WYDZIAŁ ELEKTRONIKI MIKROSYSTEMÓW I FOTONIKI
WPROWADZENIE
DO
ELEKTRONIKI I TELEKOMUNIKACJI
CZĘŚĆ I
prof. Andrzej Hałas
Katedra Mikroelektroniki i Mikrosystemów
SIŁY SŁABYCH ODDZIAŁYWAŃ
Prawo powszechnego ciążenia – I. Newton 1687 r.
M
m
Stała grawitacyjna
M.m
FG 2
R
N.m 2
G 6,67.10 2
R
kg
Oddziaływanie między ładunkami elektrycznymi – Ch. Coulomb 1785 r.
Q
q
R
Q.q
F k 2
R
11
k
N
R
1 m1.m2
F
μ R2
ε εo.εr
Przenikalność elektryczna próżni
Oddziaływanie między masami magnetycznymi
S
S
1
4πε
12
εo 8,85.10
μ μo.μr
C
V.m
Przenikalność magnetyczna próżni
V.s
μo 4π.107
A.m
CENTRALNE POLE SIŁ - NATĘŻENIE POLA
m
M
+
Linie sił pola
R
Q
q
+
+
+
R
_
-
+
Natężenie pola grawitacyjnego
K graw
F
M
G 2 g
m
R
Natężenie pola elektrycznego
F
Q
K el k 2
q
R
LINIE NATĘŻENIA POLA MIĘDZY ŁADUNKAMI
ELEKTRYCZNYMI
Przyciąganie
Odpychanie
pel q.l
l
Dipol elektryczny
V
m definiuje
Natężenie pola elektrycznego K
się jako stosunek
siły F, działającej na dodatni ładunek q, do wartości tego ładunku.
Linie natężenia pola linie styczne w każdym swoim punkcie do wektora
działającej siły F i tym samym do wektora natężenia pola K.
W polu elektrycznym linie zaczynają się na ładunkach dodatnich, a kończą
na ładunkach ujemnych.
ENERGIA POTENCJALNA W CENTRALNYM
POLU SIŁ
Energię potencjalną ciała definiuje się jako pracę potrzebną do
F
przeniesienia tego ciała z danego punktu pola sił do nieskończoności.
F
h
R
RZ
+
+
_
Ep
Rz h
F.dR G
+
R
R
Ep F.dR k
M.m
m.g R z h
Rz h
(Ep)h (Ep)Rz h (Ep)Rz m.g.(Rz h) m.g.Rz m.g.h
Q.q
Q.q
dR
k
2
R
R
Jeżeli pracę wykonuje pole
Ep jest dodatnia
Jeżeli praca wykonywana
jest przeciw siłom pola -
Ep jest ujemna
POTENCJAŁ W POLU SIŁ
+
Q
_
Potencjał jest parametrem charakteryzującym
pole sił i nie zależy od właściwości obiektu, na
który działa siła.
q
R
W polu grawitacyjnym Ziemi na wysokości h od jej
powierzchni
V R h
Ep
z
•
•
m
G
M
g Rz h
Rz h
W polu elektrycznym, w odległości R od
_ ładunku wytwarzającego pole
+
Linie ekwipotencjalne
R z h
Linie linie natężenia
pola
VR
E
p R
q
Q
k
R
PRACA PRZESUNIĘCIA W POLU
ELEKTRYCZNYM O STAŁYM NATĘŻENIU
A
B
+
d
_
+
E
WAB Ep
p A
B
FAB=q.KAB
W polu elektrycznym
więc :
FAB .d
E E
p B
p A
q
q
K AB .d
VB VA UBA K AB .d
K A B
VB VA UBA
d
d
PRAWO GAUSSA
A
Strumień elektryczny liczba linii natężenia
pola elektrycznego przechodzących przez prostopadle
ustawioną powierzchnię A.
Umownie przyjęto, że
Ψ K.A V.m
W przypadku kuli o
promieniu R :
1 Q
Q
2
4
.R
4. R 2
Prawo Gaussa - strumień linii natężenia pola
przez dowolną powierzchnię zamkniętą = sumie ładunków w
obszarze ograniczonym tą powierzchnią podzielonej przez
przenikalność elektryczną ośrodka, otaczającego ładunki.
Stąd: natężenie pola elektrycznego
Q
- powierzchniowa gęstość ładunku
A
q
K
A .A
V
m
POJEMNOŚĆ ELEKTRYCZNA
Ładunek zgromadzony na powierzchni kuli jest wprost
proporcjonalny do wartości przyłożonego napięcia.
V=0
QU
R
Współczynnik proporcjonalności
Q
C
U
C A.s s
V V F
Potencjał na powierzchni kuli
U
V k
Q
R
Ponieważ U=V-V=V, zatem pojemność kuli
C
Q R
4R
U k
KONDENSATOR PŁASKI
d
Zgodnie z prawem Gaussa natężenie pola elektrycznego
K
+
U
_
Q
.A
A – wewnętrzna powierzchnia
jednej z okładek kondensatora
Z definicji natężenie pola elektrycznego
Stąd pojemność kondensatora płaskiego
C
W próżni =0 i stąd
A
C0 ε 0
d
F
ε 0 8,85.1012
m
Q
A
U
d
C C0
ε
ε0
K
U
d
DIELEKTRYKI
Dielektryki – ciała b. słabo przewodzące prąd elektryczny - izolatory
Cząsteczka niepolarna
Cząsteczka polarna
-
-
O
H
+
K=0
pel=0
Ciało stałe z cząsteczek
polarnych
+
+
l
H
K
K=0
l
Moment dipolowy pel=q.l
pel
qind .l Qind .d
Polaryzacja P
ind
V
A.d
A.d
Elektrety – trwała polaryzacja po zestaleniu w obecności pola
Ferroelektryki – porządkowanie domen w pewnych temperaturach
-
+
+
+
+
+
-+ d
+
K
INDUKCJA ELEKTRYCZNA
σo
l
l
l
+
+
+
+
+
l l l l l l l l l l
l
-
+
dielektryk
+ ++ + +
l
+++++++++
l l l l l l l l l l
+++++++++
+
σo P K
Ko
-
- gęstość ładunku na
okładce kondensatora
P - polaryzacja = gęstość
ładunku wyindukowanego
na ściankach dielektryka
σo
P ind r 1 .0 .K
K o- natężenie pola elektrycz.
w próżni
Nieskompensowany ładunek na okładce
kondensatora
0
Indukcja elektryczna
0 ind
oK oK o P
0 K 0 0 K P 0 K r 0 K 0 K K
D εoK o εK
C
m 2
K
- natężenie pola elektrycz.
w dielektryku
Podatność elektryczna
e r 1
POŁĄCZENIA KONDENSATORÓW
Połączenie równoległe
U
C1
C2
Q Q1 Q2 Q3 C1U C2 U C3 U C1 C2 C3 U
C3
C
C1
U
C2
C3
Q
C1 C2 C 3
U
Połączenie szeregowe
1
Q Q Q
1
1
U U1 U 2 U 3
Q
C1 C2 C3
C
C
C
2
3
1
1 U 1
1
1
C Q C1 C2 C3
PRĘDKOŚĆ NAŁADOWANYCH CZĄSTEK W
PRÓŻNI
Praca niezbędna do przeniesienia ładunku q
z katody do anody
anoda
katoda
q
Wk a Epa Epk qVa qVk qU
U
+
_
W przypadku elektronu
q=e=1,601.10-19 C
m=me=9,107.10-31 kg
v 5,93.105 U
m
s
Jeżeli pracę wykonuje pole naładowana cząstka
uzyskuje energię kinetyczną = różnicy energii
potencjalnych na anodzie i katodzie
1
mv 2 qU
2
i stąd prędkość naładowanej cząstki :
q
v 2 U
m
ODCHYLANIE W POLU ELEKTRYCZNYM
OCYLOSKOP KATODOWY
h 2 h1 v y
tgθ
L
vx
y
Ua
+Ud
h2
h2
vx
l
vx
t
x
d
h1
ekran
l
vx
L h1
v y a yt
1
h1 a yt2
2
L 1 2 1 l2 L
h2 a yt a yt a y 2 2 1
l 2
2 vx l
2
L
W polu elektrycznym:
vy
Ua
q
e
ay K
K
m
m e
Stąd, czułość odchylania:
U
K d
d
h2 1 l 2L l
Ud 4 d Ua
vx 2
e
Ua
m e
LAMPA OSCYLOSKOPOWA
fp = fs
Tp=Ts
fp= 2fs
Us
t
Tp=0,5Ts
sygnał
ø
Up
t
X-X
U0
ø
podstawa czasu
+
_
fp=0,5fs
Y-Y
?
X–X
Y-Y
Ekran
Tp=2Ts
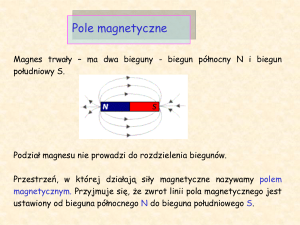
POLE MAGNETYCZNE
William Gilbert - 1600 r.
Hans Christian Oersted - 1820 r.
N
S
N
S
Kciuk prawej ręki, ułożonej w kierunku
przepływu prądu, wskazuje płożenie bieguna N.
II
LINIE POLA MAGNETYCZNEGO
I
N
Linie pola magnetycznego są
zawsze zamknięte.
Ramiona pętli przez którą przepływa
prąd wzajemnie się odpychają.
Jeżeli przez dwa przewody prąd
przepływa w tym samym kierunku
to przewody te przyciągają się.
Opiłki żelaza układają się wzdłuż
linii pola magnetycznego.
S
I
STRUMIEŃ ŁADUNKÓW W POLU
MAGNETYCZNYM
Odpychanie - zgodny kierunek
Przyciąganie - przeciwny kierunek
linii
N
N
linii
N
I
S
N
F ~ I.l .sin
F
F
B
F B.I.l .sin
+
I
Po podstawieniu
v
N
S
q
oraz
t
F q.v.B.sinα lub
l
I
-
S
B – indukcja magnetyczna T
N V.s
2
A.m
m
l v.t
F q vB
Wzór Lorenza
ZASADA SPEKTROMETRU MASOWEGO
Jeżeli B v - to naładowane cząstki poruszają się po torach kołowych.
Podczas ruchu po torze kołowym
Fod Fmag
y
v
B
Stąd:
r
F
+
x
F
v
m.v2
q.v.B
r
m.v
i promień toru: r
q.B
Prędkość naładowanych cząstek:
z
i ostatecznie
1
m
r
2 U
B
q
v 2
q
U
m
SPEKTROMETR MAS
y
Us
m1 m2 m3
ø
Up
t
X-X
x
U0
B
z
R
Us
ø
podstawa czasu
+
_
Y-Y
1
m
r
2 U
B
q
Jeżeli napięcie przyspieszające jony w wyrzutni
ma ten sam kształt i tą samą fazę, to na ekranie
lampy oscyloskopowej pojawi się całe widmo
analizowanych gazów.
ODCHYLANIE ELEKTRONÓW W JEDNORODNYM
POLU MAGNETYCZNYM
y
F
r r h1 l
v
h2
m
elektrony
hr r l
2
L.l
r l
2
h1
1
m
2 U
B
q
x
2
r
r2 l L + l
r l
2
h=B
2
2
l
L.l
h2 L.tgm L
2
2
r h1
r l
h h1 h2
a jeżeli
2
Po podstawieniu
r
2
L
l
2
h1 r r l
h
2
2
ekran
l L + l
2U
l
2
<<
r2
to
h
l L l
r
q
5 l L l
2, 96.10
B
m
U
MOMENT MAGNETYCZNY
F2
I
I
F1
B
X
X
aX
X
X
BX
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
bX
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
DX
X
AX
X
X
X
X
X
CX
I
F1 F3
Siły:
działają wzdłuż jednej linii i
wzajemnie się równoważą
F2
B
AB
b
sin
2
B
F3
I
B
Proste działania sił:
F2 F4 I.a.B
CD
nie pokrywają się.
B
F4
F
4
msił F2
Moment tych sił:
b
b
sin F4 sin I.a.b.B.sin
2
2
Magnetyczny moment dipolowy ramki
mdip I.a.b I.A
POLE MAGNETYCZNE PĘTLI I SOLENOIDU
Pętla o promieniu r
Solenoid o N zwojach na długości
mdip
N
S
N
w środku pętli
Indukcja magnetyczna:
Dipolowy moment
magnetyczny
Natężenie pola
magnetycznego
l
N
n
l
wewnątrz solenoidu
I
B μo
2r
mdip π.r 2 .I
A
m
S
B μ o .I.n
mdip π.r 2 .I.N
Przenikalność
magnetyczna próżni
V.s
0=4.10-7 A.m
MAGNETON BOHRA
q
e
I= =
v
t 2πr
2
mdip = πr .I
r
Z warunku równowagi sił Fod=Fel wynika zależność:
m e .v 2
1 e2
r
4π 0 r 2
mdip
i stąd
e
v
2 π.εo .r.m e
W modelu Bohra, dipol magnetyczny wytwarzany jest przez elektron wirujący
wokół jądra atomu wodoru. Orbitalny moment magnetyczny tego dipola:
2
m dip
e
4
r
π.εo .m e
r =5,3.10-11 [m]
me=9,1.10-31[kg]
e =1,6.10-19 [A.s]
o =8,85.10-12[F/m]
mdip=9,27.10-24 [A.m2]
msp mdip ss 1
Moment dipolowy i spinowy są momentami elementarnych dipoli magnetycznych
MAGNETYCZNE WŁAŚCIWOŚCI CIAŁ
Polaryzacja magnetyczna
albo magnetyzacja ciała
DIAMAGNETYKI
H2, He, H2O, Cu, Zn,
Hg, szkło, grafit
1>r 1
Pmag
mdip
V
Oddziaływania dipoli wewnątrz cząsteczki diamagnetyka
wzajemnie się kompensują (Pmag=0). Pod wpływem H powłoki
elektronowe ulegają pewnej deformacji i pojawia się niewielkie pole
Pmag skierowane przeciwnie do pola zewnętrznego.
PmagH
PARAMAGNETYKI Cząsteczki paramagnetyka są dipolami magnetycznymi, ale w
N2, O2, Al, K, Ti, W, Pt
1 r 1
wyniku ruchów termicznych ich oddziaływania wzajemnie się
kompensują. Pod wpływem H następuje porządkowanie dipoli,
a pole Pmag wzmacnia pole zewnętrzne.
PmagH
FERROMAGNETYKI Dipole o dużych momentach magnetycznych mają tendencję do
Fe, Co, Ni, Gd, Dy
1 r=f(H)
samoporządkowania się w pewnych obszarach, zwanych
domenami. Pole H porządkuje te domeny, a pole Pmag
wzmacnia pole H.
Pmag= f(H)
PRAWO GAUSSA
A
Linia indukcji magnetycznej – linia w każdym swym punkcie styczna do
kierunku wektora indukcji B.
Strumień indukcji magnetycznej – liczba linii indukcji magnetycznej
przechodzących przez prostopadle
2
Φ B.A Wb T.m V.s ustawioną powierzchnię A.
Prawo Gaussa – strumień indukcji magnetycznej przez dowolną powierzchnię
zamkniętą jest równy zeru.
ZJAWISKO INDUKCJI ELEKTROMAGNETYCZNEJ
G
G
I2
I
S
I1
N
Reguła Lenza:
Prawo Faradaya
N
Kierunek prądu indukowanego musi być zawsze taki,
aby wytworzone przez ten prąd pole przeciwdziałało
zmianom, które spowodowały jego wytworzenie.
Eind
dΦ
N
dt
N – liczba zwojów cewki
MECHANIZM INDUKCJI
ELEKTROMAGNETYCZNEJ
V
B
-
+
-
+
v
v
F
F
-
Reguła trzech
palców prawej
ręki
v
F
+
-
+
F = e.v.B.sin(v,B)
INDUKCJA WZAJEMNA
Całkowity strumień indukcji magnetycznej w
uzwojeniu cewki 2:
21N2 I1
G
cewka 1
S
I1
I2
N
cewka 2
V.s
1
H
.
s
A
L21=L12 - współczynnik indukcji wzajemnej,
wyrażony w henrach
N221=L21I1
Siła elektromotoryczna, indukowana w cewce 2
R
dΦ21
dI1
Eind N 2
L21
2
dt
dt
Prąd indukowany w cewce 2 oddziaływuje
zwrotnie na obwód cewki 1, indukując w
Prąd I1 płynący w obwodzie
nim siłę elektromotoryczną, skierowaną
cewki 1
przeciwnie do Eo
dI 2
dI 2
E0 L12
Eind L12
dt
1
dt
I1
R
Eo
INDUKCJA WŁASNA - SAMOINDUKCJA
Każda zmiana prądu w obwodzie powoduje
zmianę strumienia indukcji magnetycznej i w
konsekwencji wytworzenie SEM indukcji własnej o
kierunku zgodnym z regułą Lenza.
I
I
UZ
+E
0
W
L – indukcyjność własna
obwodu [H=.s]
Równanie napięć w obwodzie
UZ
R
I
Eind
Eind
dI
L
dt
tt
Prąd po zamknięciu włącznika
Prąd po otwarciu włącznika
Eind
tt
L
- stała czasowa obwodu
R
dI
U Z L R.I
dt
R
t
UZ
I
1 e L
R
U Z RL t
I
e
R
ZASADA DZIAŁANIA TRANSFORMATORA
Na wspólnym rdzeniu
SEM samoindukcji w uzwojeniu pierwotnym
21 1
dΦ
E
N
U1
uzwojenie
uzwojenie
ind1
1
dt
pierwotne
wtórne
U1
U2
SEM indukowana w uzwojeniu wtórnym
dΦ
U2
2
dt
U2 N2
Przekładnia napięciowa
U1 N1
Eind N 2
Zaniedbując straty, można przyjąć, że P = U1.I1 = U2.I2
Stąd przekładnia prądowa
I 2 N1
I1 N 2
PRZEPŁYW PRĄDU ZMIENNEGO PRZEZ
REZYSTOR, CEWKĘ I KONDENSATOR
i Im sin t
u i.R° Im R sin t Ui msin
t t
I
sin
R
°
Um
R
Im
Um
R
di
d
u L L.I m sin t ImL.I m cos t
i
°
°
L
°
m
i
i
°
dt
dt
u L.I m sin t i U
mI msin
sin t
2
2
Um
L
Im
dQ
du
C
dt
dt
I
I
1
u i.dt m sin t.dt m cos t
C
C
C
Um
1
I
°
u m sin t
I m C C
C
2
i
PRZESUNIĘCIE FAZOWE
y
u
y
0
0
u = Umsin t
t
π
2
u u
y = R sin(+o)
α 2π
u = Umsin(t+ )
t
Um
t
2π.f.t = t
T
y = R sin(t+o)
t
Um
u
u
π
2
u = Umsin(t - )
Um
t
DRGANIA WYMUSZONE
R
UL
C
Um
UL-UC
L
Im
UR
Um
Im
i=Imsin(t-)
UR
U 2m U 2R U L UC
UC
u = Umsint
Im
2
2
I
1
U m I R I mωL m I m R 2 ωL
ωC
ωC
2
m
1
Z R ωL
ωC
2
2
2
2
tgα
UL UC
UR
ωL
R
1
ωC
L
C
DRGANIA NIE TŁUMIONE
1.
2.
+
-
3.
I
4.
5.
+
I
t=0
1.
2.
3.
t=0
1
t= T
4
4.
1
t= T
2
1
t= T
2
3
t= T
4
t=T
1,5
3
t= T
4
i I msinω0t
11
0,5
0
30
60
90 120 150 180 210 240 270 300 330 360
-0,5
+
-
6.
1
t= T
4
0
6.
5.
t=T
u Umcosω0t
-1
-1,5
0
1
T
4
1
T
2
3
T
4
T
0 2.f0
1
L.C
DRGANIA TŁUMIONE
I
I0
1
0,8
R
I I 0e
0,6
.t
sin t t
0,4
+
L
-
0,2
C
0
0
45
90
135
180
225
315
360
405
450
495
540
585
630
675
720
765
810
855
900
t t
-0,2
-0,4
W
270
-0,6
Stała tłumienia
R
2L
2
R C
2
2
Pulsacja drgań tłumionych t 2.ft 0 0 1
4 L
REZONANS
Im
R
R1
C
R1 < R 2 R 3
L
R2
R3
u=Umsin t
F = Fmsin t
0
Prąd płynący w obwodzie
Im
Amplituda prądu
W przypadku
rezonansu
ω = ω0 =
i = Imsint
1
LC
Um
1
R 2 ωL
ωC
U
Im m
R
2
UKŁAD DRGAJĄCY OTWARTY
U
U
U
U
Przy stałym napięciu zasilającym,
z rozciągniętego obwodu
powstaje dipol elektryczny.
U
I
U
I
Przy zmiennym napięciu zasilającym, ładunek
przepływając między okładkami kondensatora
wytwarza zmienne pole elektryczne i magnetyczne.
Hipoteza Maxwella (1864) – Drgający układ otwarty promieniuje falę elektromagnetyczną.
„Powstanie fali elektromagnetycznej wymaga istnienia zmiennego ruchu ładunków, lecz
fala, która już powstała, sama sobie zawdzięcza zdolność rozchodzenia się w przestrzeni
– w przypadku braku adsorpcji – na nieskończoną odległość i w nieograniczonym czasie.
POCZĄTKI RADIOKOMUNIKACJI
K
Kierunek
propagacji
Z teorii Maxwella wynika, że prędkość rozchodzenia się fali elektromagnetycznej:
m
vfali
2,9979.10 c
0 0
s
1
8
Światło jest więc falą elektromagnetyczną !
1864 – Maxwell formułuje teorię fal elektromagnetycznych
1887 – Hertz potwierdza doświadczalnie hipotezę Maxwella
1899 – Marconi nawiązuje łączność radiową przez kanał La Manche
1901 – Marconi nawiązuje łączność radiową przez Atlantyk