Stanisław Kasjan i Piotr Malicki
Matematyczne modele współpracy i konfliktu
- teoria gier w praktyce
(Kurs letni 2010)
Materiały dydaktyczne dla studentów II-go roku matematyki
Wydział Matematyki i Informatyki
Uniwersytet Mikołaja Kopernika
Toruń 2010
Projekt współfinansowany ze środków Unii Europejskiej w ramach
Europejskiego Funduszu Społecznego
SPIS TREŚCI
2
Spis treści
1 Historia teorii gier
3
2 Gry w postaci ekstensywnej
4
3 Gry w postaci strategicznej
12
4 Gry kooperacyjne
24
5 Gry dwuosobowe o sumie zerowej
31
6 Zadania i problemy
43
Spis Literatury
54
1. HISTORIA TEORII GIER
3
1. Historia teorii gier
Pierwsze ogólniejsze opracowanie, w którym odnajdujemy idee teorii gier to
Researches into the Mathematical Principles of the Theory of Wealth Antoina
Augustina Cournota z roku 1838. W pracy tej Cournot rozważa model duopolu
i pewną wersję punktu równowagi Nasha. Prawdziwy rozwój teorii gier nastąpił
w wieku XX. Zajmował się nią między innymi Emil Borel a przede wszystkim
John von Neumann, który opublikował na ten temat serię prac w roku 1928.
W roku 1944 wraz z Oskarem Morgensternem wydał książkę The Theory of
Games and Economic Behaviour. Zawierała ona m.in. metodę rozwiązywania
gier macierzowych. W tym okresie teorią gier zajmował się polski matematyk
Hugo Steinhaus, który napisał na ten temat pracę w roku 1925.
Do początku lat 50-tych teoria gier więcej niż dwu - osobowych zajmowała
się głównie grami kooperacyjnymi, problemami zawiązywania stabilnych koalicji. W roku 1951 John Nash wprowadził swoją definicję punktu równowagi
niekooperacyjnej gry n-osobowej.
W latach 50-tych teoria gier rozwijała się gwałtownie, wtedy powstały klasyczne dziś pojęcia takie jak: rdzeń, wartość Shapleya, gra w postaci ekstensywnej, gra powtarzana. Teorię gier zaczęto stosować w naukach politycznych.
W roku 1965 Reinhard Selten wprowadził pojęcie punktu pełnej równowagi (subgame perfect equilibrium). Dwa lata później John Harsanyi rozwinął koncepcję gier z informacją kompletną i gier bayesowskich. Wprowadzenie
i rozwinięcie pojęcia równowagi uhonorowano w roku 1994 nagrodą Nobla z
ekonomii dla Harsanyi’ego, Nasha i Seltena.
W latach 70-tych teoria gier stosowana była w biologii, głównie dzięki pojęciu strategii ewolucyjnie stabilnych wprowadzonych przez Jaohna Maynarda
Smitha.
W roku 2005 nagrodę Nobla z ekonomii przyznano Robertowi Aumannowi
i Thomasowi Schellingowi za „analizę w ramach teorii gier, która może pomóc
w rozwiązywaniu konfliktów w handlu i biznesie, a nawet uniknąć wojny.”
W roku 2007 nagrodę Nobla (też z ekonomii) za zastosowania teorii gier
dostali Leonid Hurwicz, Eric S. Maskin, Roger B. Myerson.
Podstawowym źródłem na podstawie którego przygotowano kurs jest książka [9]. Stamtąd zaczerpnięto też wiele przykładów i zadań. Opierano się również na [1], [3], [10], [2]. Niektóre przykłady i zadania zaczerpnięto z [4] i [8].
Korzystano też ze źródeł dostępnych w internecie.
2. GRY W POSTACI EKSTENSYWNEJ
4
2. Gry w postaci ekstensywnej
Najprostsze fakty teorii gier dotyczą chyba tzw. gier w postaci ekstensywnej,
czyli gier, w których gracze wykonują swoje ruchy po kolei. Przykładem takiej
gry może być dwuosobowa „gra w zbieranie kamieni”, zwana w literaturze Nim,
polegająca na tym, że ze zbioru n kamieni (najczęściej n = 5) dwaj gracze
zabierają na zmianę po 1 lub 2 kamienie; przegrywa biorący ostatni kamień.
Okazuje się, że gdy n = 5 gracz rozpoczynający może zagwarantować sobie
wygraną. Jego strategia zwycięska nakazuje mu w pierwszym ruchu zabrać
1 kamień, a w następnym pozostawić 1 kamień przeciwnikowi - o ile jest to
możliwe.
Okaże się, że każda taka gra jest zdeterminowana, tzn. jeden z graczy może
sobie zagwarantować wygraną (lub remis, jeśli reguły gry go dopuszczają).
„Taka gra” oznacza tutaj grę, która
• jest skończona (reguły gry dopuszczają tylko skończoną liczbę możliwych
przebiegów),
• gracze wykonują ruchy niejednocześnie i są w pełni informowani o dotychczasowym przebiegu gry,
Z sytuacjami takimi rzadko spotykamy się w rzeczywistych zastosowaniach,
pojęcie gry w postaci ekstensywnej modyfikuje się więc na różne sposoby (ruchy losowe, niekompletna informacja), my rozważać będziemy jednak model
najprostszy.
Bardziej „życiowych” przykładów dostarczają np. procesy negocjacji. Wyobraźmy sobie następującą sytuację. Dwaj właściciele domków położonych 200
m od siebie negocjują lokalizację doprowadzenia wodociągu w ich okolicę. Inwestycji tej każdy z nich przypisuje wartość 300, jednak korzyść ta zmniejszona
będzie o 10×(odległość doprowadzenia od domu); trzeba bowiem na własny
koszt doprowadzić stamtąd wodę do swojej posesji.
Ponadto zakłada się, że ze względu na inflację szacowana korzyść maleje z
czasem: jeśli decyzja zapadnie w k-tej rundzie negocjacji, to korzyść zdyskontować należy z czynnikiem δ k−1 , gdzie δ = 0, 9.
Jakie oferty należy składać, jakie akceptować?
2.1. Niech X będzie zbiorem niepustym. Jeśli h = (y1 , ..., yk ) jest ciągiem
skończonym o wyrazach w X oraz h′ = (x1 , ..., xn , ...) - przeliczalnym, to przez
(h, h′ ) oznaczamy ciąg (y1 , ..., yk , x1 , ..., xn , ...). Niech ∅ oznacza ciąg pusty o
2. GRY W POSTACI EKSTENSYWNEJ
5
długości 0. Dla danego ciągu przeliczalnego h przez ℓ(h) oznaczamy jego długość.
W zbiorze ciągów przeliczalnych wprowadzamy relację częściowego porządku określoną następująco: h h′ wtedy i tylko wtedy, gdy h′ = (h, h′′ ) dla
pewnego h′′ . Mówimy, że h jest odcinkiem początkowym h′ . Dopuszczamy
h′′ = ∅. Oczywiście h musi być ciągiem skończonym gdy h′′ 6= ∅.
Definicja. Zbiór ciągów przeliczalnych o wyrazach w X nazywamy zbiorem historii nad X, o ile
(1) ∅ ∈ H,
(2) z tego, że h h′ ∈ H wynika, że h ∈ H,
(3) jeśli każdy skończony odcinek początkowy historii h o nieskończonej
długości należy do H, to h ∈ H.
Niech H będzie ustalonym zbiorem historii nad X. Interpretować go będziemy jako zbiór wszystkich możliwych przebiegów pewnej gry. Dla h ∈ H
określamy
h→ = {x ∈ X : (h, x) ∈ H}.
O h→ = {x ∈ X : (h, x) ∈ H} myślimy jako o zbiorze ruchów dopuszczalnych
po h, tzn. w sytuacji gdy dotychczasowy przebieg gry opisany jest przez h.
Zbiorem historii zakończonych nazywamy zbiór
Z(H) = {h ∈ H : h→ = ∅}.
Definicja. n-osobowa gra w postaci ekstensywnej jest to układ
Γ = (H, P, u1, ..., un ),
gdzie H jest zbiorem historii nad pewnym zbiorem X,
ui : Z(H)−→R
dla i = 1, ..., n oraz P : H \ Z(H)−→{1, ..., n}.
Graczy utożsamiamy z liczbami 1, ..., n. P nazywamy funkcją gracza,
określa ona który z graczy wykonuje ruch po danej historii. u1 , ..., un to funkcje wypłaty przypisujące każdej historii zakończonej układ wypłat dla poszczególnych graczy. Grę nazywamy skończoną, o ile skończony jest zbiór H.
Przykład 1. Opisaną powyżej grę Nimn przedstawiamy następująco:
Nimn = (H, P, u1, u2 ),
2. GRY W POSTACI EKSTENSYWNEJ
6
gdzie H składa się z ciągów o wyrazach 1 lub 2, których suma nie przekracza
n, P (h) = 1 o ile ℓ(h) jest liczbą parzystą, P (h) = 2 w przeciwnym wypadku,
u1 (h) = 1 gdy ℓ(h) jest liczbą parzystą, u1 (h) = −1 w przeciwnym wypadku.
Strategia gracza jest to instrukcja zachowania w każdej sytuacji, która może
zaistnieć w grze. Niech Γ = (H, P, u1, ..., un ), będzie n-osobową grą w postaci
ekstensywnej.
Przykład 2. Negocjacje dotyczące lokalizacji doprowadzenia wody można
modelować za pomocą następujacej gry w postaci ekstensywnej.
• zbiór ruchów X = [0, 200] ∪ {A, R}. Element x ∈ [0, 200] odpowiada
propozycji zlokalizowania doprowadzenia wody w odległości x metrów od
domku B i 200−x od C. A (odp. R) oznacza akceptację (odp. odrzucenie)
propozycji.
• Zbiór historii składa się ze wszystkich ciągów jednej z następujących
postaci:
(x(1) , R, x(2) , R, ..., R, x(k) , A),
(x(1) , R, x(2) , R, ..., R, x(k) , R, ...),
i wszystkich ich odcinków początkowych, gdzie x(j) ∈ [0, 200].
• Kolejność wykonywania ruchów jest następująca: B składa propozycję, C
akceptuje ją lub odrzuca, jeśli odrzuca - składa własną ofertę; B akceptuje
lub odrzuca .... Formalnie, P (h) = B gdy ℓ(h) daje resztę 0 lub 1 przy
dzieleniu przez 4, P (h) = C w przeciwnym wypadku.
• Funkcje wypłaty: jeśli h = (x(1) , R, x(2) , R, ..., R, x(k) , A), to uB (h) =
δ k−1 (300−10x(k) ), uC (h) = δ k−1 (100+10x(k)). Ponadto uB (h) = uC (h) =
0 dla nieskończonych historii h.
Definicja. Niech Hi = P −1 (i). Strategią gracza i w grze Γ nazywamy dowolną funkcję
σ : Hi −→X
2. GRY W POSTACI EKSTENSYWNEJ
taką, że σ(h) ∈ h→ dla dowolnej h ∈ Hi .
7
Zbiór wszystkich strategii gracza i w grze Γ oznaczamy Si (Γ).
Historię h nazywamy zgodną ze strategią σ gracza i, o ile dla dowolnej
h′ ≺ h takiej, że P (h′ ) = i zachodzi (h′ , σ(h′ )) h.
Lemat. Dla dowolnego układu σ = (σ1 , ..., σn ) graczy 1, ..., n w grze Γ istnieje dokładnie jedna historia zakończona zgodna z każdą ze strategii σ1 , ..., σn .
Taką strategię nazywamy wynikiem stosowania układu σ i oznaczamy
hσ . Używając tego przyporządkowania możemy zdefiniować funkcje wypłaty
na zbiorze układów strategii, tj. określamy funkcje
ui : S1 (Γ) × . . . × Sn (Γ)−→R
wzorem ui (σ) = ui (hσ ), i = 1, . . . , n.
2.2. Rozważmy teraz klasę gier WPR składającą się ze skończonych gier
dwuosobowych w postaci ekstensywnej Γ = (H, P, u1, u2 ) takich, że u1 = −u2
oraz wartości ui należących do zbioru {−1, 0, 1}.
Strategię σi gracza i w takiej grze nazywamy zwycięską, o ile ui (h) ≥ 0 dla
dowolnej historii zakończonej h zgodnej z σi . Oznacza to, że stosując strategię
σi gracz i może zagwarantować sobie wygraną lub remis.
Twierdzenie (Zermelo). W każdej grze z klasy WPR jeden z graczy posiada
strategię zwycięską.
Dowód zamieszczamy w 2.4.
2.3. Do dowodu tego twierdzenia przydatne będzie pojęcie podgry. Niech
Γ = (H, P, u1, ..., un ) oraz f ∈ H. Zbiór ciągów h′ takich, (f, h′ ) ∈ H oznaczmy
przez Hf oraz określmy funkcję
ιf : Hf −→H, h′ 7→ (f, h′ ).
Podgrą Γ następującą po f nazywamy grę
Γf = (Hf , P f , uf1 , ..., ufn ),
gdzie Pf = P ◦ ιf , ufi = ui ◦ ιf .
2. GRY W POSTACI EKSTENSYWNEJ
8
Jeśli σi jest strategią gracza i w grze Γ, to σif = σi ◦ ιf jest strategią gracza
i w grze Γf .
2.4. Dowód twierdzenia Zermela. Indukcja na |H|. Jeśli |H| = 1 (czyli
H = {∅}, w grze nic się nie dzieje), to teza jest oczywista. Załóżmy teraz, że
|H| > 1 i niech ∅→ = {x1 , ..., xt }. Możemy założyć, że P (∅) = 1. Niech Wi
oznacza zbiór tych gier WPR, w których gracz i ma strategię zwycięską.
Jeśli Γxj ∈ W1 dla pewnego j, to zwycięską dla 1 jest dowolna strategia
x
σ1 taka, że σ1 (∅) = xj oraz σ1 j jest strategią zwycięską dla 1 w Γxj . Wtedy
Γ ∈ W1 .
Jeśli zaś Γxj ∈ W2 dla dowolnego j = 1, ..., t, to dowolna strategia σ2 jest
x
zwycięska dla 2 w Γ, o ile σ2 j jest zwycięska dla 2 w Γxj dla dowolnego j.
Wtedy Γ ∈ W2 .
Uwaga. (1) Założenie skończoności gry jest potrzebne. Przykład niezdeterminowanej gry nieskończonej niełatwo wymyślić.
(2) Oczywiście gry niedopuszczające remisu (ui (h) 6= 0 dla dowolnego h)
nie mogą jednocześnie należeć do W1 i do W2 . Inne gry mogą, przykładem jest
gra w kółko i krzyżyk.
(3) Dowód twierdzenia jest konstruktywny, jednak w przypadku ciekawszych gier złożoność obliczeniowa problemu jest tak wielka, że jest on konstruktywny jedynie w teorii. Twierdzenie stosuje się bowiem również np. do
gry w szachy, odpowiednio zmodyfikowanej tak, by była grą skończoną. Można na przykład przyjąć regułę, że jeśli na szachownicy po raz trzeci pojawia
się ta sama konfiguracja, to gra kończy się remisem.
2.5. Równowaga w grach ekstensywnych. Niech Γ = (H, P, u1, ..., un )
będzie grą w postaci ekstensywnej. Układ σ = (σ1 , ..., σn ) strategii w grze Γ
jest punktem równowagi tej gry, jeśli żadnemu z graczy nie opłaca się odstąpić
od swojej strategii przy założeniu, że nie uczynią tego pozostali. Formalnie:
Definicja. Układ σ = (σ1 , ..., σn ) strategii graczy 1, ..., n odpowiednio jest
punktem równowagi gry Γ, gdy dla dowolnej strategii σi′ gracza i zachodzi nierówność
ui (σi ) ≥ ui (σi′ , σ−i ).
Zbiór punktów równowagi gry Γ oznaczamy Eq(Γ) Okazuje się, że lepiej
2. GRY W POSTACI EKSTENSYWNEJ
9
sprawdza się pewna modyfikacja tego pojęcia.
Definicja. Układ σ = (σ1 , ..., σn ) strategii graczy 1, ..., n odpowiednio jest
punktem pełnej równowagi (subgame perfect equilibrium) gry Γ, o ile dla dowolnej historii h ∈ H indukowany układ σ h jest punktem równowagi Γh .
Zbiór punktów pełnej równowagi gry Γ oznaczamy SP E(Γ).
Mówimy, że układ σ = (σ1 , ..., σn ) strategii w grze Γ ma własność pojedynczego odchylenia (one deviation property), o ile dla dowolnego i i dowolnej
strategii σi′ gracza i oraz historii h takiej, że σi′ (h′ ) = σ(h′ ) dla każdej historii
h′ takiej, że h ≺ h′ zachodzi warunek:
′
h
uhi (σ h ) ≥ uhi ((σ−i
, σih )).
Jest oczywiste, że punkt pełnej równowagi ma własność pojedynczego odchylenia.
Lemat. Niech Γ będzie grą skończoną. Układ strategii σ = (σ1 , ..., σn ) jest
punktem pełnej równowagi gry Γ wtedy i tylko wtedy, gdy ma własność pojedynczego odchylenia.
Dowód. Oczywiście wystarczy pokazać, że jest to warunek wystarczający.
Załóżmy, że σ ma własność pojedynczego odchylenia. Ponieważ własność ta
dziedziczona jest na indukowane układy strategii w podgrach, więc wystarczy
pokazać, że σ jest punktem równowagi Γ.
Załóżmy, że tak nie jest i niech σi′ będzie strategią gracza i taką, że ui(σ) <
ui(σ−i , σi′ ). Mówimy wtedy, że σi′ jest korzystnym odchyleniem od σi względem
σ−i . Wybierzmy σi′ tak, by liczba historii h takich, że σi′ (h) 6= σi (h) jest minimalna. Niech h∗ będzie najdłuższą z tych historii. Określamy nową strategię
σi′′ gracza i wzorem
′
σi (h), h 6= h∗ ,
′′
σi (h) =
σi (h), h = h∗ .
Rozważmy dwa przypadki:
1. h∗ hσ′ , tzn. h∗ nie jest zgodna z σ ′ , gdzie σ ′ = (σ−i , σi′ ). Wtedy
wyniki stosowania układów (σ−i , σi′′ ) i (σ−i , σi′ ) są równe, zatem σi′′ jest także
korzystnym odchyleniem od σi′ względem σ−i , co przeczy wyborowi σi .
2. h∗ hσ′ .
Z warunku pojedynczego odchylenia wynika, że
′′
′
h∗
h∗
, σi h∗ ) = uhi ∗ (σ h∗ ) ≥ uhi ∗ (σ−i
, σih∗ ).
uhi ∗ (σ−i
2. GRY W POSTACI EKSTENSYWNEJ
10
Z drugiej strony, ponieważ h∗ jest zgodna zarówno z σi′ jak i z σi′′ , to
′′
h∗
ui (σ−i , σi′′ ) = uhi ∗ (σ−i
, σi h∗ )
oraz
′
h∗
, σih∗ ),
ui (σ−i , σi′ ) = ·uhi ∗ (σ−i
Stąd
ui (σ−i , σi′′ ) ≥ ui (σ−i , σi′ ) > ui(σ),
zatem σi′′ jest korzystnym odchyleniem od σ, co przeczy wyborowi σ ′ .
Lemat powyższy można też udowodnić w nieco ogólniejszej wersji. Na przykład, zamiast skończoności gry wystarczy zakładać, że gra ma skończony horyzont, tzn. nie zawiera historii nieskończonej długości. Dowód w takim przypadku przebiega jak wyżej, po uprzednim udowodnieniu istnienia korzystnego
odchylenia od σi różniącego się od σi tylko dla skończenie wielu historii.
Założenia o skończoności horyzontu nie można już opuścić, można je jedynie osłabiać, np. założyć, że istnieją liczby a1 , ..., an takie, że ui (h) = ai dla
dowolnej historii h nieskończonej długości oraz ai ≤ ui (h) dla dowolnej historii
i dowolnego i = 1, ..., n. Założenie to oznacza, że historie nieskończonej długości nie są „konkurencyjne”. Taka wersja lematu o pojedynczym odchyleniu
znajduje zastosowanie np. w teorii gier targu z naprzemiennymi ofertami.
Twierdzenie. Załóżmy, że Γ jest grą skończoną. Wtedy istnieje punkt pełnej równowagi w Γ.
Dowód. Niech ℓ(Γ) będzie maksymalną długością historii w Γ. Przez indukcję na ℓ(Γ(h)) skonstruujemy dla dowolnej historii h ∈ H element R(h) ∈
Z(H) oraz - jeśli h ∈
/ Z(H) - element xh ∈ h→ .
Jeśli ℓ(Γ(h)) = 0, to przyjmujemy Rh = h.
Załóżmy, że dla historii h takich, że ℓ(h) ≤ k elementy R(h) i xh są zdefiniowane i załóżmy, że ℓ(Γ(h)) = k + 1. Wtedy ℓ(Γ(h′ )) ≤ k dla dowolnej
historii postaci h′ = (h, x), x ∈ h→ .
Załóżmy, że P (h) = i. Niech xh będzie elementem h→ takim, że
ui(R(h, x))
ui(R(h, xh )) = max
→
x∈h
oraz przyjmijmy R(h) = R(h, xh ).
Definiujemy teraz strategię σj gracza j wzorem: σj (h) = xh dla h ∈ Hj .
2. GRY W POSTACI EKSTENSYWNEJ
11
Wykażemy, że σ = (σ1 , ..., σn ) ma własność pojedynczego odchylenia, co
na mocy powyższego lematu wystarczy do dowodu, że jest to pełny punkt
równowagi.
W tym celu najpierw zauważmy, że R(h) jest wynikiem stosowania układu
h
σ w grze Γh , dla dowolnej historii h. Łatwo to wykazać przez indukcję na
ℓ(Γ(h)).
Niech teraz σi′ będzie strategią gracza i oraz niech h będzie historią spełniającą warunek σi′ (h′ ) = σi (h′ ) dla każdej historii h′ takiej, że h ≺ h′ . Bez straty
ogólności możemy założyć, że P (h) = i (w przeciwnym wypadku po prostu
σih = σi′h ). Oznaczmy σi′ (h) = x. Wtedy
h
, σi′h ) = ui(R(h, x)) ≤ ui (R(h, xh )) = uhi (σ h ).
uhi (σ−i
Ostatnia nierówność wynika z wyboru xh = σi (h). Dowód jest zakończony. 2.6. Gry targu z naprzemiennymi ofertami. Uogólniając przykład dotyczący lokalizacji doprowadzenia wody dochodzimy do wprowadzonych przez
A. Rubinsteina gier targu z naprzemiennymi ofertami.
Zakładamy, że gracze 1 i 2 negocjują wybór elementu ze zbioru
X = Xψ = {(x1 , x2 ) ∈ R2 : x1 ≥ 0, x2 ≥ 0, x2 ≤ ψ(x1 )},
gdzie ψ : [0, b1 ]−→R jest pewną ustaloną funkcją ciągłą i malejącą taką, że
ψ(b1 ) = 0. Ustalmy też czynnik dyskontujący δ ∈ (0, 1).
Określamy grę Γψ,δ = (H, P, u1, u2 ), gdzie
• Zbiór historii składa się ze wszystkich ciągów jednej z następujących
postaci:
(p(1) , R, p(2) , R, ..., R, p(k) , A),
(p(1) , R, p(2) , R, ..., R, p(k) , R, ...),
i wszystkich ich odcinków początkowych, gdzie p(j) ∈ Xψ .
• Kolejność wykonywania ruchów jest następująca: gracz 1 składa propozycję, gracz 2 akceptuje ją lub odrzuca, jeśli odrzuca - składa własną
ofertę; gracz 1 akceptuje lub odrzuca .... Formalnie, P (h) = B gdy ℓ(h)
daje resztę 0 lub 1 przy dzieleniu przez 4, P (h) = C w przeciwnym
wypadku.
3. GRY W POSTACI STRATEGICZNEJ
12
• Funkcje wypłaty: jeśli h = (p(1) , R, p(2) , R, . . . , R, p(k) , A), to u1 (h) =
δ k−1 (x(k) ), u2 (h) = δ k−1 (y (k)), gdzie p(k) = (x(k) , y (k)). Ponadto u1 (h) =
u2 (h) = 0 dla nieskończonych historii h.
Twierdzenie (A. Rubinstein.) Załóżmy, że funkcja ψ jest dwukrotnie różniczkowalna w (0, b1 ) i wklęsła, tzn. ψ ′′ (x) < 0 dla x ∈ (0, b1 ). Wtedy
(1) Istnieje dokładnie jedna (zależna od δ) para (x∗1 , x∗2 ) ∈ [0, b1 ] taka, że
δψ(x∗2 ) = ψ(x∗1 ) oraz δx∗1 = x∗2 .
(2) Gra targu Γψ,δ ma punkty pełnej równowagi. Dokładniej, para strategii
(σ1 , σ2 ) jest punktem pełnej równowagi tej gry wtedy i tylko wtedy, gdy
1. σ1 (p(1) , ..., R) = (x∗1 , ψ(x∗1 ))
σ1 (p(1) , ..., p(k) ) = A gdy x(k) > x∗2
σ1 (p(1) , ..., p(k) ) = R gdy x(k) < x∗2 ,
2. σ2 (p(1) , ..., R) = (x∗2 , ψ(x∗2 ))
σ2 (p(1) , ..., p(k) ) = A gdy y (k) > ψ(x∗1 )
σ1 (p(1) , ..., p(k) ) = R gdy y (k) < ψ(x∗1 ).
Zauważmy, że punkt pełnej równowagi nie jest wyznaczony całkiem jednoznacznie - nie jest w pełni określone zachowanie graczy w sytuacjach x(k) = x∗2 ,
y (k) = ψ(x∗1 ).
3. Gry w postaci strategicznej
Definicja 3.1. n-osobową grą w postaci strategicznej nazywamy układ
G = (S1 , ..., Sn , u1 , ..., un ),
gdzie S1 , ..., Sn są niepustymi zbiorami, zwanymi zbiorami strategii graczy 1, ..., n
odpowiednio, zaś
ui : S1 × ... × Sn −→R,
i = 1, ..., n są funkcjami zwanymi funkcjami wypłaty poszczególnych graczy.
Grę G nazywamy skończoną, o ile wszystkie S1 , ..., Sn są skończone.
Tak określona gra jest to model sytuacji, w której gracze 1, ..., n wykonują
jednocześnie ruch - wybierają element z odpowiedniego zbioru Si . Następnie
3. GRY W POSTACI STRATEGICZNEJ
13
każdy z nich otrzymuje „wypłatę” zależną od ruchów wykonanych przez wszystkich graczy. Wartości wypłat opisane są przez funkcje ui .
Powiemy, że gry G = (S1 , ..., Sn , u1 , ..., un ) i G′ = (S1′ , ..., Sn′ , u′1 , ..., u′n ) są
izomorficzne, o ile istnieją bijekcje φi : Si −→Si′ takie, że
u′i(φ1 (s1 ), ..., φn (sn )) = ui (s1 , ..., sn ),
dla dowolnych s1 ∈ S1 ,...,sn ∈ Sn , i = 1, ..., n.
Używać będziemy następujących oznaczeń. Niech S = S1 × ... × Sn . Dla
elementu s ∈ S przez si oznaczamy i-tą współrzędną s, czyli s = (s1 , ..., sn ).
Ponadto niech
S−i = S1 × ... × Si−1 × Si+1 × ... × Sn
oraz s−i = (s1 , ..., si−1 , si+1 , ..., sn ) ∈ S−1 . Dla danego elementu t ∈ Si przez
(t, s−i) lub (s−i , t) oznaczamy (s1 , ..., si−1 , t, si+1, ..., sn ) ∈ S.
Definicja 3.2. (1) Strategia si ∈ Si jest najlepszą odpowiedzią na układ
s−i ∈ S−i , o ile dla dowolnej ti ∈ Si zachodzi nierówność
ui (si , s−i ) ≥ ui (ti , s−i ).
(2) Układ s∗ ∈ S jest punktem równowagi G, o ile s∗i jest najlepszą
odpowiedzią na s∗−i dla dowolnego i = 1, . . . , n. Inaczej: gdy dla dowolnego
i = 1, ..., n i dowolnej strategii si ∈ Si zachodzi nierówność
ui (s∗ ) ≥ ui (si , s∗−i ).
(3) Strategia si ∈ Si dominuje strategię s′i ∈ Si , o ile dla dowolnego układu
t−1 ∈ S−i zachodzi nierówność
ui (si , t−i ) > ui (s′i , t−i ).
(4) Strategia si ∈ Si słabo dominuje strategię s′i ∈ Si , o ile dla dowolnego
układu t−1 ∈ S−i zachodzi nierówność
ui (si , t−i ) ≥ ui(s′i , t−i )
oraz istnieje układ t−i taki, że nierówność jest ostra.
Przypuśćmy, że G = (S1 , S2 , u1 , u2) jest dwuosobową grą w postaci strategicznej. Załóżmy, że dla każdej strategii s1 ∈ S1 gracza 1 istnieje dokładnie
jedna najlepsza odpowiedź gracza 2, oznaczmy ją r2 (s1 ). W ten sposób określić
3. GRY W POSTACI STRATEGICZNEJ
14
możemy tzw. funkcję reakcji gracza 2 r2 : S1 −→S2 . Załóżmy także, że istnieje
podobna funkcja reakcji r1 : S2 −→S1 gracza 1. W tej sytuacji para (s∗1 , s2 ) jest
punktem równowagi gry G wtedy i tylko wtedy, gdy r2 (s∗1 ) = s∗2 i r1 (s∗2 ) = s∗1 .
Znalezienie punktu równowagi sprowadza się zatem do rozwiązania równania
r2 (r1 (s2 )) = s2 czyli do znalezienia punktu stałego funkcji r2 ◦ r1 : S2 −→S2 .
Problem w tym, że na ogół funkcje reakcji nie są dobrze zdefiniowane,
niemniej idea powiązania punktów równowagi z punktami stałymi pewnych
odwzorowań jest w teorii gier bardzo ważna.
Z każdą grą w postaci ekstensywnej Γ stowarzyszyć możemy jej postać
strategiczną, czyli grę w postaci strategicznej
S(Γ) = (S1 (Γ), ..., Sn (Γ), u1 , ..., un ),
gdzie S(Γ) jest zbiorem wszystkich strategii gracza i w grze Γ oraz
ui (σ) = ui(hσ )
dla i = 1, ..., n i dowolnego σ ∈ S1 (Γ) × ... × Sn (Γ), zob. 2.1.
Przykład - zadanie. Znaleźć funkcje reakcji oraz punkty równowagi gry
G = (S1 , S2 , u1 , u2 ), gdzie S1 = S2 = [0, 1] oraz
u1(x, y) = −x2 + 2xy + 6, u2 (x, y) = −y 2 + 4x2 y.
Dwuosobową grę skończoną wygodnie jest opisywać przy pomocy tabelki,
w której ruchy gracza 1 odpowiadają wierszom, ruchy gracza 2 - kolumnom,
zaś w polu na przecięciu danego wiersza i danej kolumny znajduje się para
liczb - wartości funkcji wypłaty poszczególnych graczy.
Przykłady.
1. Dylemat więźnia.
L
Z
L 3,3 0,5
Z 5,0 1,1
Strategia Z dominuje L. Para (Z, Z) jest jedynym punktem równowagi tej
gry.
2. BoS
B
B 2,1
S 0,0
S
0,0
1,2
3. GRY W POSTACI STRATEGICZNEJ
15
Dominacja nie występuje; istnieją dwa punkty równowagi: (B, B), (S, S).
3. Gra bez punktu równowagi:
a
b
a 2,1 0,3
b 1,4 1,2
Tego typu gry nazywa się także grami bimacierzowymi, zob. 3.3 poniżej.
Ważnymi przykładami gier są gry opisujące zagadnienie oligopolu. Załóżmy, że na rynku funkcjonuje n producentów jednego towaru. W danym
momencie każdy z nich ustala wielkość produkcji. Zakładamy, że całość wyprodukowanego towaru jest sprzedawana na rynku po cenie p(q) zależnej od
podaży q. Wyprodukowanie qi jednostek towaru wiąże się dla producenta o
numerze i z kosztem ci (qi ). Przyjmujemy, że zbiór możliwych poziomów produkcji i-tego producenta jest przedziałem Si = [ai , bi ]. Sytuację tę możemy
modelować jako grę
G = (S1 , ..., Sn , u1 , ..., un ),
gdzie funkcja wypłaty - dochodu gracza i wyraża się wzorem
ui(q1 , ..., qn ) = qi p(q1 + . . . + qn ) − ci (qi ).
Przykład - zadanie. Rozważmy duopol (tzn. oligopol dla n = 2) określony przez następujące dane: S1 = S2 = [0, 1], p(q) = 2 − q, c1 (q) = c2 (q) = q.
Co doradzić graczom? Czy istnieją funkcje reakcji, punkty równowagi?
3.3. Niech G = (S1 , ..., Sn , u1, ..., un ) będzie n-osobową grą skończoną.
Dla skończonego zbioru T oznaczmy
X
Te = {f : T → [0, 1] :
f (t) = 1}.
t∈T
Utożsamiać będziemy T z podzbiorem Te w naturalny sposób.
Mieszanym rozszerzeniem gry skończonej G nazywamy grę
e = (Se1 , ..., S
fn , ue1, ..., u
G
fn )
fn → R dana jest wzorem
gdzie uei : Se1 × ... × S
X
uei (f1 , ..., fn ) =
f1 (s1 )...fn (sn )
(s1 ,...,sn)∈S
3. GRY W POSTACI STRATEGICZNEJ
16
dla i = 1, ..., n.
Na ogół traktujemy Si jako podzbiór Sei utożsamiając s ∈ Si z funkcją
δs : Si −→R taką, że δs (t) = 0 gdy s 6= t oraz δs (s) = 1. Wygodna jest też
e
następująca
P notacja: element f ∈ Si zapisujemy jako formalną kombinację
wypukłą s∈Si f (s)s.
Uwaga. u
ei jest funkcją liniową ze względu na każdą zmienną osobno. Wynika z tego, że dla dowolnych i, j = 1, ..., n, f−j ∈ S−j zachodzi równość
max u
ei(f−j , g) = max u
ei (f−j , sj ),
g∈Sej
sj ∈Sj
ponieważ Sej jest powłoką wypukłą Sj .
Elementy Sei nazywamy strategiami mieszanymi gracza i, zaś elementy
Si ⊂ Sei - jego strategiami czystymi. Nośnikiem strategii fi ∈ Sei nazywamy
zbiór
supp(fi ) = {s ∈ Si : fi (s) > 0}.
Łatwo zauważyć, że dla danej macierzy A mieszane rozszerzenie gry g(A)
izomorficzne jest z grą G(A).
Wygodnie jest wprowadzić pojęcie gry bimacierzowej.
Para macierzy A, B rozmiaru m × n o współczynnikach rzeczywistych wyznacza grę dwuosobową g(A, B) = (S1 , S2 , u1 , u2 ), gdzie S1 = {1, ..., m}, S2 =
{1, ..., n}, u1 (i, j) = Aij , u2 (i, j) = Bij . Jej mieszane rozszerzenie oznaczamy
G(A, B) i utożsamiamy z grą
gdzie ∆k = {(x1 , ..., xk ) ∈ Rk+
xBy T .
(∆n , ∆m , ξA , ξB ),
P
: ki=1 xi = 1} oraz ξA (x, y) = xAy T , ξB (x, y) =
Twierdzenie. (J. Nash). Mieszane rozszerzenie gry skończonej posiada
punkt równowagi.
3.4. Twierdzenie to jest wnioskiem z ogólniejszego faktu.
Twierdzenie. Przypuśćmy, że G = (S1 , ..., Sn , u1 , ..., un ) jest grą spełniającą następujące warunki.
(a) Si jest zwartym i wypukłym podzbiorem przestrzeni euklidesowej Rni dla
i = 1, ..., n,
(b) funkcje ui są ciągłe,
3. GRY W POSTACI STRATEGICZNEJ
17
(c) funkcja ui jest wklęsła ze względu na i-tą zmienną dla i = 1, ..., n.
Wtedy G ma punkt równowagi.
Dowód. Niech S = S1 × ... × Sn . Określamy funkcję
F :S ×S →R
P
wzorem F (s, t) = ni=1 ui (s, (s−i, ti )).
Jest to odwzorowanie ciągłe, wklęsłe ze względu na druga zmienną.
Lemat. s∗ jest punktem równowagi G wtedy i tylko wtedy, gdy
F (s∗ , s∗ ) = max F (s∗ , t).
t∈S
Dowód lematu. Przypuśćmy, że s∗ jest punktem równowagi. niech t ∈
S. Wtedy dla każdego i zachodzi nierówność ui (s∗ ) ≥ ui (s∗−i , ti ). Sumując te
nierówności otrzymujemy F (s∗ , s∗ ) ≥ F (s∗ , t).
Implikację w druga stronę pokazujemy korzystając z nierówności F (s∗ , s∗ ) ≥
F (s∗ , (s∗−i, ti )).
Załóżmy, że gra nie ma punktu równowagi, co na mocy lematu równoważne
jest temu, że dla dowolnego s ∈ S istnieje t ∈ S takie, że F (s, s) < F (s, t).
Niech UtSoznacza zbiór {s ∈ S : F (s, s) < F (s, t)}. Z naszego założenia wynika,
że S = t∈S Ut . Zbiór S jest zwarty więc jest sumą skończenie wielu zbiorów
Ut , niech
S = Ut1 ∪ ... ∪ Utm
dla pewnych t1 , ..., tm ∈ S.
Dla j = 1, ..., m niech fj : S → R będzie funkcją określoną wzorem
fj (s) = max{0, F (tj , s) − F (tj , tj )}.
Są to funkcje ciągłe. Niech f = f1 + ... + fm . Funkcja f przyjmuje wartości
dodatnie.
Z wypukłości zbioru S wynika, że odwzorowanie φ : S → S dane wzorem
t 7→
m
X
fj (t)
j=1
f (t)
tj
3. GRY W POSTACI STRATEGICZNEJ
18
jest dobrze określone. Ponieważ jest ciągłe, ma punkt stały na mocy twierdzenia Brouwera1 . Niech φ(s∗ ) = s∗ . Wtedy korzystając z wklęsłości F ze
względu na drugą zmienną otrzymujemy
F (s∗ , s∗ ) = F (s∗ , φ(s∗)) = F (s∗ ,
m
X
fj (s∗ )
j=1
f (s∗ )
tj ) ≥
m
X
fj (s∗ )
j=1
f (s∗)
F (s∗ , tj ).
Z definicji funkcji fj wynika, że współczynniki niezerowe występują w powyższej sumie tylko przy składnikach F (s∗ , tj ) większych od F (s∗ , s∗ ). Ale to oznacza, że prawa strona tej nierówności jest większa od F (s∗ , s∗ ), co prowadzi do
sprzeczności.
Twierdzenie Nasha otrzymujemy jako natychmiastowy wniosek z powyższego twierdzenia.
3.5. W pewnych sytuacjach do poszukiwania punktów równowagi mieszanego rozszerzenia użyć można następującego lematu.
e jej mieszanym
Niech G = (S1 , ..., Sn , u1 , ..., un ) będzie grą skończoną a G
rozszerzeniem. Nośnikiem strategii f ∈ Sei nazywamy zbiór supp(f ) = {s ∈
Si : f (s) > 0}.
Lemat. Niech f = (f1 , ..., fn ) ∈ Se1 × ... × Sen . Następujące warunki są
równoważne:
e
(a) f jest punktem równowagi G.
(b) Dla dowolnego i dowolny element nośnika strategii fi jest najlepszą
odpowiedzią na f−i .
Dowód. (a) ⇒ (b) Przypuśćmy, że s ∈ supp(fi ) oraz u
ei (t, f−i ) > u
ei (s, f−i )
′
′
dla pewnego s ∈ Si . Określamy fi = fi − f (s)s + f (s)t. Wtedy fi ∈ Sei oraz
u
ei(fi′ , f−i ) = u
ei (f ) + f (s)(e
ui(t, f−i ) − u
ei(s, f−i )) > u
ei (f ),
e
co przeczy założeniu, że f jest punktem równowagi G.
(b) ⇒ (a) Zakładając (b) stwierdzamy, że
u
ei (fi , f−i ) = max u
ei (s, f−i) = max u
ei(g, f−i)
s∈Si
1
g∈Sei
Twierdzenie to mówi, że jeśli F : K−→K jest ciągłym przekształceniem zwartego i
wypukłego podzbioru K przestrzeni euklidesowej, to f ma punkt stały.
3. GRY W POSTACI STRATEGICZNEJ
dla dowolnego i. Stąd f jest punktem równowagi.
19
Wniosek. Jeśli f jest punktem równowagi oraz s, t ∈ supp(fi ), to
u
ei (s, f−i) = u
ei(t, f−i ).
Przykład. Dylemat kierowcy: Dwa pojazdy jadące naprzeciwko znalazły
się po dwóch stronach zwężenia jezdni. Ktoś musi ustąpić. Każdy ma do wyboru dwie strategie: G (jechać), i W (czekać). Niech e > 0 będzie czasem
oczekiwania na decyzję w wypadku, gdy obaj zamierzają się nawzajem przepuścić, d > 0 - czas zużyty na wycofanie pojazdu ze środka zwężenia, ti - czas
przejazdu przez zwężenie pojazdu i, i = 1, 2.
Zakładamy, że: e < d, t1 , t2 < 2d. Sytuację tę opisuje tabelka:
G
W
t2
t1
G −d − 2 , −d − 2
0, −t1
W
−t2 , 0
−e − t22 , −e − t21
Jeśli np. obaj naraz ruszą (G,G), to jeden z nich będzie się musiał wycofać
ze środka zwężenia. Przyjmujemy, że w drodze losowania rozstrzyga się który.
Obaj stracą czas d; wartość d + t22 jest średnią arytmetyczną wartości d (strata
w przypadku, gdy wycofuje się 2) i d + t2 (gdy wycofuje się 1). Można więc
interpretować to jako oczekiwaną wartość straty poniesionej przez gracza 1 w
przypadku wybrania przez obu strategii G.
Punktami równowagi mieszanego rozszerzenia tej gry są:
(G, W ), (W, G), θ1 G + (1 − θ1 )W, θ2 G + (1 − θ2 )W,
gdzie
e + t2i
.
d+e
Przykład - zadanie Zbadać zbiór punktów równowagi mieszanego rozszerzenia gry zadanej przy pomocy tabelki (Hawk-Dove):
H
D
H r − c, r − c 2r, 0 w zależności od r, c > 0.
1
r, 21 r
D
0, 2r
2
θi =
3.6. Równowaga i strategie dominowane. Niech G = (S1 , ..., Sn , u1 , ..., un )
będzie grą w postaci strategicznej. Powiemy, że gra H = (T1 , ..., Tn , v1 , ..., vn )
3. GRY W POSTACI STRATEGICZNEJ
20
powstała z G przez eliminację strategii dominowanych, o ile Ti ⊆ Si ,
i = 1, ..., n, vi jest ograniczeniem ui oraz każda strategia ze zbioru Si \ Ti
jest dominowana w grze G dla i = 1, ..., n. Dodatkowo zakładać będziemy, że
G 6= H.
Niech Eq(G) oznacza zbiór punktów równowagi gry G.
Twierdzenie. Przypuśćmy, że H powstaje z G przez eliminację strategii
dominowanych.
(a) Eq(G) ⊆ Eq(H)
(b) Jeśli dla dowolnego i oraz układu s−i ∈ S−i istnieje najlepsza odpowiedź
gracza i na s−i , to Eq(G) = Eq(H).
e = Eq(H).
e
(c) Jeśli G jest grą skończoną, to Eq(G)
Zauważmy, że warunek w (b) spełniony jest automatycznie, jeśli zbiory Si
są zwarte oraz funkcje wypłaty ciągłe, np. w przypadku gier skończonych lub
ich mieszanych rozszerzeń.
Dowód. Zauważmy, że strategia dominowana nie jest najlepszą odpowiedzią na żaden układ strategii. Stąd jeśli s = (s1 , ..., sn ) ∈ Eq(G), to si nie
należą do zbiorów Si \ Ti , bo te składają się ze strategii dominowanych. Zatem
s ∈ T1 × ... × Tn i oczywiście s ∈ Eq(H); udowodniliśmy (a).
(b) Przypuśćmy, że s = (s1 , ..., sn ) ∈ Eq(H). Każda najlepsza odpowiedź
na s−i w grze G należy do Ti , bo nie jest dominowana. Stąd si jest najlepszą
odpowiedzią na s−i w grze G, nie tylko w H. Wnioskujemy, że s = (s1 , ..., sn ) ∈
Eq(G).
(c) Wynika z lematu 3.3 i znów z faktu, że najlepsza odpowiedź na dowolny
układ strategii należy do Ti .
Usunięcie strategii dominowanych nie zmienia więc zbioru punktów równowagi. Można w pewnych sytuacjach uprościć tą metodą grę. Proces ten można
iterować.
Ciągiem eliminacyjnym dla gry G = (S1 , ..., Sn , u1 , ..., un ) nazywamy
ciąg gier G = G0 , G1 , G2 , ... o własnościach:
1. Gi+1 powstaje z Gi przez eliminację strategii dominowanych lub Gi+1 =
Gi dla i ≥ 0.
2. Jeśli Gi+1 = Gi , to Gj+1 = Gj dla wszystkich j ≥ i.
Stosować będziemy oznaczenia: Gi = (S1i , ..., Sni , u1 , ..., un ); użycie tych samych
oznaczeń dla ui i jej ograniczeń nie prowadzi do nieporozumień.
3. GRY W POSTACI STRATEGICZNEJ
21
T
m
∞
Jeśli zbiory Si∞ = ∞
m=1 Si , i = 1, ..., n, są niepuste, to określamy grę G ,
zwaną wynikiem ciągu eliminacyjnego (Gm )m , w której zbiorami strategii są
Si∞ , i = 1, ..., n zaś funkcje wypłaty są ograniczeniami ui .
Zauważmy, że w przypadku skończonej gry G gra G∞ jest zawsze określona.
Zwróćmy też uwagę, że G∞ zależy od ciągu eliminacyjnego w ogólnej sytuacji.
Poniżej (5.5) pokażemy, że przy pewnym założeniu maksymalności ciągu eliminacyjnego jego wynik zależy już tylko od wyjściowej gry G. Tymczasem
zanotować możemy
Wniosek. Jeśli G jest grą skończoną i G∞ wynikiem ciągu eliminacyjnego
∞ ).
e = Eq(G
g
gry G, to Eq(G)
Szczególnie łatwe są gry, w których eliminując strategie dominowane doprowadzić można do jednoelementowych zbiorów strategii - gry takie mają
jedyny punkt równowagi, który można znaleźć efektywnie i znaleźć argumentację skłaniającą graczy do używania tworzących go strategii (argumentacja:
nie użyję strategii dominowanych, bo to nieopłacalne; przeciwnik wie, że jestem racjonalny, wie zatem, że nie użyję więc strategii dominowanych ...). W
tej sytuacji mówimy, że gra jest rozwiązalna przez iterowaną eliminację
strategii dominowanych. 2 .
Przykład 1.
a
b
c
e 8,3 6,4 15,0
f 9,1 5,2 6,3
g 3,2 4,3 5,4
h 2,66 3,10 4,8
Kolejność eliminacji:
1. g (dominowana przez f)
2. h (dominowana przez f)
3. a (dominowana przez b)
4. f (dominowana przez e)
5. c (dominowana przez b)
Jedynym punktem równowagi jest (e,b).
Przykład 2.
2
Poszukiwanie punktów równowagi nazywa się niekiedy rozwiązywaniem gry.
3. GRY W POSTACI STRATEGICZNEJ
22
a
b
c
e 8,3 6,4 15,0
f 9,1 7,2 6,3
g 3,2 4,3 5,4
h 2,66 3,10 4,8
W tym przykładzie nie możemy wyeliminować f (krok 4.) Wynikiem ciągu
eliminacji jest gra opisaną przez tabelkę:
b
c
e 6,4 15,0
f 7,2 6,3
Ta gra nie ma punktów równowagi, jej mieszane rozszerzenie (a co za tym
idzie także mieszane rozszerzenie gry wyjściowej) ma jedyny punkt równowagi
9
1
( 15 b + 45 c, 10
e + 10
f ). Można znaleźć go metodą opisaną w 3.5.
Przykład 3. Rozważmy duopol, w którym dwie firmy wybierają poziom
produkcji z przedziału [0, 1]. Funkcja ceny p wyraża się wzorem p(q) = 2 − q,
gdzie q oznacza podaż. Koszt produkcji dla obu firm opisany jest przez tę samą
funkcję c(qi ) = qi .
Rozważamy zatem grę G = (S1 , S2 , u1 , u2 ), w której S1 = S2 = [0, 1] oraz
ui (q1 , q2 ) = (2 − q1 − q2 )qi − qi = (1 − q1 − q2 )qi .
Niech dane będą ciągi (an ), (bn ) określone rekurencyjnie a0 = 0, b0 = 1,
an+1 = (1 − bn )/2, bn+1 = (1 − an )/2. Można pokazać, że (an ) jest niemalejący,
(bn ) nierosnący oraz ich wspólna granica równa jest 13 .
Niech Gm = (S1m , S2m , u1 , u2), gdzie Sim = [am , bm ], i = 1, 2. Wtedy (Gm )m
jest ciągiem eliminacyjnym dla G oraz Si∞ = { 31 } dla i = 1, 2.
Stąd gra G ma jedyny punkt równowagi ( 31 , 13 ).
b) Rozważmy duopol, w którym firmy wybierają strategie ze zbioru [an , bn ],
oraz p(q) = 2 − q, c1 (q) = c2 (q) = q. Wykazać, że strategie ze zbioru [an , bn ] \
[an+1 , bn+1 ] są dominowane.
3.7 Eliminowanie strategii słabo dominowanych. Z punktu widzenia
„teoretycznego” eliminowanie strategii słabo dominowanych nie ma tak dobrych
własności jak opisane powyżej. Na przykład można „zgubić” punkt równowagi:
gra
3. GRY W POSTACI STRATEGICZNEJ
23
d
e
f
a 1,3 1,3 2,1
ma jedyny punkt równowagi (b, f ) ale strategia b jest
b 0,1 0,2 2,2
c 7,0 7,1 0,3
słabo dominowana przez a. (Zadanie: opisać punkty równowagi mieszanego
rozszerzenia tej gry).
Ponadto wynik iterowanej eliminacji strategii słabo dominowanych może
zależeć od kolejności eliminacji, nawet przy odpowiednim założeniu maksymalności ciągu eliminacyjnego. Na przykład w grze
L
R
U 3,1 2,0
M 4,0 1,1
D 4,4 2,4
można najpierw wyeliminować U (słabo dominowaną przez D), następnie L
(przez R) i wreszcie M (przez D). Zostaje jedna strategia dla każdego gracza:
D i R odpowiednio. Można jednak najpierw usunąć M (słabo dominowaną
przez D), następnie R i na końcu U. Zostają strategie D i L.
Jednak eliminacja strategii słabo dominowanej jest dobrze uzasadnioną
operacją gracza planującego ruch: z dwóch strategii, z których pierwsza przynosi w każdej sytuacji zysk nie mniejszy niż druga, a czasem nawet większy,
należy wybrać pierwszą.
Przykład. Paradoks przewodniczącego: trzyosobowe jury wybiera jedną z
trzech możliwości a,b,c w drodze głosowania. Wybrana zostaje możliwość, która otrzyma większość głosów. W przypadku, gdy każdy członek jury zagłosuje
na inną możliwość o wyborze decyduje przewodniczący - 3.
Indywidualne rankingi poszczególnych członków jury ilustruje tabelka.
1 2 3
a b c
b c a
c a b
Zatem gracz 1 najwyżej ceni a, najmniej c itd. Przyjmijmy, że zadowolenie
poszczególnych członków jury z werdyktu mierzymy liczbą równą 2 w wypadku,
gdy wybrana zostaje możliwość, którą dany członek jury ceni najwyżej, 1 - gdy
wybrana zostanie ta „średnia”, 0 - gdy najmniej ceniona.
Rozważmy zatem grę 3-osobową, w której każdy z graczy ma trzy strategie
a,b,c, zaś wypłaty ilustrują tabelki:
4. GRY KOOPERACYJNE
3:c
a
b
c
24
a
b
c
2,0,1 0,1,2 0,1,2
0,1,2 1,2,0 0,1,2
0,1,2 0,1,2 0,1,2
3:a
a
b
c
a 2,0,1 2,0,1 2,0,1
b 2,0,1 1,2,0 0,1,2
c 2,0,1 0,1,2 0,1,2
3:b
a
b
c
a 2,0,1 1,2,0 0,1,2
b 1,2,0 1,2,0 1,2,0
c 2,0,1 1,2,0 0,1,2
Można przeprowadzić eliminację strategii słabo dominowanych.
1. Gracz 1 eliminuje c (dominowaną słabo przez a).
2. Gracz 2 eliminuje a i c (dominowane słabo przez b).
3. Gracz 3 eliminuje a i b (dominowane słabo przez c).
4. Gracz 1 eliminuje a (dominowaną słabo przez b).
Każdemu graczowi zostanie jedyna strategia: b, ,b i c graczom 1,2, i 3 odpowiednio. Wynikiem gry będzie wtedy wybór b. Zauważmy, że efekt ten możemy
rozumieć tak, że gracze 1 i 2 zadziałali wspólnie przeciwko przewodniczącemu.
Trójka (b,b,c) jest punktem równowagi powyższej gry 3-osobowej.
4. Gry kooperacyjne w postaci funkcji charakterystycznej
4.1. Niech n będzie liczba naturalną. Przez N = {1, 2, . . . , n} oznaczamy zbiór
wszystkich graczy n-osobowej gry. Każdy niepusty podzbiór zbioru N (włącznie z samym zbiorem N) nazywamy koalicją.
Definicja. Grą n-osobową w postaci funkcji charakterystycznej nazywamy dowolną funkcję v : 2N → R taką, że v(∅) = 0 oraz spełniony jest
warunek
• jeśli C1 ∪ . . . ∪ Ck = N jest rozbiciem N na parami rozłączne zbiory, to
v(N) ≥ v(C1 ) + . . . + v(Ck ).
4. GRY KOOPERACYJNE
25
Genezę tego pojęcia wyjaśnimy w części 5.
W literaturze spotyka się często nieco inną definicję gry kooperacyjnej w
postaci funkcji charakterystycznej, mianowicie wymaga się by v była funkcją
superaddytywną, tzn. spełniała warunek
v(A ∪ B) ≥ v(A) + v(B)
dla dowolnych rozłącznych koalicji A,B.
Oczywiście superaddytywność wraz z warunkiem v(∅) = 0 implikuje warunek powyższej definicji.
Definicja. Imputacją (podziałem) w n-osobowej grze v nazywamy dowolny wektor x = (x1 , . . . , xn ) ∈ RN taki, że:
1. xi ≥ v({i}) dla wszystkich i ∈ N,
P
2.
xi = v(N).
i∈N
Imputację interpretować można jako podział „wspólnego dobra” v(N) pomiędzy graczy, satysfakcjonujący każdego z nich z osobna.
Zbiór imputacji gry v oznaczamy przez E(v).
P
Dla uproszczenia zapisu będziemy pisali x(A) =
xi , gdy x ∈ RN , A ⊂ N.
i∈A
Definicja. Niech x i y będą imputacjami, a A - koalicją. Mówimy, że x
dominuje y przez A (ozn. x ≻A y), gdy:
1. xi > yi dla wszystkich i ∈ A,
2. x(A) ≤ v(A).
Mówimy, że x dominuje y (x ≻ y), gdy x ≻A y dla pewnej koalicji A.
Niech x, y będą imputacjami. Gracze należący do koalicji A takiej, że x ≻A
y wybierając x zapewniają sobie zysk większy niż ten, który mogliby osiągnąć
wybierając y.
Definicja. Rdzeniem gry v nazywamy zbiór wszystkich imputacji niedominowanych.
Rdzeń gry v oznaczamy przez C(v).
4. GRY KOOPERACYJNE
26
Rdzeń rozumiemy jako zbiór możliwych podziałów, które nie mogą być
zakwestionowane przez żadną koalicję.
Gry kooperacyjne, które to rozważamy określa się również jako gry kooperacyjne z przekazywalnymi wypłatami (transferable payoff). Chodzi o to, że
wartości mogą być swobodnie przekazywane miedzy graczami, co może być
ważne dla utrzymania trwałości koalicji.
Twierdzenie. Załóżmy, że v jest grą kooperacyjną w postaci funkcji charakterystycznej, x ∈ RN . Wtedy x ∈ C(v) wtedy i tylko wtedy, gdy
(a) x(A) ≥ v(A) dla dowolnej A ⊆ N,
(b) x(N) = v(N).
Dowód. Załóżmy, że x spełnia warunki (a) i (b). Niech A = {i}. Z warunku
(a) wiemy, że xi ≥ v({i}), czyli wszystkie wektory spełniające (a) oraz (b) są
imputacjami.
Przypuśćmy, że istnieje y ∈ E(v), yi > xi dla dowolnych i ∈ A. Wtedy
X
yi > v(A).
i∈A
Zatem niemożliwe jest, by y ≻A x. Stąd x nie jest dominowana.
Przypuśćmy teraz, że y nie spełnia (a) lub (b). Jeśli nie spełnia (b) to nie
jest imputacją.
Przypuśćmy, że nie jest spełniony warunek (a). Wtedy istnieje pewien niepusty zbiór A ⊂ N taki, że
X
yi = v(A) − ε,
i∈A
gdzie ε > 0. Przyjmijmy
α = v(N) − v(A) −
X
v({i}).
i∈N \A
Wtedy α ≥ 0.
Niech a będzie liczbą elementów zbioru A. Zdefiniujmy wektor z ∈ RN
wzorem:
yi + aε ,
jeśli i ∈ A,
zi =
α
v({i}) + n−a , jeśli i ∈
/ A.
4. GRY KOOPERACYJNE
27
Widać, że z jest imputacją, ponadto z ≻A y. Wobec tego, y jest dominowana.
Przykład. Niech N = {1, 2, 3} oraz c ∈ [0, 1]. Przypuśćmy, że v(A) = 0 dla
koalicji jednoosobowych A, v(A) = c jeśli A ma dwa elementy oraz v(N) = 1.
Wtedy C(v) jest niepusty wtedy i tylko wtedy, gdy c ≤ 32 .
4.2. Przypomnijmy teraz inną, pochodzącą od von Neumanna i Morgensterna, koncepcję rozwiązywania gier kooperacyjnych - pojęcie zbioru stabilnego.
Definicja. Niech X ⊂ E(v). Zbiór X nazywamy stabilnym, o ile:
1. ∀x,y∈X x ⊁ y,
(wewnętrzna stabilność)
2. ∀z∈E(v)\X ∃x∈X x ≻ z.
(zewnętrzna stabilność)
Związek tego pojęcia z rdzeniem podaje następujący fakt.
Twierdzenie. Załóżmy, że v jest grą kooperacyjną w postaci funkcji charakterystycznej.
(a) C(v) jest podzbiorem każdego zbioru stabilnego.
(b) Jeśli C(v) jest zbiorem stabilnym, to jest jedynym zbiorem stabilnym.
Dowód. (a) Niech X będzie zbiorem stabilnym oraz niech y ∈ C(v). Przypuśćmy, że y ∈
/ X. Zatem istnieje z ∈ X takie, że z ≻ y. Otrzymujemy
sprzeczność, ponieważ y jest niedominowaną imputacją.
(b) Niech X będzie zbiorem stabilnym. Z (a) wiemy, że C(v) ⊂ X. Załóżmy,
że C(v) 6= X. Weźmy x ∈ X \ C(v). Wówczas istnieje y ∈ C(v) takie, że
y ≻ x, ponieważ C(v) jest zbiorem stabilnym. Mamy sprzeczność z wewnętrzną
stabilnością zbioru X, zatem C(v) jest jedynym zbiorem stabilnym.
4.3. Zmierzamy do podania pewnego kryterium na istnienie elementów
rdzenia.
Niech C oznacza zbiór wszystkich koalicji w N.
Dla A ⊂ N przez 1A ∈ RN oznaczamy wektor charakterystyczny zbioru A,
tzn.
1 i ∈ A,
(1A )i =
0 i∈
/ A.
4. GRY KOOPERACYJNE
28
Definicja. Układ (λA )A∈C ∈ [0, 1] jest zbalansowanym układem wag,
jeśli
X
λA 1 A = 1N .
A∈C
Definicja. Gra v jest zbalansowana, jeśli
P
λA v(A) ≤ v(N) dla każdego
A∈C
zbalansowanego układu wag.
Przypomnijmy, że zbiór D ⊂ RN nazywamy stożkiem wypukłym, o ile
∀x,y∈D ∀a,b≥0
ax + by ∈ D.
Niech C1 , C2 będą niepustymi podzbiorami w Rn . Mówimy, że hiperpłaszczyzna H oddziela C1 , C2 , jeśli C1 jest zawarty w jednej półprzestrzeni domkniętej
wyznaczonej przez H, a C2 leży w drugiej półprzestrzeni domkniętej wyznaczonej przez H.
Twierdzenie. (Bondareva – Shapley) Gra kooperacyjna v ma niepusty
rdzeń wtedy i tylko wtedy, gdy jest zbalansowana.
Dowód. „⇒” Niech v będzie grą koalicyjną oraz niech x ∈ C(v). Załóżmy,
że (λA )A∈C jest zbalansowanym zbiorem wag. Wtedy
X
X
X X
X
λA v(A) ≤
λA x(A) =
xi
λA =
xi = v(N).
A∈C
A∈C
i∈N
A∋i
i∈N
Zatem v jest zbalansowana.
„⇐” Załóżmy, że v jest zbalansowana. Wtedy nie ma zbalansowanego układu wag (λA )A∈C takiego, że:
X
λA v(A) > v(N).
A∈C
Niech
P = (1N , z) ∈ RN × R, z > v(N) .
Jest to zbiór wypukły.
Niech M będzie zbiorem wszystkich kombinacji liniowych wektorów (1A , v(A))
∈ RN ×R, A ⊂ N z nieujemnymi współczynnikami. Wówczas M jest wypukłym
stożkiem.
4. GRY KOOPERACYJNE
29
Wykażemy, że zbiory P i M są rozłączne.
Załóżmy, że (1N , v(N) + ǫ)) ∈ M. Wtedy istnieją nieujemne λA takie, że
X
λA (1A , v(A)) = (1N , v(N) + ǫ)
A∈C
co prowadzi do sprzeczności z założeniem, że v jest zbalansowana.
Na podstawie odpowiedniego twierdzenia o oddzielaniu zbiorów wypukłych,
rozdzielając zbiory P i M hiperpłaszczyzną, stwierdzamy, że istnieje niezerowy
wektor (αN , α) ∈ RN × R taki, że:
(∗)
(αN , α) · y ≥ 0 > (αN , α) · (1N , v(N) + ǫ)
dla każdego y ∈ M i ǫ > 0, gdzie · : RN × RN → R jest standardowym
iloczynem skalarnym w RN × R.
Przypuśćmy, że α = 0. Wtedy αN · 1N < 0. Ponadto, (1N , v(N)) ∈ M, zatem
αN · 1N + α · v(N) ≥ 0
Otrzymujemy sprzeczność z (∗).
Zatem α 6= 0. Wtedy α < 0, ponieważ
∀ǫ>0 αN · 1N + α · (v(N) + ǫ) < 0
Wskażemy teraz element rdzenia gry v.
N
Niech x = α−α
. Dla dowolnego A ⊂ N, korzystając z lewej strony nierówności (∗) mamy:
(αN , α) · (1A , v(A)) ≥ 0.
Następujące nierówności są równoważne:
αN · 1A + α · v(A)
αN
· 1A − v(A)
−α
αN
· 1A
−α
x(A) = x · 1A
≥
≥
≥
≥
0,
0,
v(A),
v(A).
Ponadto, korzystając z prawej strony nierówności (∗), dla dowolnego ǫ > 0,
otrzymujemy:
(αN , α) · (1N , v(N) + ǫ) < 0,
αN · 1N + α · (v(N) + ǫ) < 0,
αN
· 1N − v(N) − ǫ < 0,
−α
αN
· 1N < v(N) + ǫ,
−α
x(N) = x · 1N < v(N) + ǫ.
4. GRY KOOPERACYJNE
30
Stąd x(N) = v(N).
Wśród gier w postaci funkcji charakterystycznej możemy wyróżnić gry wypukłe.
Definicja. Gra v jest wypukła, jeśli
v(A) + v(B) ≤ v(A ∪ B) + v(A ∩ B)
dla wszystkich A, B ⊂ N.
Zauważmy, że gra wypukła spełnia warunek superaddytywności (4.1).
Dowód poniższego zadania potraktujmy jako zadanie.
Twierdzenie. Jeśli gra v jest wypukła, to ma niepusty rdzeń.
4.4. Pojęcia gry kooperacyjnej w postaci funkcji charakterystycznej można
użyć m.in. do modelowania rynku z przekazywalnymi wypłatami.
Rynek z przekazywalnymi wypłatami jest to układ
M = (N, l, (ωi )i∈N , (fi )i∈N ),
gdzie:
• N jest skończonym zbiorem zwanym zbiorem graczy. Często przyjmujemy N = {1, ..., n}.
• l jest liczbą naturalną - liczbą „dóbr”.
• ωi ∈ Rl+ - wektor opisujący „wyposażenie„ gracza i w poszczególne dobra.
• fi : Rl+ → R - funkcja „produkcji”, wartość fi (z) interpretujemy jako dochód, który może osiągnąć gracz i przy założeniu, że wyposażenie gracza
i opisane jest przez wektor z. Zakładamy, że fi są ciągłe, wklęsłe i niemalejące ze względu na naturalny częściowy porządek zdefiniowany w Rl+
„po współrzędnych”.
Przypuśćmy, że zawiązuje się koalicja S ⊆ N. W obrębie S gracze wymieniają się posiadanymi dobrami tak by osiągnąć w sumie maksymalny dochód.
Formalizując tę ideę definiujemy
X
X
X
vM (S) = max {
fi (zi ) : zi ∈ Rl+ ,
zi =
ωi}.
(zi )i∈S
i∈S
i∈S
i∈S
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
31
W ten sposób zdefiniowaliśmy grę w postaci funkcji charakterystycznej stowarzyszoną z rynkiem M.
Używając twierdzenia Bonderevey-Shapleya można wykazać, że ta gra ma
niepusty rdzeń.
5. Gry dwuosobowe o sumie zerowej, gry macierzowe
5.1. Mówimy, że gra G = (S1 , ..., Sn , u1 , ..., un ) jest grą o sumie zero, gdy
u1 + ... + un jest funkcja stałą równą zeru. Jeśli G = (S1 , S2 , u1 , u2 ) jest taką
grą, to u2 = −u1 i zapisujemy G jako G = (S1 , S2 , u1 ).
Szczególnie łatwą do badania klasę gier tworzą skończone gry dwuosobowe
o sumie zero, zwane też grami macierzowymi. Dla danej macierzy A rozmiaru
m × n o współczynnikach rzeczywistych definiujemy grę dwuosobową o sumie
zero
g(A) = (S1 , S2 , u1),
gdzie S1 = {1, ..., m}, S2 = {1, ..., n} oraz u1 (i, j) = Aij .
Grę tę możemy interpretować następująco: gracz 1 wybiera wiersz, gracz 2
kolumnę macierzy A, następnie gracz 2 „płaci” pierwszemu kwotę zapisaną w
miejscu (i, j) macierzy A.
Łatwo zauważyć, że dowolna skończona, dwuosobowa o sumie zero jest
izomorficzna z grą g(A) dla pewnej macierzy A, co usprawiedliwia nazwę „gry
macierzowe”.
Wartością dolną (odp. górną) gry G = (S1 , S2 , u) nazywamy wartość
sup inf u(s1 , s2 )
s1 ∈S1 s2 ∈S2
(odp.
inf sup u(s1, s2 ).)
s2 ∈S2 s1 ∈S1
Oznaczamy te wartości odpowiednio v(G) i v(G). Jeśli są one równe, to ich
wspólną wartość nazywamy wartością gry i oznaczamy v(G).
Uwaga. Łatwo wykazać, że zawsze zachodzi nierówność v(G) ≤ v(G).
Strategią optymalną gracza 1 nazywamy s∗1 ∈ S1 taką, że
inf u(s∗1, s2 ) = max inf u(s1, s2 ).
s2 ∈S2
s1 ∈S1 s2 ∈S2
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
32
Strategią optymalną gracza 2 nazywamy s∗2 ∈ S2 taką, że
sup u(s1, s∗2 ) = min sup u(s1, s2 ).
s2 ∈S2 s1 ∈S1
s1 ∈S1
Strategie optymalne gracza 1 (odp. 2) nazywamy strategiami maksyminimalnymi (odp. minimaksymalnymi).
Pojęcia te zilustrujemy na prostych przykładach.
Przykład 1. Niech
1 0 −1
A = 2 3 1 .
0 1 0
Strategiami optymalnymi graczy 1 i 2 w grze g(A) są odpowiednio 2 i 3. Wartość dolna równa jest wartości górnej i wynosi 1. Zauważmy, że strategie optymalne tworzą w tym przypadku punkt równowagi gry.
W przypadku gier macierzowych zawsze istnieją strategie optymalne, ale
nie zawsze istnieje wartość.
Przykład 2. Niech
A=
1 2
3 0
.
Strategiami optymalnymi graczy 1 i 2 są 1 i 2 odpowiednio. Nie tworzą one
jednak punktu równowagi. Związane jest to, jak zobaczymy poniżej, z faktem,
że gra g(A) nie ma wartości: jej wartość dolna wynosi 1, zaś górna 2.
By dostrzec różnicę między tymi przykładami zauważmy przede wszystkim,
że strategie optymalne są strategiami najostrożniejszymi, minimalizującymi ryzyko. Każdy z graczy może więc domniemywać, że przeciwnik wybierze właśnie
strategię optymalną. Ale o ile w przykładzie 1 przypuszczenie takie utwierdza
jego samego w zamiarze użycia strategii optymalnej (równowaga), o tyle w
przykładzie 2 tak nie jest: gracz 2 może próbować przechytrzyć przeciwnika,
(spodziewając się, że ten wybierze strategię 1) i wybierze swoją strategię 1.
Twierdzenie. Załóżmy, że G = (S1 , S2 , u) jest dwuosobową grą o sumie
zero.
(1) Przypuśćmy, że G ma wartość v oraz s∗1 ∈ S1 , s∗2 ∈ S2 są strategiami
optymalnymi graczy 1 i 2 odpowiednio. Wtedy (s∗1 , s∗2 ) jest punktem równowagi
gry G oraz u(s∗1 , s∗2 ) = v.
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
33
(2) Przypuśćmy, że strategie s∗1 ∈ S1 , s∗2 ∈ S2 spełniają warunek
inf u(s∗1 , s2 ) ≥ sup u(s1 , s∗2 ).
s2 ∈S2
s1 ∈S1
Wtedy s∗1 , s∗2 są strategiami optymalnymi graczy 1 i 2 odpowiednio.
(3) Załóżmy, że gra G posiada punkt równowagi (s∗1 , s∗2 ). Wtedy G posiada
wartość oraz s∗1 , s∗2 są strategiami optymalnymi graczy 1 i 2 odpowiednio.
Dowód. (1) Z naszych założeń wynika, że
inf u(s∗1, s2 ) = max inf u(s1, s2 ) = min sup u(s1 , s2 ) = sup u(s1 , s∗2 ) = v.
s2 ∈S2
s1 ∈S1 s2 ∈S2
s2 ∈S2 s1 ∈S1
s1 ∈S1
Stąd
u(s1 , s∗2 ) ≤ sup u(s1, s∗2 ) = inf u(s∗1 , s2 ) ≤ u(s∗1 , s2 )
s1 ∈S1
s2 ∈S2
dla dowolnych s1 ∈ S1 , s2 ∈ S2 . Wynikają stąd nierówności
u(s1 , s∗2 ) ≤ u(s∗1 , s∗2 ) ≤ u(s∗1 , s2 )
oraz równość u(s∗1, s∗2 ) = v, co kończy dowód (1).
(2) Zauważmy, że w tej sytuacji
v(G) = sup inf u(s1 , s2 ) ≥ inf
s1 ∈S1 s2 ∈S2
sup u(s1, s2 ) = v(G)
s2 ∈S2 s1 ∈S1
co wobec faktu, że v(G) ≤ v(G) oznacza, że powyższe nierówności są równościami. W szczególności wartość gry G istnieje.
Ponadto
inf u(s∗1, s2 ) = max inf u(s1, s2 ),
s2 ∈S2
s1 ∈S1 s2 ∈S2
zatem s∗1 jest strategią maksyminimalną. Podobnie wykazać można, że s∗2 jest
strategią minimaksymalną.
(3) Wiemy, że
u(s1 , s∗2 ) ≤ u(s∗1 , s∗2 ) ≤ u(s∗1 , s2 )
dla dowolnych s1 ∈ S1 , s2 ∈ S2 . Stąd
sup u(s1 , s∗2 ) ≤ u(s∗1, s∗2 ) ≤ inf u(s∗1 , s2 ).
s1 ∈S1
Teza wynika z punktu (2).
s2 ∈S2
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
34
Wniosek. Jeśli G jest grą dwuosobową o sumie zero i (s1 , s2 ) oraz (t1 , t2 )
są jej punktami równowagi, to także (t1 , s2 ) i (s1 , t2 ) są punktami równowagi.
Zauważmy, że nie jest tak bez założenia, że gra jest grą o sumie zero:
przykładem może być gra BoS.
5.2. Przypomnijmy, że dla liczby naturalnej k przez ∆k oznaczamy zbiór
{(x1 , ..., xk ) ∈ Rk : xi ≥ 0, i = 1, ..., k, x1 + ... + xk = 1}.
Z macierzą A rozmiaru m × n stowarzyszyliśmy grę skończoną g(A). Nietrudno zauważyć, że jej mieszane rozszerzenie jest izomorficzne z grą
G(A) = (∆m , ∆n , ξA ),
gdzie ξA jest funkcjonałem dwuliniowym o macierzy A ograniczonym do ∆m ×
∆n , tzn.
ξA (x, y) = xAy tr
dla x ∈ ∆m , y ∈ ∆n . Stosujemy zapis macierzowy, elementy
jako wektory - wiersze.
Inaczej można zapisać
ξA (x, y) =
m X
n
X
Rk
traktujemy
xi yj Aij .
i=1 j=1
Twierdzenie. (J. von Neumann) Dla dowolnej macierzy A gra G(A) ma
strategie optymalne i wartość.
Twierdzenie to jest oczywiście konsekwencją twierdzenia Nasha. W części
5.4 przedstawimy inny dowód oparty na teorii programowania liniowego.
Uwaga. Historycznie koncepcje związane z grami macierzowymi poprzedzały ideę rozwiązywania gry n-osobowej przy pomocy koncepcji Nasha. John
von Neumann proponował, by grę skończoną G = (S1 , ..., Sn , u1 , ..., un ) analizować w następujący sposób. Ustalmy niepustą koalicję A 6= N i rozważmy
dwuosobową grę o sumie zerowej „A kontra reszta świata”. Graczami są koalicja
A i koalicja B = N \ A. Niech
Y
Y
SA =
Si , SB =
Si .
i∈A
i∈B
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
35
P
Niech GA = (SA , SB , uA ), gdzie uA = i∈A ui . Przez vG (A) oznaczmy wartość mieszanego rozszerzenia gry GA . Można udowodnić, że vG jest funkcją
superaddytywną.
5.3. Przez ei oznaczać będziemy wektor bazy standardowej przestrzeni euklidesowej mający 1 na współrzędnej i i zera poza nią.
Lemat. (1)
inf y∈∆n ξA (x, y) = minj=1,...,n ξA (x, ej ), supx∈∆m ξA (x, y) = maxi=1,...,m ξA (ei , y).
(2) Obaj gracze mają strategie optymalne w grze G(A).
wystarczy zauważyć, że ξA (x, y) =
P Dowód. Dla dowodu części pierwszej P
j=1,...,n yj ξA (x, ej ), yj są nieujemne oraz
j=1,...,n yj = 1. Stąd
X
ξA (x, y) ≥
yj ( min ξA (x, ej )) = min ξA (x, ej ).
j=1,...,n
j=1,...,n
j=1,...,n
Nierówność minj=1,...,n ξA (x, ej ) ≥ inf y∈∆n ξA (x, y) wynika z faktu, że ej ∈ ∆n ,
pierwsza równość w (1) jest więc udowodniona. Drugą wykazujemy podobnie.
(2) Funkcja x 7→ inf y∈∆n ξA (x, y) równa jest maksimum skończenie wielu
funkcji ciągłych na podstawie (1), jest więc ciągła. Ponieważ zbiór ∆m jest
zwarty, osiąga na nim ona maksimum. Gracz 1 ma więc strategię optymalną.
Podobnie pokazujemy istnienie strategii optymalnej gracza 2.
Wprowadźmy następujące oznaczenia: 0m i 1m oznaczać będą wektory w
R których wszystkie współrzędne równe są 0 i 1, odpowiednio. Jeśli A i B są
macierzami tego samego rozmiaru, to A ≤ B oznaczać będzie, że Aij ≤ Bij
dla wszystkich i, j. Ponadto zapis np. A > 0 rozumiemy jako: Aij > 0 dla
wszystkich i, j. Dla wektora x przez min x oznaczamy minimum współrzędnych
x.
m
Lemat. Załóżmy, że A > 0.
(1) Funkcja x 7→ P mx xi wyznacza bijekcję pomiędzy zbiorem rozwiązań
i=1
optymalnych programu liniowego
1m xtr → min
Atr xtr ≥ 1tr
n
x ≥ 0m
a zbiorem strategii optymalnych gracza 1 w grze G(A). Przyporządkowanie odwrotne zadane jest wzorem p 7→ min Aptr ptr .
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
36
(2) Funkcja y 7→ P ny yj wyznacza bijekcję pomiędzy zbiorem rozwiązań
j=1
optymalnych programu liniowego
1n y tr → max
Ay tr ≤ 1tr
m
y ≥ 0n
a zbiorem strategii optymalnych gracza 2 w grze G(A). Przyporządkowanie odwrotne zadane jest wzorem q 7→ maxqAqtr .
Dowód. Wystarczy udowodnić punkt (1), drugi jest analogiczny.
Niech x będzie rozwiązaniem programu liniowego z punktu (1) i niech x′ ∈
∆m . Oznaczmy
µ = min ξA (x′ , ej ) = min Atr x′tr ,
j
jest to liczba dodatnia. Wtedy wektor x = x′ /µ spełnia nierówność Atr xtr ≥ 1tr
m
i ma nieujemne współrzędne. Stąd
tr tr
x1tr
m ≤ x 1m =
czyli
1
,
µ
x
Atr ( P )tr ≥ µ.
i xi
Oznacza to, że
x
min(ξA ( P , ej )) ≥ min(x′ , ej ))
j
j
i xi
czyli Px xi jest strategią optymalną gracza 1.
i
Niech teraz p ∈ ∆m będzie strategią optymalną gracza 1 oraz niech z ∈
Rm ma nieujemne współrzędne i spełnia nierówność Atr z tr ≥ 1tr
n . Wtedy nie
wszystkie współrzędne wektora z równe są zero i Pz zi ∈ ∆m . Ponieważ p jest
i
strategią optymalną, spełniona jest nierówność
z
min Atr ptr = min ξA (p, ej ) ≥ min ξA ( P
j
Oznaczając x =
j
p
min Atr ptr
x1tr
m =
X
i
i zi
1
, ej ) = P
1
min Atr z tr ≥ P .
i zi
i zi
otrzymujemy nierówności Atr xtr ≥ 1tr
n oraz
X
p
1
=
≤
zi = z1tr
m,
min Atr ptr
min Atr ptr
i
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
czyli x jest wektorem optymalnym dla programu linowego w punkcie (1).
37
Wniosek. Można znaleźć strategie optymalne w grze G(A) przy pomocy
algorytmów programowania linowego, np. SYMPLEKS.
5.4. Twierdzenie von Neumanna okaże się konsekwencją znanego w teorii
programowania linowego twierdzenia o dualności.
Przypomnijmy, że programy liniowe
Cxtr → min
Atr xtr ≥ B tr
LP :
x ≥ 0m
i
By tr → max
∗
Ay tr ≤ C tr
LP :
y ≥ 0n ,
gdzie A jest macierzą o m wierszach i n kolumnach, C ∈ Rm , B ∈ Rn , nazywamy dualnymi.
Twierdzenie. Przypuśćmy, że istnieją wektory dopuszczalne dla problemów LP i LP ∗ , tzn. wektory x ∈ Rm , y ∈ Rn o nieujemnych współrzędnych,
spełniające nierówności: Atr xtr ≥ B i Ay tr ≤ C.
Wtedy istnieją optymalne wektory dopuszczalne x∗ y ∗ dla problemów LP i
LP ∗ odpowiednio. Ponadto wtedy
C(x∗ )tr = B(y ∗ )tr .
Uwaga. Rozważmy funkcję liniową φ(t) = at + b, gdzie a > 0. Niech A
będzie macierzą o współczynnikach Aij oraz niech odpowiednie współczynniki A′ równe będą φ(Aij ). Łatwo zauważyć, że strategie optymalne graczy
w grach G(A) i G(A′ ) są takie same. Ponadto φ(v(G(A))) = v(G(A′ )) oraz
φ(v(G(A))) = v(G(A′ )). Wynika stąd, że gra G(A) ma wartość wtedy i tylko
wtedy gdy G(A′ ) ma wartość.
Dowód twierdzenia von Neumanna. Na podstawie powyższej uwagi
możemy bez utraty ogólności zakładać, że wszystkie współczynniki macierzy
A są dodatnie.
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
38
Rozważmy ponownie programy liniowe
1m xtr → min
Atr xtr ≥ 1tr
LP :
n
x ≥ 0m
i
1n y tr → max
Ay tr ≤ 1tr
LP ∗ :
m
y ≥ 0n
Na podstawie poprzednich lematów dla obu tych programów liniowych istnieją wektory dopuszczalne (odpowiadające strategiom optymalnym); można
też łatwo udowodnić to bezpośrednio.
Z twierdzenia o dualności wynika, że istnieją optymalne wektory dopuszczalne x∗ , y ∗ dla tych programów liniowych takie, że
1m (x∗ )tr = 1n (y ∗)tr .
Niech a oznacza tę wspólną wartość, zauważmy że jest to po prostu suma
współrzędnych wektora x∗ (a także y ∗ ).
Wtedy
a = 1m (x∗ )tr ≥ (A(y ∗ )tr )tr (x∗ )tr = y ∗ (Atr (x∗ )tr ) ≥ y ∗ 1tr
n = a.
Stąd a = x∗ A(y ∗ )tr . Określmy p∗ = a1 x∗ , q ∗ = a1 y ∗. Są to strategie optymalne na podstawie Lematu w części 5.3. Wtedy p∗ ∈ ∆m , q ∗ ∈ ∆n oraz
p∗ A(q ∗ )tr = ξA (p∗ , q ∗ ) = a1 . Ponieważ p∗ A ≥ a1 1m zatem dla dowolnej q ∈ ∆n
zachodzi nierówność
1
1
p∗ Aq tr ≥ 1m q tr = = p∗ A(q ∗ )tr .
a
a
Podobnie pokazuje się, że pA(q ∗ )tr ≤ p∗ A(q ∗ )tr dla dowolnej p ∈ ∆m .
5.5. Dla x ∈ Rk przez supp(x) oznaczmy nośnik wektora x, tzn. zbiór
{i = 1, ..., k : xi 6= 0}.
Twierdzenie. Niech p∗ ∈ ∆m , q ∗ ∈ ∆n oraz v = v(G(A)).
(1) p∗ jest strategią optymalną gracza 1 wtedy i tylko wtedy, gdy ξ(p∗ , ej ) ≥ v
dla każdego j = 1, ..., n.
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
39
(2) q ∗ jest strategią optymalną gracza 2 wtedy i tylko wtedy, gdy ξ(ei , q ∗ ) ≤ v
dla każdego i = 1, ..., m.
(3) Jeśli p∗ i q ∗ są strategiami optymalnymi oraz i ∈ supp(p∗ ), j ∈ supp(q ∗ ),
to
ξA (ei , q ∗ ) = ξA (p∗ , ej ) = v.
Dowód. (1) p∗ jest strategią maksyminimalną (= optymalną dla gracza 1)
wtedy i tylko wtedy, gdy
min ξA (p∗ , y) = max min ξA (p, y) = v,
y∈∆n
p∈∆m y∈∆n
czyli gdy ξA (p∗ , y) ≥ v dla każdego y ∈ ∆n . Ponieważ ∆n jest powłoką wypukłą
zbioru {e1 , ..., en } warunek ten równoważny jest temu, że ξA (p∗ , ej ) ≥ v dla
każdego j = 1, ..., n.
(2) dowodzimy analogicznie.
(3) Wykorzystamy fakt, że (p∗ , q ∗ ) jest punktem równowagi G(A). Zatem
dla dowolnych x ∈ ∆m , y ∈ ∆n zachodzą nierówności
ξA (p∗ , y) ≥ ξA (p∗ , q ∗) ≥ ξA (x, q ∗ ).
Zauważmy, że ξA (p∗ , ej ) = v dla pewnego j. W przeciwnym bowiem wypadku,
gdyby ξA (p∗ , ej ) > v dla wszystkich j, otrzymalibyśmy nierówność ξA (p∗ , q ∗ ) >
v, co prowadzi do sprzeczności.
Załóżmy teraz, że ξA (p∗ , el ) > v dla pewnego l ∈ supp(q ∗), t.j. ql∗ > 0.
Niech
q ′ = q ∗ − ql∗ el + ql∗ ej ∈ ∆n .
Wtedy
ξA (p∗ , q ′ ) = ξA (p∗ , q ∗ ) − ql∗ (ξA (p∗ , el ) − ξA (p∗ , ej )) < v = ξA (p∗ , q ∗ ),
sprzeczność.
Podobnie dowodzimy, że ξA (ei , q ∗ ) = v dla wszystkich i ∈ supp(p∗ ).
Następujący prosty wniosek często przydaje się w praktyce do poszukiwania strategii optymalnych, przynajmniej w przykładach macierzy o niedużych
rozmiarach.
Wniosek. Jeśli p∗ i q ∗ są strategiami optymalnymi oraz i, i′ ∈ supp(p∗ ),
j, j ′ ∈ supp(q ∗), to
ξA (ei , q ∗ ) = ξA (ei′ , q ∗ ) = ξA (p∗ , ej ) = ξA (p∗ , ej ′ ).
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
40
Pewien związek pomiędzy grami g(A) i G(A) podaje następujące twierdzenie.
Twierdzenie. Dla dowolnej macierzy A:
(1) v(g(A)) ≤ v(G(A)) ≤ v(g(A)).
(2) Przypuśćmy, że g(A) ma wartość v. Niech i0 , j0 będą strategiami optymalnymi graczy 1 i 2 odpowiednio, w grze g(A). Wtedy ei0 i ej0 są strategiami
optymalnymi gracza 1 i 2, odpowiednio, w grze G(A).
(3) Jeśli gra G(A) ma strategie optymalne ei i ej graczy 1 i 2 odpowiednio,
to i, j są strategiami optymalnymi w grze g(A) i gra ta ma wartość.
Dowód. (1)
v(g(A)) = max min ξA (ei , ej ) = max min ξA (ei , y) ≤ max min ξA (x, y)
i
j
i
y∈∆n
x∈∆m y∈∆n
= v(G(A)).
Podobnie dowodzi się drugą nierówność.
(2) Fakt, że (i0 , j0 ) jest punktem równowagi g(A) oznacza, że
ξA (ei0 , ej ) ≥ ξA (ei0 , ej0 ) ≥ ξA (ei , ej0 )
P
P
dla dowolnych i = 1, ..., m, j = 1, ..., n. Niech x = i xi ei ∈ ∆m , y = j yj ej
∈ ∆n . Łatwo zauważyć, że
ξA (ei0 , y) ≥ ξA (ei0 , ej0 ) ≥ ξA (x, ej0 ),
zatem (ei0 , ej0 ) jest punktem równowagi gry G(A).
Punkt (3) jest oczywisty.
Na ogół traktuje się zbiory strategii w g(A) jako podzbiory zbiorów strategii
w G(A) utożsamiając i a ei ∈ ∆. Strategie i = ei nazywamy czystymi, zaś
strategie w G(A) - mieszanymi.
Powyższe twierdzenia dostarczają metody znajdowania strategii optymalnych i wartości w grach macierzowych.
1 3
. Wartości górna i dolna gry g(A) wynoszą
Przykład 1. Niech A =
5 0
odpowiednio 3 i 1. Niech x i y będą strategiami optymalnymi graczy 1 i 2 w
grze G(A).
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
41
Zauważmy najpierw, że strategia y nie jest czysta. W przeciwnym wypadku
równa byłaby e1 lub e2 . Wtedy x jako najlepsza odpowiedź na y, równa byłaby
e2 lub e1 , odpowiednio. To jednak nie jest możliwe - gra g(A) nie ma wartości,
nie ma więc punktu równowagi, czyli G(A) nie ma punktu równowagi złożonego
ze strategii czystych.
Stąd supp(y) = {1, 2}. Z powyższego wniosku:
ξA (x, e1 ) = ξA (x, e2 ),
zatem
xAetr
1
= [x1 , x2 ]
1 3
5 0
1
0
= [x1 , x2 ]
1 3
5 0
0
1
= xAetr
2 .
Rozwiązując układ równań
x1 + 5x2 = 3x1 ; x1 + x2 = 1
otrzymujemy x1 = 75 , x2 = 27 .
Zatem supp(x) = {1, 2}. Rozumując analogicznie otrzymujemy y1 = 73 ,
y2 = 74 .
Pozostaje sprawdzić, czy x = [ 75 , 27 ], y = [ 73 , 74 ] są strategiami optymalnymi
w G(A). Można to zrobić bezpośrednio; w tym przykładzie wynika to również
z jednoznaczności otrzymanego wyniku.
Metoda ta jest nieefektywna w przypadku macierzy większego rozmiaru:
jest wiele możliwych kandydatów na nośniki strategii optymalnych.
Przykład 2. Niech
0
1 −1
1 .
A = −1 0
1 −1 0
Znajdziemy strategię optymalną gracza 1 metodą programowania liniowego.
Nasza macierz ma niedodatnie współczynniki, rozważmy więc
2 3 1
A′ = 1 2 3 .
3 1 2
5. GRY DWUOSOBOWE O SUMIE ZEROWEJ
42
Odpowiedzni program liniowy ma postać:
x1 + x2 + x3 → min,
2x1 + x2 + 3x3 ≥ 1,
3x1 + 2x2 + x3 ≥ 1,
x1 + 3x2 + 2x3 ≥ 1,
x1 , x2 , x3 ≥ 0.
Po dodaniu nierówności stronami widzimy, że dla każdego wektora dopuszczalnego: x1 + x2 + x3 ≥ 21 . Wartość ta jest osiągana przez x = ( 16 , 61 , 61 ). Normując
ten wektor otrzymujemy strategię optymalną ( 31 , 31 , 13 ) gracza 1.
6. ZADANIA I PROBLEMY
43
6. Zadania i problemy
Do rozdziału 2 - gry w postacie ekstensywnej
1. Dla jakich wartości n gracz 1 posiada strategię zwycięską w grze NIM(n)?
W następujących przykładach gra polegać będzie na zjadaniu czekolady
według pewnych zasad. Tabliczka czekolady jest to prostokąt podzielony w
wiadomy sposób na na m rzędów poziomych i n rzędów pionowych. Przegrywać
zawsze będzie ten z graczy, który zje kawałek w lewym górnym rogu tabliczki.
W wersji odłamywanie pasków graczowi wolno w kolejnym ruchu odłamać
poziomy (od dołu) lub pionowy (od prawej) pasek (pasek może składać się
z jednego, dwóch lub więcej rzędów, byle był niepusty!). Na każdym etapie
pozostający kawałek czekolady musi mieć kształt prostokąta.
W wersji odłamywanie naroża odłamywać wolno narożny kawałek od
prawego dolnego rogu. Pasek w powyższym znaczeniu też jest narożnym kawałkiem. Na każdym etapie pozostający kawałek czekolady musi mieć kształt
litery Γ (lub prostokąta).
2. Rozważmy grę „tabliczka czekolady” w wersji „odłamywanie pasków”.
(i) Podać formalny opis tej gry.
(ii) Który z graczy posiada strategię zwycięską, w zależności od rozmiarów
tabliczki? Opisać tę strategię.
3. Rozważmy grę "tabliczka czekolady" w wersji "odłamywanie naroża".
Który gracz posiada strategię zwycięską?
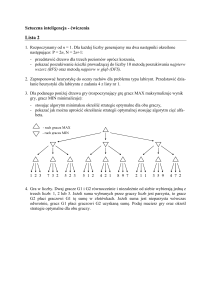
4. Sieć handlowa "Gerald" ma oddziały w K miastach ponumerowanych
1,...,K, w każdym z nich znajduje się jedno konkurencyjne przedsiębiorstwo gracz k. Potencjalny konkurent decyduje czy podjąć rywalizację z „Geraldem”
(T ) czy nie (N), dzieje się to kolejno w miastach od 1 do K. W pierwszym
przypadku „Gerald” decyduje czy będzie współpracował z konkurentem (C)
czy go zwalczał (F ). W mieście k pary wypłat uzyskiwanych przez „G” i k w
zależności od ich zachowań są następujące:
• (5, 1) jeśli k wybrał N,
• (0, 0) w przypadku T , F ,
6. ZADANIA I PROBLEMY
44
• (2, 2) w przypadku T , C.
Wypłata „Geralda” jest sumą wypłat osiągniętych w poszczególnych miastach.
Przedstawić tę sytuację jako grę w postaci ekstensywnej, przeanalizować
punkty (pełnej) równowagi dla różnych wartości K, przeprowadzić dyskusję
uzyskanych wyników. [9]
5. Udowodnić punkt (1) Twierdzenia Rubinsteina 2.6.
Do rozdziału 3 - gry w postaci strategicznej
6. Znaleźć punkty równowagi gry G = (S1 , S2 , u1 , u2), gdzie S1 = S2 =
[0, 1] oraz u1 , u2 dane są wzorami:
(i) u1 (x, y) = x(y + 3) − 2x2 , u2 (x, y) = (x + 1)y − y 2,
(ii) u1 (x, y) = x(1 + y) − x2 , u2 (x, y) = (2 + x)y − 2y 2,
(iii) u1 (x, y) = x(1 + y) − x3 , u2 (x, y) = 2xy − y 2.
7. Wykazać, że gra G (j.w.) nie posiada punktu równowagi, gdy
(i) u1 (x, y) = |x − y| = −u2 (x, y),
(ii) u1 = −u2 oraz
x − (1 − x)y, x < y
u1(x, y) =
0,
x = y,
(1 − y)x − y, x > y.
8. Rozważmy n graczy ponumerowanych liczbami ze zbioru {1, 2, . . . , n}
biorących udział w aukcji. Wartość przedmiotu aukcji dla i-tego gracza wynosi
vi , przy czym zakładamy, że v1 > v2 > . . . > vn . Gracze równocześnie oferują
cenę zakupu, a przedmiot otrzymuje ten z graczy, który zaoferował najwyższą
cenę; ewentualnie gracz o najniższym indeksie spośród tych którzy zaoferowali
najwyższą cenę. Powyższą aukcję nazywamy aukcją pierwszej ceny, jeśli
zapłata zwycięzcy jest zadeklarowaną przez niego kwotą podczas aukcji.
Opisać aukcję pierwszej ceny w terminach gry w postaci strategicznej oraz
znaleźć jej punkty równowagi. [9]
6. ZADANIA I PROBLEMY
45
9. Aukcję z poprzedniego zadania nazywamy aukcją drugiej ceny, jeśli
zapłata zwycięzcy jest najwyższą ceną zadeklarowaną przez jednego z graczy
przegranych.
Pokazać, że w aukcji tej oferowanie ceny vi przez gracza i jest strategią słabo dominującą każdą inną, to znaczy oferując vi gracz i-ty otrzymuje wypłatę niemniejszą niż wypłata, którą otrzymałby deklarując dowolna inną cenę,
niezależnie od działań pozostałych graczy. Pokazać, że pomimo tego istnieją
punkty równowagi, w których zwycięzca nie jest graczem nr 1. [9]
10. Dwóch graczy prowadzi dyskusję na temat pewnego przedmiotu. Wartość tego przedmiotu dla i-tego gracza wynosi vi > 0. Czas jest reprezentowany
jako ciągła zmienna przebiegająca przedział [0, ∞). Każdy z graczy wybiera
chwilę w której odda ów przedmiot drugiemu graczowi. Jeśli pierwszy gracz
przyzna przedmiot w czasie t, to drugi otrzyma go w tym czasie. Jeśli obaj
gracze przyznają przedmiot jednocześnie, to rozdzielamy go równo pomiędzy
nimi, a gracz i-ty otrzymuje wypłatę w wysokości v2i . Czas dla każdego z graczy
jest cenny bowiem zakładamy, że do momentu pierwszej zgody każdy z graczy
traci jedną jednostkę wypłaty w czasie określonej jednostki czasu.
Sformułować powyższą sytuację w terminach gry w postaci strategicznej oraz
pokazać, że we wszystkich punktach równowagi jeden z graczy natychmiast
przyznaje przedmiot drugiemu graczowi. [9]
11. Znaleźć punkty równowagi gier g(A, B) i G(A, B), jeśli
(i)
A=
3 1
4 0
A=
2 0
0 1
A=
3 0
4 1
A=
3 1
4 0
(ii)
(iii)
(iv)
, B=
3 4
1 0
,
, B=
1 0
0 2
,
, B=
3 4
0 1
,
, B=
3 4
2 7
,
6. ZADANIA I PROBLEMY
(v)
A=
1 2
3 0
, B=
46
2 1
−1 1
.
12. Znaleźć wszystkie punkty równowagi gry G(A, B), gdzie:
1 1 0
1 2 0
B=
A=
3 4 2
−1 0 1
13. [8] W zależności od wartości parametrów opisać zbiór punktów równowagi gry G(A, B), jeśli
(i)
A=
−d − t22
0
−t2
−e −
t2
2
ρ
1
ρ
2
, B=
, B=
−d −
0
t1
2
−t1
−e − t21
,
oraz 0 < e < d, t1 , t2 < 2d,
(ii)
A=
(iii)
1
(ρ
2
− C)
0
1
(ρ
2
− C)
ρ
0
1
ρ
2
.
−λ ρ −ρ
A = −ρ −λ ρ , B = AT ,
ρ −ρ −λ
oraz |λ| < ρ.
14. Stosując iterowaną eliminację strategii dominowanych uprościć poniższe gry i znaleźć punkty równowagi.
(i)
( 25 , 1)
(4, 0)
(3, 0)
(2, 0)
(1, 0)
(0, 0)
(0, 1)
(2, 12 )
(3, 0)
(2, 0)
(1, 0)
(0, 0)
(0, 0)
(0, 0)
( 23 , 0)
(2, 0)
(1, 0)
(0, 0)
(0, −1)
(0, −1)
(0, −1)
(1, − 12 )
(1, 0)
(0, 0)
(0, −2)
(0, −2)
(0, −2)
(0, −2)
( 12 , −1)
(0, 0)
(0, −3)
(0, −3)
(0, −3)
(0, −3)
(0, −3)
(0, − 32 )
6. ZADANIA I PROBLEMY
(ii)
(iii)
47
(8, 3) (6, 4) (15, 0)
(9, 1) (7, 2) (6, 3)
(3, 2) (4, 3) (5, 4)
(2, 66) (3, 10) (4, 8)
(8, 3) (6, 4) (15, 0)
(9, 1) (5, 2) (6, 3)
(3, 2) (4, 3) (5, 4)
(2, 66) (3, 10) (4, 8)
15. Danych jest n oligopolistów. Poziom produkcji wynosi qi ∈ Si , i =
1, 2, . . . , n, funkcje kosztu produkcji
ci : Si → R, i = 1, 2, . . . , n oraz funkcja
Pn
ceny p : D → R, gdzie D = { i=1 qi | qi ∈ Si }. Zbudować grę stanowiącą model takiej sytuacji i przeprowadzić jej analizę przy pomocy eliminacji strategii
dominowanych oraz pojęcia równowagi Nasha w następujących przypadkach:
(i) n = 2, S1 = S2 = {0, 1, . . . , 5}, ci (q) = 20q, dla i = 1, 2.
q
0 1 2
p(q) 50 49 47
3 4 5 6 7 8
45 43 40 37 32 25
9 10
18 10
(ii) n = 3, S1 = S2 = S3 = {1, 2}, ci (q) = 20q, dla i = 1, 2, 3, p jak w (i).
(iii) n = 3, S1 = S2 = S3 = {1, 3}, ci (q) = 20q, dla i = 1, 2, 3, p jak w (i).
(iv) n = 2, S1 = S2 = [0, 1], ci (q) = q, dla i = 1, 2, p(q) = 2 − q.
16. Znaleźć funkcje reakcji i punkty równowagi duopolu p, c1 , c2 , jeśli
(i) p(q) = 2 − q, ci (qi ) = ai qi , gdzie ai > 0, i = 1, 2,
(ii) p(q) = 2 − q, ci (qi ) = qi2 , i = 1, 2.
oraz zbiory strategii obu graczy równe są [0, 1]. Znaleźć strategie dominowane
w powyższych przykładach.
17. Znaleźć funkcje reakcji i punkty równowagi oligopolu p, c1 , c2 , c3 , gdzie
p(q) = 3−q, ci (qi ) = qi , i = 1, 2, 3 oraz zbiory strategii wszystkich graczy równe
są [0, 1].
6. ZADANIA I PROBLEMY
48
18. Rozważmy grę trzyosobową, w której każdy z graczy ma do wyboru
dwie strategie a i b. Jeśli wszyscy wybiorą a (odp. b), to wszyscy otrzymują
wypłatę α (odp. β). W pozostałych wypadkach ci, którzy wybrali a otrzymują
γ a pozostali δ. Przedyskutować metodę znajdowania symetrycznego punktu
równowagi tej gry i jej mieszanego rozszerzenia w zależności od paramterów
α, β, γ, δ. (Symetryczny punkt równowagi to punkt równowagi postaci (s, s, s).)
Rozważyć przypadek α = 3, β = 1, γ = 0, δ = 2.
19. Rozwiązać następujące gry bimacierzowe:
(i)
A=
−10 2
1 −1
(ii)
A=
20. (Morrow
4
−1
A=
2
1
0
1 0
0 2
,B =
,B =
5 −2
−1 1
2 0
0 1
1994) Rozważmy następującą grę
3 −3 −1 −2
−1
2
2 −1 2
1
1
−1 0
4
0
,
B
=
6
−3 −1 1 −1
1 −3 −2 −1
0
.
bimacierzową:
0
2
−1
0
4
1 4
0
3 0
5
4 −1 2
4 1
4
1 3 −1
.
Rozwiązać powyższą grę poprzez iteracyjną eliminację strategii dominowanych.
[2]
21. (Avenhaus 1997) Rozważmy pasażera dojeżdżającego metrem do pewnego miejsca. Osoba taka, świadomie lub też nie, uczestniczy w pewnej grze
za każdym razem, gdy decyduje się wsiąść do kolei miejskiej. Pasażer korzystający z niej może bowiem kupić bilet na swój przejazd za c złotych lub też
jechać „na gapę”, ryzykując zarazem zapłacenie mandatu w wysokości m > c
złotych w razie ewentualnej kontroli. Zakładamy, że każda kontrola biletu kosztuje e złotych. Przyjmijmy, że strategia przewoźnika (gracz nr 1) jest określona przez p = procent pasażerów kontrolowanych, czyli prawdopodobieństwo
skontrolowania konkretnego pasażera; strategia pasażera określona jest przez
prawdopodobieństwo q tego, że pojedzie on na gapę.
6. ZADANIA I PROBLEMY
49
Zbudować model tej sytuacji jako gry w postaci strategicznej i przeanalizować go. [2]
W powyższym zadaniu pomijamy wątek etyczny.
22. [8] Rozważmy dwóch motocyklistów podjeżdżających równocześnie
do skrzyżowania z przeciwnych kierunków. Zakładamy, że wszystkie drogi są
dwukierunkowe. Gra polega na przejechaniu skrzyżowania i „przecięciu" jednocześnie drogi drugiego motocyklisty. Zakładamy, że gracze nie mogą jechać równocześnie. Jest to przykład 2-osobowej gry niekooperacyjnej. Niech S1 będzie
strategią polegającą na tym, że pierwszy motocyklista m1 czeka aż skrzyżowanie przejedzie drugi motocyklista m2 , a S2 niech będzie strategią polegającą na
tym, że m1 jedzie nie czekając aż skrzyżowanie przejedzie m2 . Ponadto, niech
S3 będzie następującą strategią: jeśli m1 wybrał strategię S1 , to m2 wybiera
S2 , jeśli natomiast m1 wybrał strategię S2 , to m2 wybiera S1 . Niech ǫ oznacza
czas obserwacji motocyklisty po przeciwnej stronie skrzyżowania, zanim jeden
z nich ewentualnie ruszy, a δ niech oznacza czas spędzony na środku skrzyżowania, w którym onieśmielają się wzajemnie, dopóki jeden z nich nie wycofa się.
Niech τ oznacza czas, który spędził każdy z motocyklistów na negocjowaniu
swojej jazdy bez przerywania. Wówczas macierze wypłat dla motocyklistów
m1 oraz m2 wyglądają następująco:
S1
S2
S3
S1
−δ − 21 τ
−τ
−τ
S2
0
−ǫ − 21 τ
0
S3
0
−τ
−δ − 12 τ
S1
S2
S3
S1
−δ − 21 τ
0
0
S2
−τ
−ǫ − 21 τ
−τ
S3
−τ
0
−δ − 21 τ
oraz
Znaleźć punkty równowagi powyższej gry.
23. Rozważmy I farmerów, z których każdy ma prawo do wypasu krów
na wspólnej łące. Ilość mleka produkowanego przez krowę zależy od całkowitej
ilości krów, powiedzmy N, pasących się na łące. Dochód z produkcji mleka
przez ni krów wynosi ni v(N) dla N < N , natomiast v(N) ≡ 0 dla N ≥ N ,
gdzie v(0) = 0, v ′ < 0 i v ′′ ≤ 0. Koszt każdej krowy wynosi c i zakładamy, że
krowy są idealnie podzielne. Ponadto czynimy założenie, iż v(0) > c. Farmerzy
6. ZADANIA I PROBLEMY
50
decydują jednocześnie ile krów kupić, przy czym wszystkie zakupione krowy
pasą się wspólnie.
(i) Opisać powyższą sytuację w terminach gry w postaci strategicznej.
(ii) Znaleźć punkt równowagi tej gry. [3]
24. Rozważmy dwóch graczy, z których każdy podaje nieujemną liczbę
całkowitą ai , i = 1, 2 równą co najwyżej 100. Jeżeli a1 + a2 ≤ 100, to gracz
i-ty otrzymuje wypłatę równą ai . Jeżeli a1 + a2 > 100 oraz ai < aj , to gracz
i-ty otrzymuje wypłatę ai , a gracz j-ty dostaje 100 − ai . Jeżeli a1 + a2 > 100
oraz ai = aj , to każdy z graczy otrzymuje 50. Usunąć wszystkie strategie słabo
dominowane. Iterować ten proces tak długo jak to możliwe. Pokazać, że powyższa gra jest rozwiązalna przez iterowaną eliminację strategii dominowanych i
znaleźć jej punkty równowagi. [9]
25. Rozważmy licytację, w której dwaj uczestnicy proponują jednocześnie
cenę (całkowitą wielokrotność 1 zł). Proponujący maksymalną cenę wygrywa
100 zł. Każdy płaci zaproponowaną przez siebie cenę, również w przypadku gdy
przegrywa. Ostatecznie liczy się czysty zysk uczestnika licytacji. Skonstruować
symetryczny punkt równowagi mieszanego rozszerzenia opisanej gry, w którym
każda propozycja ceny niższej niż 100 zł należy do nośnika strategii obu graczy.
[9]
Do rozdziału 4 - gry kooperacyjne i rdzeń
26. Znaleźć rdzeń gry kooperacyjej vn ze zbiorem graczy N = {1, ..., n}
określonej następująco vn (S) = [n/2]. ([n/2] oznacza część całkowitą liczby
n/2.
27. Wykazać, że gra wypukła ma niepusty rdzeń.
28. [9] Dane są skończone zbiory B i L (kupujących i sprzedających, odpowiednio). Każdy sprzedawca posiada jednostkę pewnego towaru, każdy z
kupujących chce kupić jednostkę tego towaru za cenę 1. Rozważmy grę v ze
zbiorem N = B ∪ L graczy określoną wzorem
v(S) = min{|B ∩ S|, |L ∩ S|}.
Obliczyć rdzeń v gdy
6. ZADANIA I PROBLEMY
51
(a) |B| > |L|,
(b) |B| = |L|.
29. Opisać zbiory stabilne gry v ze zbiorem N = {1, 2, 3} graczy takiej, że
v(A) = 1 wtedy i tylko wtedy, gdy A ma co najmniej 2 elementy, w pozostałych
przypadkach v(A) = 0.
30. [9] Mówimy, że gra kooperacyjna v jest prosta, jeśli v(S) = 0 lub
v(S) = 1 dla dowolnej koalicji S oraz v(N) = 1. Koalicja S, dla której v(S) = 1
jest nazywana koalicją wygrywającą. Gracz, który należy do wszystkich
koalicji wygrywających nazywany jest graczem veto.
(i) Pokazać, że jeśli nie istnieje gracz veto, to rdzeń jest zbiorem pustym.
(ii) Pokazać, że jeśli zbiór graczy veto jest niepusty, to rdzeń jest zbiorem
wszystkich imputacji dających nieujemne wypłaty tym graczom i wypłaty zerowe wszystkim pozostałym.
31. [9] Rozważmy n fabryk, z których każda pobiera wodę z jeziora oraz
wypuszcza do niego zanieczyszczenia. Każda fabryka potrzebuje czystej wody. Koszt oczyszczania wody dla jednej fabryki wynosi kc jeżeli k fabryk nie
oczyszcza zanieczyszczeń przed wprowadzeniem ich do jeziora, natomiast koszt
oczyszczenia ścieków wynosi b. Zakładamy, że c ≤ b ≤ nc.
(i) Zbudować grę kooperacyjną stanowiącą model powyższej sytuacji, w której wartość v(S) dla dowolnej koalicji S jest najwyższą wypłatą gwarantowaną przez S (to znaczy, v(S) jest najwyższą wypłatą koalicji S pod
warunkiem, że żadna z pozostałych fabryk nie oczyszcza zanieczyszczeń
przed wprowadzeniem ich do jeziora).
(ii) Znajdź warunki dla których gra ma niepusty rdzeń oraz warunki dla
których rdzeń powyższej gry jest zbiorem jednoelementowym.
(iii) Przedyskutuj interpretację rdzenia tej gry.
32. Wykazać, że gra stowarzyszona z rynkiem z przekazywalnymi wypłatami (zob. podrozdział 4.4) ma niepusty rdzeń.
6. ZADANIA I PROBLEMY
52
33. Rozważmy rynek hN, ℓ, (wi), (fi )i, gdzie N jest zbiorem agentów, ℓ
dodatnią liczba całkowitą (ilość dóbr), wi ∈ Rℓ+ wektorem (wyposażenie agenta
i), fi : Rℓ+ → R+ ciągłą niemalejącą funkcją wklęsłą (funkcja produkcji agenta
i).
Niech N = K ∪ M, gdzie K = {1, 2}, M = {3, 4, 5}. Ponadto niech ℓ = 2,
w1 = w2 = (2, 0), w3 = w4 = w5 = (0, 1) oraz fi (a, b) = min{a, b} dla
dowolnego i ∈ N.
(i) Zbudować grę kooperacyjną stanowiącą model powyższego rynku i oblicz
jej rdzeń.
(ii) Załóżmy, że agenci ze zbioru M tworzą syndykat, to znaczy wchodzą w
koalicje jedynie jako blok. Tak więc mamy trzech graczy. Jaki jest rdzeń
gry w tej sytuacji? Zinterpretować odpowiedź. [9]
Do rozdziału 5 - Gry dwuosobowe o sumie zerowej, gry macierzowe
34. Rozważmy grę opisaną przez
3 6
5 2
1 4
macierz:
1 4
4 2 .
3 5
Stosując metodę sympleks znaleźć wartość gry oraz strategię optymalną dla
każdego z obu graczy.
35. Znaleźć pary strategii optymalnych i wartości następujących gier macierzowych:
(i)
(ii)
4 3 1 4
2 5 6 3 ,
1 0 7 0
0
5 −2
−3 0
4 ,
6 −4 0
6. ZADANIA I PROBLEMY
(iii)
5
4
2
1
8
2
4
3
3
6
6
2
1
3
4
5
53
6
5
.
1
1
36. (Dresher 1961) Załóżmy, że istnieje n celów militarnych do obrony z d
obrońcami oraz a atakującymi. Wartości materialne celów wynoszą odpowiednio b1 < b2 < . . . < bn . Jeżeli i atakujących osób spotka się z j obrońcami w
celu militarnym numer k, to generał atakujących (gracz nr 1) otrzymuje wypłatę w wysokości bk (i − j), natomiast dowódca obrońców (gracz nr 2) otrzymuje
bk (j − i). Niech b zadane będzie następującą równością
n
1 X1
=
.
b
b
i
i=1
Uzasadnić następujące własności gry:
(i) W optymalnej strategii mieszanej, gracz nr 1 zawsze atakuje cel militarny angażując wszystkie swoje siły. Jeśli wszystkie cele są atakowane
z dodatnim prawdopodobieństwem, to cel i-ty jest wybierany z prawdopodobieństwem bbi , i = 1, 2, . . . , n.
(ii) W przypadku optymalnej strategii mieszanej, wartość gry wynosi v =
b(an−d), a gracz nr 2 broni i-ty cel ze średnią ilością obrońców wynoszącą
a − bvi , i = 1, 2, . . . , n. [2]
37. Rozważmy dwie pojedynkujące się ze sobą osoby, z których każda
może wykonać maksymalnie n kroków w kierunku przeciwnika oraz posiada
dokładnie jedną kulę w swoim pistolecie. Uczestnik pojedynku strzelający po
i-tym kroku trafia swojego przeciwnika z prawdopodobieństwem ni . Pojedynek
uznajemy za zakończony, jeżeli jeden z uczestników został trafiony lub oddano
oba strzały. Natomiast pojedynek uznajemy za nieroztrzygnięty, jeśli żaden
z uczestników nie został trafiony lub też trafieni zostali obaj równocześnie.
Odpowiednie wypłaty zadane są przez następujące pary (1, −1), (−1, 1) oraz
(0, 0).
(i) Wykazać, że powyższa gra posiada punkt równowagi w strategiach czystych. Spróbować odgadnąć rozwiązanie w ciągłej odmianie tej gry, w
której gracze zbliżają się do siebie ze stałą prędkością w pewnym przedziale czasu 0 ≤ t ≤ 1 i mogą strzelać w dowolnej chwili.
SPIS LITERATURY
54
(ii) Załóżmy, że pojedynek jest cichy, to znaczy pojedynkująca się osoba,
która nie została trafiona oraz nie zrobiła n-tego kroku nie wie czy jej
przeciwnik strzelił, czy też nie. Pokazać, że optymalne strategie są strategiami mieszanymi oraz że uczestnicy pojedynku nie oddadzą strzału
zanim nie zrobią więcej niż n3 kroków. [2]
Słowniczek niektórych terminów teorii gier.
payoff function - funkcja wypłaty
best response - najlepsza odpowiedź
Nash equilibrium - równowaga w sensie Nasha, punkt równowagi
value of a game - wartość gry
mixed extension - mieszane rozszerzenie
pure strategy - strategia czysta
mixed strategy - strategia mieszana
core - rdzeń
imputation - imputacja
Spis literatury
[1] E. Burger , Introduction to Theory of Games, Prentice-Hall, Inc., Englewood Cliffs, N.J. 1963.
[2] M.J. Canty, Resolving Conflicts with Mathematica. Algorithms for Twoperson Games, 2003, Academic Press.
[3] D. Fudenberg i J. Tirole, Game Theory, The MIT Press, Cambridge,
Massachusetts, 1991.
[4] R. K. Guy ed., Combinatorial Games, Proc. Symposia in Applied Math.
43, (1991) AMS.
[5] J. C. C. McKinsey, Introduction to The Theory of Games, The RAND
Corporation 1952.
[6] R. D. Luce i H. Raiffa, Gry i decyzje, PWN, Warszawa 1964.
[7] M. Malawski, H. Sosnowska i A. Wieczorek, Konkurencja i kooperacja.
Teoria gier w ekonomii i naukach społecznych, PWN 2006.
SPIS LITERATURY
55
[8] M. Mesterton-Gibbons, An Introduction to Game-Theoretic Modelling,
Student Mathematical Library, Vol. II, (2001) AMS.
[9] M. J. Osborne i A. Rubinstein, A Course in Game Theory, The MIT
Press, Cambridge, Massachusetts, 1996.
[10] G. Owen, Teoria gier, PWN Warszawa 1975. 3. P.D. Straffin, Teoria gier,
Scholar 2003.
[11] B. Peleg i P. Sudhölter, Introduction to the Theory of Cooperative Games,
Kluwer, 2003.
[12] J. S. Wencel, Elementy teorii gier, PWN Warszawa 1961.