nie wchodzącego w zestaw danego ćwiczenia.
4. Modelowania realizowanych w ramach ćwiczeń laboratoryjnych projektów układów studenci dokonują uŜywając wyłącznie układów scalonych
znajdujących się na danym stanowisku laboratoryjnym.
10
5. Studenci mogą włączać napięcia zasilające oraz włączać i wyłączać komputery wyłącznie za zgodą prowadzącego.
6. Studenci są zobowiązani do zachowania szczególnej ostroŜności w uŜytkowaniu przyrządów i komputerów. O wszelkich uszkodzeniach naleŜy
natychmiast powiadomić prowadzącego zajęcia.
7. Winni zniszczenia lub uszkodzenia układu wskutek samowolnego włączenia napięcia lub niestosowania się do wskazówek prowadzącego ćwiczenia – będą usuwani z zajęć.
8. Rozłączenie badanego układu tak w trakcie ćwiczenia jak i po zakończeniu pomiarów jest dozwolone po zatwierdzeniu wyników przez prowadzącego ćwiczenie.
9. Po wykonaniu ćwiczenia studenci wykonują jedno sprawozdanie na podgrupę.
10. Zaliczenie ćwiczeń laboratoryjnych następuje na podstawie;
wykonania wszystkich ćwiczeń przewidzianych programem laboratorium,
zaliczenia sprawozdań ze wszystkich wykonanych w laboratorium
ćwiczeń.
11. Zabrania się dokonywania jakichkolwiek zmian w konfiguracji systemu
Windows 98SE (dotyczy to równieŜ pulpitu!) i w zainstalowanych programach.
12. Zakazuje się wgrywania, „ściągania” z Internetu oraz instalowania oprogramowania na komputerach znajdujących się w laboratorium.
13. Zabrania się tworzenia nowych katalogów oraz wgrywania plików do
komputerów znajdujących się w laboratorium.
14. Nie wolno umieszczać na pulpicie systemu Windows 98SE Ŝadnych skrótów, folderów czy plików.
11
15. W trakcie zajęć zabrania się z korzystania z Internetu (przeglądarek
WWW, poczty elektronicznej, a szczególnie z usług typu: Gadu-Gadu,
IRC, Chat, itp.). MoŜna korzystać z przeglądarek WWW w przypadku,
gdy jest to wymagane do zaliczenia danego ćwiczenia.
16. Wykonując dane ćwiczenie naleŜy pracować wyłącznie w katalogu roboczym wskazanym w instrukcji tego ćwiczenia i zgodnie z tą instrukcją.
Celem uniknięcia nieszczęśliwym wypadkom naleŜy przestrzegać następujących zasad (wyciąg z instrukcji BHP):
1. Pracę na stanowiskach laboratoryjnych powinna cechować szczególna
ostroŜność i rozwaga.
2. Przed przystąpieniem do łączenia układu pomiarowego, naleŜy sprawdzić
czy źródła zasilania są odłączone.
3. Zabrania się uŜywania przewodów łączących z uszkodzoną izolacją lub
oberwanymi końcówkami.
4. Zabrania się włączenia napięcia bez sprawdzenia układu przez prowadzącego ćwiczenia i uzyskania jego zgody.
5. Wszystkie zmiany w układzie, jak równieŜ jego rozłączenie jest dozwolone jedynie przy odłączeniu napięcia.
6. Włączenie napięcia po dokonanej zmianie w układzie moŜe nastąpić dopiero po sprawdzeniu układu przez prowadzącego ćwiczenia.
7. Zabrania się dotykać części elementów układu znajdującego się pod napięciem, a w szczególności zacisków przyrządów i końcówek przewodów łączących.
8. W razie odłączenia źródeł zasilania przez bezpiecznik automatyczny,
znajdujący się na listwie zasilającej, naleŜy niezwłocznie powiadomić
o tym fakcie prowadzącego ćwiczenia.
9. W przypadku poraŜenia prądem elektrycznym naleŜy:
12
natychmiast wyłączyć napięcie zasilające za pomocy wyłącznika
głównego lub wyłączników znajdujących się na listwach zasilających,
uwolnić poraŜonego spod działania prądu elektrycznego,
powiadomić prowadzącego ćwiczenia oraz lekarza,
przystąpić do udzielenia pierwszej pomocy zgodnie z zasadami
udzielania pomocy w przypadku poraŜenia prądem,
poddać poszkodowanego opiece lekarskiej, niezaleŜnie od tego czy
stracił przytomność czy nie.
11. W razie poŜaru naleŜy:
wyłączyć napięcie zasilające,
nieść pomoc osobom zagroŜonym, zachować spokój, nie wywoływać paniki,
przystąpić do gaszenia poŜaru za pomocy dostępnych środków gaśniczych, np.: kocy gaśniczych, gaśnic. Uwaga! do gaszenia urządzeń elektrycznych nie wolno uŜywać gaśnic pianowych,
powiadomić straŜ poŜarną – telefon 998,
studenci, którzy nie biorą udziału w akcji ratowniczej muszą bezwzględnie opuścić laboratorium.
12. W razie powstania innego wypadku (urazy mechaniczne, chemiczne, itp.)
naleŜy:
usunąć czynniki szkodliwe,
zawiadomić o wypadku pracownika prowadzącego ćwiczenia,
udzielić pierwszej pomocy,
w razie potrzeby wezwać lekarza, ewentualnie przewieźć poszkodowanego do szpitala.
13
UWAGA!
Wykonując ćwiczenie PRZESTRZEGAJ przepisów BHP związanych
z obsługą urządzeń elektrycznych.
Uszkodzenia bądź nieprawidłowości w funkcjonowaniu urządzeń
ZGŁOŚ prowadzącemu zajęcia. Urządzenia uszkodzone ODSTAW
w miejsce z opisem “Urządzenia uszkodzone”.
Po wykonaniu ćwiczenia laboratoryjnego:
∗ ROZŁĄCZ
badane układy,
∗ WYŁĄCZ
zasilanie urządzeń i stołu,
∗ UŁÓŹ
przewody w uchwytach,
∗ ODSTAW
urządzenia przestawione z innych stanowisk
na ich pierwotne miejsce.
14
Zalecany układ sprawozdania:
tabela nagłówkowa sporządzona według wzoru;
KOLEGIUM KARKONOSKIE
INSTYTUT TECHNIKI
LABORATORIUM TECHNIKI CYFROWEJ
Numer grupy:
Skład podgrupy:
1.
2.
Numer ćwiczenia:
Temat ćwiczenia:
Prowadzący:
Data wykonania: Ocena:
Podpis:
cel ćwiczenia;
rozwiązania zadań otrzymanych w ramach przygotowania się do ćwiczeń laboratoryjnych;
schematy połączeń zaprojektowanych układów faktycznie stosowanych
w ćwiczeniu;
tabele z wynikami badań i obliczeń;
wzory stosowane do obliczeń i obliczenia;
przebiegi czasowe;
wnioski i uwagi z przebiegu ćwiczenia i otrzymanych wyników.
Oceniając sprawozdanie bierze się pod uwagę:
poprawność otrzymanych wyników i wykresów;
stopień wyczerpania tematu we wnioskach;
staranność wykonania schematów, tabel i wykresów.
15
Uwaga: do sprawozdania winien być dołączony protokół z pomiarów
zawierający:
krótką charakterystykę przeprowadzonych badań, uwzględniając
cel ćwiczenia oraz zastosowaną metodę pomiaru;
dyskusję otrzymanych wyników i analizę wykonanych wykresów
w oparciu o teoretyczne uzasadnienie zjawisk;
uwagi i spostrzeŜenia poczynione w trakcie ćwiczenia.
Sprawdzone i zaliczone sprawozdania przechowywane są do końca semestru przez prowadzących zajęcia laboratoryjne.
Zasady zaliczenia laboratorium
Ustala się następujące zasady zaliczenia laboratorium:
1. Zaliczenie wszystkich ćwiczeń laboratoryjnych przewidzianych programem studiów.
2. Dopuszczalna jest nieobecność na dwóch ćwiczeniach pod warunkiem
ich wykonania w wyznaczonych terminach odróbczych.
Liczba nieobecności przewyŜszająca 2 będzie traktowana zgodnie
z regulaminem studiów Kolegium Karkonoskiego.
3. Ocena końcowa będzie wyznaczona jako średnia arytmetyczna ocen
cząstkowych uzyskanych z kaŜdego ćwiczenia.
4. Ocenie moŜe podlegać aktywność studentów podczas laboratorium.
Ad.1. Warunkiem zaliczenia ćwiczenia jest:
a) Przygotowanie do ćwiczenia, zgodne z wykazem materiału obowiązującego wykazanego w instrukcji do ćwiczenia.
16
b) Pozytywna ocena ze sprawdzianu weryfikującego przygotowanie do
ćwiczenia (jeśli ćwiczenie zostało objęte sprawdzianem).
Dopuszcza się przeprowadzenie kolokwium z zakresu materiału
obejmującego wykonane ćwiczenia w terminie ustalonym z co najmniej 14 dniowym wyprzedzeniem oraz po uzgodnieniu wagi jego
oceny. Zaliczenie tematyki ćwiczenia moŜe nastąpić w trakcie wykonywania ćwiczenia lub poprzez kolokwium po kaŜdej serii ćwiczeń
c) Rozliczenie sprawozdania z ćwiczenia poprzedniego.
d) Uzyskanie pozytywnej oceny z wykonywania ćwiczenia.
Uwaga:
Niespełnienie warunków, o których mowa w punktach a) - d), moŜe spowodować usunięcie ćwiczącego z zajęć i równoczesne wykreślenie z listy
obecności w danym dniu.
17
2. MAKIETA LABORATORYJNA ML-1
2.1.
Struktura sprzętowa systemu
Rys. 2.1. Widok stanowiska laboratoryjnego
Stanowisko laboratoryjne w przedstawionej powyŜej konfiguracji (rysunek 2.1) przeznaczone jest do wykonywania ćwiczeń laboratoryjnych z
„Techniki cyfrowej” na kierunku ELEKTRONIKA I TELEKOMUNIKACJA
oraz „Elektrotechniki i elektroniki” z zakresu układów cyfrowych na kierunku
EDUKACJA TECHNICZNO-INFORMATYCZNA.
19
Do właściwych zasobów sprzętowych systemu naleŜą:
∗ Moduł układów cyfrowych wraz z mikroprocesorowym sterownikiem
systemu;
∗ Komputer klasy PC wraz z oprogramowaniem;
∗ Zasilacz;
∗ Inne elementy: zestaw układów scalonych klasy TTLS, przewody połączeniowe.
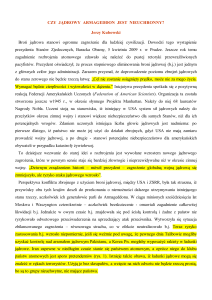
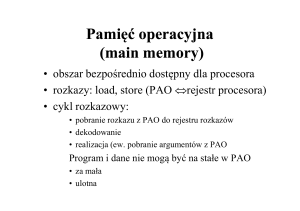
2.1.1. Moduł układów cyfrowych
Moduł układów cyfrowych jest uniwersalnym układem zawierającym
podstawowe elementy umoŜliwiające szybkie zamodelowanie badanego układu cyfrowego i dokonanie niezbędnych prób. SłuŜy do modelowania układów
cyfrowych projektowanych oraz badanych w ramach ćwiczeń laboratoryjnych. Wygląd modułu przedstawia rysunek 2.2.
Moduł zawiera następujące elementy:
1. 4 podstawki 16 nóŜkowe zerowego docisku (TEXTOOL);
2. 1 podstawkę 40 nóŜkową zerowego docisku (TEXTOOL);
3. 10 diod elektroluminescencyjnych LED zespolonych w jednym bloku;
4. 7-segmentowy wskaźnik cyfrowy;
5. mikroprzełącznik DIP Switch 8-bitowy;
6. pola sygnałów zerojedynkowych i sygnałów impulsowych:
o monitorowanie wyjść;
o fala prostokątna;
o tryb pracy;
o wektor wejść;
o generator impulsów;
7. mikroprocesorowy sterownik systemu;
8. złącze zasilające;
9. łącze szeregowe (RS – 232).
20
Rys. 2.2. Moduł układów cyfrowych.
Moduł układów cyfrowych jest zasilany napięciem stabilizowanym + 5V.
KaŜda podstawka (1, 2) pod układ scalony ma wyprowadzone wszystkie
nóŜki na zgrupowane wokół niej szpilki. Zasilanie układu scalonego włoŜonego do podstawki moŜna dołączyć w sposób elastyczny, zaleŜnie od typu,
wykorzystując szpilki zasilania GND i +5V doprowadzone bezpośrednio
w pobliŜe podstawki. Dźwigienka dociskowa umoŜliwia łatwą wymianę
układu scalonego.
Zespolone diody LED (3) (linijka 10-diodowa koloru białego) słuŜą do
bezpośredniej obserwacji stanów logicznych badanego układu (max. 10
wejść/wyjść). Sygnałem aktywnym (świecenie diody) jest poziom niski LOW
– odpowiada to 0 logicznemu.
Wskaźnik 7-segmentowy (4) umoŜliwia badanie układów transkoderów
kodu BCD (lub innych) na kod wskaźnika. Poszczególne segmenty wskaźnika
21
zostały oznaczone literami a, b, c, d, e, f, g, h. Sygnałem aktywnym (świecenie segmentu) jest poziom niski LOW.
Mikroprzełącznik 8-segmentowy (5) umoŜliwia dołączenie, zaleŜnie od
potrzeb, stanów logicznych 0 i 1 (poziomów LOW i HIGH). Odpowiadające
tym stanom poziomy napięć generowane są na wyjściach 1 – 8 mikroprzełącznika stosownie do ustawiania odpowiedniego segmentu.
UWAGA: w pozycji 1 segmentu na stosownym wyjściu pojawia się poziom HIGH (1 logiczna), a w pozycji 0 segmentu na wyjście
dołączony jest poziom LOW (0 logiczne).
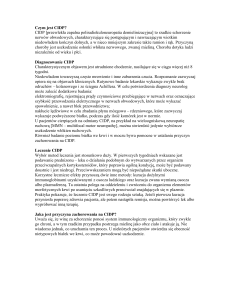
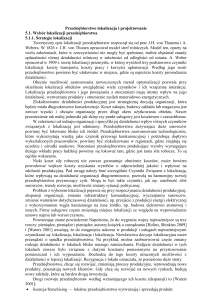
Pola sygnałów zerojedynkowych i sygnałów impulsowych (6) ilustrują
stan i pracę mikroprocesorowego sterownika systemu (rysunek 2.3):
tryby pracy,
wektora stanów wejściowych,
generatora impulsów,
falę prostokątna,
monitorowanie wyjść.
Rys. 2.3. Pole sygnałów związanych ze sterownikiem.
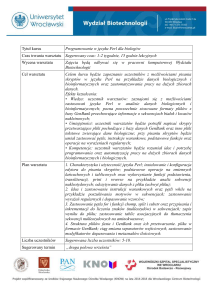
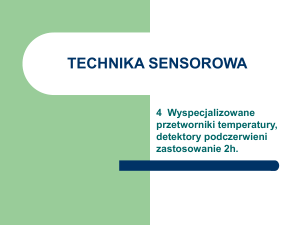
Mikroprocesorowy sterownik systemu (7) stanowi rozwiązanie na bazie
mikrokontrolera AT89C51. Tworzą go dwa elementy: elektroniczny sterow22
nik makiety układów cyfrowych oraz rezydujące w komputerze PC oprogramowanie. Oprogramowanie praktycznie steruje całą pracą elektronicznego
sterownika.
Sterownik systemu, przedstawiony na rysunku 2.4, umoŜliwia programową
realizację podstawowych funkcji niezbędnych do badania modelowanych
struktur cyfrowych.
8
9
Rys. 2.4. Mikroprocesorowy sterownik systemu.
Sterownik sprzęgany jest z makietą układów cyfrowych za pomocą trzech
złącz – J1, J2 i J3.
Złącze zasilające (8) doprowadza napięcie zasilające do makiety oraz mikroprocesorowego sterownika systemu z zasilacza modułu układów cyfrowych.
Łącze szeregowe RS – 232 (9) odpowiada za współpracę PC z interfejsem
sterownika.
23
2.1.2. Tryby pracy mikroprocesorowego sterownika systemu
Tryb ręczny
Ustalona wartość wektora pojawia się na wyjściach dopiero po zaakceptowaniu i obowiązuje do następnej akceptacji (jedna operacja).
∗ Wektor 10-bitowy kodu „1 z10”:
- przesuwanie „1” - aktywny poziom wysoki [HIGH];
- przesuwanie „0” - aktywny poziom niski [LOW].
∗ Wektor bitowy o zmiennej długości – swobodne ustalenie wartości
wektora przez ustawienie pojedynczego bitu ∈{0,1}. Długość wektora z zakresu od 2 do 8 bitów.
∗ Wektor 5-bitowy licznikowy:
- opcja zliczanie w przód w NKB (inkrementacja);
- opcja zliczania w tył w NKB (dekrementacja).
Tryb automatyczny
Zmiana wartości wektora i jego akceptacja dokonywane są automatycznie
(przez program) po upływie czasu t, spójny zakres zmian wartości wektora.
Wybór tej opcji powoduje automatyczne cykliczne generowanie wartości
wektora i jego akceptację po czasie t. Czas t jest wybieralnym parametrem
w menu trybu pracy, t ∈{1s, 2s, 4s}.
∗ Wektor 10-bitowy kodu „1 z10”:
- przesuwanie „1” - aktywny poziom wysoki [HIGH];
- przesuwanie „0” - aktywny poziom niski [LOW].
∗ Wektor 5-bitowy licznikowy:
- opcja zliczanie w przód w NKB (inkrementacja);
- opcja zliczania w tył w NKB (dekrementacja).
Generator pojedynczych impulsów.
∗ generator zadanej liczby impulsów:
24
− generuje zaprogramowaną liczbę impulsów z zakresu od 2 do
255 na jednym programowo wyróŜnionym wyjściu, z wybraną
częstotliwością f. Na wyjściu drugim - stały, ustawiany programowo, poziom napięcia (LOW lub HIGH);
− częstotliwość f wybierana programowo o wartościach 1Hz, 1kHz.
∗ generator pojedynczych impulsów:
− dwa funkcjonalnie zróŜnicowane wyjścia: jedno impulsowe, drugie stałopoziomowe (programowo wybierany poziom LOW lub
HIGH);
− programowe ustalenie czasu t trwania impulsu na wyjściu impulsowym: t∈{50µs; 100µs; 500µs; 1ms; 50ms; 100ms; 0,5s; 4s};
− przełączanie (zmiana funkcji) wyjść za pomocą jednej operacji;
− generowanie impulsów według programowych ustaleń (jedna
operacja odpowiada jednemu impulsowi na wyjściu);
− licznik liczby wygenerowanych impulsów na ekranie monitora
(z moŜliwością zerowania).
∗ generator fali prostokątnej:
− częstotliwość f wybierana programowo o wartościach 1Hz,
1kHz, 10kHz;
− częstotliwość na wyjściach A, B, C, D odpowiednio równa:
fA =
1
1
1
1
f ; f B = f ; fC = f ; f D =
f .
2
4
8
16
Monitorowanie wyjść badanego układu
- wizualizacja na monitorze PC stanów logicznych wybranych
wyjść badanego układu cyfrowego (dołączonych do końcówek
7÷0) w dwóch opcjach:
- w kodzie NKB;
- w kodzie szesnastkowym (HEX).
25
Zakłada się, Ŝe na wszystkich końcówkach (7÷0) istnieją stabilne stany
(LOW lub HIGH),
Funkcje realizowane przez komputer PC
∗ Tryb ręczny:
- „1 z 10” – wysyłanie i odbieranie po kaŜdym naciśnięciu przycisku,
- „Wektor bitowy” – wysłanie i odbieranie po kaŜdym naciśnięciu
przycisku,
- „5-bitowy licznik” – wysłanie i odbieranie po kaŜdym naciśnięciu
przycisku.
∗ Tryb automatyczny:
- „1 z 10” – po naciśnięciu przycisku uruchamiany jest zegar, który realizuje wysyłanie komend i odbieranie w określonych odstępach czasu,
- „5-bitowy licznik” – wysyłanie i odbieranie realizowane przez zegar.
Funkcje realizowane przez komputer wysyłają, określony dla danej funkcji pakiet komend, który jest odpowiednio interpretowany przez mikrokontroler i odbierają sygnały zwrotne po upływie określonego czasu.
Funkcje realizowane przez interfejs modułu
Funkcje realizowane przez interfejs modułu, zawierają się w trzecim trybie pracy.
Stanowią je Generatory:
- „Generator pojedynczych impulsów” – wysyłanie i odbieranie po
kaŜdym naciśnięciu przycisku,
- „Generator zadanej liczby impulsów” – odbiera komendy wysłane
przez komputer i uruchamia generator,
- „Generator fali prostokątnej” – komendy otrzymane przez komputer,
uruchamiają generator fali prostokątnej.
26
Realizowane jest równieŜ wysyłanie sygnałów zwrotnych. ZaleŜnie od
częstotliwości, sygnał jest wysyłany po kaŜdym wygenerowanym impulsie
(częstotliwość 1 Hz) lub po zatrzymaniu procesu generacyjnego (częstotliwości powyŜej 1 Hz).
2.1.3. Zasilacz
Dla układów TTL standardowym napięciem zasilania jest + 5V. Maksymalna odchyłka napięcia zasilania wynosi ±0,25V. Pobierane jest z modułu
zasilacza µM-UNI wyposaŜonego w stabilizator napięcia +5V.
2.1.4. Inne elementy
Wszystkie połączenia zamodelowanego układu cyfrowego realizowane są
za pomocą giętkich przewodów o zróŜnicowanej długości, dołączonych
w odpowiedniej liczbie do kaŜdego stanowiska laboratoryjnego. Do modelowania układów cyfrowych słuŜy zestaw elementów i bloków funkcyjnych
w postaci układów scalonych klasy TTL.
Dostępna jest równieŜ sonda logiczna TTL i CMOS typu Instek GLP-1A
(rysunek 2.5). UmoŜliwia ona sprawdzanie stanów logicznych badanych
układów cyfrowych.
Rys. 2.5.Sonda logiczna Instek GLP-1A.
27
2.2. Program Makieta laboratoryjna 1.0
Program Makieta laboratoryjna 1.0©
jest integralną częścią modułu układów
cyfrowych. Został napisany w ramach
pracy inŜynierskiej przez Bartłomieja
Denisa. Wszelkie prawa do programu
posiada Kolegium Karkonoskie.
2.2.1. Interfejs uŜytkownika
Interfejs uŜytkownika składa się z trzech zakładek, z których kaŜda reprezentuje określony tryb pracy, a w związku z tym ściśle określone funkcje.
KaŜdy tryb charakteryzuje się odpowiednią dla niego funkcjonalnością, gdzie
kaŜde naciśnięcie przycisku powoduje wykonanie pojedynczej akcji lub uruchomienie procedury generacyjnej. Dodatkowo, istnieją róŜnorodne zabezpieczenia w kaŜdym z trybów, spełniające zarówno funkcje eliminacji moŜliwości wystąpienia błędów, jak równieŜ funkcje czysto informacyjne.
Dwukrotne kliknięcie ikony Makieta.exe,
znajdującej
się
na
pulpicie monitora, spowoduje pojawienie się okna „Makieta do badania układów cyfrowych”, przedstawionego na rysunku 2.6.
Program posiada górne menu. Zakładka Makieta zawiera opcję ponownego wyszukania połączenia z makietą, zaś zakładka Pomoc zawiera informacje
typu proceduralnego oraz informację o programie.
Wciśnięcie przycisku „Szukaj połączenia” rozpoczyna procedurę wyszukiwania połączenia z modułem układów cyfrowych. Operacja przebiega automatycznie bez ingerencji uŜytkownika.
28
Rys. 2.6.Okno główne programu Makieta laboratoryjna.
W przypadku braku połączenia z modułem zostanie wygenerowany komunikat (rysunek 2.7):
Rys. 2.7. Komunikat braku połączenia z modułem.
Wciśnięcie przycisku „Przerwij” zakończy działanie programu. Naciśnięciu przycisku „Ponów próbę” spowoduje ponowne uruchomienie procedury
wyszukiwania modułu. Wciśnięcie przycisku „Ignoruj” pozwala na pracę bez
podłączonego modułu, umoŜliwiając zapoznania się z interfejsem programu.
Gdy program „znajdzie” połączenie z mikroprocesorowym sterownikiem
systemu, pojawia się uŜytkownikowi zestaw trybów pracy z całą gamą funkcji. Jako pierwsza zakładka pojawia się TRYB RĘCZNY (rysunek 2.8), gdzie
29
kaŜde naciśnięcie odpowiedniego przycisku wysyła sygnał do sterownika
modułu. Podzielona jest na kilka sekcji, z których kaŜda realizuje ściśle określoną funkcję. Zestaw przycisków jest jednoznacznie przypisany do odpowiedniej funkcji, zaś ich opisy informują o wykonywanych akcjach.
Rys. 2.8. Zakładka TRYB RĘCZNY.
Tryb „1 z 10” pozwala na przesuwanie stanu aktywnego w prawą bądź
lewą stronę. Określenie rodzaju stanu aktywnego pozostawione jest uŜytkownikowi. PoniŜej znajdują się okna monitorów, czyli pola tekstowe, w których
rejestrowane są sygnały wyjściowe z modułu, reprezentowane w kodzie binarnym oraz szesnastkowym. MoŜliwość włączenia lub wyłączenia monitorowania, realizowane jest za pomocą przycisku „Włącz monitorowanie”. Przy
uruchomieniu programu monitorowanie jest domyślnie ustawione w trybie
wyłączonym.
30
Po prawej stronie mamy do dyspozycji dwa funkcjonalnie zróŜnicowane
obszary:
- „Wektor bitowy”
- „5-bitowy licznik”
„Wektor bitowy” pozwala na wygenerowanie słowa bitowego, którego
wybrana powyŜej długość zmusza uŜytkownika do ustawienia poszczególnych bitów jako „1” lub „0”. Naciśnięcie przycisku „Zatwierdź” wysyła wektor do modułu, na wejścia badanego układu.
„5-bitowy licznik, umoŜliwia ustawienie stanu początkowego, a poprzez
wciśnięcie przycisku „Zatwierdź” wysłania bezpośrednio do sterownika modułu. Aby ułatwić wysyłanie kolejnych stanów licznika mamy do dyspozycji
przyciski inkrementacji lub dekrementacji stanów. MoŜemy po kaŜdej zmianie skorzystać z przycisku zatwierdzającego lub uŜyć opcji pracy automatycznej. Włączając automatyczną pracę licznika kaŜdy kolejny stan jest od
razu wysyłany bez konieczności kaŜdorazowego zatwierdzania.
Kolejna zakładka to TRYB AUTOMATYCZNY (rysunek 2.9). Składa się
z dwóch, podobnych jak w trybie ręcznym sekcji: „1 z 10” oraz „5-bitowy
licznik”.
Zasada działania automatycznego trybu pracy oparta jest na automatycznej procedurze generacji określonych stanów w określonych odstępach czasu.
Funkcja „1 z 10” działa podobnie jak w trybie ręcznym, jednak tutaj naciśnięcie któregokolwiek z przycisków uruchamia automat generacyjny. Do dyspozycji są trzy przedziały czasu: 1, 2 lub 4 sekundy. Wysyłanie sygnałów do
sterownika następuje kaŜdorazowo, co konkretny przedział czasu, do momentu zatrzymania. UŜytkownik ma moŜliwość przerwania procedury w kaŜdym
momencie jej działania. W obszarze „5-bitowy licznik” znajduje się dodatkowy przycisk „Zatwierdź”, który powoduje zatwierdzenie ustawionego początkowego stanu licznika. Oczywiście jak we wszystkich trybach pracy do
31
dyspozycji mamy monitor, na podstawie którego moŜemy śledzić zmiany występujące w badanym układzie.
Rys. 2.9. Zakładka TRYB AUTOMATYCZNY.
NajwaŜniejszym i najbardziej rozbudowanym trybem pracy są GENERATORY (rysunek 2.10). Tryb ten stanowi grupę róŜnych generatorów,
z których kaŜdy jest nieodzownym elementem badań układów cyfrowych.
Interfejs na pierwszy rzut oka, moŜe wydawać się niezwykle skomplikowany,
jednak po bardziej wnikliwym przyjrzeniu się dostępnym opcjom, staje się
czytelny i przejrzysty.
32
Rys. 2.10. Zakładka GENERATORY pracy oprogramowania.
Największą ilość ustawianych parametrów daje nam generator pojedynczych impulsów. Oprócz podstawowego wyboru wyjścia generatora, dokonujemy równieŜ wyboru rodzaju impulsu, stanu na wyjściu stałopoziomowym
oraz czasu generowanego impulsu. KaŜde naciśnięcie przycisku „Generuj”
powoduje generację pojedynczego impulsu, który jednocześnie jest zliczany
przez licznik umieszczony z lewej strony zakładki. Ilość generowanych impulsów nie jest ograniczona.
Po prawej stronie zakładki znajduje się generator zadanej liczby impulsów. W przeciwieństwie do generatora pojedynczych impulsów, naciśnięcie
przycisku „Generuj” uruchamia procedurę generacyjną określonej liczby impulsów. Proces trwa do momentu wygenerowania zadanej liczby impulsów
lub wcześniejszego przerwania przez uŜytkownika. Funkcja ta umoŜliwia do33
konanie wyboru wyjścia generatora, stanu na wyjściu stałopoziomowym oraz
wartości częstotliwości. Generator pozwala na ustawienie ilości impulsów
w przedziale od 2 do 255.
Ostatnią funkcją w tym trybie pracy jest generator fali prostokątnej.
W swoich opcjonalnych moŜliwościach pozwala na ustawienie częstotliwości.
Uruchomiony, działa do momentu przerwania przez uŜytkownika lub zakończenia programu. Dostępny jest równieŜ monitor, ale w odróŜnieniu od poprzednich trybów pracy monitor zbiorowy pojawia się po naciśnięciu przycisku „Wszystkie stany”. Działanie tego trybu pracy, poza generatorem pojedynczych impulsów, polega na wysłaniu odpowiedniej komendy do mikrokontrolera, który uruchamia odpowiadający jej generator.
2.2.2. Komunikaty występujące w programie
W programie „Makieta laboratoryjna” występują zarówno komunikaty
informujące o wystąpieniu błędu, jak równieŜ komunikaty wymagające od
uŜytkownika podjęcia określonej decyzji.
Wszystkie wpisywane przez uŜytkownika dane muszą być w reprezentacji
binarnej, stąd kaŜda próba zatwierdzenia nieprawidłowo wpisanych danych
jest odrzucana. Wizualizacja tego rodzaju przypadków realizowana jest
w postaci dwóch komunikatów. Pierwszy z nich (rysunek 2.11) występuje
wówczas, gdy wpisane słowo jest niewłaściwej długości (stosowane przy
funkcji „wektor bitowy”).
Rys. 2.11. Niewłaściwa długość słowa.
34
Dodatkowo informuje uŜytkownika, jaka jest prawidłowa długość słowa.
Natomiast, komunikat drugi (rysunek 2.12) przypomina uŜytkownikowi, iŜ
wpisywana liczba musi być w systemie binarnym.
Rys. 2.12. Konieczność wpisywania danych w systemie binarnym.
Działanie generatorów polega na wygenerowaniu określonej, zaleŜnie od
rodzaju generatora, liczby impulsów o ustalonych parametrach. Szczególne
znaczenie ma ustawienie wszystkich parametrów, gdyŜ brak jakiegokolwiek
spowodowałoby nieprawidłową pracę a nawet brak reakcji sterownika makiety. Działanie generatorów realizowane jest przez mikrokontroler, umieszczony w sterowniku makiety, a więc nieotrzymanie dokładnej listy komend nie
uruchomi Ŝadnej funkcji generacyjnej. Dodatkowo brak ustawienia jakiejkolwiek z opcji powoduje wygenerowanie komunikatu informacyjnego (rysunek
2.13), zmuszającego uŜytkownika do ustawienia wszystkich parametrów pracy określonego generatora.
Rys. 2.13. Ustawienie wszystkich parametrów.
W generatorze zadanej liczby impulsów, poza informacją o parametrach
pojawia się jeszcze jeden komunikat. Ze względu na przedział liczbowy,
w jakim musi się zawierać ilość generowanych impulsów, naleŜało zablokować moŜliwość wpisania liczby z poza przedziału. JeŜeli wpiszemy liczbę
mniejszą od 2 lub większą od 255 wygenerowany zostanie komunikat monitujący uŜytkownika do zmiany liczby (rysunek 2.14).
35
Rys. 2.14. Liczba generowanych impulsów.
NajwaŜniejszym komunikatem, stanowiącym integralną część systemu
zwarciowego sterownika modułu jest wizualizacja wystąpienia zwarcia.
W momencie, kiedy podczas podłączania układu cyfrowego, na którym będziemy przeprowadzać badania, wystąpi zwarcie, na monitorze pojawi się
komunikat (rysunek 2.15).
Rys. 2.15. Zwarcie na module.
Komunikat jednocześnie zmusza uŜytkownika do sprawdzenia połączeń
i wyeliminowania zwarcia. Będzie do tej pory się pojawiał dopóki zwarcie nie
zostanie wyeliminowane. Rozwiązanie niejednokrotnie moŜe ustrzec uŜytkownika przed uszkodzeniem badanego układu a nawet modułu.
Gdy skończyliśmy badania i chcemy zakończyć pracę programu, po naciśnięciu przycisku „Zakończ program” pojawi się jeszcze jeden komunikat
(rysunek 2.16), proszący o potwierdzenie decyzji o zakończeniu pracy.
.
Rys. 2.16. Zakończenie pracy programu.
36
2.2.3. Pomoc programu
System pomocy programu „Makieta laboratoryjna” jest typu proceduralnego. Zakładka Pomoc, w górnym menu okna programu, umoŜliwia dostęp
do dokumentacji tekstowej popartej ilustracjami umoŜliwiającej odwołanie
się do programu (rysunek 2.17). Opisane są krok po kroku czynności, jakie
musi wykonać uŜytkownik, aby wykonać konkretne zadanie, np. wygenerować 20 impulsów o konkretnych parametrach za pomocą generatora zadanej
liczby impulsów.
Jest podzielona na trzy grupy, odpowiadające podziałowi interfejsu, czyli
tryb ręczny, tryb automatyczny oraz generatory. Ponadto znajdują się informacje o instalacji oraz procesie uruchamiania oprogramowania.
Ze względu na zawartość i przeznaczenie system pomocy moŜna podzielić na kilka kategorii, spełniających zapotrzebowanie na róŜnego rodzaju informacje. Są to:
∗ pomoc proceduralna - opisuje metody wykonywania konkretnych
zadań,
∗ pomoc koncepcyjna - wyjaśnia mechanizmy działania poszczególnych trybów pracy i leŜące u ich podstaw zasady,
∗ pomoc instruktaŜowa - zawiera informacje, spełniające funkcje nauczania uŜytkownika metod korzystania z programu.
37
Rys. 2.17. Okno „Pomocy”.
38
3. ĆWICZENIA LABORATORYJNE
3.1. Cele kształcenia
Zajęcia laboratoryjne mają na celu praktyczną weryfikację, ugruntowanie
i poszerzenie nabytej wiedzy teoretycznej oraz kształtowanie umiejętności
praktycznych łączenia układów pomiarowych, poprawnego odczytywania
wyników i prowadzenia odpowiedniej dokumentacji pomiarów.
Kształtowanie umiejętności metrologicznych, takich jak: prawidłowe zaplanowanie pomiarów celem przeprowadzenia doświadczenia, poprawna organizacja stanowiska pomiarowego i właściwa eksploatacja aparatury oraz
ocena i dyskusja wyników pod względem ich wiarygodności.
Zapoznanie studentów z układami cyfrowymi klasy TTLS, stosowanymi
strukturami układów cyfrowych, a takŜe metodyką projektowania urządzeń
cyfrowych na poziomie stosowania bloków funkcjonalnych.
Oczekuje się, Ŝe uczestnictwo w zajęciach pozwoli studentom na wykonywanie samodzielnych projektów z uŜyciem cyfrowych układów oraz interpretację i dyskusję otrzymanych wyników w trakcie badań.
3.2. Charakterystyka ćwiczeń
Treści programowe
Określenie właściwości logicznych badanych monolitycznych cyfrowych
układów scalonych realizowanych w klasie TTLS, poznanie moŜliwości realizacji dowolnych wyraŜeń logicznych na podstawie wybranych elementów
scalonych małej skali integracji.
39
Zagadnienie praktycznej realizacji zadanej funkcji logicznej rozwaŜa się
w dwóch aspektach:
- z punktu widzenia przypadkowego zestawu wolnych funktorów,
- z punktu widzenia doboru właściwych funktorów, aby otrzymany układ
zawierał minimalną liczbę elementów scalonych.
3.2.1. Wprowadzenie do ćwiczeń laboratoryjnych, wymagania,
literatura, zasady BHP
Omówienie spraw organizacyjnych związanych z wykonaniem i zaliczeniem ćwiczeń laboratoryjnych: podział na grupy i podgrupy, zapoznanie
z Regulaminem Laboratorium Techniki Cyfrowej oraz Przepisami BHP obowiązującymi w laboratorium, przedstawienie tematyki i zasad zaliczenia ćwiczeń laboratoryjnych, zapoznanie z literaturą podstawową i uzupełniającą.
3.2.2. Zapoznanie się z makietą laboratoryjną, moŜliwościami,
właściwościami oraz oprogramowaniem sterownika
Celem ćwiczenia jest poznanie środowiska projektowego:
− makiety laboratoryjnej ML-1;
− programu „Makieta laboratoryjna 1.0.”
Program ćwiczenia obejmuje:
Poznanie budowy makiety laboratoryjnej ML-1 oraz moŜliwości
modelowania układów logicznych z jej wykorzystaniem.
Poznanie programu Makieta laboratoryjna 1.0.
Zaprojektowanie i sprawdzenie poprawności działania trójwejściowych elementów logicznych zrealizowanych z elementów
dwuwejściowych.
Zrealizowanie funkcji logicznych z bramek NAND i NOR.
Przygotowanie do ćwiczeń.
Studenci winni zapoznać się z instrukcją laboratoryjną „Laboratorium
Techniki Cyfrowej”, ze szczególnym zwróceniem uwagi na rozdział 2 - Ma40
kieta laboratoryjna ML-1. Wymagana jest znajomość podstaw matematycznych układów przełączających: algebra Boole’a, aksjomaty, definicje i twierdzenia, podstawowe funkcje logiczne - suma, iloczyn, negacja, suma zanegowana, iloczyn zanegowany, suma modulo 2, postać kanoniczna sumy i iloczynu dla funkcji logicznej.
3.2.3. Podstawowe elementy logiczne rodziny 74LS
Celem ćwiczenia jest zapoznanie się z:
− strukturą i właściwościami logicznymi podstawowych elementów logicznych badanych monolitycznych układów scalonych:
bramek i przerzutników;
− problemami związanymi z syntezą kombinacyjnych układów logicznych opartyą na zadanym zbiorze bramek logicznych;
− wyrobienie umiejętności budowy układów kombinacyjnych i sekwencyjnych z podstawowych elementów kombinacyjnych na
podstawie opisu słownego, tablicowego lub numerycznego.
Program ćwiczenia obejmuje:
Sprawdzenie poprawności działania wskazanych bramek.
Zaprojektowanie i sprawdzenie prostych cyfrowych sieci kombinacyjnych.
Sprawdzenie poprawności działania przerzutników.
Transformację róŜnych typów przerzutników.
Syntezę jednowyjściowych układów kombinacyjnych oraz sposób
ich realizacji.
Badane układy scalone:
∗ 74LS00
74LS02
74LS04
74LS08
∗ 74LS10
74LS20
74LS32
74LS38
∗ 74LS86
74LS74
74LS107
74LS244
41
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Treść i formę
prezentacji zadań określa prowadzący zajęcia. Do kaŜdego zadania studenci
przygotowują rozwiązania w postaci wyraŜeń logicznych i schematu ideowego układu, zaprojektowanego z dostępnych w zestawie elementów cyfrowych.
Rozwiązania winny być przedstawione w protokole, który jest podstawą wykonania ćwiczenia. Wymagana jest znajomość podstawowych pojęć i toŜsamości algebry Boole’a, praw De Morgana, metod syntezy funkcji logicznych
jednowyjściowych na elementach małej skali integracji, rodzaje przerzutników, realizacja przerzutnika RS w oparciu o bramki NAND lub NOR, pojęcie
przerzutnika synchronicznego i asynchronicznego, konwersja przerzutników
synchronicznych.
Zagadnienia do opracowania:
1. Zdefiniować podstawowe funkcje logiczne.
2. Omówić sposoby przedstawiania funkcji logicznych.
3. Przedstawić postać sumacyjną i iloczynową wyraŜeń logicznych tej
samej funkcji przełączającej.
4. Przedstawić konstrukcję mapy Karnaugha i wykorzystanie jej do minimalizacji funkcji.
5. Zdefiniować podstawowe parametry statyczne układów cyfrowych
i podać ich typowe wartości dla układów TTLS.
6. Podać klasyfikację przerzutników.
7. Podać równania funkcyjne przerzutników: SR, JK, D, T.
8. Omówić budowę i działanie przerzutnika wyzwalanego impulsem JKMS.
9. Podać schematy funkcjonalne konwersji przerzutnika T w przerzutniki
JK i D.
10.Wyjaśnić pojęcie dwójki liczącej oraz podać przykłady realizacji z wykorzystaniem przerzutników.
42
3.2.4. Układy konwersji kodów
Celem ćwiczenia jest zapoznanie się z:
− projektowaniem prostych układów logicznych realizujących
funkcje koderów, dekoderów i transkoderów z wykorzystaniem
wybranych elementów scalonych małej skali integracji;
− budową i zasadą działania układów konwersji kodów realizowanych z bramek logicznych lub wykonanych w postaci monolitycznych układów scalonych;
− sposobami realizacji układów konwersji kodów techniką TTL
i metodami ich badania.
Program ćwiczenia obejmuje:
Zaprojektowanie z bramek i sprawdzenie poprawności działania
wskazanych układów:
− kodera zwykłego lub priorytetowego;
− dekodera kodu BCD na kod „1 z n”;
− transkodera zadanego kodu wejściowego na wyróŜniony kod
wyjściowy.
Zapoznanie się z budową i badanie scalonego enkodera priorytetowego 74LS148.
Zapoznanie się z budową i badanie scalonych dekoderów
74LS138 i 74LS145.
Zapoznanie się z budową i zasadą działania dekodera kodu BCD
na kod wskaźnika siedmiosegmentowego 74LS47.
Badane układy scalone:
∗ 74LS47
74LS138
74LS145
74LS148
Do realizacji układów konwersji kodów z układów scalonych małej i średniej skali integracji moŜna zastosować inny zestaw laboratoryjny, po wcześniejszym uzgodnieniu z prowadzącym zajęcia.
43
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Treść i formę
prezentacji zadań określa prowadzący zajęcia. Do kaŜdego zadania studenci
przygotowują rozwiązania w postaci wyraŜeń logicznych i schematu ideowego układu zaprojektowanego z dostępnych w zestawie elementów cyfrowych.
Rozwiązania winny być przedstawione w protokole, który jest podstawą wykonania sprawozdania. Wymagana jest znajomość podstawowych rodzajów
kodów binarnych: NKB, BCD, 1 z n, Greya, metod syntezy funkcji logicznych wielowyjściowych na elementach małej i średniej skali integracji.
Zagadnienia do opracowania:
1. Omówić zasady konwersji liczb dziesiętnych na liczby binarne i odwrotnie.
2. Omówić kody naturalne i kody BCD.
3. Zdefiniować i dokonać podziału konwerterów kodów.
4. Omówić budowę i zasadę działania iteracyjnego enkodera priorytetowego.
5. Omówić budowę i właściwości enkodera 74LS148.
6. Omówić budowę i przeznaczenie dekodera.
7. Omówić budowę i właściwości dekoderów scalonych 74LS138
i 74LS145.
8. Przedstawić zasady syntezy transkoderów.
9. Przedstawić zasady konwersji liczb binarnych na liczby zapisane w kodzie Graya.
10.Omówić przeznaczenie wejść funkcyjnych układu scalonego 74LS47.
3.2.5. Układy komutacyjne
Celem ćwiczenia jest:
− poznanie budowy, zasady działania i zastosowań scalonych układów multiplekserów i demultiplekserów;
44
− praktyczna realizacja i badanie zadanych układów komutacyjnych;
− praktyczna realizacja i badanie generatorów funkcji logicznych
budowanych z bloków komutacyjnych.
Program ćwiczenia obejmuje:
Zaprojektowanie z podstawowych bramek logicznych multipleksera czterobitowego i sprawdzenie poprawności jego działania.
Sprawdzenie działania logicznego scalonych układów 74LS151,
74LS153 i 74LS155.
Zastosowanie multiplekserów i demultiplekserów do realizacji zadanych funkcji boolowskich.
Zaprojektowanie i sprawdzenie układu generatora impulsów zegarowych:
− o programowanym współczynniku wypełnienia,
− wielofazowego (2 lub więcej faz), realizowanego za pomocą
bramek, przerzutnika i multipleksera.
Symulację 4 kanałowego przesyłania informacji jedną linią od nadajnika do odbiornika.
Badane układy scalone:
∗ 74LS153
74LS155
Do realizacji układów komutacyjnych z układów scalonych małej i średniej
skali integracji moŜna zastosować inny zestaw laboratoryjny, po wcześniejszym uzgodnieniu z prowadzącym zajęcia.
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Treść i formę
prezentacji zadań określa prowadzący zajęcia. Do kaŜdego zadania studenci
przygotowują rozwiązania w postaci wyraŜeń logicznych i schematu ideowego układu, zaprojektowanego z dostępnych w zestawie elementów cyfrowych.
Rozwiązania winny być przedstawione w protokole, który jest podstawą wy45
konania sprawozdania. Wymagana jest znajomość budowy, zasady działania,
metod syntezy funkcji logicznych wielowyjściowych oraz sposoby ich realizacji na elementach średniej skali integracji.
Zagadnienia do opracowania:
1. Omówić właściwości multipleksera.
2. Scharakteryzować metodę syntezy układów kombinacyjnych z uŜyciem
multiplekserów wykorzystująca tablice Karnaugha.
3. Omówić budowę i właściwości multipleksera 74LS153.
4. Omówić budowę multipleksera piramidalnego.
5. Omówić zasady budowy multiplekserowych układów wielopoziomowych.
6. Omówić właściwości demultipleksera.
7. Podać róŜnicę między dekoderem a demultiplekserem.
8. Scharakteryzować metodę syntezy układów kombinacyjnych z uŜyciem
demultiplekserów.
9. Omówić budowę i właściwości demultipleksera/dekodera 74LS155.
10.Omówić zastosowanie multipleksera i demultipleksera jako układów
uniwersalnych.
3.2.6. Rejestry równoległe i przesuwające
Celem ćwiczenia jest zapoznanie się ze sposobami realizacji podstawowych rodzajów rejestrów równoległych i przesuwających, z ich budową, zasadą działania oraz moŜliwościami funkcjonalnymi scalonych układów rejestrów równoległych i szeregowych (przesuwnych).
Program ćwiczenia obejmuje:
Sprawdzenie poprawności działania logicznego scalonych układów rejestrów równoległych: 74LS174 i 74LS175.
Zaprojektowanie, realizację i sprawdzenie działania wskazanego
układu rejestru przesuwnego:
46
− 3 bitowego rejestru rewersyjnego z przesuwem informacji;
− 6 bitowego rejestru z przesuwem informacji w prawo albo w lewo (naleŜy zastosować bramki i układy 74LS174, 74LS175),
− licznika pierścieniowego z układem kombinacyjnym pełniącym
rolę przełącznika ładowanie/zamknięcie pierścienia.
Sprawdzenie poprawności działania logicznego scalonych układów rejestrów przesuwnych 74LS164, 74LS165 i 74LS194.
Badane układy scalone:
∗ 74LS164
74LS165
74LS174
74LS194
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Do kaŜdego zadania studenci przygotowują rozwiązania w postaci schematu ideowego układu, zaprojektowanego z dostępnych w zestawie elementów cyfrowych. Rozwiązania winny być przedstawione w protokole, który jest podstawą wykonania sprawozdania. Wymagana jest znajomość budowy, zasady działania, sposoby wprowadzania informacji do rejestrów i wyprowadzania informacji
z rejestrów, budowy struktury wewnętrznej i zasady działania badanych układów.
Zagadnienia do opracowania:
1. Zdefiniować układ sekwencyjny.
2. Przerzutniki jako elementy pamięci w układach sekwencyjnych - opis
słowny, tablicowy, za pomocą grafu i funkcji logicznej.
3. Napisać tablice wzbudzeń dla przerzutników JK, D, T.
4. Podać podstawowe rodzaje rejestrów.
5. Omówić układy równoległego wprowadzania informacji do rejestru.
6. Scharakteryzować rejestry przesuwające.
7. Podać strukturę rejestru liczącego.
8. Omówić układy odczytu równoległego informacji z rejestru.
47
9. Wyjaśnić zamianę informacji równoległej na szeregową i odwrotnie na
przykładzie scalonych rejestrów 74LS164 oraz 74LS165.
10. Omówić budowę i właściwości rejestru uniwersalnego 74LS194.
3.2.7. Liczniki asynchroniczne
Celem ćwiczenia jest poznanie własności oraz zasad projektowania podstawowych liczników asynchronicznych modulo N, budowanych z odpowiednio ze sobą połączonych przerzutników TTLS oraz zapoznanie się z budową i zasadą działania scalonych liczników asynchronicznych dziesiętnych
i binarnych.
Program ćwiczenia obejmuje:
Zaprojektowanie i badanie poprawności działania zadanych liczników, realizowanych z bramek i przerzutników bistabilnych.
Zapoznanie się z budową i moŜliwościami funkcjonalnymi asynchronicznych liczników scalonych 74LS90 i 74LS93.
Zaprojektowanie i sprawdzenie poprawności działania liczników
modulo N, realizowanych za pomocą bramek i liczników scalonych. Wartość N zadaje prowadzący zajęcia (naleŜy tu uwzględnić
liczniki o pojemności z zakresu 2÷255).
Badane układy scalone:
∗ 74LS90
74LS93
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Do kaŜdego zadania studenci przygotowują rozwiązania w postaci schematu ideowego układu, zaprojektowanego z dostępnych w zestawie elementów cyfrowych. Rozwiązania winny być przedstawione w protokole, który jest podstawą wykonania sprawozdania. Wymagana jest znajomość budowy, metod syntezy liczników mod. N, struktury wewnętrznej i zasady działania badanych układów.
Zagadnienia do opracowania:
48
1. Wymienić główne kryteria podziału i rodzaje liczników.
2. Przedstawić schemat logiczny asynchronicznego licznika liczącego
w przód.
3. Przedstawić schemat logiczny asynchronicznego licznika liczącego
w tył.
4. Narysować i omówić schematy funkcjonalne liczników scalonych
74LS90 i 74LS93.
5. Omówić właściwości liczników scalonych 74LS90 i 74LS93.
6. Narysować schemat logiczny licznika asynchronicznego o zadanym
modulo N, stosując metodę rozkładu liczby N na czynniki.
7. Narysować schemat układu licznika o zadanym modulo wykorzystując
układy 74LS90 lub 74LS93.
8. Przedstawić rozwiązanie programowalnego dzielnika częstotliwości
opartego o licznik o pojemności 8.
9. Omówić szeregowy sposób łączenia liczników asynchronicznych dla
uzyskania licznika o większej pojemności.
10.Omówić równoległy sposób łączenia liczników asynchronicznych dla
uzyskania licznika o większej pojemności.
3.2.8. Liczniki synchroniczne
Celem ćwiczenia jest kształtowanie umiejętności projektowania liczników
synchronicznych realizowanych z przerzutników i bramek logicznych oraz
zapoznanie się z budową, zasadą działania i moŜliwościami funkcyjnymi wybranych scalonych układów liczników synchronicznych.
Program ćwiczenia obejmuje:
Zaprojektowanie, realizację i sprawdzenie poprawności działania
liczników synchronicznych o zadanej pojemności, budowanych
z bramek i przerzutników:
49
− zliczających w przód, dla zadanego typu przerzutnika i rodzaju
przeniesienia (szeregowego albo równoległego);
− zliczających w tył, dla zadanego typu przerzutnika i rodzaju
przeniesienia;
− dwukierunkowych (rewersyjnych).
Zapoznanie się z budową, moŜliwościami funkcjonalnymi
i sprawdzenie działania scalonych liczników 74LS192 i 74LS193.
Zaprojektowanie, realizację i badanie liczników o programowanej
pojemności N z zakresu 1÷15, a takŜe liczników o pojemności
z zakresu 2÷255 (naleŜy stosować bramki i liczniki scalone).
Poznanie budowy i zasady działania programowalnych dzielników
częstotliwości.
Badane układy scalone:
∗ 74LS163
74LS193
74LS197
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Do kaŜdego zadania studenci przygotowują rozwiązania w postaci schematu ideowego układu, zaprojektowanego z dostępnych w zestawie elementów cyfrowych. Rozwiązania winny być przedstawione w protokole, który jest podstawą wykonania sprawozdania. Wymagana jest znajomość budowy, sposoby projektowania na przerzutnikach JK, D i T, struktury wewnętrznej i zasady działania badanych grup układów, zasady projektowania liczników mod. N.
Zagadnienia do opracowania:
1. Wyjaśnić podstawowe róŜnice pomiędzy licznikami asynchronicznymi
a synchronicznymi.
2. Omówić budowę jednokierunkowego synchronicznego licznika dwójkowego zliczającego w naturalnym kodzie dwójkowym.
50
3. Omówić właściwości liczników jednokierunkowych na przykładzie
układu 74LS163.
4. Przedstawić zasady kaskadowego łączenia liczników 74LS163.
5. Scharakteryzować synchroniczne liczniki rewersyjne.
6. Omówić właściwości licznika scalonego 74LS193.
7. Omówić rozwiązania licznika zliczającego mod. N wykorzystując
układ 74LS193.
8. Przedstawić zasady kaskadowego łączenia liczników 74LS193 w licznik o duŜej pojemności.
9. Omówić właściwości licznika scalonego 74LS197.
3.2.9. Układy arytmetyczne
Celem ćwiczenia jest doświadczalne poznanie:
− budowy, właściwości funkcyjnych i logicznych badanych sumatorów dwójkowych;
− moŜliwości wykorzystania sumatorów liczb dwójkowych i dwójkowo-dziesiętnych;
− budowy i przeznaczenia komparatorów.
Program ćwiczenia obejmuje:
Zbudowanie i zbadanie półsumatora i sumatora jednobitowego.
Zaprojektowanie i sprawdzenie działania:
− układu sumatora dwóch liczb dwubitowych,
− układu subtraktora dwóch liczb dwubitowych.
Zapoznanie się z budową i sprawdzenie działania:
− scalonego układu sumatora dwóch liczb czterobitowych 74LS83,
− scalonego układu komparatora dwóch liczb czterobitowych
74LS85.
Zaprojektowanie i sprawdzenie działania wskazanego układu:
51
− realizującego dodawanie i odejmowanie dwóch liczb czterobitowych w kodzie uzupełnienia do 2,
− komparatora szeregowego dwóch liczb czterobitowych A i B
w kodzie naturalnym binarnym określającego relacje A=B, A≠B.
Badane układy scalone:
∗ 74LS83
74LS85
Przygotowanie do ćwiczeń.
KaŜda grupa otrzymuje indywidualne zadania projektowe. Treść i formę
prezentacji zadań określa prowadzący zajęcia. Do kaŜdego zadania studenci
przygotowują rozwiązania w postaci wyraŜeń logicznych i schematu ideowego układu, zaprojektowanego z dostępnych w zestawie elementów cyfrowych.
Rozwiązania winny być przedstawione w protokole, który jest podstawą wykonania sprawozdania. Wymagana jest znajomość systemów zapisu liczb stosowanych w arytmetyce urządzeń liczących, zasady działania badanych grup
układów oraz realizacji podstawowych operacji arytmetycznych na liczbach
dwójkowych i dwójkowo-dziesiętnych, przedstawionych w róŜnych kodach.
Zagadnienia do opracowania:
1. Zdefiniować i dokonać podziału układów arytmetycznych.
2. Opisać budowę i działanie sumatora jednobitowych liczb dwójkowych.
3. Podać funkcje logiczne sumatora i subtraktora pełnego.
4. Sumator binarny jako przykład układu iteracyjnego. Realizacja dodawania w zapisie ZU1i ZU2.
5. Wyjaśnić zasadę szeregowego dodawania wielobitowych liczb dwójkowych.
6. Wyjaśnić zasadę równoległego dodawania wielobitowych liczb dwójkowych.
7. Opisać budowę i działanie sumatora akumulującego.
8. Omówić budowę układu dodająco-odejmujacego liczb czterobitowych.
52
9. Omówić budowę komparatora równoległego.
10.Omówić budowę komparatora szeregowego.
3.2.10. Termin odróbczy
MoŜliwość poprawienia i odrobienia zaległości. W terminie obróbczym
istnieje moŜliwość poprawienia jednego ćwiczenia laboratoryjnego.
53
3.3. Elementy logiczne i bloki funkcjonalne występujące na stanowisku laboratoryjnym
3.3.1. Podstawowe oznaczenia graficzne
Nazwa elementu
Oznaczenie graficzne
Realizowana funkcja
AND
(I)
y = x1 ⋅ x2
OR
(LUB)
y = x1 + x2
NAND
(NIE-I)
y = x1 ⋅ x2
NOR
(NIE-LUB)
y = x1 + x2
y = x1 ⊕ x2 =
EXOR
(Wyłącznie LUB)
= x1 x2 ∨ x1 x2
y = x1 ⊗ x2 =
EXNOR
= x1 x 2 ∨ x1 x2
NOT
(NIE)
y=x
BUFOR
y=x
BUFOR TRÓJSTANOWY
Ekspander AND
ENB
y=x
y = x1 ⋅ x2
zwiększenie liczby wejść
AND
bramka wielowejściowa
NOR
bramka wielowejściowa
54
y = x1 ⋅ x2 ⋅ ... ⋅ xn
y = x1 + x2 + ... + xn
Nazwa elementu
Oznaczenie graficzne
Przerzutnik
Qn+1 = S + RnQn
synchroniczny SR
Przerzutnik
Qn +1 = J n Qn + K n Qn
synchroniczny JK
Przerzutnik
Qn +1 = Dn
synchroniczny D
Przerzutnik
synchroniczny T
Rejestr
Licznik
Realizowana funkcja
T
D
SET
Q
Qn +1 = Tn Qn + Tn Qn = Tn ⊕ Qn
CLR
Q
Y := SHR ( x p , Y )
Y := SHL(Y , xl )
Y := Y + 1 = INC (Y )
Y := Y − 1 = DEC (Y )
55
Nazwa elementu
Oznaczenie graficzne
Realizowana funkcja
N −1
Multiplekser
yk = e∑ Pk ( A)d k
k =0
56
Demultiplekser
yk = ePk ( A)d
Dekoder
y k = Pk ( A)
Sumator
Y = A + B + c0
Komparator
Yi = f i ( A − B )
3.3.2. Wykaz układów scalonych 74LS dostępnych na stanowisku laboratoryjnym
Elementy logiczne i bloki funkcjonalne
Lp. Typ elementu Ilość (szt.)
Lp.
Typ elementu Ilość (szt.)
1.
74LS00
2
16.
74LS138
1
2.
74LS02
2
17.
74LS145
2
3.
74LS04
1
18.
74LS148
1
4.
74LS08
2
19.
74LS153
1
5.
74LS10
2
20.
74LS155
1
6.
74LS20
2
21.
74LS163
1
7.
74LS32
2
22.
74LS164
1
8.
74LS38
2
23.
74LS165
1
9.
74LS47
1
24.
74LS174
1
10.
74LS74
2
25.
74LS193
2
11.
74LS83
2
26.
74LS194
1
12.
74LS86
2
27.
74LS197
1
13.
74LS90
2
28.
74LS244
2
14.
74LS93
2
29.
74LS245
2
15.
74LS107
2
30.
74LS259
1
Struktury PLD
Lp.
Typ elementu
Ilość (szt.)
1.
GAL16V8
2
2.
GAL22V10
2
57
3.3.3. Funkcje układów scalonych 74LS występujących na stanowisku laboratoryjnym
7400 - Quad 2-input NAND gates. – Czterokrotne, 2-wejściowe bramki
NAND.
7402 - Quad 2-input NOR gates - Czterokrotne, 2-wejściowe bramki NOR.
7404 - Hex inverters - Sześciokrotne inwertory.
7408 - Quad 2-input AND gates - Czterokrotne, 2-wejściowe bramki AND.
7410 - Triple 3-input NAND gates - Trzykrotne, 3-wejściowe bramki NAND.
7420 - Dual 4-input NAND gates - Dwukrotne, 4-wejściowe bramki NAND.
7432 - Quad 2-input OR gates - Czterokrotne, 2-wejściowe bramki OR.
7438 - Quad 2-input open-collector NAND gates with buffered output Czterokrotne, 2-wejściowe bramki buforowe NAND z otwartym kolektorem tranzystora wyjściowego.
7447 - Open-collector BCD to 7-segment decoder/common-anode LED
driver with ripple blank input - Dekoder kodu BCD na kod wskaźnika
7-segmentowego, z wyjściami typu otwarty kolektor.
7474 - Dual D flip-flop with set and reset - Dwukrotne przerzutniki typu D
wyzwalane dodatnim zboczem.
7483 - 4-bit binary full adder with fast carry - Pełny sumator 4-pozycyjny
(binarny) z szybkim przeniesieniem.
7486 - Quad 2-input XOR gates - Czterokrotne, 2-wejściowe bramki exclusive-OR
7490 - 4-bit asynchronous decade counter with /2 and /5 sections, set(9) and
reset - 4-bitowy asynchroniczny licznik dziesiętny.
7493 - 4-bit asynchronous binary counter with /2 and /8 sections and reset 4-bitowy asynchroniczny licznik dwójkowy.
74107 - Dual J-K flip-flop with clear - Dwukrotne przerzutniki J-K MS
z wejściem zerowania.
58
74138 - 1-of-8 inverting decoder/demultiplexer. - Dekoder/demultiplekser
z 3 linii na 8 linii.
74145 - 1-of-10 open-collector inverting decoder/demultiplexer. - Dekoder
kodu BCD na kod dziesiętny z wyjściami typu otwarty kolektor.
74148 - 8-to-3 line inverting priority encoder with cascade inputs. - Enkoder
priorytetowy typu "8 linii na 3 linie".
74153 - 8-to-2 line noninverting data selector/multiplexer with separate enables. - Podwójne, 4-wejściowe multipleksery/selektory danych.
74155 - 2-of-8 inverting decoder/demultiplexer with separate enables. Podwójne dekodery/demultipleksery z 2 linii na 4 linie.
74163 - 4-bit synchronous binary counter with load, reset, and ripple carry
output. - Synchroniczny, 4-bitowy licznik dwójkowy z wejściem
zerującym.
74164 - 8-bit serial-in parallel-out shift register with asynchronous reset
and two AND gated serial inputs. - 8-bitowy rejestr przesuwający,
z wejściami szeregowymi i wyjściami równoległymi.
74165 - 8-bit parallel-in serial-out shift register with asynchronous parallel
load and two OR gated clock inputs. - 8-bitowy rejestr przesuwający,
z wejściami równoległymi i wyjściami szeregowym.
74174 - 8-bit D flip-flop with reset. - Ośmiokrotne przerzutniki typu D,
z wejściem zerującym.
74193 - 4-bit synchronous binary up/down counter with asynchronous load
and reset, and separate up and down clocks. Carry and borrow outputs. - Synchroniczny binarny licznik rewersyjny o 2-wejściach zegarowych z kasowaniem.
74194 - 4-bit bidirectional universal shift register with asynchronous reset. 4-bitowy, dwukierunkowy rejestr przesuwający.
74197 - 4-bit asynchronous binary counter with /2 and /8 sections, load and
reset. - 30 MHz, ustawialny, 4-bitowy, dwójkowy licznik/zatrzask.
59
74244 -
Dual 4-bit 3-state noninverting buffer/line driver. - 8-bitowy
(dwukrotny, 4-bitowy), buforowany odbiornik linii, wyjście proste.
74245 - 8-bit 3-state noninverting bus transceiver. Enable and direction
pins control output enables. - 8-bitowa brama, wyjścia 3-stanowe,
proste.
74259 - 1-of-8 addressable latch with reset. - 8-bitowy adresowany zatrzask.
60
3.3.4. Wyciąg z not katalogowych układów scalonych 74LS
występujących na stanowisku laboratoryjnym
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
3.4. Literatura do ćwiczeń laboratoryjnych
Literatura podstawowa:
1. Dziuda A., Krupa W.: Laboratorium Techniki Cyfrowej. Introligatorstwo – Mała Poligrafia. Jelenia Góra 2006.
2. Łakomy M., Zabrodzki J.: Cyfrowe układy scalone. WNT. Warszawa
1980.
3. Pieńkos J., Turczyński J.: Układy scalone TTL w systemach cyfrowych.
WKiŁ. Warszawa 1986.
4. Sasal W.: Układy scalone serii UCY 74LS i UCY 74S. Parametry
i zastosowania. WKiŁ. Warszawa 1987.
5. Sasal W.: Układy scalone serii UCA 74/ UCY 74. Parametry
i zastosowania. WKiŁ. Warszawa 1985.
Literatura uzupełniająca:
76
1.
Układy logiczne. Ćwiczenia laboratoryjne. [red:] Łukowicz M. Oficyna
Wydawnicza Politechniki Wrocławskiej. Wrocław 2002.
2.
ATMEL - WinCUPL. User’s Manual. Copyright Atmel Corporation
1997.
3.
Advantech Equipment Corp.: LABTOOL-48XP. Intelligent Universal
Programmer. User’s Manual. Printed in Taiwan. July 2002.
4. NARZĘDZIA WSPOMAGAJĄCE PROJEKTOWANIE UKŁADÓW CYFROWYCH W STRUKTURACH PLD
4.1. Programy systemu CUPL
System CUPL (Compiler Universal for Programmable Logic) jest kompilatorem firmy LOGICAL DEVICES INC. Podstawowe jego zalety to:
• uniwersalność - moŜliwość zastosowania róŜnych typów układów PLD
i pamięci pochodzących od róŜnych producentów;
• prosta składnia - maksymalne uproszczenie języka przy zachowaniu
moŜliwie duŜych moŜliwości;
• samodokumentowanie się - konstrukcja pliku opisu logicznego nie
wymaga Ŝadnych dodatkowych opisów;
• łatwość współpracy z programatorami – mapa przepaleń tworzona jest
m.in. w formacie jedec, który jest najczęściej wykorzystywanym formatem w programatorach.
System CUPL tworzą następujące programy (rysunek 4.1):
o CUPL (Universal Compiler for Programmable Logic) - uniwersalny
kompilator do programowalnych układów. Pozwala on na translację
zbiorów dyskowych zapisanych w języku specyfikacji zadania na
zbiory zawierające rozkazy dla programatorów programowalnych
układów logicznych.
77
o CSIM (CUPL Simulator) - symulator układów logicznych zaprogramowanych kodem wytworzonym przez kompilator CUPL.
o CBLD (CUPL Build) - program zarządzający bibliotekami układów
logicznych dla kompilatora CUPL.
o PTOC (PALASM to CUPL Translator) - program do tłumaczenia
zbiorów dyskowych zapisanych w formacie programu PALASM na
format wejściowy kompilatora CUPL.
Rys. 4.1. Schemat współpracy programów systemu CUPL.
78
Zbiory wejściowe do kompilatora (rozszerzenie *.PLD) i symulatora (rozszerzenie *.SI) są zbiorami zawierającymi wyłącznie znaki ASCII.
Zbiory wyjściowe mogą być wyprowadzone w formatach:
- *.JED - plik wejściowy dla programatora z wektorami testowymi (2)
lub bez (1);
- *.HEX - plik wejściowy dla programatora układów PROM;
- *.HL - plik wejściowy dla programatora układów ImFL firmy Signetics;
- *.DOC - plik dokumentacji - zawiera rozszerzone równania logiczne
i tablice symboli zmiennych;
- *.LST - plik błędów - lista błędów kompilacji;
- *.SO - plik błędów wykrytych podczas symulacji;
- *.MX - plik zawierający rozwinięcie makr.
Kompilator CUPL moŜe słuŜyć jako program translacji na format Berkeley (*.PLA) oraz dodatkowo produkuje zbiór dla potrzeb symulatora
(*.ABS).1
4.2. Podstawy języka CUPL
Język CUPL słuŜy do tekstowego opisu układu cyfrowego. UmoŜliwia jego specyfikację przez podanie równań logicznych lub przez opis procedury
przy uŜyciu instrukcji własnych. Dodatkowe moŜliwości organizacji tekstu
źródłowego udostępnia preprocesor podobny w składni do preprocesora języka C. Podczas tworzenia projektu dobrze jest zastosować metodę analizy:
„góra-dół”. Oznacza to, Ŝe naleŜy zacząć od ogólnego zarysu projektu,
a później przesuwać się cały czas w głąb, definiując kolejne elementy.
1
Łuba T., Markowski M. A., Zbierzchowski B. Kompilatory układów logicznych. Oficyna
Wydawnicza PW. Warszawa 1995.
79
Tekst opisu przechowywany jest w niesformatowanych plikach tekstowych o rozszerzeniu *.PLD. Do symulacji niezbędny jest dodatkowo plik
o rozszerzeniu *.SI.
4.2.1. Elementy składni języka
Komentarze
Komentarze moŜna zamieszczać w pliku źródłowym. Rozpoczynają się
i kończą znakami /*
*/. Tekst umieszczony między tymi symbolami trak-
towany jest jako komentarz. Znaki te mogą obejmować jedną i więcej linii koniec linii nie oznacza końca komentarza.
Przykłady:
1.
/*******************************************/
/*
To jest przyklad tworzenia tytulu lub
*/
/*
bloku informacyjnego pliku zrodlowego*
/
/*******************************************/
2.
/*
Inny przyklad tworzenia bloku informacyjnego
*/
3.
out1=in1 # in2;
/* Funkcja OR
*/
out2=in1 & in2;
/* Funkcja AND */
out3=in1 $ in2;
/* Funkcja XOR */
Komentarz jest ignorowany przez kompilator. Plik źródłowy nie powinien
zawierać kodów rozszerzonych (m.in. polskich znaków).
Zmienne
Zmienne są ciągami znaków alfanumerycznych (cyfry, litery, podkreślenia) zawierające co najmniej jedną literę. Określają one wyprowadzenia układu (pin), wewnętrzne węzły (node), stałe, sygnały wejściowe, wyjściowe oraz
pośrednie lub zbiory sygnałów. Nazwy zmiennych mogą składać się maksymalnie z 31 znaków (przy dłuŜszych nazwach są one obcinane do 31 zna80
ków). W języku CUPL wyróŜnia się duŜe i małe litery. W skład nazwy
zmiennej nie moŜe wchodzić spacja. Nazwy zmiennych nie mogą być nazwami zarezerwowanych symboli języka CUPL (tabela 4.1) oraz nazwami
zastrzeŜonymi słów kluczowych (tabela 4.2).
Tabela 4.1. Zarezerwowane symbole języka CUPL.
&
#
(
)
-
*
+
[
]
/
:
.
..
/*
*/
;
,
!
'
=
@
$
^
%
Tabela 4.2. Zarezerwowane słowa kluczowe języka CUPL.
APPEND
CONDITION
DEVICE
FORMAT
IF
MACRO
OUT
PRESENT
SEQUENCED
TABLE
ASSEMBLY
DATE
ELSE
FUNCTION
JUMP
MIN
PARTNO
REV
SEQUENCEJK
ASSY
DEFAULT
FIELD
FUSE
LOC
NAME
PIN
REVISION
SEQUENCERS
COMPANY
DESIGNER
FLD
GROUP
LOCATION
NODE
PINNODE
SEQUENCE
SEQUENCET
Przykłady poprawnych nazw zmiennych:
a0,
A0,
8250_ENABLE,
Real_time_clock_interrupt_address;
81
Zmienne indeksowe
Są to zmienne zawierające w nazwie numer. Zakończone zawsze liczbą
dziesiętną z zakresu od 0 do 31. Zmiennymi takimi mogą być nazwy opisujące linie adresowe, linie danych lub inne kolejno numerowane elementy. Indeksowanie najlepiej zaczynać od zera. Zmienna z indeksem 0 zawsze oznacza najmniej znaczący bit.
Przykłady poprawnych zmiennych indeksowych:
a23,
D07,
D7,
counter_bit_3.
Zmienne D07 i D7 są róŜnymi zmiennymi.
Listy
Listy są obiektami umoŜliwiającymi skrócony zapis grupy zmiennych. Są
one powszechnie uŜywane przy deklaracji wielu wyprowadzeń i węzłów, deklaracji pól bitowych, równań logicznych i zbioru operacji. Nawiasy prostokątne [
] ograniczają zasięg deklaracji listy.
Format listy ma postać:
[zm1, zm2, … zmn]
Gdy zmienne są indeksowe, moŜna zastosować skróconą notację;
[zmm..n]
gdzie: m - pierwszy indeks w liście,
n – ostatni indeks w liście.
Przykłady:
[UP, DOWN, LEFT, RIGHT]
[A0, A1, A2, A3, A4, A5, A6, A7]
[A0..2, A3, A4, A5..7]
[A0..7, B0..3]
82
Stałe liczbowe
Liczby mogą być reprezentowane w jednym z czterech dostępnych formatów: binarnym - ‘b’, ósemkowym - ‘o’, dziesiętnym - ‘d’ oraz szesnastkowym
- ‘h’. W pliku źródłowym przyjmuje się przez domniemanie, Ŝe uŜywane stałe
są w zapisie szesnastkowym, oprócz liczb określających numery wyprowadzeń (pin) i indeksów zmiennych indeksowych, dla których przyjmuje się, Ŝe
są w systemie dziesiętnym.
Wszystkie operacje na liczbach realizowane są z dokładnością 32-bitową,
daje to zakres wartości od 1 do 232- 1. W zapisach dwójkowych, ósemkowych
i szesnastkowych liczby w swym zapisie mogą zawierać znak X - wartość
nieoznaczona. Przykłady zapisu liczb w czterech formatach przedstawia tabela 4.3.
Tabela 4.3. Zapis liczb w języku CUPL.
Format
Liczba
Wartość dziesiętna
Dwójkowy
‘b’0 lub ‘B’0
0
Dwójkowy
‘b’1101 lub ‘B’1101
13
Ósemkowy
‘o’663 lub ‘O’663
435
Ósemkowy
(zakres wartości)
‘O’[300..477]
192..314
Dziesiętny
‘d’79 lub ‘D’79
79
Szesnastkowy
‘h’BA lub ‘H’BA
186
Deklaracje
Deklaracje wyprowadzeń z układu pin
Deklaracja pin przypisuje nazwy (zmienne) dla sygnału na wyprowadzeniu układu scalonego o podanym numerze oraz określa jego polaryzację.
Składnia ma postać:
PIN pin_n=[!]zm;
83
gdzie: PIN - wymagane słowo kluczowe,
pin_n - zapisany dziesiętnie numer wyprowadzenia obudowy,
zm - nazwa (zmienna) przypisanego sygnału,
! - definiowanie polaryzacji sygnału wejściowego lub wyjściowego,
polaryzacja ujemna,
= - operator przypisania, który powoduje przypisanie wartości wyraŜenia zmiennej lub liście zmiennych,
Przykłady:
pin 1 =
clock;
/* Register Clock */
pin 2 =
!enable; /* Enable I/O Port */
pin [3,4] =
![stop,go]; /* Control Signals */
pin [5..7] =
[a0..2]; /* Address Bits 0-2 */
W deklaracji wyprowadzeń z układu nie podaje się, czy dane wyprowadzenie jest wejściem, wyjściem albo jest dwukierunkowe.
Deklaracje węzłów node, pinnode
Niektóre układy PLD zawierają zasoby wewnętrzne, które generują funkcje logiczne, ale nie są dostępne bezpośrednio z wyprowadzeń zewnętrznych
układu. Dostęp do nich jest moŜliwy przez zdefiniowanie węzłów wewnętrznych (buried).
W celu zdeklarowania zmiennych dla ukrytych funkcji uŜywa się słowa
kluczowego NODE, którego format jest następujący:
NODE [!] zm;
gdzie: NODE - wymagane słowo kluczowe,
! – opcjonalnie, określa polaryzację sygnału,
zm – nazwa (zmienna) przypisanego sygnału.
Przykład:
84
NODE [State0..5];
/* wewnetrzne bity stanu */
NODE !Invert;
/* For Complement Array */
W celu wyraźnego zdefiniowania ukrytych węzłów uŜywa się słowa kluczowego PINNODE. UmoŜliwia ono połączenie węzła o numerze n ze
zmienną. Format deklaracji jest następujący:
PINNODE node_n = [!]zm;
gdzie: PINNODE - wymagane słowo kluczowe,
node_n – numer węzła w zapisie dziesiętnym,
! - opcjonalnie, określa polaryzację sygnału,
zm - nazwa (zmienna) przypisanego sygnału.
= - operator przypisania, który powoduje przypisanie wartości wyraŜenia zmiennej lub liście zmiennych,
Przykład:
PINNODE [29..34] = [State0..5];
PINNODE 35 = !Invert;
Deklaracje pól bitowych
Deklaracja pola bitów łączy pojedynczą zmienną z grupą bitów. Gdy uŜyte
zostanie słowo kluczowe FIELD, kompilator generuje pojedynczą 32-bitową
zmienną, która jest uŜywana do reprezentacji zmiennych w polu bitowym.
Składnia ta jest głównie uŜywana do definicji adresów i szyn danych. Format
jest następujący:
FIELD zm = [zm1, zm2, ... zmn];
Przykład:
FIELD count=[Q3..0];
FIELD mode =[clr,dir];
Zmienna utworzona za pomocą słowa kluczowego FIELD moŜe zawierać
maksymalnie 32 bity.
Operatory logiczne
Operatorami logicznymi moŜna działać na zmienne i listy - wynikami są
odpowiednio zmienne i listy. W języku CUPL dostępne są cztery standardowe operatory logiczne: NOT, AND, OR, XOR.
85
Sposób zapisu operacji logicznych oraz kolejność wykonania przedstawia
tabela 4.4.
Tabela 4.4. Operatory logiczne.
Operator
Opis
!
NOT- negacja (dopełnienie)
!A
1
&
AND - koniunkcja
A&B
2
#
OR - alternatywa
A#B
3
$
XOR - róŜnica symetryczna
A$B
4
Przykład Kolejność
Przykłady:
bitowe operatory logiczne.
WyraŜenie:
[A0, Al, A2, A3] # [B0, B1, B2, B3];
jest równowaŜne wyraŜeniu:
[AO # B0, A1 # B1, A2 # B2, A3 # B3];
listowe operatory logiczne.
WyraŜenie:
[D0, D1, D2, D3] &;
jest równowaŜne wyraŜeniu ;
D0 & D1 & D2 & D3;
Operatory arytmetyczne i równań
Operatorami arytmetycznymi moŜna działać na zmienne i listy - wynikami
są odpowiednio zmienne i listy. W języku CUPL dostępnych jest sześć operatorów arytmetycznych: potęgowanie, mnoŜenie, dzielenie, moduł, dodawanie,
odejmowanie.
Sposób zapisu operacji arytmetycznych oraz kolejność wykonania przedstawia tabela 4.5.
86
Tabela 4.5. Operatory arytmetyczne i równań.
Operator
Opis
Przykład Kolejność
**
Potęgowanie
2**3
1
*
MnoŜenie
2*4
2
/
Dzielenie
6/3
2
%
Modulo
7%5
2
+
Dodawanie
4+5
3
-
Odejmowanie
6-4
3
Równania logiczne
Równania logiczne umoŜliwiają połączenie zacisków wejściowych z wyjściowymi poprzez zaprojektowane funkcje. Sposób zapisu równań jest następujący:
[!]zm[.ext] = wyr;
gdzie: zm - pojedyncza zmienna lub lista zmiennych, zdefiniowana zgodnie z zasadami notacji listowej,
.ext - opcjonalne rozszerzenie umoŜliwiające przyłączenie funkcji
do większości węzłów wewnątrz programowalnych układów,
wyr - wyraŜenie będące kombinacją zmiennych i operatorów logicznych,
= - operator przypisania, który powoduje przypisanie wartości wyraŜenia zmiennej lub liście zmiennych,
! – definiowanie polaryzacji sygnału, w tym kontekście jest to zanegowanie wyraŜenia stojącego po prawej stronie znaku.
Jeśli zm nie jest nazwą (zmienną) zadeklarowaną uprzednio w instrukcji
PIN i NODE, kompilator automatycznie przyjmie, Ŝe równanie definiuje nową zmienną wewnętrzną, do której moŜna się odwołać w innych wyraŜeniach
logicznych.
Q0.D=Q1 & Q2 & Q3; /* Wyjscie w D flip-flop */
87
Q1.J = Q2 # Q3;
/* Wyjscie w JK flip-flop */
Q1.K = Q2 & !Q3;
MREQ=READ # WRITE; /* Zmienna posrednia */
[D0..3] = 'h'FF;
/* Przyporzadkowanie wartosci
stałej */
W miejsce zm moŜe w równaniu wystąpić notacja listowa; w takim wypadku równanie logiczne stosuje się do kaŜdego elementu listy indywidualnie,
np.:
Przykłady:
[Q2..0].OE=!PinOE; ⇔
Q2.OE=!PinOE;
Q1.OE=!PinOE;
Q0.OE=!PinOE;
Instrukcja APPEND
Standardowo w równaniach logicznych tylko jedno wyraŜenie moŜe być
połączone z jedną zmienną. Słowo kluczowe APPEND umoŜliwia połączenie
jednej zmiennej z wieloma wyraŜeniami. Sposób uŜywania APPEND jest
identyczny do definiowanych równań logicznych, z tym Ŝe słowo kluczowe
występuje na początku kaŜdego równania. Instrukcja ma postać:
APPEND [!]zm[.ext] = wyr;
Wynikiem stosowania słowa APPEND jest suma logiczna OR dla wszystkich wyraŜeń.
Przykład:
APPEND Y = A0 & A1;
APPEND Y = B0 & B1;
APPEND Y = C0 & C1;
PowyŜsze trzy równania są równowaŜne równaniu:
Y = A0 & A1 # B0 & B1 # C0 & C1;
88
Operacje na zbiorach
Wszystkie operacje mogą być wykonywane na pojedynczych bitach (przykładowo na sygnałach wejściowych) lub na informacjach zgrupowanych
w zbiory. Operacje na zbiorach moŜna stosować pomiędzy zbiorem a zmienną lub wyraŜeniem, lub pomiędzy dwoma zbiorami. Wynikiem operacji między zbiorem a zmienną (lub wyraŜeniem) jest nowy zbiór, w którym operacje
są wykonywane pomiędzy kaŜdym elementem i zmienną (lub wyraŜeniem).
JeŜeli operacja wykonywana jest na dwóch zbiorach, muszą mieć one te same
rozmiary (ilość elementów). W wyniku powstaje nowy zbiór złoŜony z elementów stanowiących wynik operacji pomiędzy elementami kaŜdego ze zbiorów.
Przykład:
WyraŜenie
[D0, D1, D2, D3] & read
jest równowaŜne
[D0 & read, D1 & read, D2 & read, D3 & read]
Gdy operacje są wykonywane pomiędzy dwoma zbiorami, zbiory muszą
mieć taki sam wymiar (tzn. taką samą liczbę elementów). Wynikiem operacji
między zbiorami jest nowy zbiór, w którym operacje są wykonywane pomiędzy kolejnymi elementami kaŜdego ze zbiorów.
Przykład:
WyraŜenie:
[A0, A1, A2, A3] & [B0, B1, B2, B3]
jest równowaŜne
[A0 & B0, A1 & B1, A2 & B2, A3 & B3]
Do grupowania zmiennych w zbiór, który moŜe być identyfikowany poprzez jedną zmienną słuŜy słowo kluczowe FIELD.
Przykład:
FIELD a_inputs = [A0, A1, A2, A3];
89
FIELD b_inputs = [B0, B1, B2, B3];
Operacja iloczynu logicznego pomiędzy zbiorami wygląda następująco:
a_inputs & b_inputs
Przy operacjach pomiędzy zbiorami i liczbami, liczby są traktowane jako
maska bitów.
Przykładowo przedstawiono równania logiczne dla 4-bitowego licznika:
FIELD count=[Q3..0];
cound.d = ‘b’0001 & (!Q0)
# ‘b’0010 & (Q1 $ Q0)
# ‘b’0100 & (Q2 $ Q1 & Q0)
# ‘b’1000 & (Q3 $ Q2 & Q1 &Q0);
Są one równowaŜne równaniom:
Q0.d = ! Q0;
Q1.d = Q1 $ Q0;
Q2.d = Q2 $ Q1 & Q0;
Q3.d = Q3 $ Q2 & Q1 & Q0;
Operator równości
Operator równości pozwala sprawdzić równość pomiędzy zbiorami
zmiennych a stałą na poziomie poszczególnych pozycji bitowych. Realizuje
pojedyncze wyraŜenie logiczne. Pozycje binarne w zmiennej są porównywane
z odpowiadającymi im pozycjami w zbiorze. Gdy pozycja binarna w zmiennej jest równa 1, element w zbiorze pozostaje niezmieniony, gdy jest równa 0
element zostaje zanegowany, gdy jest równa binarnemu X element zostaje
usunięty. Wynikowe elementy zostają przekształcone w postać koniunkcji,
celem stworzenia pojedynczych wyraŜeń. Format operatora równości jest następujący:
1. [zm1, zm2, ... , zmn]: constant;
2. bit_fileld_zm: constant;
90
gdzie:
[zm1, zm2, ... , zmn] - zbiór zmiennych,
constant - stała (standardowo w kodzie szesnastkowym),
bit_field_zm - zmienna zdefiniowana za pomocą słowa kluczowego FIELD,
: - operator równości.
Przykład:
WyraŜenia
1. select = [A3..0]:’h’D;
2. select = [A3..0]:'b'1X0X;
są równowaŜne
1. select = A3 & A2 & !A1 & A0 ;
2. select = A3 & !A1 ;
Operator równości moŜna równieŜ wykorzystać, gdy operacje wykonywane są na identyczności. Format jest następujący:
[zm, zm,..., zm]:op;
co jest równowaŜne
zm op zm op ... zm;
gdzie: op - operator logiczny,
zm – zmienna.
Przykład:
WyraŜenia
[A3,A2,A1,A0]:&
[B3,B2,B1,B0]:#
[C3,C2,C1,C0]:$
są równowaŜne wyraŜeniom
A3 & A2 & A1 & A0
B3 # B2 # B1 # B0
C3 $ C2 $ C1 $ C0
91
Operator równości moŜe być takŜe stosowany do tworzenia funkcji tablicowej wyjściowych wartości. Dla przykładu przedstawiono zapis równań logicznych tabeli stanów zapisanej w tabeli 4.6.
Tabela 4.6. Tabela prawdy.
in2
in1
in0
out1
out0
0
0
0
0
0
0
0
0
1
1
1
1
0
1
1
0
0
1
1
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
0
1
1
1
0
1
Przykład:
FIELD
input = [in2..0];
FIELD
output = [out1, out0] ;
output=input:0&[0,0]#input:1&[0,1]#input:2&[1,0]&input:3[0,1]
#input:4&[1,1]#input:5&[0,1]#input:6&[1,0]&input:7[1,1]
Operacje na zakresach liczb
Operacje na zakresach liczb są podobne do operatora równości, przy czym
stałą zastępuje zbiór stałych o określonym zakresie ograniczonym nawiasami
[ ]. Operacja ta sprawdza równość pomiędzy zbiorem zmiennych a kaŜdą ze
stałych znajdujących się w obrębie rozwaŜanego zakresu. Format jest
następujący:
1. [zm1, zm2, ..., zmn]:[stala_lo..stala_hi];
2. bit_field_zm:[stala_lo..stala_hi];
gdzie: [zm1, zm2, ..., zmn] - zbiór zmiennych,
stala_lo, stala_hi - liczby definiujące zakres operacji.
92
Przykład:
FIELD address =[A3..0]; /* definicja szyny adresowej */
WyraŜenie
select = address:[C..F]; /* rownanie zakresu */
jest równowaŜne
select = address:C # address:D # address:E # address:F;
co moŜna rozwinąć do postaci:
select = A3 & A2 & !A1 & !A0
# A3 & A2 & !A1 & A0
# A3 & A2 & A1 & !A0
# A3 & A2 & A1 & A0;
Tablice prawdy
W niektórych przypadkach najłatwiejszym sposobem zapisu równań logicznych jest zastosowanie metody opisowej, czyli tablicy prawdy. CUPL
umoŜliwia za pomocą słowa kluczowego TABLE utworzyć taką tablicę.
W tablicy prawdy naleŜy zdefiniować zaleŜności pomiędzy kombinacjami
zmiennych wejściowych i wyjściowych, a następnie sprecyzować jednoznaczne powiązania pomiędzy zdekodowanymi wartościami wejścia i listą
zmiennych wyjściowych. Format uŜycia operatora TABLE jest następujący:
TABLE zm_list_1 ⇒ zm_list_2
{
input_0 => output_0;
.........................
input_n => output_n;
}
gdzie: zm_list_1 - określenie zmiennych wejściowych,
93
zm_list_2 - określenie zmiennych wyjściowych,
input_n - wartość lub lista wartości zmiennych wejściowych
odpowiadających stanowi n,
output_n - wartość lub lista wartości zmiennych wyjściowych odpowiadających stanowi n,
=>
- operator powiązania zmiennych wejściowych z wyjściowymi.
Przykład:
opis dekodera kodu szesnastkowego na kod BCD
FIELD
input = [in3..0] ;
FIELD
output = [out4..0] ;
TABLE
input => output
{
0=>00; 1=>01;
2=>02;
3=>03;
4=>04; 5=>05;
6=>06;
7=>07;
8=>08; 9=>09;
A=>10;
B=>11;
C=>12; D=>13;
E=>14;
F=>15;
}
Instrukcja CONDITION
Słowo kluczowe CONDITION umoŜliwia opis funkcji logicznych na wyŜszym poziomie niŜ pozwala na to pisanie standardowych równań logicznych.
Instrukcja ma postać:
CONDITION
{
IF wyr0 OUT
.
.
94
zm0;
IF wyrn OUT
DEFAULT
zmn;
OUT
zmM ;
}
gdzie: wyrX
- wyraŜenie logiczne złoŜone ze zmiennych wejściowych
funkcji,
zmX
- nazwa (zmienna) zadeklarowana w instrukcji PIN lub
grupa takich nazw (zmiennych) zapisanych w notacji listowej,
Zapis taki oznacza, Ŝe zmienna zmX ma być ustawiona w stan aktywny
(jeden lub zero w zaleŜności od polaryzacji podanej w deklaracji PIN), gdy
spełniony jest warunek wyrX; jeŜeli Ŝaden z warunków nie jest spełniony,
układ ustawia wyjścia wg opcjonalnej instrukcji DEFAULT.
Przykład:
opis dekodera dwuwejściowego na kod 1 z 4
PIN [1,2] = [A,B]; /* Data Inputs */
PIN 3 = !enable;
/* Enable Input */
PIN [12..15] = [Y0..3]; /* Decoded Outputs */
PIN 14 = no_match; /* Match Output */
CONDITION
{
IF enable & !B & !A
out
Y0;
IF enable & !B & A
out
Y1;
IF enable & B & !A
out
Y2;
IF enable & B & A
out
Y3;
}
95
Rozszerzenia
Rozszerzenia mogą być dodawane do nazw zmiennych w celu wskazania
specyficznych funkcji powiązanych z głównymi węzłami wewnątrz programowalnego układu. Kompilator sprawdza rozszerzenie zmiennej w celu
stwierdzenia, czy jest ono poprawne dla wybranego programowalnego układu
oraz czy jego uŜycie nie jest w konflikcie z innymi uŜytymi rozszerzeniami.
CUPL uŜywa tych rozszerzeń, Ŝeby skonfigurować makrokomórki układu
PLD. MoŜna w ten sposób wykorzystać wbudowane w strukturę układu przerzutniki oraz bufory trójstanowe.
Na rysunku 4.2 przedstawiono przykład uŜycia rozszerzeń zmiennych.
Rys. 4. 2. Obwód ilustrujący uŜycie rozszerzeń.
Tabela 4.7 przedstawia listę najczęściej uŜywanych rozszerzeń. Kompletną
listę moŜna znaleźć w podręczniku „CUPL PLD/FPGA Language Compiler”
(Wincupl2→Help→ CUPL Programmers Reference).
96
Tabela 4.7. Lista rozszerzenia zmiennych.
Rozszerzenie
Strona
podstawienia
.AP
L
Asynchroniczne ustawienie przerzutnika.
.AR
L
Asynchroniczne zerowanie przerzutnika.
.CE
L
Wejście zezwalające CE.
.CK
L
Programowalny zegar przerzutnika.
.CKMUX
L
Wybór multipleksowanego zegara.
.D
L
Wejście informacyjne przerzutnika typu D.
.DFB
R
Wyjście przerzutnika D w trybie kombinacyjnym
makroceli.
.DQ
R
Wyjście Q przerzutnika typu D.
.INT
R
Zwrotny sygnał z wewnętrznego wyjścia rejestrowego.
.IO
R
SprzęŜenie zwrotne od końcówki wyjściowej.
.IOD
R
SprzęŜenie zwrotne przez przerzutnik typu D.
.IOL
R
SprzęŜenie zwrotne przez „latch”.
.J
L
Wejście J przerzutnika typu JK.
.K
L
Wejście K przerzutnika typu JK.
.L
L
Wejście informacyjne przerzutnika typu „latch”.
.LE
L
Wyjście Latch Enable przerzutnika typu „latch”.
.LQ
R
Wyjście Q przerzutnika typu „latch”.
.OE
L
Programowalne Output Enable.
.R
L
Wejście R przerzutnika typu RS.
.S
L
Wejście S przerzutnika typu RS.
.SP
L
Wejście synchronicznego ustawiania przerzutnika.
.T
L
Wejście T przerzutnika typu T.
.TFB
R
Wyjście przerzutnika T w trybie kombinacyjnym
makroceli.
Opis
97
Rozszerzenie .AP:
Rozszerzenie .AP stosowane jest celem zdefiniowania wyraŜenia dla asynchronicznego sygnału ustawienia przerzutnika. Na przykład, wyraŜenie
"Y.AP = A & B;" powoduje, Ŝe przerzutnik jest asynchronicznie ustawiany, kiedy A i B są logicznie prawdziwe.
Rozszerzenie .AR:
Rozszerzenie .AR stosowane jest celem zdefiniowania wyraŜenia dla
asynchronicznego sygnału zerowania przerzutnika. Jest ono stosowane dla
układów mających jedną lub więcej linii zaleŜności podłączonych do asynchronicznego przerzutnika.
Rozszerzenie .CE:
Rozszerzenie .CE stosowane jest przy wykorzystaniu przerzutników typu
D, które posiadają wejścia wyzwalane zegarem (przerzutniki D-CE). SłuŜy do
sprecyzowania wejść do termu CE (Clock Enable) przerzutnika. JeŜeli są nie
98
uŜywane, winny być ustawione w stan 1 - przerzutnik zachowuje się jak przerzutnik typu D.
Rozszerzenie .CK:
Rozszerzenie .CK stosowane jest do określenia zegara sterującego określonym termem. UŜywamy go celem podłączenia zegara przerzutnika do dedykowanego pinu.
Rozszerzenie .CKMUX:
Rozszerzenie .CKMUX stosowane jest do podłączenia zewnętrznego zegara sterującego przerzutnikiem. UŜywanie rozszerzenia . CKMUX jest bardziej
wydajne niŜ uŜywanie rozszerzenia .CK.
Rozszerzenie .D:
Rozszerzenie .D stosowane jest do określenia wejścia D do przerzutnika.
Opcja ta powoduje skonfigurowanie przez kompilator makrokomórki w układach PLD jako przerzutnik typu D.
99
Rozszerzenie .DFB:
Rozszerzenie .DFB stosowane jest do skonfigurowania makrokomórek jako wyjście kombinacyjne w trybie kombinacyjnym. Rozszerzenie .DBF pozwala na realizację funkcji wejścia lub wyjścia jako podzestaw funkcji wejściowo-wyjściowej (I/O function).
Rozszerzenie .DQ:
Rozszerzenie .DQ stosowane jest do sprecyzowania wejścia D do przerzutnika. Opcja ta powoduje automatyczne ustawienie wejścia jako rejestrowe. Nie jest ono uŜywane do sprecyzowania wyjścia Q przerzutnika D.
Rozszerzenie .INT:
Rozszerzenie .INT stosowane jest do określenia wewnętrznej ścieŜki połączeń zwrotnych. MoŜe być wykorzystane do określenia ścieŜek zwrotnych
100
kombinatoryki typu „buried” zarówno dla wejść rejestrowych oraz kombinacyjnych.
Rozszerzenie .IO:
Rozszerzenie .IO stosowane jest do zaznaczenia połączeń zwrotnych pinów z komórkami. Jest ono przydatne gdy sam proces projektowy wymaga
uŜycia pinów I/O oraz logiki typu „buried” w obrębie tej samej makrokomórki. Jest równieŜ uŜyteczne przy implementacji dwukierunkowych wyjść
w CUPL.
Rozszerzenie .J i .K:
Rozszerzenie .J i .K stosowane jest do określenia wejść J-K do przerzutnika. Opcja ta powoduje skonfigurowanie przez kompilator makrokomórki w
układach PLD jako przerzutnika typu J-K.
Rozszerzenie .L:
101
Rozszerzenie .L stosowane jest do określenia wejść typu „zatrzask” (latch). Opcja ta powoduje skonfigurowanie przez kompilator makrokomórki w
układach PLD jako przerzutnika typu zatrzask.
Rozszerzenie .LE:
Rozszerzenie .LE stosowane jest do określenia równań obsługujących
przerzutniki typu „zatrzask” (latch). Jest wymagane przy projektowaniu
z wykorzystaniem moŜliwości wyzwalania przerzutników poziomem. Powoduje ono, Ŝe term produkcji łączony jest z blokiem LE.
Rozszerzenie .LQ:
Rozszerzenie .LQ stosowane jest do specyfikacji zatrzasku wejściowego
(input latch). Opcja ta powoduje automatyczne ustawienie wejścia jako zatrzaskowe (latched).
Rozszerzenie .OE:
102
Rozszerzenie .OE stosowane jest do specyfikacji sygnału wyjściowego dla
termu produkcji. Jest wymagane przy wykorzystywaniu dwukierunkowych
pinów I/O oraz indywidualnie programowalnych termów wyjściowych.
Rozszerzenie .S i .R:
Rozszerzenie .S i .R stosowane jest do określenia wejść S-R do przerzutnika. Opcja ta powoduje skonfigurowanie przez kompilator makrokomórki
w układach PLD jako przerzutniki typu S-R.
Rozszerzenie .SP:
Rozszerzenie .SP stosowane jest do ustawienia synchronicznego wejścia
ustawiającego preset przerzutnika na określone wyraŜenie. Na przykład równanie
Y.SP = A & B; /*gdzie A i B sa wejsciami*/
Powoduje, Ŝe wyjście Y jest ustawiane synchronicznie z zegarem lokalnym uŜytym w makroceli, gdzie wejścia A i B są logicznie prawdziwe.
Rozszerzenie .T:
103
Rozszerzenie .T stosowane jest do określenia wejścia T do przerzutnika.
Opcja ta powoduje skonfigurowanie przez kompilator makrokomórki
w układach PLD jako przerzutniki typu T.
Rozszerzenie .TFB:
Rozszerzenie .TFB stosowane jest wówczas, gdy mikrokomórka jest ustawiona na kombinacyjne wyjście, ale przerzutnik T pozostaje podłączony do
wyjścia. Rozszerzenie .TEB pozwala na sprzęŜenie zwrotne rejestrowej reprezentacji kombinacyjnego wyjścia z powrotem do układu programowalnego.
4.2.2. Preprocesor
Kompilator języka CUPL zawiera preprocesor umoŜliwiający makrogenerację, generację warunkową oraz włączenie do programów zawartości wskazanych plików.
Wiersze programu zaczynające się znakiem $ słuŜą do komunikacji
z preprocesorem. W instrukcjach tych nie występuje znak średnika ani znak
przypisania.
Instrukcje rozpoznawane przez preprocesor przedstawia tabela 4.8.
Tabela 4.8. Instrukcje preprocesora.
104
$DEFINE
$IFDEF
$UNDEF
$ELSE
$IFNDEF
$REPEAT
$ENDIF
$INCLUDE
$REPEND
$MACRO
$MEND
W instrukcjach preprocesora duŜe i małe litery nie są rozróŜnialne, ale
zwyczajowo pisze się je duŜymi literami.
Instrukcja $DEFINE
Instrukcja $DEFINE zastępuje ciąg znakowy przez określony operator,
liczbę lub zmienną. Format instrukcji jest następujący:
$DEFINE argument1 argument2
gdzie: argument1 - ciąg znakowy,
argument2 - operator, liczba lub zmienna.
Przykład:
$DEFINE ON
'b'1
$DEFINE OFF
‘b'0
$DEFINE PORTC 'h'3F0
$DEFINE pozwala równieŜ tworzyć osobisty zbiór logicznych operatorów.
Przykład:
$DEFINE
{
/*
zastepuje poczatek komentarza
$DEFINE
}
*/
zastepuje koniec komentarza
$DEFINE
/
!
zastepuje Negacje
$DEFINE
*
&
zastepuje AND
$DEFINE
+
#
zastepuje OR
$DEFINE
:+: $
zastepuje XOR
Instrukcja $UNDEF
Instrukcja $UNDEF odwraca działanie komendy $DEFINE. Zleca zaprzestanie zastępowanie identyfikatora. Format instrukcji jest następujący:
$UNDEF argument
gdzie: argument - ciąg znakowy uŜyty w komendzie $DEFINE.
Instrukcję $UNDEF moŜna uŜyć do przedefiniowania ciągu znakowego.
Przykład:
Pin [3..6] = [in3..0];
105
$DEFINE S0 ‘B’0010
select1 =[in3..0]:’S0;
$UNDEF S0
$DEFINE S0 ‘B’1000
select2=[in3..0]:S0;
Instrukcja $INCLUDE
Instrukcja $INCLUDE zleca wstawienie w jej miejsce zawartości pliku
o podanej nazwie. Format instrukcji jest następujący:
$INCLUDE filename
gdzie: filename – nazwa zbioru dyskowego.
Instrukcja $IFDEF
Instrukcja $IFDEF sprawdza, czy identyfikator jest aktualnie zdefiniowany w preprocesorze. Format instrukcji jest następujący:
$IFDEF argument
Instrukcja $IFNDEF
Instrukcja $IFNDEF sprawdza, czy identyfikator nie jest aktualnie zdefiniowany w preprocesorze. Format instrukcji jest następujący:
$IFNDEF argument
Po instrukcjach sterujących $IFDEF oraz $IFNDEF następuje dowolna
liczba wierszy programu, wśród których moŜe wystąpić wiersz:
$ELSE
Całą konstrukcję kończy instrukcja:
$ENDIF
Przykład:
$DEFINE Prototype X /* define Prototype*/
$IFDEF Prototype
pin 1 = memreq;
/* memory request on
*/
/* pin 1 of prototype*/
pin 2 = ioreq;
106
/* I/O request on*/
/* pin 2 of prototype*/
$ELSE
pin 1 = ioreq;
/* I/O request on*/
/* pin 1 of PCB*/
pin 2 = memreq;
/* memory request on
*/
/* pin 2 of PCB*/
$ENDIF
JeŜeli sprawdzony warunek jest prawdziwy, to wszystkie wiersze pomiędzy $ELSE i $ENDIF są ignorowane. Natomiast, jeŜeli warunek jest fałszywy, to są ignorowane wiersze pomiędzy testem a instrukcją $ELSE lub $ENDIF w przypadku braku $ELSE.
4.2.3. Opis automatów
Model układu sekwencyjnego w języku CUPL przedstawia rysunek 4.3.
UŜywa on sześciu komponentów: wejść, logiki kombinacyjnej, rejestrów
składowych, bitów stanu, wyjść rejestrowych i wyjść kombinacyjnych.
Rys. 4.3. Model układu sekwencyjnego.
Wejścia - sygnały wejściowe do układu mające swój początek w innym
układzie.
Logika kombinacyjna - dowolna kombinacja bramek logicznych (najczęściej AND i OR), które generują sygnał wyjściowy o czasie opóźnienia Tpd
(propagation delay time).
Rejestry składowe - przerzutniki, które otrzymują na wejście informacje
z logiki kombinacyjnej układu sekwencyjnego. Niektóre przerzutniki konfigu107
rowane są na potrzeby bitów stanu, inne na potrzeby rejestrowych wyjść. Rejestrowe wyjście charakteryzuje się czasem Tco (clock to out time), który reprezentuje opóźnienie pomiędzy zboczem sterującym sygnału zegara a wystąpieniem zmian na odpowiednim wyjściu przerzutnika.
Bity stanu - wyjścia przerzutników, które uŜywane są przy sprzęŜeniach
zwrotnych. Zawierają informacje o aktualnym stanie przerzutników.
Wyjścia kombinacyjne – wyjścia bezpośrednie z układu logiki kombinacyjnej. Mogą być funkcją bitu stanu lub sygnału wejściowego. Generują sygnał wyjściowy o czasie opóźnienia Tco + Tpd.
Wyjścia rejestrowe – wyjścia z układu przerzutników składowych.
Rysunek 4.4 przedstawia przebiegi czasowe na poszczególnych wejściach
i wyjściach układu sekwencyjnego.
Rys. 4.4. Przebiegi czasowe dla układu sekwencyjnego.
Aby zaimplementować układ sekwencyjny, CUPL udostępnia składnię,
która pozwala wykonać kaŜdą funkcję moŜliwą w automacie. śeby wprowa-
108
dzić funkcję logiczną za pomocą grafu przejść stanów, stosuje się składnię
złoŜoną ze słów kluczowych: SEQUENCE, PRESENT.
Opis układu sekwencyjnego jest moŜliwy przez zastosowanie instrukcji
o następującym formacie:
SEQUENCE state_zm_list
{
PRESENT
state_n0 statements;
.
.
.
PRESENT
state_nn statements;
}
gdzie: state_zm_list - lista zmiennych uŜywanych w grafie przejść
stanów,
state_n
- numer stanu i zdekodowana wartość z listy state_zm_list, jest on liczbą, która jest unikalna dla
kaŜdego stanu w składni SEQUNECE ..PRESENT,
statements - warunki lub wyraŜenia wyjściowe opisane w następnych sekcjach, słowa kluczowe NEXT, OUT, IF.
Przejścia warunkowe
W składni SEQUENCE .. PRESENT moŜna umieścić warunki, od których
będzie zaleŜało przejście między stanami. Format składni jest następujący:
SEQUENCE state_zm_list
{
PRESENT state_n
IF expr NEXT state_n OUT [!]zm ... OUT [!]zm;
..............
IF expr NEXT state_n OUT [!]zm ... OUT [!]zm;
[[DEFAULT] NEXT state_n OUT [!]zm;]
}
109
gdzie: NEXT: - słowo kluczowe określające stan następny.
OUT: - słowo kluczowe określające stan wyjścia powiązanego
z przejściem w określonym stanie.
IF:
- słowo kluczowe określające warunkową zmianę stanu.
Listę warunkowych instrukcji NEXT moŜe opcjonalnie kończyć instrukcja
DEFAULT. Określa ona do jakiego stanu automat ma się przełączyć, gdy Ŝaden z warunków wcześniejszych nie jest spełniony.
Instrukcję DEFAULT naleŜy stosować z rozwagą, poniewaŜ powoduje ona
dodanie warunku będącego negacją sumy wszystkich warunków wcześniejszych.
Sygnały generowane przez automat opisuje instrukcja OUT. Sygnały te
mogą być wyprowadzane jako kombinacyjne lub zatrzaskiwane w przerzutnikach. Mówimy wówczas o instrukcji OUT asynchronicznej lub synchronicznej. Ponadto sygnały te mogą zaleŜeć tylko od zmiennej stanu - sygnały bezwarunkowe - lub od zmiennych stanu oraz sygnałów wejściowych - sygnały
warunkowe.
4.2.4. Format pliku źródłowego
Struktura opisu pliku źródłowego powinna być zgodna z ustalonym szablonem i powinna zawierać następujące elementy:
nagłówek,
blok tytułowy,
deklarację wyprowadzeń układu (pinów),
definicję zmiennych przejściowych,
równania logiczne.
Opisy poszczególnych elementów pliku źródłowego zilustrowano rysunkami
programu
Wincupl
znajdującego
cupl\Examples\Atmel\Barrel22.pld.
110
się
w
katalogu
Win-
Nagłówek
Nagłówek (tabela 4.9) umoŜliwia identyfikację pliku źródłowego dla celów archiwalnych. Jest on umieszczany na początku pliku. Na jego podstawie
moŜna określić: autora, czas powstania projektu, typ wykorzystywanego
układu itp. CUPL dostarcza dziesięciu słów kluczowych do wykorzystania
w nagłówku. W przypadku braku któregokolwiek z nich, kompilator wysyła
komunikat z ostrzeŜeniem. Po słowach kluczowych musi znajdować się informacja zakończona znakiem średnika (rysunek 4.5).
Tabela 4.9. Nagłówek pliku źródłowego.
Słowa kluczowe
Znaczenie
Name
opis nazwy pliku (do 32 znaków - w systemie DOS do
8 znaków). Jeśli pole Name nie zawiera nazwy pliku,
CUPL nie wygeneruje pliku wynikowego.
Partno
określenie numeru części dla konkretnego projektu
(np.: opis układu, w którym znajduje się element) - nie
jest to nazwa typu elementu PLD.
Date
data ostatniej zmiany pliku źródłowego.
Revision
numer wersji kodu źródłowego (zaczynać od 01).
Designer
nazwisko i imię projektanta.
Company
nazwa firmy, dla której zaprojektowano układ.
Assembly
numer płytki drukowanej, na której będzie uŜyty układ.
Location
numer elementu na płytce.
Device
nazwa programowalnego układu logicznego (dla celów
kompilacji).
Format
format pliku wyjściowego:
h
- plik w formacie ASCII-hex,
i
- plik w formacie Signetics HL,
j
- plik w formacie JEDEC.
111
Rys. 4. 5. Struktura nagłówka.
Blok tytułowy
Blok tytułowy (rysunek 4.6) zawiera dodatkowe informacje opisujące projektowany układ. Tekst ujęty jest w znaki początku i końca komentarza.
Rys. 4.6. Struktura bloku tytułowego.
Deklaracje wyprowadzeń
W polu tym (rysunek 4.7) znajdują się deklaracje wyprowadzeń z układu:
wejść i wyjść poprzedzonych słowem kluczowym PIN. Deklaracje wyprowadzeń występują opcjonalnie, gdy zadeklarowany jest typ układu.
Rys. 4. 7. Struktura bloku deklaracyjnego.
112
Definicje zmiennych przejściowych
W polu tym (rysunek 4.8) znajdują się deklaracje wewnętrznych węzłów,
pól bitowych oraz innych zmiennych, którym chce się przyporządkować wartości początkowe. Deklarowane są zmienne pomocnicze w postaci tablic
(wektorów) zawierających nazwy zadeklarowanych wcześniej sygnałów lub
będących wynikiem operacji na tych sygnałach.
Rys. 4. 8. Struktura zmiennych przejściowych.
Równania logiczne
W polu tym (rysunek 4.9) wpisywane są równania boolowskie, tablice
prawdy układów logicznych oraz opis automatów (grafy przejść w formie
tekstowej).
Rys. 4. 9. Struktura opisu logicznego.
Przykładowy program
Barrel22.pld
Przykład opisu źródłowego 8-bitowego rejestru przesuwnego przedstawia
listing programu barrel22.pld
113
Name
Partno
Date
Revision
Designer
Company
Assembly
Location
Device
Barrel22;
CA0006;
05/11/89;
02;
Kahl;
Logical Devices, Inc.;
None;
None;
g22V10;
/**************************************************************/
/*
8-Bit Registered Barrel Shifter
*/
/* This 8-bit registered barrel shifter takes 8 data inputs
*/
/* and cyclically rotates the data from 0 to 7 places under
*/
/* control of the select ( S0, S1, S2 ) inputs. A SET input */
/* can be used to initialize the outputs to the all ones state*/
/**************************************************************/
/* Allowable Target Device Types : PAL22V10
*/
/**************************************************************/
/**
Inputs
**/
PIN
PIN
PIN
PIN
PIN
1
[2..9]
[10,11,14]
13
23
/**
Outputs
=
=
=
=
=
clock;
[D7..0];
[S2..0];
!out_enable;
preset;
/*
/*
/*
/*
/*
Register Clock
Data Inputs
Shift Count Select Inputs
Register Output Enable
Set to Ones Input
*/
*/
*/
*/
*/
**/
PIN [15..22] = [Q7..0];
/* Register Outputs
*/
/** Declarations and Intermediate Variable Definitions **/
field shift = [S2..0];
field input = [D7..0];
field output = [Q7..0];
/* Shift Width Field
/* Inputs Field
/* Outputs Field
*/
*/
*/
/** Logic Equations **/
output.d
=
#
#
#
#
#
#
#
[D7,
[D0,
[D1,
[D2,
[D3,
[D4,
[D5,
[D6,
D6,
D7,
D0,
D1,
D2,
D3,
D4,
D5,
D5,
D6,
D7,
D0,
D1,
D2,
D3,
D4,
D4,
D5,
D6,
D7,
D0,
D1,
D2,
D3,
D3,
D4,
D5,
D6,
D7,
D0,
D1,
D2,
D2,
D3,
D4,
D5,
D6,
D7,
D0,
D1,
D1,
D2,
D3,
D4,
D5,
D6,
D7,
D0,
D0]
D1]
D2]
D3]
D4]
D5]
D6]
D7]
&
&
&
&
&
&
&
&
shift:0
shift:1
shift:2
shift:3
shift:4
shift:5
shift:6
shift:7;
output.sp = preset;
/* synchronous preset
*/
output.oe = out_enable;
/* tri-state control
*/
output.ar = 'h'00;
/* asynchronous reset not used */
_
114
4.3. Program WinCUPL
WinCUPL jest zaadaptowaną wersją dla Windows DOS-owego programu
CUPL (Compiler Universal for Programmable Logic). Filozofia obsługi i sterowania bibliotekami pozostała niezmieniona. Pomimo niezbyt bogatej biblioteki układów obsługiwanych przez WinCUPL-a (dostępne są układy
EPLD/CPLD firmy Atmel oraz standardowe układy PLD rodziny 16v8, 20v8,
22v10), nadal cieszy się sporym powodzeniem wśród uŜytkowników, ze
względu na moŜliwości szybkiego i łatwego przygotowania projektów dla
układów PLD. Program cechuje nieskomplikowana składnia i łatwość opisu
przy jednocześnie dość duŜych moŜliwościach.
Rys. 4.10. Okno powitalne WinCUPL i WinSim.
Program ten umoŜliwia kompilację tekstowych plików źródłowych opisujących układy, realizowane w strukturze programowalnej, do formatu (jedec)
akceptowanego przez programatory oraz symulację działania zapisanej logiki
przy wykorzystaniu programu WinSim. Projekt układu opisuje się przy pomocy języka wysokiego poziomu, który nosi nazwę CUPL (został on opisany
w rozdziale 4.2). Przy jego pomocy moŜliwe jest tworzenie opisów cyfrowych układów kombinacyjnych i sekwencyjnych. WinCUPL udostępnia typowe dla opisów stosowanych w technice cyfrowej tablice prawdy, dowolne
funkcje logiczne, grafy przejść, a takŜe moŜliwości bliskie typowym makroasemblerom, tj. makropolecenia, predefiniowane funkcje oraz moŜliwość deklarowania stałych i zmiennych opisu.
115
Symulacja tworzonych projektów ogranicza się do symulacji funkcjonalnej, bez uwzględniania parametrów czasowych układów.
Ograniczoną funkcjonalnie do kompilatora i symulatora wersję oprogramowania narzędziowego udostępnia na swojej stronie internetowej firma Atmel w porozumieniu z firmą Logical Devices, która jest producentem tego
oprogramowania. (http://www.atmel.com.).
Pakiet WinCUPL zawiera następujące narzędzia:
WinCUPL - kompilator języka CUPL, zintegrowany z edytorem tekstowym. UmoŜliwia translację zbiorów zapisanych w języku
CUPL na zbiory zawierające rozkazy dla programatora.
WinSim
- symulator funkcjonalny projektów układów kompilowanych
przez WinCUPL. Rezultat symulacji moŜe być graficznie
modyfikowany.
Po zainstalowaniu programu dostępne są dwie ikony, słuŜące do uruchamiania:
- zintegrowanego edytora projektu WinCUPL,
- symulatora WinSim.
4.3.1. Obsługa WinCUPL
Aplikacja WinCUPL
Za pomocą aplikacji WinCUPL moŜna tworzyć nowe projekty, wprowadzać tekst źródłowy, poddawać go kompilacji oraz wywoływać symulator.
Plikami źródłowymi są: plik *.PLD dla kompilatora oraz plik *.SI dla symulatora.
116
Po uruchomieniu programu WinCUPL pojawia się główne okno. Widok
domyślnego okna głównego z otwartym przykładowym projektem przedstawia rysunek 4.11.
Rys. 4.11. Główne okno programu WinCUPL.
Okno główne składa się z paska menu i opcjonalnie z dodatkowego paska
narzędzi oraz trzech części charakterystycznych dla pakietu WinCUPL:
117
• Okna edytora tekstowego, w którym znajduje się plik źródłowy, automatycznie kolorującego słowa kluczowe i inne elementy tworzonego opisu
źródłowego, zgodnie z regułami języka.
• Okna komunikatów, w którym wyświetlane są raporty z działania poszczególnych plików będących efektem kompilacji, w tym komunikaty
o błędach.
• Okna zawartości projektu, przedstawiającego listę plików źródłowych wykorzystywanych w projekcie.
Na pasku tytułu, znajdującego się w jego górnej części okna głównego,
wyświetlana jest wersja WinCUPL-a udostępniana przez firmę Atmel Corporation. Pasek menu zawiera listę poleceń, przez wybranie których moŜemy
tworzyć, drukować i zapisywać (w postaci odpowiednich plików) wyniki wykonywanych czynności, jak np. kompilacji, symulacji. Pasek narzędzi zawiera
przyciski, z których korzysta się zamiast najczęściej uŜywanych poleceń menu (rysunek 4.12).
Rys. 4.12. Pasek menu i narzędzi programu WinCUPL.
Menu File
New
- utworzenie nowego projektu.
Open - otwarcie istniejącego projektu.
Close - zamknięcie aktywnego okna projektu.
Save
- zapisanie aktywnego projektu.
Save As
- zapisanie obecnie modyfikowanego projektu pod nową nazwą.
Save All - zapisanie wszystkich otwartych projektów.
Open Project - otwarcie istniejącego projektu.
118
Close Project - zamknięcie projektu.
Print Setup
Print
- wybór ustawień drukowania.
- druk aktywnego dokumentu.
MRU… - lista ostatnio otwartych projektów.
Exit
- wyjście z programu WinCUPL.
Menu Edit
Undo - cofnięcie ostatnio dokonanej zmiany.
Cut
- przeniesienie zaznaczonego tekstu do schowka.
Copy
- skopiowanie zaznaczonego tekstu do schowka.
Paste - wklejenie zawartości schowka w miejsce wskazane przez kursor.
Find
- wyszukanie tekstu w aktywnym dokumencie.
Find Next - wyszukanie następnego wystąpienia ostatnio poszukiwanej
frazy.
Replace - wyszukanie i zastąpienie tekstu w aktywnym projekcie.
Insert CUPL Macro Reference - wstawienie referencji makra CUPL do
aktywnego dokumentu.
Insert CUPL Macro Definition - wstawienie definicji makra CUPL do
aktywnego dokumentu.
Update Macro Symbol Table
- uaktualnienie tabeli symboli referencji
makr.
Insert Table - wstawienie Tabeli prawdy.
Menu View
Toolbar
- włączenie i wyłączenie paska narzędzi.
Status Bar - włączenie i wyłączenie paska stanu.
Project
- wyświetlenie lub ukrycie okna projektu.
Font
- zmiana czcionki zaznaczonego tekstu.
Refresh
- odświeŜenie aktywnego projektu.
119
Menu Options
Compiler - ustawienie opcji kompilatora.
Devices
- wybór docelowego układu programowalnego z listy układów.
Simulator - ustawienie opcji symulatora.
WinCUPL - ustawienie opcji środowiska WinCUPL.
Menu Run
Device Dependent Compile
- kompilacja zaleŜna od układu.
Device Independent Compile
- kompilacja niezaleŜna od układu.
Device Dependent Simulation
- symulacja zaleŜna od układu.
Device Independent Simulation - symulacja niezaleŜna od układu.
Menu Utilities
DOS
- wywołanie wiersza poleceń DOS.
WinSim
- uruchomienie programu WinSim.
CUPL Tools
- uruchomienie wszystkich narzędzi WinCUPL.
Menu Window
Cascade
- kaskadowe rozmieszczenie okien.
Tile Horizontal
- rozmieszczenie okien w poziomie.
Tile Vertical
- rozmieszczenie okien w pionie.
Arrange Icons
- rozmieszczenie ikon zamkniętych okien.
Auto Arrange
- automatyczne rozmieszczenie okien.
Menu Help
Contents - wyświetlenie tematów pomocy.
Search
- wyświetlenie okna wyszukiwania w pliku pomocy.
CUPL Programmers Reference Guide - otwarcie Podręcznika Programisty CUPL.
Simulator - otwarcie pliku pomocy symulatora WinSim.
Atmel Info - wyświetlenie listy dokumentów.
About
120
- wyświetlenie wersji aplikacji.
Pasek narzędzi
- utworzenie nowego projektu,
- otwarcie istniejącego projektu,
- zapisanie na dysk aktywnego projektu,
- wydruk aktywnego projektu na domyślnej drukarce,
- przeniesienie do schowka aktualnie zaznaczonego obiektu,
- skopiowanie do schowka aktualnie zaznaczonego obiektu,
- wklejenie zawartości schowka do aktywnego projektu,
- kompilacja zaleŜna od układu,
- kompilacja niezaleŜna od układu,
- symulacja zaleŜna od układu,
- symulacja niezaleŜna od układu,
- wywołanie wiersza poleceń DOS,
- uruchomienie programu WinSim,
- uruchomienie wszystkich narzędzi WinCUPL.
Aplikacja WinSim
WinSim jest środowiskiem umoŜliwiającym symulację funkcjonalną projektu opisanego w języku CUPL stworzonego w programie WinCUPL. Do jej
pracy niezbędne jest utworzenie pliku *.SI, w którym zapisuje się pobudzenia
testowe symulacji.
121
Jego struktura jest zbliŜona do struktury pliku opisującego logikę i zawiera
następujące elementy:
nagłówek,
blok deklaracji sygnałów wejściowych i wyjściowych do obserwacji po
słowie kluczowym ORDER,
blok wektorów testowych definiowany po słowie kluczowym
VECTORS.
Blok nagłówka powinien być identyczny z tym określonym w pliku źródłowym z rozszerzeniem *.PLD.
Blok deklaracji sygnałów wejściowych i wyjściowych określa kolejność
występowania w wektorach testowych poszczególnych zmiennych. Rozpoczyna go instrukcja ORDER.
Blok wektorów testowych umieszczony za słowem kluczowym VECTORS
powinien uwzględniać wszystkie zmienne wejściowe sprawdzanych funkcji
logicznych. Ilość wektorów testowych zaleŜna jest od ilości kombinacji sygnałów wejściowych, na które chcemy znać odpowiedź projektowanych
funkcji logicznych. Najczęściej uwzględnia się wszystkie moŜliwe kombinacje. Sygnały wejściowe muszą być wprowadzane do wektora testowego w kolejności ustalonej w bloku deklaracji sygnałów. W miejsce badanych sygnałów wyjściowych wstawia się znak *.
Po uruchomieniu aplikacji WinSim pojawia się główne okno. Widok domyślnego okna głównego przedstawia rysunek 4.13.
122
Rys. 4.13. Główne okno programu WinSim.
Pasek menu zawiera listę poleceń, przez wybranie których moŜemy tworzyć, drukować i zapisywać (w postaci odpowiednich plików) wyniki wykonywanych czynności, jak np. symulacji. Pasek narzędzi zawiera przyciski,
z których korzysta się zamiast najczęściej uŜywanych poleceń menu (rysunek
4.14).
Rys. 4.14. Pasek menu i narzędzi programu WinSim.
Menu File
New
- utworzenie nowego projektu.
Open - otwarcie istniejącego projektu.
Close - zamknięcie aktywnego okna.
Save
- zapisanie aktywnego projektu.
Save As
- zapisanie obecnie modyfikowanego projektu pod nową na-
zwą.
123
Save All - zapisanie wszystkich otwartych projektów.
Print Setup - wybór ustawień drukowania.
Print
- druk aktywnego dokumentu.
MRU… - lista ostatnio otwartych projektów.
Exit
- wyjście z programu WinSim.
Menu View
Status Bar - włączenie i wyłączenie paska stanu.
Source
- otwarcie okna tekstowe z aktywnym projektem z pliku *.SI.
Signal Definitions - otwarcie okna Signal Definitions dla aktywnej symulacji.
Grid
- włączenie siatki w polu wyświetlania sygnałów.
Grid Size - ustawienie rozmiarów siatki w polu wyświetlania sygnałów.
Colors
- zmiana kolorów wyświetlanych sygnałów na ekranie.
Wide Signals - przełączenie grubości linii wyświetlanego sygnału.
Refresh
- odświeŜenie aktywnego dokumentu.
Menu Signal
Add Signal
- dodaje nowe sygnały do symulacji.
Delete Signal
- usuwa zaznaczone sygnały z symulacji.
Rename Signal - zmienia nazwę wybranego sygnału.
Add Vector
- dodaje nowe wektory do symulacji.
Delete Vector
- usuwa wybrane wektory z symulacji.
Add Message
- dodaje wiersz wiadomości $MSG w pliku źródłowy
stanowiący komentarz opisujący np. wektor testowy.
Bus Members
- przełączenie na ekran szyny pamięci z wybranego sygnału.
Menu Simulator
Run Simulator
- uruchamia symulator CSIM dla aktywnego projektu.
Compile and Simulate
- kompiluje plik źródłowy *.PLD i uruchamia
symulator CSIM.
124
Assign Simulator Results
- przyporządkowuje sygnały z symulacji do
pliku symulującego.
Set Library
- wybór bibliotek symulatora.
Menu Window
Cascade
- kaskadowe rozmieszczenie okien.
Tile Horizontal
- rozmieszczenie okien w poziomie.
Tile Vertical
- rozmieszczenie okien w pionie.
Arrange Icons
- rozmieszczenie ikon zamkniętych okien.
Menu Help
Contents
- wyświetlenie tematów pomocy.
Search For Help On - wyświetlenie okna wyszukiwania w pliku pomocy.
About WinSim
- wyświetlenie wersji aplikacji.
Pasek narzędzi
- utworzenie nowego projektu,
- otwarcie istniejącego projektu,
- zapisanie na dysk aktywnego projektu,
- wydruk aktywnego projektu na domyślnej drukarce,
- dodanie nowego sygnału,
- usunięcie zaznaczonych sygnałów,
- dodanie wektorów testowych,
- usunięcie zaznaczonych wektorów testowych,
- uruchomienie symulatora,
- kompilacja projektu i uruchomienie symulatora,
- zwiększenie szerokości linii siatki,
125
- zmniejszenie szerokości linii siatki,
- zwiększenie wysokości linii siatki,
- zmniejszenie wysokości linii siatki,
- uruchomienie wszystkich narzędzi WinCUPL.
4.3.2. Praca z przykładowym projektem
W celu otwarcia, kompilacji oraz symulacji przykładowego projektu naleŜy wykonać następujące czynności:
1. Uruchomić WinCUPL z listy programów menu Start lub uŜywając ikony
słuŜącej do uruchomienia aplikacji projektu.
Po uruchomieniu programu WinCUPL pojawia się główne okno. Widok
domyślnego okna głównego przedstawia rysunek 4.15.
Rys. 4.15. Widok okna główne programu WinCUPL.
126
2.Otworzyć wybrany projekt umiejscowiony w:
C:\Wincupl2\Examples\Atmel\COUNT10.PLD (rysunek 4.16). Plik ten
przedstawia czterobitowy licznik dziesiętny liczący w górę i dół, z moŜliwością synchronicznego kasowania.
Rys. 4.16. Widok okna wyboru projektu.
3. Po dokonaniu wyboru projektu pojawia się główne okno programu podzielone na trzy okna (rysunek 4.17), w których dostępne są podstawowe informacje.
Okno zawartości projektu (PROJECT) przedstawia wszystkie pliki skojarzone z otwartym projektem lub drzewo z plikami. Dwukrotne kliknięcie na
nazwie danego pliku z tego drzewa powoduje otwarcie tego pliku w oknie
edytora. Zamknięcie okna projektu powoduje zamknięcie wszystkich okien
związanych z projektem.
Okno edytora tekstu (Editor) przedstawia pełny tekst tworzonego opisu
pliku źródłowego licznika.
127
Okno komunikatów (Messages) jest czyste. Po przeprowadzeniu procesu
kompilacji będzie przedstawiać raporty z działania plików i komunikaty
o błędach podczas kompilacji. Dzięki ich wskazaniu i skomentowaniu błędy
mogą być stosunkowo łatwo usunięte.
Wykaz wszystkich błędów generowanych podczas kompilacji i symulacji
znajdziesz w pliku pomocy CUPL Programmers Reference, rozdział 4 Error
Messages.
Rys. 4.17. Widok okien z projektem „Count 10”.
4. Wybór parametrów kompilacji.
Otworzyć okno Compiler Options poprzez wybranie z menu głównego
Options→Compiler. Okno przedstawia opcje bezpośrednio wpływające na
minimalizację, optymalizację i format plików wyjściowych (rysunek 4.18).
W zakładce Output Files w obszarze Downland powinien być zaznaczony
JEDEC, w obszarze Doc File Options, jeŜeli chcemy otrzymać dokument
z rysunkiem układu, zaznaczamy Fuse Plot i Equations.
128
RównieŜ ustawiamy parametry w pozostałych zakładkach, np.: General –
Simulate, JEDEC name = PLD name.
Zakładki Minimization oraz Optymization umoŜliwiają wybór sposobu
minimalizacji i optymalizacji, który będzie domyślny dla całego projektu.
Rys. 4.18. Widok okna konfiguracji kompilatora WinCUPL z aktywną zakładką Output Files.
Minimalizację uŜywa się do ustawienia stopnia minimalizacji dla poszczególnych zmiennych. MoŜna wybrać jeden ze sposobów: brak minimalizacji, szybka, Quinn-McCluskey, Presto, Expresso.
5. Wybór układu dla projektu.
Otworzyć okno Devices Selection (rysunek 4.19) poprzez wybranie z menu głównego Options→Devices. W oknie ukaŜą się pola zawierające listę
układów EPLD (Devices), nazwę firmy producenta Atmel (Manufacture), typ
obudowy układu scalonego (Package Type).
W dolnej części okna występuje pole edycyjne Device mnemonic oraz
przycisk wielokrotnego wyboru Device in file. Wybrać (zaznaczyć przycisk
wyboru) z pola Device in file oraz wybrać symbol układu (dla układów GAL:
g16v8 lub g22v10) w polu Device. Porównaj czy symbol układu w polu Devi-
129
ce Mnemonic jest taki sam jak w nagłówku pliku źródłowego w pozycji Device okna edytora tekstowego.
Rys. 4.19. Widok okna wyboru układu.
6. Kompilacja pliku źródłowego.
Z menu głównego wybierz Run → Device Dependent Compile (skrót F9
lub
). Jest to polecenie kompilacji projektu zapisanego w pliku źródłowym.
Pamiętaj, Ŝe jeŜeli plik źródłowy został zmodyfikowany, to przed kompilacją
naleŜy go zapisać.
Po zakończeniu kompilacji zostanie wyświetlony komunikat z przebiegu
kompilacji (rysunek 4.20).
Rys. 4.20. Widok okna przebiegu kompilacji.
130
7. Symulacja skompilowanego projektu.
Kiedy kompilacja przebiegnie bez błędów, wykonaj dwukrotne kliknięcie
na pliku z drzewa plików o nazwie Count10.SI. Otworzy się okno wywołania
symulatora “Open with Winsim” (rysunek 4.21).
Rys. 4.21. Okno wywołania symulatora WinSim.
Wybierz przycisk Tak. Spowoduje to otwarcie symulatora funkcyjnego
WinSim. Symulację pliku źródłowego moŜesz równieŜ wykonać wybierając
zakładkę Run → Device Dependent Simulate (skrót F7 lub
).
Uwaga! JeŜeli wybierzesz przycisk Nie z okna “Open with Winsim” (rysunek 4.21), to w oknie edytora tekstowego otwarty zostanie plik .SI.
W otwartym oknie symulatora WinSim przedstawiony jest proces symulacji (rysunek 4.22) omawianego projektu.
Rys. 4.22. Widok okna z wynikiem symulacji.
131
4.3.3. Pierwszy program
W celu utworzenia nowego projektu zapisanego w postaci pliku źródłowego naleŜy uruchomić opcję File/New/Project. Pojawi się okno kreatora nagłówka (rysunek 4.23), w którym naleŜy podać parametry identyfikacyjne
nagłówka pliku źródłowego (Desing Properties), ilość końcówek wejściowych (Input Pins) i wyjściowych (Output Pins) wykorzystywanych w projekcie oraz ilość węzłów wewnętrznych (Pinnodes). JeŜeli w projekcie wykorzystujemy konkretny układ PLD naleŜy wpisać go w pole Device nagłówka projektu. Lista układów, które moŜna zastosować, dostępna jest w bibliotece
CUPL po uruchomieniu opcji Option/Devices (patrz rozdział 4.3.2 - pkt 5).
Rys. 4.23. Okno kreatora nagłówka oraz deklaracji końcówek wyjściowych,
wejściowych i węzłów wewnętrznych.
Po określeniu parametrów identyfikacyjnych pliku źródłowego oraz parametrów projektu: liczby wyprowadzeń WEJŚĆ, liczby wyprowadzeń WYJŚĆ
oraz ilości węzłów wewnętrznych, zostanie utworzony pliku źródłowy z roz132
szerzeniem Bramki.PLD z pustym szablonem. Widok okna głównego z pustym szablonem przedstawia rysunek 4.24.
Rys. 4.24. Szablon pliku źródłowego z rozszerzeniem *.PLD.
W oknie edytora tekstowego, zachowując strukturę opisu pliku źródłowego, określamy: blok tytułowy, deklaracje wyprowadzeń z układu: wejść (Input pins) i wyjść (Output pins) - numery końcówek układu PLD, równania
logiczne lub inne opisy funkcjonalne projektowanych układów - patrz rozdział 4.2.4.
Podawane deklaracje wyprowadzeń w deklaracji PIN muszą być zgodne
z rodzajem wyprowadzenia (WEJŚĆ, WYJŚĆ, WEJŚĆ/WYJŚĆ) dla uŜytego
układu GAL16V8. Funkcje poszczególnych wyprowadzeń naleŜy odczytać
z jego schematu logicznego. Znajdziesz go w nocie katalogowej (Specifications GAL16V8 High Performance E2CMOS PLD Generic Array Logic™)
znajdującej się na stronie internetowej http://www.atmel.com/.
133
Widok okna edytora tekstu z pełnym tekstem pliku źródłowego przedstawia rysunek 4.25.
Rys. 4.25. Okno edytora tekstowego z plikiem źródłowym.
Opisana w pliku źródłowym struktura przedstawia osiem bramek logicznych. Schemat logiczny projektowanego układu przedstawia rysunek 4.26.
134
Pin 1 = a
a
b
Pin 2 = b
a
b
a
b
a
b
a
b
a
b
Pin 19 = xnor
Pin 18 = xor
Pin 17 = nor
Pin 16 = or
Pin 15 = nand
Pin 14 = and
Pin 13 = invb
b
Pin 12 = inva
a
Rys. 4.26. Struktura omawianego przykładu.
Gdy opisane zostaną wszystkie elementy pliku źródłowego, naleŜy wykonać kompilację pliku źródłowego Bramki.PLD. Istotną sprawą jest sprawdzenie parametrów kompilacji pliku źródłowego, które decydują o formacie pliku
wynikowego oraz ewentualnej symulacji działania zrealizowanej logiki. Parametry kompilacji dostępne są po uruchomieniu opcji Option/Compiller.
Wybór parametrów umoŜliwiający utworzenie pliku wynikowego w formacie
jedec, przeprowadzenie symulacji oraz generację dokumentu z rysunkiem
układu przedstawia rysunek 4.27.
Rys. 4.27. Widok okna wyboru parametrów kompilacji.
135
Ustawienie parametrów w zakładce General – opcje Simulate, JEDEC
name = PLD name oraz w zakładce Output Files w obszarze Downland opcji
JEDEC, zaś w obszarze General opcji Absolute, spowoduje, Ŝe w wyniku
kompilacji otrzymamy plik JEDEC z wektorami testowymi. JeŜeli w obszarze
Doc File Options zakładki Output Files zaznaczamy opcje Fuse Plot i Equations, to otrzymamy dokument z rysunkiem układu. Bardzo pomocnym jest
równieŜ zaznaczenie opcji List oraz Expanded Macro w obszarze General.
Otrzymamy wówczas pełne informacje o procesie kompilacji.
JeŜeli dokonaliśmy wyboru opcji kompilatora, moŜemy dokonać kompilacji poleceniem Run → Device Dependent Compile, skrót F9 lub przycisk
z paska narzędzi
. Ta funkcja skompiluje plik źródłowy, stworzy plik
Bramki.JED, wykona symulację i doda do programu wektory testowe. NaleŜy
pamiętać, Ŝe jeŜeli dokonaliśmy modyfikacji pliku, to naleŜy go zapisać przed
kompilacją.
Proces zakończenia kompilacji bez błędów jest potwierdzony komunikatem (rysunek 4. 28).
Rys. 4.28. Widok okna z komunikatem zakończenia kompilacji.
Gdy proces kompilacji przebiegnie bez błędów zostaną stworzone m.in.
następujące pliki (rysunek 4.29):
- JEDEC (Bramki.jed) - plik wejściowy dla urządzenia programującego,
- plik bezwzględny (Bramki.abs) - do uŜycia z CSIM,
- plik błędów (Bramki.lst) - lista błędów w pliku źródłowym,
136
- plik dokumentacji (Bramki.doc) - zawiera rozszerzone równania logiczne i tablice symboli zmiennych,
- plik PLA (Bramki.pla) - uŜywany przez filtry końcowe.
Rys. 4.29. Lista tworzonych plików.
Kolejnym etapem realizacji projektu jest jego symulacja. Uruchomienie
symulatora realizujemy poprzez polecenie Utilities → WinSim lub przyciskiem z paska narzędzi
.
Nie naleŜy uruchamiać symulatora bez uprzedniej kompilacji projektu.
Uwaga ta dotyczy takŜe wprowadzania poprawek do projektu: naleŜy pamiętać, aby po modyfikacji pliku Bramki.PLD lub Bramki.SI wykonać kompilację przed wywołaniem WinSim. Uruchomienie symulatora otworzy domyślne
okno główne aplikacji WinSim. Widok domyślnego okna głównego przedstawiony był na rysunku 4.13.
137
Po uruchomieniu symulatora rozpoczynamy od utworzenia pliku źródłowego z rozszerzeniem Bramki.SI. Widok okna głównego programu WinSim
z pustym szablonem pliku źródłowego przedstawia rysunek 4.30.
Rys. 4.30. Szablon pliku źródłowego z rozszerzeniem *.SI.
Polecenie File→New otwiera okno dialogowe kreatora nagłówka. Zamiast
wprowadzać ponownie takie same parametry nagłówka, jak dla pliku źródłowego Bramki.PLD, moŜna wybrać przycisk Desing File… i wskazać plik
Bramki.PLD o odpowiedniej nazwie. NaleŜy pamiętać, Ŝe dane w nagłówkach
obu plików muszą być identyczne. W przeciwnym wypadu jest wysyłany
komunikat ostrzegający o braku zgodności danych.
Po zatwierdzeniu danych pojawi się okno główne z otwartym oknem symulacji - rysunek 4.31.
138
Rys. 4.31. Otwarte okno symulacji.
Kolejnym krokiem jest dodanie śledzonych sygnałów oraz dodanie wektorów testowych. Śledzone sygnały – poszczególne zmienne - dodajemy poleceniem Signal→Add Signal lub przyciskiem z paska narzędzi
(rysunek
4.32). W pliku Bramki.SI zostanie dopisana instrukcja ORDER, która podaje,
jakie sygnały projektu mają uczestniczyć w symulacji.
Rys. 4.32. Okno definiowania sygnałów.
139
Instrukcja ORDER
Instrukcja ORDER podaje kolejność występowania w wektorach testowych poszczególnych zmiennych. Deklaracja kolejności ma postać:
ORDER: zm1, zm2, output;
W deklaracji kolejności powinno stosować się te same identyfikatory co
w specyfikacji układu. JeŜeli stosuje się skrócony zapis listowy, polaryzacja
pierwszej zmiennej indeksowej determinuje polaryzację reszty zmiennych
indeksowych.
Dla grupy sygnałów indeksowych moŜna uŜyć skrótowej notacji listowej.
W deklaracji kolejności moŜna wstawić stałe tekstowe, które oddzielają
zmienne między sobą. Stała tekstowa będzie się pojawiać w wydruku w kaŜdym wektorze. Stałe tekstowe naleŜy ująć w znaki cudzysłowu:
„stala tekstowa”
Formatując wydruk moŜna równieŜ zadeklarować wstawienie spacji za
pomocą operatora %, po którym naleŜy podać liczbę określającą liczbę spacji.
Przed deklaracją kolejności moŜna wstawić podstawę systemu liczbowego
(za pomocą słowa kluczowego BASE), który będzie się stosować do stałych
liczbowych ujętych w apostrofy.2
Przykłady deklaracji kolejności:
ORDER: clock, input, output;
ORDER: A0, A1, A2, A3, SELECT, !OUT0, !OUT1;
ORDER: A0..3, SELECT, !OUT0..1;
ORDER: clock, %2, input, %2, output;
Dla rozpatrywanego przykładu postać instrukcji ORDER przedstawia rysunek 4.33.
2
Łuba T., Markowski M. A., Zbierzchowski B. Kompilatory układów logicznych. Oficyna Wydawnicza PW.
Warszawa 1995.
140
Rys. 4.33. Otwarte okno z instrukcją ORDER.
Dodawanie wektorów testowych (rysunek 4.34) spowoduje dopisanie instrukcji VECTORS w pliku źródłowym Bramki.SI. KaŜdy wektor testowy
musi zawierać się w pojedynczej linii, bez znaku średnika. MoŜna to uczynić
poprzez wpisanie ich jako tekstu do pliku Bramki.SI po otwarciu go poleceniem View→Source lub skorzystać z interfejsu graficznego - polecenie Signal→Add Victor lub przycisk z paska narzędzi
.
Rys. 4.34. Okno definiowania wektorów.
Dodawanie wektorów testowych poprzez interfejs graficzny sprowadza się
do klikania myszą w odpowiedni punkt wykresu (tabela 4.10). NaleŜy pamiętać o zapisaniu zmian w pliku Bramki.SI.
141
Tabela 4.10. Wykorzystanie interfejsu graficznego do dodania wektorów testowych.
Sygnał/Wektor
1
2
Obszar Klawiatura
5
6
1
Nie
Wartość wejściowa HO (High)
2
Nie
Wejście zegarowe
(Low-High-Low)
3
Nie
Wartość testowa (wyjściowa) High
4
Nie
Wartość wysokiej impedancji (wejściowa i wyjściowa)
4
Alt
Ustawienie stanu początkowego
rejestr
4
Shift
Wyjście nietestowane
4
Ctr
Wartość nieokreślona
5
Nie
Wartość wejściowa LO (Low)
6
Nie
Wejście zegarowe
(High-Low-High)
7
Nie
Wartość testowa (wyjściowa) Low
3
4
7
Wynik
Instrukcja VECTORS
Instrukcja VECTORS rozpoczyna tę część pliku *.SI, w której podany zostaje ciąg wektorów z pobudzeniami testowymi. W wektorach określamy odpowiedni symbol dla kaŜdego sygnału z listy ORDER - wejściowego i wyjściowego. Symbole dla sygnałów WEJŚĆ określają ich pobudzenia podczas
symulacji, natomiast symbole dla sygnałów WYJŚĆ podają oczekiwane odpowiedzi.
Symbole dla sygnałów wejściowych (zadawane pobudzenia):
0 – zadaj stan niski (L)
- wartość wejściowa LO (Low).
1 – zadaj stan wysoki (H)
- wartość wejściowa HO (High).
C – zadaj impuls dodatni
- wejście zegarowe (Low-High-Low).
K – zadaj impuls ujemny
- wejście zegarowe (High-Low-High).
X – wartość nieokreślona.
P – ustawienie stanu początkowego rejestru.
142
‘ ‘ – wartość wejściowa, która będzie rozwinięta według zadanej podstawy liczbowej wyspecyfikowanej w deklaracji BASE, dozwolone znaki od 0 do F i X.
„ „ – wartość wyjściowa, która będzie rozwinięta według zadanej podstawy liczbowej wyspecyfikowanej w deklaracji BASE, dozwolone znaki od 0 do F, X oraz H, L, Z.
Symbole dla sygnałów wyjściowych (testy odpowiedzi):
L – testuj stan niski (L)
- wartość testowa (wyjściowa) Low.
H – testuj stan wysoki (H)
- wartość testowa (wyjściowa) High.
Z – testuj stan wysokiej impedancji - wartość wysokiej impedancji (wejściowa i wyjściowa).
N – nie testuj stanu
- wyjście nietestowane.
* – wyznacz w symulacji stan sygnału i wstaw go do wektora - wartość
wstawiana przez symulator (tylko dla wyjść).
Dla rozpatrywanego przykładu postać instrukcji VECTORS przedstawia
rysunek 4.35.
Rys. 4.35. Otwarte okno z instrukcją VECTORS.
143
Plik źródłowy Bramki.SI ma postać:
Name
PartNo
Date
Revision
Designer
Company
Assembly
Location
Device
Bramki;
KK0001;
20/04/06;
02;
Student;
KK;
None;
None;
g16v8a;
/***********************************************************/
/*
*/
/*
Przyklad kompilacji pojedynczych bramek
*/
/*
*/
/***********************************************************/
/*
* Order: definicja kolejnosci, polaryzacji i spacji
* podczas symulacjii i odpowiedzi na zadane wartosci
*/
ORDER: a, %2, b, %4, inva, %3, invb, %5, and, %8, nand, %7,
or, %8, nor, %7, xor, %8, xnor;
/*
* Vectors: definicja symulacji i odpowiedzi na zadane wartosci z naglowka i posrednich widomosci z listy symulacji.
*/
VECTORS:
$MSG
$MSG
$MSG
$MSG
"
"
" a
" -
b
-
00HHLHLHLH
01HLLHHLHL
10LHLHHLHL
11LLHLHLLH
1XLXXXHLXX
X1XLXXHLXX
0XHXLHXXXX
X0XHLHXXXX
XXXXXXXXXX
144
inverters and
!a !b
a & b
-- ------
symulacja pojedynczych bramek";
nand
or
nor
xor
!(a & b) a # b !(a # b) a $ b
-------- ----- -------- -----
xnor";
!(a $ b)";
--------";
Gdy plik Bramki.SI jest gotowy, naleŜy uruchomić symulator poleceniem
Simulator→Run Simulator lub przyciskiem z paska narzędzi
. Jeśli w pliku
źródłowym nie było błędów, w oknie symulatora zostaną wyświetlone wykresy z przebiegami czasowymi.
Wykresy z przebiegami czasowymi dla projektu Bramki przedstawia rysunek 4.36.
Rys. 4.36. Wynik symulacji projektu Bramki.
145
4.4. Programator LabTool-48XP
LabTool-48XP jest programatorem firmy Advantech Equipment cieszącym się duŜą popularnością na całym świecie ze względu na duŜą wydajność,
uniwersalność, prostotę obsługi i niezawodność. Lista obsługiwanych przez
niego układów zawiera ponad 5000 pozycji a producent zapowiada jej kwartalne rozszerzanie o ponad 100 nowych układów 3.
Rys. 4.37. Widok programatora LabTool48XP.
LabTool-48XP (rysunek 4.37) jest wysokiej jakości programatorem uniwersalnym współpracującym z komputerem PC przez port drukarki. Standardowo wyposaŜony jest w gniazdo 48-stykowe ZIF (Zero Insertion Force) do
programowania układów w obudowach typu DIL. KaŜda nóŜka gniazda programującego jest uniwersalna (moŜna na nią podać 4 róŜne napięcia, masę,
sygnał TTL, podciąg rezystorem PULL UP i PULL DOWN, szybkie sygnały
- zegar, dane, adresy, sygnały strobujące - pozostawić w wysokiej impedancji,
moŜna równieŜ czytać jej stan logiczny). Dla układów w obudowach innych
niŜ DIL (SO, SOIC, SSOP, TSOP, PSOP, PLCC, PQFP, BGA i innych)
o róŜnych rozstawach nóŜek oraz róŜnych szerokościach często z większą
3
http://www.elmark.com.pl
146
liczbą wyprowadzeń niŜ 48 firma Advantech skonstruowała wiele rodzajów
adapterów (rysunek 4.38). Ze względu na uniwersalność gniazda LabTool’a,
wszystkie adaptery są jedynie prostymi przejściówkami nie zawierającymi
elementów aktywnych. Zmniejsza to późniejsze ewentualne koszty rozbudowy stanowiska pracy. Opis adapterów (tablica połączeń) jest dostępny na
stronie producenta http://www.aec.com.tw. Do obsługi większości układów
pamięciowych wystarczy kilka rodzajów adapterów (44-pin PLCC, 48-pin
TSOP, 40-pin TSOP i 32-pin TSOP).
Rys. 4.38. Przykłady adapterów programatora LabTool48XP.
Podstawowe parametry programatora znajdują się w Instrukcji obsługi
Advantech Equipment Corporation.: LABTOOL-48XP. Intelligent Universal
Programmer. User′s Manual. Copyright Notice, którą znajdziesz na stronie
internetowej http://www.aec.com.tw/ firmy Advantech.
Programator (rysunek 4.37) posiada trzy diody LED informujące o stanie
pracy programatora.
Dioda zielona (GOOD) - ostatnia operacja programowania przebiegła
pomyślnie.
Dioda Ŝółta (BUSY) - programator jest zajęty (wykonywana jest operacja
na układzie zamontowanym w podstawce).
Uwaga! Nie wolno wkładać i wyjmować układu z podstawki, dopóki nie
zaświeci się dioda zielona lub czerwona. Wkładanie lub wyjmowanie układu
w czasie, gdy świeci się dioda Ŝółta, moŜe spowodować jego uszkodzenie.
147
Dioda czerwona (ERROR) - operacja programowania przebiegła nieprawidłowo.
Pulsowanie diody z częstotliwością 5Hz sygnalizuje, Ŝe układ scalony został zaprogramowany i zweryfikowany, oczekuje na wyjęcie i włoŜenie nowego układu. Opcja ta występuje w przypadku stosowania trybu programowania seryjnego „Mass Production Mode”, dzięki któremu moŜna przyśpieszyć programowanie większej liczby układów.
Programator obsługiwany jest przez program pod kontrolą systemu Windows LT48XP_660.EXE. Ze strony producenta (http://www.atmel.com) lub
dystrybutorów (http://www.elmark.com.pl; www.labtool.com) moŜna pobrać
(bezpłatnie) zawsze aktualną wersję oprogramowania obsługującego programator. Wszystkie polecenia programu są dostępne poprzez kliknięcie myszką,
wykorzystując widoczne na ekranie menu. Często jednak sekwencję kliknięć
moŜna zastąpić uŜyciem klawiatury, przyspieszając w ten sposób wykonanie
wielu czynności. Informacje na temat dostępnych klawiszy skrótu są dostępne
w menu po jego rozwinięciu.
Oprogramowanie programatora, oprócz standardowych funkcji, które posiada kaŜdy programator (Read, Program, Blank Check, Verify, Erase), posiada dodatkowe, które znacznie usprawniają pracę. NaleŜą do nich m.in.:
- Insertion Test - test poprawności włoŜenia układu do podstawki, jak
równieŜ połączenia kaŜdej nóŜki z odpowiadająca jej nóŜką podstawki. Sprowadza się to do sprawdzania kontaktu między programatorem a układem.
W czasie tego testu jest wykrywane kaŜde błędne włoŜenie układu do podstawki (adaptera), przesunięcie układu w podstawce, odwrotne włoŜenie
układu. Dzięki temu zapobiega się uszkodzeniom programatora i programowanego układu.
- Auto ID - automatyczne rozpoznawanie 8-bitowych pamięci Flash lub
EPROM. Większość producentów pamięci wyposaŜa swoje układy w funkcje
148
odczytu ID producenta (numer identyfikacyjny składający się z dwóch bajtów) i ID układu, starając się nie powtarzać numeracji zajętej juŜ przez innych
producentów. Programator po odczytaniu ID układu porównuje je ze swoją
bazą danych i pokazuje uŜytkownikowi do zatwierdzenia znaleziony układ.
Wcześniej jest wykonywany dodatkowo test kontaktu (ze względów bezpieczeństwa).
- Mass Production Mode - tryb programowania seryjnego, dzięki któremu
moŜna przyśpieszyć programowanie większej liczby układów. Funkcja moŜe
być zintegrowana z automatycznym numerowaniem (nadawanie numeru seryjnego programowanym układom). Obsługujący sam ustala, pod jakimi adresami pamięci oprogramowanie moŜe wstawić numer seryjny i o jaką wartość
ma być inkrementowany. Programator pracujący w tym trybie automatycznie
wykrywa obecność układu w gnieździe i jego wymianę po zaprogramowaniu.
Na tej podstawie przechodzi do obsługi kolejnego układu. MoŜna tu równieŜ
wyłączyć autonumerowanie i wszystkie układy będą programowane jednakową zawartością.
4.4.1. Praca z programatorem
Obsługa programatora LabTool-48XP/UXP nie wymaga Ŝadnych skomplikowanych czynności. Przed przystąpieniem do pracy naleŜy jedynie
sprawdzić czy podłączenie programatora do komputera zrealizowane jest
w sposób prawidłowy. Oprogramowanie sterujące automatycznie wykrywa
podłączenie programatora do portu. Stosowny komunikat wyświetlany jest
w polu tekstowym okna głównego programu.
Po uruchomieniu programu LabTool-48XP/UXP
LabTool-48XP.lnk
pojawia
się główne okno programu sterującego pracą programatora. Widok domyślnego okna głównego programu przedstawia rysunek 4.39. W oknie przedstawione są komunikaty ukazujące gotowość programatora do pracy wraz z datą
149
uŜytkowania, numer portu równoległego/drukarkowego (LPT1) i wersja
sprzętu (Firmware Version 3.10).
Rys. 4.39. Okno główne programu sterującego pracą programatora.
Na pasku tytułu wyświetlana jest nazwa programatora. Pasek menu zawiera listę poleceń umoŜliwiająca zaprogramowanie, wykonanie weryfikacji
i zabezpieczenie układu. Pasek narzędzi zawiera przyciski, z których korzystamy zamiast najczęściej uŜywanych poleceń menu (rysunek 4.40).
Rys. 4.40. Pasek menu i pasek narzędzi programu LabTool-48XP.
Polecenia menu głównego mogą być wybierane przy uŜyciu myszki lub
klawisza ALT i wciśnięciu podkreślonej litery nazwy rozkazu (np. ALT-F dla
150
polecenia “File”). Po rozwinięciu menu poszczególne rozkazy wymagają tylko naciśnięcia klawisza odpowiadającego podkreślonej na ekranie literce.
Menu File (ALT-F)
Save Buffer (ALT-S) - zapis zawartości bufora do pliku na dysku.
Load File (ALT-L) - odczyt danych z pliku i wpisanie ich do bufora.
Exit (ALT-X)
- wyjście z programu LabTool-48XP.
Menu Project (ALT-J)
Save Project (ALT-F1) - zapisuje aktualne ustawienia oprogramowania
LabTool’a do wskazanego pliku projektu.
Load Project (ALT-F2) - przywraca ustawienia oprogramowania do takich, jak poprzednio uŜywane i zapisane do
wskazanego pliku projektu.
Menu Device (ALT-D)
Change (ALT-C) - wybór układu do programowania.
Auto Select EPROM (ALT-A) - automatyczne wyszukanie pamięci typu
EPROM lub FLASH.
Mass Production Mode - tryb seryjnego programowania.
Edit (ALT-E) - edycja bufora.
Modify Vectors - modyfikacja wektora testującego (dostępna tylko przy
wyborze układu PLD).
Read (ALT-R) - odczytanie zawartość układu i wpisanie jej do bufora.
Blank Check (ALT-B) - sprawdzanie czystości układu scalonego.
Program/Auto (ALT-P)
- programowanie układu z aktualną zawartością bufora.
Verify (ALT-V) - weryfikacja poprawności zapisu bufora z zawartością
układu scalonego.
Erase (Ctrl-F1) - kasowanie zawartości układu znajdującego się
w podstawce.
151
Secure (ALT-U) - zabezpieczenie układu.
Compare (Ctrl-F3) - porównanie zawartości układu z zawartością bufora.
Configuration (ALT-G) - ustawienia konfiguracyjne rejestrów.
Menu Options (ALT-O)
Modify Programming Parameter (F3)
- modyfikacja parametrów programowania układu.
Device Operation Options (F4)
- ustawienia opcji operacji dla programowanego układu.
Paralel Port Selection (F5) - wybór portu równoległego.
Statistics (F6) - wybór funkcji statystycznych.
Menu Diagnostic
Self Test (F7) - włączenie testów programatora.
Menu Help (ALT-H)
Help Topic (F1) - wyświetlenie tematów pomocy.
About
- wyświetlenie informacji o aplikacji.
Pasek narzędzi
- zapisuje aktualne ustawienia oprogramowania LabTool’a do
wskazanego pliku projektu,
- przywraca ustawienia oprogramowania do takich, jakie były
poprzednio uŜywane i zapisane do wskazanego pliku projektu,
- wybór układu do programowania,
- automatyczne wyszukanie i wybór pamięci EPROM lub
FLASH,
- edycja bufora,
- modyfikacja wektora testującego,
- odczyt zawartości układu i zapisanie jej do bufora,
- sprawdzanie czystości układu scalonego,
152
- programowanie układu aktualną zawartością bufora,
- weryfikacja poprawności zapisu bufora z zawartością układu
scalonego,
- kasowanie zawartości układu znajdującego się w podstawce,
- porównanie zawartości układu z zawartością bufora,
- zabezpieczenie zawartości układu,
- ustawienia konfiguracyjne rejestrów,
- ustawienia opcji operacji dla programowanego układu.
4.4.2. Programowanie układu
W celu zaprogramowania układu naleŜy wykonać następujące czynności:
1. Wybrać układ programowany.
UŜyj polecenia z menu Device→Change lub klawiszy skrótu „ALT-C”
(ikona Select
na pasku narzędzi). Wpisz pełną nazwę układu scalonego,
który chcesz programować. Operację ta moŜna wykonać uŜywając myszki,
dokonując wyboru układu z listy (rysunek 4.41).
Rys. 4.41. Okno Change Device wyboru układu.
153
2. Załaduj plik projektu do zapisania w układzie.
UŜyj polecenia z menu File→Load File lub klawiszy skrótu „ALT-L”
(ikona Load
na pasku narzędzi). Wybierz plik do załadowania z rozsze-
rzeniem JEDEC (rysunek 4.42). Plik typu JEDEC zawiera spis połączeń
w macierzy elementów, reprezentowany przez adres oraz serię znaków „1”
bądź „0” odpowiednio sygnalizujących obecność połączenia lub jego brak.
Zawiera równieŜ wektory testowe (lista pinów oraz wartości kaŜdego z nich
dla kaŜdego kroku testowego) umoŜliwiające przeprowadzenie przez programator testów funkcjonalności projektu.
Rys. 4.42. Okno główne z załadowanym projektem (format jedec).
Opcjonalnie, moŜna załadować bufor zawartością danych odczytanych
z innego zaprogramowanego układu. Operację odczytu zawartości układu
dokonujemy poleceniem z menu Device→Read lub przy uŜyciu klawiszy
skrótu „ALT-R” (ikona Read
154
na pasku narzędzi).
3. WłóŜ do podstawki ZIF czysty (blank) układ przeznaczony do zaprogramowania. UŜyj polecenia z menu Options→Operation lub klawiszy skrótu „F4” (ikona Option
na pasku narzędzi). Następnie wybierz opcje ope-
racji dla programowanego układu (rysunek 4.43).
Po wykonaniu tej czynności, włączamy programowanie uŜywając klawiszy skrótu „ALT-P” lub ikona Prog.
na pasku narzędzi.
Rys. 4.43. Okno ustawienia opcji dla programowanego układu.
4. W przypadku programowania większej liczby układów naleŜy zmienić
tryb programowania na tryb programowania seryjnego Mass production mode, dzięki któremu moŜna przyśpieszyć programowanie. UŜyj polecenia
z menu Device→ Mass production mode (rysunek 4.44). Po wejściu w ten
tryb programowania, wszystkie funkcje (skróty) klawiatury i funkcje myszy
są nieaktywne. Po włączeniu tej opcji LabTool-48XP/UXP biedzie automatycznie programować układ po poprawnym umieszczeniu w podstawce ZIF.
155
Zaprogramowanie układu jest sygnalizowane mruganiem zielonej diody LED.
Wtedy naleŜy wyjąć z podstawki zaprogramowany układ i włoŜyć do podstawki nowy. Po włoŜeniu do podstawki nowego układu, programator najpierw sprawdza poprawność kontaktów, ID i następnie przechodzi do programowania. Dzięki zablokowaniu funkcji klawiatury i myszy, nie istnieje
ryzyko nieoczekiwanej zmiany zawartości bufora.
Pamiętaj, Ŝe nie wolno wyjmować lub wkładać układu do podstawki, dopóki nie zaświeci się dioda zielona lub czerwona, zgaśnie Ŝółta.
Rys. 4.44. Okno trybu programowania seryjnego.
5. Jeśli układ posiada konfigurowalne opcje oscylatora, watchdoga, zabezpieczenia, itp. MoŜesz włączyć konfigurowanie tych ustawień skrótem
„ALT-G” (ikona Config
).
Opcje te są dostępne tylko wtedy, gdy układ ma takie moŜliwości.
Programowanie konfiguracji lub zabezpieczenia układu moŜe być takŜe
wykonywane po wciśnięciu ikony Proct
lub wraz z operacją programo-
wania układu Programm. Konfigurację i zabezpieczenie układu w operacji
programowania osiągamy uŜywając polecenia z menu Options→Secure lub
156
klawiszy skrótu „ALT-U”. NaleŜy zaznaczyć okno wielokrotnego wyboru
„Secure aft. Prog”. Zapisanie zabezpieczenia odczytu w układach posiadających tą funkcję spowoduje brak moŜliwości weryfikacji poprawności programowania układu oraz odczytu zawartości układu przez programator.
157
4.5. Literatura do rozdziału 4
1. Advantech Equipment Corp.: LABTOOL-48XP. Intelligent Universal Programmer. User’s Manual. Printed in Taiwan. July 2002.
2. Atmel: WinCUPL. User’s Manual. Copyright Atmel Corporation 1997.
3. Atmel: ABEL/CUPL. Design File Conversion. Aplication Note. Atmel
Corporation 2002.
4. Atmel: WinCUPL.Tutorial 1.
5. CUPL Programmers Reference Guide. Atmel Corporation. Library, ETC.
6. Łuba T., Markowski M. A., Zbierzchowski B. Kompilatory układów logicznych. Oficyna Wydawnicza PW. Warszawa 1995.
7. Pasierbiński J., Zbysiński P.: Układy programowalne w praktyce. WKŁ.
Warszawa 2001.
8. Zbysiński P., Pasierbiński J.: Układy programowalne - pierwsze kroki.
Wyd. II. BTC. Warszawa 2004.
158
159