Laboratorium Układów Sterowania
Niekonwencjonalnymi Źródłami Energii
Materiały pomocnicze do laboratorium
UKŁADY ŚLEDZENIA POZYCJI SŁOŃCA
1. Pozorny ruch Słońca
Każdego dnia Słonce zakreśla okręgi na Sferze Niebieskiej pokonując drogę ze
wschodu na zachód. Kształt trajektorii Słońca zmienia się w zależności od dnia roku i
położenia geograficznego. Do najważniejszych cech ruchu Ziemi nalezą:
Ruch obiegowy – ruch Ziemi po orbicie wokół Słońca (Rys. 2.5.)
Ruch obrotowy – pełny obrót dookoła własnej osi w ciągu 24 godzin
Orbita, po której porusza się Ziemia w rzeczywistości jest elipsą, jej niecentryczność
jest tak niewielka, że trudno odróżnić ją od okręgu. Pory roku spowodowane są
nieprostopadłym ustawieniem osi obrotu, której nachylenie wynosi 62,5°. Powoduje to
zmiany długości trwania dnia i nocy w ciągu roku, w miarę ruchu Ziemi po orbicie.
Rys. 1. Ruch Ziemi względem Słońca [5].
Ruch obrotowy Ziemi to inaczej obrót Ziemi wokół własnej osi. Czas jednego obrotu
względem odległych gwiazd wynosi 23 godziny 56 minut i 4,1 sekundy. Okres ten nazywa się
dobą. Na równiku prędkość wywołana obrotem Ziemi wynosi około 1674,4 km/h, bieguny
natomiast pozostają w miejscu. Tam gdzie na powierzchnię Ziemi padają promienie
słoneczne, panuje dzień, na pozostałym obszarze jest noc. Więc ruch obrotowy Ziemi jest
przyczyną zmiany dnia i nocy. W jedną godzinę Ziemia obraca się w przybliżeniu o 15° a w
cztery minuty o 1°.
Wymienione dwa ruchy Ziemi silnie wpływają na natężenie napromieniowania, zależą
od nich kąt padania promieni słonecznych zarówno w ciągu dnia, jak i roku.
Strona
2
W dowolnym punkcie Ziemi pozorne położenie Słońca określamy za pomocą dwóch
kątów: wysokość nad horyzontem h, i azymut α. Azymut jest to kąt zawarty pomiędzy rzutem
na płaszczyznę poziomą kierunku, w którym znajduje się Słońce, a północą, przyjmując
wschód jako 90°, południe 180°, a zachód 270°.
Rys. 2. Miejsca wschodu i zachodu Słońca w ciągu roku.
Gdy Słońce jest dokładnie na południu, azymut wynosi zero, a wysokość nad
horyzontem jest maksymalna. Ten moment określa się mianem południa słonecznego i jest to
wygodny punkt odniesienia, względem którego mierzy się porę dnia. Rysunek 2.6. obrazuje
miejsca wschodu i zachodu Słońca w porze przesileń. Wynika z niego, że moduły
fotowoltaiczne, które są montowane na sztywno typowo w kierunku południa, około 33%
czasu w lecie mają Słońce za sobą. Jest to znaczna stara energii, gdyż promieniowanie
bezpośrednie (które „niesie” najwięcej energii), w tym okresie ma udział rzędu 60%
promieniowania całkowitego.
„Przy opisie matematycznym
tego zjawiska najwygodniej
jest
zastosować
współrzędne astronomiczne w układzie horyzontalnym. Jest to taki układ sferyczny, którego
centrum jest w punkcie obserwacji, i którego kołem głównym jest horyzont, a kierunkiem
głównym –kierunek geograficznego południa. Aby wyznaczyć współrzędne słoneczne,
zakłada się, że Ziemia w punkcie obserwacji jest płaska, a horyzont widziany z tego punktu
Strona
3
jest nieruchomy i zatacza idealny okrąg.” [27] Przy takich założeniach azymut (ang. Azimuth)
i wysokość (ang. Altitude) Słońca są zobrazowane na rysunku 2.7.
Rys. 3. Układ horyzontalny [6].
Deklinacja Słońca δ nazywamy kat padania promieniowania słonecznego na
płaszczyznę równika. Deklinacje δ obliczamy według
wzoru Coopera (1), pozwala on
uzyskać dokładność do 1°.
(1)[5]
gdzie: n = kolejny dzień roku
Wysokość Słońca obliczamy, na podstawie wzoru (2) trygonometrii sferycznej:
(2) [5]
gdzie: ω
1 τs – 180
Azymut Słońca obliczamy, na podstawie wzoru (3).
(3) [5]
gdzie: φ – szerokość geograficzna (dodatnia dla półkuli północnej, ujemna dla południowej)
ω – kat godzinowy
τs – czas słoneczny
Strona
4
Czas słoneczny obliczamy, na podstawie wzoru (4)
τs = τ
E
(λL – λN)
(4) [5]
gdzie: E – stała w minutach (wartość pomijalna)
λN – południk, dla którego czas jest normalny (środkowoeuropejski λN = 15°)
λL – południk miejsca, dla którego określony jest czas słoneczny
W Polsce w czasie letnim należy dodatkowo odejmować 1h.
Kąt padania bezpośredniego promieniowania słonecznego na powierzchnie modułu
fotowoltaicznego i na każdą dowolną płaszczyznę, nachyloną do horyzontu pod kątem s,
można wg Benforda i Backa obliczyć według wzoru (5).
cos θ
sinδ cosφ cos s – sinδ cosφ sinφ cosα
cosδ cosφ cos s cosω
+ cosδ sinφ sin s cosα cosω + cosδ sin s sinα sinω
(5) [5]
Wysokość i azymut w różnych porach przesileń, dla szerokości geograficznej Gdańska
pokazano na rys. 2.8. Wykres został wygenerowany poprzez oprogramowanie dostępne na
stronie www.sunearthtools.com. Dokładne dane kąta azymutu i wysokości podane są dla dnia
21 marca 2011 roku o godzinie 12.00.
Rys. 4. Wysokość i azymut Słońca dla Gdańska
Strona
5
1.1. Rodzaj elementów napędowych
Elektryczne – osie napędzane serwomechanizmami lub silnikami prądu stałego ze
specjalnymi układami buforowymi.
Pasywne – osie napędzane przez siłowniki z niskotemperaturowym płynnym gazem (Rys. 5).
Ruch wywołany przez ciepło słoneczne, które podnosi ciśnienie gazu, w wyniku czego
siłownik przesuwa się, aż do momentu uzyskania równowagi. Plusem takiego rozwiązanie
jest brak kosztów energii na przemieszczanie modułów i brak systemu sterowania, wadą
natomiast nieprecyzyjne pozycjonowanie.
Rys. 5. Solar Tracker z pasywnym elementem napędowym[16]
Hydrauliczne – osie napędzane poprzez ruch siłowników hydraulicznych (Rys. 6).
Rozwiązanie stosowane przy ciężkich konstrukcjach nośnych, gdzie wymagana jest duża siła
z jednocześnie zachowaną precyzją pozycjonowania.
Rys. 6. Solar Tracker firmy SHS o wadze 19 ton z hydraulicznym elementem napędowym [17]
Strona
6
1.2. Charakter układów sterujących
Analogowe – wykorzystanie analogowych zespołów pneumatycznych, hydraulicznych lub
mechanicznych
Cyfrowe – zastosowanie elektroniki cyfrowej. Mają tu zastosowanie sterowniki PLC, układy
programowalne FPGA, komputery PC z kartami akwizycji danych , bramki logiczne, systemy
mikroprocesorowe, przetworniki A/C. Technika cyfrowa jest bardzo dobrze rozwinięta i koszt
urządzeń sterujących jest niski.
1.3. System Sterowania
Otwarty – pozycjonowanie oparte na podstawie wyliczonej pozycji Słońca, tzw. algorytm
zegarowy. Zmiana ustawienia następuje w określonych odstępach czasu.
Zamknięty – pozycjonowanie oparte na informacji z czujników i położeniu ogniw.
Stosowane są bardziej złożone algorytmy decyzyjne.
Hybrydowy – połączenie układu zamkniętego i otwartego.
Na Świecie nieustannie poszukiwane są nowe algorytmy sterowania układami nadążnymi.
1.4. Metody sterowania układem nadążnym
Poniżej zaproponowanych zostanie kilka rodzajów sterowań położeniem ogniwa
słonecznego. W opracowaniu nowych algorytmów sterowania pomogą wyniki analizy danych
symulacyjnych i obliczeniowych z powyższego rozdziału. Wszystkie systemy sterowania
będą posiadały zabezpieczenie na wypadek silnego wiatru i wysokiej temperatury.
1.4.1. Sterowanie w układzie otwartym – algorytm zegarowy
W sterowaniu tym zmiana położenia fotoogniw odbywa się w zdanych odstępach
czasowych na podstawie wyliczonej pozycji Słońca. Aktualna wartość kąta azymutu i
wysokości wyliczana jest na podstawie wzorów (6). Różnica pomiędzy aktualną pozycją
słońca a pozycja układu jest odchyłką od prawidłowego położenia, który układ regulacji ma
sprowadzić do zera.
1
(
Strona
7
1
(
1 cos(
cos(
3,94683sint+ 0,019334sin2t+ 0,05928sin(
1
cos(
π180
W = arcsin(sin(D) sin(S) + cos(D) cos(S) cos(15 (czas-12)))
A = (arcos((cos(S) sin(D) – cos(D) sin(S) cos(15 (czas-12))
))) / cos(W) (6)[25]
gdzie:
S – szerokość geograficzna w radianach
D – deklinacja
W – wysokość
A – azymut
Dzień – dzień roku (1-365)
Czas – w godzinach od 0 – 23
δ – dla Gdańska 54 N
Wady :
Wymagane precyzyjne ustawianie konstrukcji oraz wiązane z tym wysokie koszty
budowy układu
Wysokie koszty sterowania związane z ruchem w obu osiach Mała efektywność w
okresach zimowych
Brak reakcji na zmieniające się warunki atmosferyczne
Zalety:
Sterowanie nie podatne na zakłócenia
Strona
8
Rys. 7. Algorytm zegarowy
START
TAK
Ustaw na pozycje
poranną
NIE
Czy jest na
pozycji
porannej ?
TAK
Czy jest noc ?
NIE
TAK
Czy jest silny
wiatr?
NIE
Pobierz datę
Pobierz czas
NIE
Pobierz aktualne
położenie
TAK
Sprowadź uchyb
położenia do zera
Czy różnica
przekracza 10°
?
Oblicz położenie
1.4.2. Sterowanie w układzie otwartym – algorytm zegarowy zmodyfikowany
Propozycja nowego sterowania w układzie otwartym będzie odbywała się poprzez
zmianę położenia w zadanych odstępach kąta. Algorytm nieprzerwanie oblicza wartość
azymutu, jeżeli kąt zwiększy się o zadaną wartość w stosunku do ostatniej pozycji układ
regulacji sprowadza odchyłkę do wartości bliskiej zero. Zadany kąt będzie zależny od okresu
sterowania. Dla późnych dni jesiennych i wczesnej wiosny, gdy promieniowanie
bezpośrednie ma jeszcze duża wartość, układ będzie pozycjonowany co 15°, dla pozostałych
dni będzie to powyżej ustanowiona wartość 10°. Zmiana kąta wysokości odbywać się będzie
dwa razy do roku. Układ śledzenia będzie wyłączony w miesiącach od października do
lutego.
Strona
9
Zalety w porównaniu do tradycyjnego sterowania w układzie otwartym:
Niższe koszty budowy układu, związane z ruchem tylko w jednej osi,
nachylenie w pionie zmieniane ręcznie
Niższe koszty energetyczne sterowania związane z ruchem tylko w jednej osi
w ciągu dnia
Brak strat energii na sterowanie w okresie zimowym
Reakcja na miesięczne zmiany warunków nasłonecznienia, poprzez dane
zawarte w pamięci
Sterowanie nie podatne na zakłócenia spowodowane błędnym odczytem z
czujnika oświetlenia
Wady :
Wymagane precyzyjne ustawianie konstrukcji oraz wiązane z tym wysokie
koszty budowy układu
Brak reakcji na dzienne zmiany warunków atmosferycznych
Strona
10
Rys. 8. Algorytm zegarowy zmodyfikowany
START
Pobierz datę
BLOK A
TAK
Czy jest okres
zimowy?
NIE
TAK
Ustaw na pozycje
startową
Czy jest na
pozycji
porannej ?
NIE
TAK
Czy jest noc ?
NIE
TAK
Czy jest silny
wiatr?
NIE
TAK
Czy jest
Czy jesttemp
silny?
wysoka
wiatr?
NIE
Pobierz czas
Pobierz aktualne
położenie
NIE
Sprowadź uchyb
położenia do zera
TAK
Czy różnica
przekracza 10°
?
Strona
11
Oblicz położenie
w poziomie
1.4.3. Sterowanie w układzie zamkniętym z czujnikiem różnicowym
W tradycyjnym sterowaniu zamkniętym układ wyposażany jest w czujniki położenia
oraz oświetlenia. Wartością zadaną jest tu zerowa odchyłka od położenia dającego największy
zysk. Układ reaguje na zmiany warunków atmosferycznych, co daje dużą oszczędność energii
na sterowanie w dniach o słabym nasłonecznieniu. Aby otrzymać wiarygodne informacje o
oświetleniu takie jak poziom promieniowania, jego charakter: kierunkowość, stosunek
promieniowania bezpośredniego do całkowitego, wymaga się specjalistycznych i drogich
czujników nasłonecznienia, a tańsze czujniki fotowoltaiczne są podatne na zakłócenia. Czas
zwrotu kosztów takiego systemu sterowania jest długi, a w przypadku małych instalacji jest
nieopłacalny.
Alternatywnym rozwiązaniem jest sterowanie różnicowe. Wartością zadaną jest tu
utrzymywanie jednakowego oświetlenia par fotodetektorów. Taki układ zapewnia
identyfikacje położenia Słońca w dwóch płaszczyznach (Rysunek 9).
Rys. 9. Układ fotorezystorów w czujniku różnicowym [10]
Strona
12
Układ będzie działał poprawnie tylko przy słonecznym bezchmurnym niebie, co
czynni go podatnym na zakłócenia podczas częściowego zachmurzenia, gdzie Solar Tracker
będzie ustawił się na najjaśniejsze miejsce na niebie, co nie odpowiada największemu
zyskowi energetycznemu. Przy przeważającym udziale promieniowania rozproszonego,
promienie docierałyby ze wszystkich kierunków do fotodetektora, więc układ nieustannie
wyrównywał będzie różnice poziomu naświetlenia pary fotorezystorów do zera, co spowoduje
nieustanny ruch Solar Trackera, zwiększając koszty sterowania . Podobne zachowanie układu
zaobserwujemy, gdy promieniowanie odbite powstające wskutek odbić od elementów
krajobrazu i otoczenia, zakłóci działanie choćby jednego fotodetektora.
Propozycją zmniejszenia skutków działania zakłóceń jest zwiększenie histerezy
zadziałania układu, czyli zwiększenia różnicy poziomu naświetlenia przy którym nastąpi
wyrównanie poziomu naświetlenia. Założeniem tego sterowania, ze względu na wysokie
koszty, jest brak czujników promieniowania, więc wartość histerezy nie może być
dopasowywane przez układ sterowania do warunków nasłonecznienia, musi być ustalona na
stałe. Ustalenie jej na wysoki próg zadziałania spowoduje utratę mocy z energii słonecznej, za
niski, starty energii na częste pozycjonowanie.
Nowym pomysłem na eliminacje, lub częściowe zmniejszenia wpływu zakłóceń jest
zastosowanie filtra polaryzacyjnego. Filtr ten przepuszcza jedynie światło o polaryzacji
liniowej w wybranym kierunku. Światło pochodzące bezpośrednio od Słońca nie jest
spolaryzowane, więc filtr pochłaniałby
światło, rozproszone przez chmury , które jest
częściowo spolaryzowane oraz eliminował odbite od szyby lub powierzchni wody. Działanie
liniowego filtra polaryzacyjnego przedstawia (Rys. 10.). Filtr zamontowany zostałby nad
fotodetektorem jak na Rys. 9.
Rys. 10. Zasada działania filtra polaryzacyjnego liniowego [18]
Strona
13
Układ jednak nie reaguje na zmiany warunków atmosferycznych, z powodu braku
czujników promieniowania. Z teorii wiadomo, że wartość natężenia prądu ogniwa jest funkcją
natężenia promieniowania słonecznego. Mierząc ten prąd jesteśmy w stanie uzyskać
informacje o aktualnym poziomie nasłonecznienia i tym samym wykorzystać pracujące
ogniwo jako czujnik, bez ponoszenia dodatkowych kosztów. Na podstawie poziomu natężenia
prądu w ogniwie układ sterowania podejmie decyzje o załączeniu lub wyłączeniu śledzenia
oraz może dopasowywać wartość histerezy zadziałania. Tak jak w poprzednim rozwiązaniu
układ może być wyłączony w okresie zimowym. Zmiana nachylenia w pionie w ciągu dnia
może odbywać się rzadziej, ale tak aby zapewnić komfortową prace fotoelementów
odpowiadających za przesuw w poziomie. Wiemy, że zmiana położenia w pionie w ciągu
dnia nie przyniesie korzyści, stąd energia na jej sterowanie będzie tracona.
Zalety:
Brak wymagań precyzyjnego ustawiania konstrukcji
Niższe koszty budowy układu w porównaniu do sterowania otwartego, związane z
niższymi wymaganiami dokładności pozycjonowania
Brak kosztów czujników nasłonecznienia oraz położenia (jeżeli nie został
zastosowany silnik krokowy), które wymagane są przy sterowaniu w tradycyjnym
układzie zamkniętym
Brak strat energii na sterowanie w okresie zimowym
Reakcja na zmienne warunki nasłonecznienia
Wady:
Starty na sterowanie osią pionową
Układ podatny na zakłócenia
Niedokładne śledzenie Słońca
Efektywne działanie śledzenia tylko przy dobrych warunkach nasłonecznienia
Strona
14
Rys. 11. Algorytm różnicowy
START
BLOK B
BLOK A
Pobierz poziom prom.
NIE
Czy poziom prom.
jest wystarczający
TAK
Dostosuj histerezę zadziałania
do poziomu promieniowania
Pobierz wartość różnicy
oświetlenia fotoelementów
Wyrównaj poziom
naświetlenia elem.
TAK
Czy różnica
przekracza histerezę?
NIE
Strona
15
1.4.4. Sterowanie metodą śledzenia MPP
Sterowanie polega na śledzeniu punktu maksymalnej mocy uzyskiwanej z ogniwa.
Sterowanie będzie opierało się na metodzie wchodzenia i cofania się (ang. hill climbing
method), w której ekstremum osiąga się stosując technikę wspinaczkową. Algorytm ten
będzie polegał na niewielkiej okresowej zmianie położenia baterii słonecznej, a następnie
porównywaniu mocy oddawanej w danej chwili i mocy oddawanej przed zmianą położenia.
Jeśli chwilowa wartość mocy jest większa niż poprzednia, kierunek zmieniany położenia jest
określany jako krok pozytywny. W przypadku przeciwnym, gdy chwilowa wartość jest
mniejsza niż poprzednia, kierunek zmieniany położenia jest określany jako krok negatywny i
układ cofa się do ostatnio osiągniętego punktu ekstremalnego. Aby utrzymać osiągnięte
położenie, system sterowania będzie poszukiwał punktu maksymalnej mocy co 15 minut.
Główną wadą tego rozwiązania są oscylacje wokół optymalnego punktu położenia. Tak jak w
przypadku sterowania różnicowego przedstawionego powyżej system sterowania na
podstawie poziomu natężenia prądu w ogniwie podejmie decyzje o załączeniu lub wyłączeniu
śledzenia oraz może dopasowywać częstość jego działania oraz układ może być wyłączony w
okresie zimowym. Sterowanie nie wymaga dwóch ruchomych osi, nachylenie w pionie może
być zmieniane ręcznie dwa razy do roku.
Zalety:
Niższe koszty budowy układu, związane z ruchem tylko w jednej osi
Brak kosztów czujników nasłonecznienia oraz położenia
Brak strat energii na sterowanie w okresie zimowym
Reakcja na zmienne warunki nasłonecznienia
Wady
Wymagane precyzyjne ustawianie konstrukcji
Wyższe koszty energetyczne sterowania związane z oscylacjami wokół optymalnego
punktu położeni
Strona
16
Rys. 12. Algorytm MPP
START
BLOK B
Przesuń w prawo
o 6 stopni
TAK
i=0
Czy moc
wzrosła ?
NIE
NIE
Czy moc
zmalała ?
TAK
R=i+1
NIE
Czy liczba
zmian poł: R>2
TAK
Czekaj 15 min
Strona
17
Wróć do ostatniej
wartości maks.
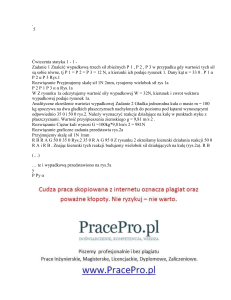
1.4.5. Podsumowanie
Na bazie zaproponowanych powyżej metod sterowania można tworzyć układy
hybrydowe łącząc zalety i eliminując wady poszczególnych rodzajów sterowań. Przykładowo
– połączenie algorytmu zegarowego i MPP umożliwiało by zabezpieczenie się przed
błądzeniem układu w poszukiwaniu punktu maksymalnej mocy lub może uzależnić
sterowanie zegarowe od zmian warunków nasłonecznienia. Połączenie algorytmu
różnicowego z MPP umożliwiło by sterowanie położeniem modułu fotowoltaicznego w dni
słoneczne przez układ różnicowy w pochmurne poprzez zastosowanie metody MPP.
Aby opłacalne było stosowanie układu sterowania położeniem baterii słonecznej, musi
po pierwsze przynosić zysk energetyczny w stosunku do układu stałego, po drugie koszt jego
zakupu musi zwrócić się w czasie krótszym niż, czas eksploatacji samych ogniw oraz
elementy składowe systemu sterowania muszą być mało awaryjne.
Żeby układ był
ekonomicznie opłacalny musi być spełniony warunek z wzoru 4.1.
>> 1
Strona
18
(7)
2. Stanowisko laboratoryjne
Schemat blokowy stanowiska laboratoryjnego został przedstawiony na rysunku 13.
sercem całego układu jest karta S65L z procesorem sygnałowym oraz układem logiki
programowalnej. Karata współpracuje z płyta interfejsów, która posiada dwa czterokanałowe
przetworniki analogowo – cyfrowe, oraz jest buforem miedzy karta a urządzeniami
zewnętrznymi.
KOMPUTER PC
CZUJNIKI
Komunikacja
OBROTNICA
I_obr
KARTA S65L
Sterowanie
położeniem
Odczyt, zapis
danych
PRZEKAŹNIKI
Sterowanie, odczyt
INTERFEJS
Sterowanie
T1-on, T2_on
PANEL SŁONECZNY
MULTIPLEKSER
Pomiar – ufv, ifv,
uc2, u_wy, iL1, iL2
PRZETWORNICA
ufv, ifv
Różnicowy
Temperatury
Położenia
Zmierzchowy
OBCIĄŻENIE
U_wy, I_wy
Rys. 13. Schemat blokowy stanowiska laboratoryjnego
Na rysunku 14 został przedstawiony schemat połączeń wszystkich urządzeń
pracujących w układzie sterowania. Rozmieszczenie elementów na schemacie jest zgodne z
ich rozmieszczeniem na rysunku 13. Strzałkami zielonymi zaznaczono kierunek przepływu
sygnałów pomiarowych – dla przetwornika A/C oraz sterujących – pracą multipleksera,
przetwornicy i przekaźników. Strzałkami czerwonymi zaznaczono przepływ sygnałów o
dużej mocy – do obrotnicy, obciążenia; modułu fotowoltaicznego, transformatora i zasilacza.
Płyta multipleksera jest jednocześnie zasilaczem czujników pomiarowych. Komputer PC
służy do odczytu i wizualizacji danych pomiarowych oraz zadawania parametrów sterowania
takich jak: rodzaj systemu sterowania, czas, data.
Strona
19
Sygnały dużej mocy
Rys. 14. Schemat połączeń stanowiska
Strona
20
Sygnały pomiarowe,
sterujące małej mocy
2.1. Ogniwo fotowoltaiczne
Moduł ogniw słonecznych firmy SOLARA Serii M,
model SM60 (Rys. 15). Baterie te są przeznaczone do
pracy na jachtach, łodziach, oświetleniu nawigacyjnym
oraz
szalupach ratunkowych – są odporne na wodę
morską.
Rys. 15. Moduł DM60M [10*]
Właściwości:
Cienki
Przód wykonany z plastikowej foli, nie ulega uszkodzeniom na skutek uderzenia
Wysoka sprawność
Powierzchnia przednia o wysokiej przepuszczalności promieniowania
Samoczyszczący
Szczelna i płaska skrzynka przyłączeniowa z wyprowadzonym przewodem odpornym
na wodę i promieniowanie UV
Łatwy montaż poprzez klejenie lub przykręcenie
Parametry elektryczne i wymiary:
Średnia produkcja dzienna energii
75 Wh/d
Moc maksymalna Pmax
18 W
Napięcie systemu
12 V
Napięcie w punkcie mocy max.
19 V
Napięcie na otwartych zaciskach
22,6 V
Prąd max. Imax
0,94 A
Prąd zwarciowy
1,1 A
Długość
620 mm
Szerokość
250 mm
Głębokość
2 mm
Waga
1,65 kg
Strona
21
2.2. Obrotnica
Konstrukcja
odpowiedzialna
za
ruch
modułu
słonecznego to zewnętrzna obrotnica od kamery
przemysłowej
model
konstrukcja zapewnia
YT-203
(Rys.
16).
Jej
płynny ruch w każdym
kierunku oraz wysoką dokładność pozycjonowania.
Rys. 16. Obrotnica YT203 [10*]
Właściwości:
Aluminiowa, malowana proszkowo obudowa, z czterema ringami uszczelniającymi pełna hermetyczność
Regulowane z zewnątrz krańcówki
Prostota sterowania
Duża nośność
Parametry elektryczne i wymiary:
Poziom: 350°
Zakres obrotu
Pionie: ±50°
Poziom: 6°/s.
Prędkość obrotu
Pion: 3°/s.
Zasilanie
24V AC
Maksymalne obciążenie
15 kg
Temperatura pracy
-40°C ~ +40°C
Waga
5,7 kg
Wymiary
Ø200 mm x 248 mm
Materiał
Aluminium
Strona
22
2.3. Czujniki
2.3.1. Czujnik położenia w pionie
Urządzeniem odpowiedzialnym za pomiar odchylenia w pionie jest inklinometr firmy
Kubler model IS40 (Rys. 17). Pozwala on na mierzenie wychyleń w 2 wymiarach i jest
urządzeniem specjalnie podyktowanym dla instalacji solarnych.
Rys. 17. Inklinometr Kubler IS40 [18*]
Właściwości:
Zakres pomiarowy ±45°
Minimalna przestrzeń montażowa 20 x 30 x 60 mm
Wysoka rozdzielczość i dokładność
Interfejs prądowy lub napięciowy
Wysoka odporność na uderzenia, wibracje, wilgoć
2.3.2. Czujnik położenia w poziomie
Elementem odpowiedzialnym za pomiar położenia w poziomie jest potencjometr
wieloobrotowy firmy Velleman (Rys. 18)
Rys. 18. Potencjometr wieloobrotowy [19*]
Właściwości:
Rezystancja 10 kom /2W
Tolerancja ±5%
Ilość obrotów ośki – 10
Maksymalne napięcie pracy 320V
Strona
23
2.3.3. Czujnik zmierzchowy
Układ pozwala na automatyczne wyłączanie śledzenia w nocy i jego włączenie w
dzień (Rys. 19). Czujnik światła generuje sygnał zależny od panujących warunków
oświetleniowych..
Rys. 19. Wyłącznik zmierzchowy [20*]
Właściwości
Płynna regulacja czułości
Układ opóźniający załączenie – zabezpieczenie przed oscylacjami
Element wyjściowy - przekaźnik
Obciążalność styków 24 V/3 A
2.3.4. Czujnik temperatury
Do pomiaru
temperatury użyto precyzyjnego czujnika LM35 (Rys. 20), którego
wyjście napięciowe jest proporcjonalne do zmiany temperatury w skali Celsjusza.
Rys. 20. Czujnik temperatury [19]
Właściwości:
Skalibrowany w stopniach Celsjusza
Zakres pomiarowy: –55°C ~ 155°C
Zależności temperatury od napięcia 10,0 mV/°C.
Nieliniowość ¼ °
Strona
24
2.3.5. Czujnik różnicowy
Zaprojektowany czujnik różnicowy (Rys. 21) składa się z czterech fotorezystorów,
odgrodzonych nieprzezroczystymi, matowymi przegrodami. Powierzchnia światłoczuła
fotoelementów jest przesłonięta liniowym filtrem polaryzacyjnym.
Rys. 21. Czujnik różnicowy
Wzmacniacz operacyjny zasilany jest napięciem symetrycznym ±5V. Elementy R7,
R8 to fotorezystory, tworzące wraz z rezystorami R5 i R6 mostek pomiarowy, warunkiem
jego równowagi jest spełnienie zależności: R5+R8 = R6+R7. Wzmacniacz operacyjny w
układzie różnicowym z wzmocnieniem równym 10, odejmuje sygnały pojawiające się na
nóżkach 2,3, gdy układ mostka jest w równowadze (oba fotorezystory są równomiernie
naświetlone) poziom napięcia wyjściowego jest równy zero. W przypadku wzrostu
naświetlenia jednego z fotoelementów mostek wychodzi z równowagi, co skutkuje
pojawianiem się napięcia wyjściu. Poziom i znak napięcia zależny jest od różnicy
naświetlenia fotoelementów. Potencjometr P1 służy do kalibracji systemu, ze względu na
rozrzut technologiczny elementów. Schemat elektryczny układu dla osi X przedstawia na
rysunek 22, dla osi Y układ jest analogiczny.
Rys. 22. Schemat czujnika różnicowego
Strona
25
Czujnik różnicowy - sterowanie w bliskiej podczerwieni
Czujnik różnicowy do sterowania w podczerwieni (Rys. 23), jako elementów
światłoczułych użyto fototranzystorów. Układ został tak zaprojektowany, aby mógł być
stosowany zamiennie z układem na fotorezystorach w tej samej obudowie. Powierzchnia
światłoczuła fotoelementów jest przesłonięta liniowym filtrem polaryzacyjnym.
Rys. 23. Czujnik różnicowy w podczerwieni
Zasada działania czujnika podczerwieni jest identyczna jak
czujnika na
fototranzystorach. Promieniowanie podczerwone ma dużo większą przenikalność w złych
warunkach atmosferycznych: w deszczu, śniegu, mgle, dymie oraz kurzu, niż promieniowanie
widzialne, na którym oparte jest sterowanie z fotorezystorami. Przy słabym zamgleniu
powietrza promieniowanie podczerwone ma aż o dwa razy większy zasięg niż widzialne.
Powoduje to, zwiększenie precyzji śledzenia Słońca przy użyciu detektorów podczernieni.
Układ elektroniczny posiada dodatkowy kondensator C7 w obwodzie sprzężenia zwrotnego w
celu eliminacji szumów, oraz zwiększenia stałej czasowej urządzenia, aby czujnik nie
reagował na chwilowe zmiany naświetlenia, bądź zewnętrzne zakłócenia. Schemat
elektryczny układu dla osi X przedstawia na rysunek 24, dla osi Y układ jest analogiczny.
Rys. 24. Schemat czujnika różnicowego pracującego w podczerwieni
Strona
26
2.4. Elektronika sterująca
2.4.1. Karta S65L + Płyta interfejsów
Karta z interfejsem firmy MMB Drives (Rys. 25) służy do uruchamiania
oprogramowania w układzie z procesorem w pętli obliczeniowej oraz są podstawą układów
pracujących autonomicznie. Głównym elementem karty S65L są: procesor sygnałowy
ADSP21065L oraz układ programowalny FLEX6016. Procesor trzydziestodwubitowy jest
jednostką zmiennoprzecinkową, o mocy obliczeniowej 66 MIPS. Układ FPGA posiada
trójstanowe wyjścia oraz 1320 bloków logicznych. Płyta interfejsów zawiera wzmacniacze
wejściowe i wyjściowe, przetworniki C/A i A/C (8 kanałów), dodatkowe układy logiki
programowalnej. Karta jest podłączona z komputerem poprzez port światłowodowy.
Rys. 25. Karta S65L wraz z karta interfejsów [11*]
Właściwości:
Możliwość realizacji skomplikowanych wymagań stawianych przez obiekty sterowane
Pełne i kompletne narzędzie do realizacji sterowania
Program komunikacyjny pozwala za pośrednictwem komputera sterować pracą układu
Łatwa możliwość modyfikacji rejestrów komunikacyjnych oraz realizacji zapisu i
odczytu z pamięci
Programowanie w języku C i VHDL
Konstruowany układ może zostać przygotowany w oparciu o symulacje w języku C
Wymagane oprogramowanie narzędziowe: VisualDSP Integrated Development
Environment firmy Analog Devices oraz MAX PLUS2 firmy ALTERA
Strona
27
2.4.2. Przetwornica DC/DC
Sterowalna przetwornica DC/DC (Rys. 26) w instalacji fotowoltaicznej, w połączeniu
z odpowiednim algorytmem wyszukiwania punktu MPP zapewnia odpowiednie dopasowanie
energetyczne modułów PV do obciążenia. Przetwornica została wykonana przez firmę MBB
Drives.
Rys. 26. Przetwornica DC/DC [11*]
Większość modułów i systemów PV charakteryzuje się niskimi wartościami napięcia
wyjściowego DC i średnimi wartościami rezystancji wewnętrznej. Optymalne warunki
zasilania obciążenia mogą wystąpić jedynie po zastosowaniu przetwornicy dopasowującej
własności źródła i obciążenia. Układ pozwala na zasilanie obciążenia, zarówno o bardzo
wysokiej, jak i bardzo niskiej rezystancji wewnętrznej z zadowalającą sprawnością. Proces
ten
polega
na
transformacji
napięcia
wejścia/wyjścia
(DC/DC)
z
określonym
współczynnikiem. Zależnie od wartości współczynnika, napięcie wyjściowe może być niższe
bądź wyższe niż wejściowe, a dopasowanie rezystancji zależy od kwadratu tego
współczynnika. Zaletą stosowania przetwornic DC/DC jest możliwość kontrolowania tego
współczynnika przez regulator. Jest on wykorzystywany w metodzie P&O MPP.
Pomiar charakterystyki ogniwa fotowoltaicznego można zrealizowany jest przez
wymuszenie napięcia minimalnego, a następnie maksymalnego. Ponieważ zmiana wartości
napięcia nie odbywa się natychmiastowo, można wielokrotnie zmierzyć wartości napięć oraz
prądów, i w ten sposób utworzyć charakterystykę prądowo – napięciowa ogniwa.
„Algorytm Perturb and Observe (P&O) polega na niewielkim okresowym
podwyższaniu lub obniżania napięcia, a następnie porównywaniu mocy oddawanej w danej
Strona
28
chwili i mocy oddawanej przed zmianą napięcia. Na podstawie porównania mocy wyznacza
się kolejną wartość przyrostu napięcia oraz jego znak. Do zalet tej metody poszukiwania
punktu maksymalnej mocy należy zaliczyć brak przerw w oddawaniu mocy oraz wysoką
skuteczność przy dużych wartościach nasłonecznienia. Główne wady to ciągłe oscylacje
wokół optymalnego punktu pracy i brak możliwości odnalezienia wszystkich ekstremów
lokalnych, gdy ogniwo jest częściowo przesłonięte „[11]. Konfiguracja przetwornicy DC/DC
w instalacji fotowoltaicznej pokazana jest na rysunku 27.
MODUŁ
PRZETWORNICA
FOTOWOLTAICZNY
DC/DC
OBCIĄŻENIE
C/A
A/C
MIKROKONTROLER
Rys. 27. Konfiguracja przetwornicy w układzie PV
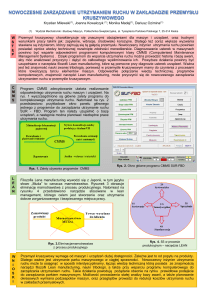
Schemat elektryczny przetwornicy – rysunek 28. Zwiększenie (ang. boost) wartości
napięcia ogniwa odbywa się przez załączenie tranzystora T1. Zmniejszenie (ang. buck)
wartości napięcia odbywa się przez załączenie tranzystora T1.
Rys. 28. Schemat przetwornicy DC/DC [9*]
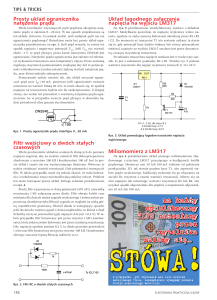
Poniżej znajdują się schematy regulatorów sterujących tranzystorami. Regulator R1
sterujący tranzystorem mocy T1 – rysunek 29. Regulator R2 sterujący tranzystorem mocy T2
– rysunek 30.
Strona
29
Rys. 29. Schemat blokowy regulatora (R1) tranzystora przetwornicy „boost” (T1) [9*]
Rys. 30. Schemat blokowy regulatora (R2) tranzystora przetwornicy „buck” (T2) [9*]
Gdzie:
ufv_zad – napięcie wyznaczone z algorytmu szukania punktu pracy z najwyższą mocą
pobieraną z ogniwa słonecznego,
ufv – napięcie na ogniwie słonecznym,
uc2 – napięcie na kondensatorze C2,
iL1_zad – prąd regulatora R1,
iL1 – prąd dławika L1,
iL2_zad – prąd regulatora R2,
iL2 – prąd dławika L2,
T1_on – czas przewodzenia tranzystora „boost”,
T2_on – czas przewodzenia tranzystora „buck”.
Właściwości:
Moc maksymalna: 50W
Maksymalna sprawność: do 90%
Napięcie wejściowe maksymalne: 30V DC
Napięcie wyjściowe: 13.8V DC
Prąd wyjściowy ciągły: 3A
Strona
30
2.4.3. Karta przekaźników
Płyta z przekaźnikami firmy MMB Drivers (Rys. 31) służy do podawania napięcia
zasilającego silniki obrotnicy.
Rys. 31. Karta przekaźników
Właściwości:
Maksymalny prąd przełączania: 3A
Trwałość elektryczna styków: 250AC/ 0,5A – 500 000 przełączeń
2.4.4. Multiplekser + Zasilacz czujników
Multiplekser (Rys. 32) posiada 8 kanałow analogowych przełączanych binarnie,
sygnał wyjściowy podwany jest na przetwornik analogowo – cyfrowy. Według producenta
zapewnia szybkość przełączania 400ns na kanał. W rzeczywistości taki czas powodował
chaos w odczycie parametrów, poprawność działa uzyskano dopiero przy czasach rzędu
10ms. Na płycie znajduje się zasilacz stablizowany zapewniajacy stabilne zasilanie
czujników.
Rys. 32. Płyta Multipleksera i zasilacza
Właściwości:
Zabezpieczenie sygnałów wejściowych od chwilowego zwarcia
Filtry przeciwzakłóceniowe na wejściu
Strona
31
2.5. Zasilanie
2.5.1. Transformator
Transformator (Rys. 33) zapewnia obrotnicy zasilanie napięciem o wartości
nominalnej. Prąd uzwojenia wtórnego dopasowany jest do poboru prądu obrotnicy
wynoszącym 960 mA.
Rys. 33. Transformator Indel - TSZZM25/013M/1 [22*]
Właściwości:
Napięcie wtórne: 24V
Moc: 25VA
Prąd uzwojenia wtórnego: 1,04A
2.5.2. Zasilacz impulsowy
Zasilacz impulsowy AC-DC (Rys. 34) ze stabilizowanymi napięciami wyjściowymi,
zapewnia zasilanie przetwornicy, multipleksera połączonym z zasilaczem czujników oraz
karcie S65L wraz z płytą interfejsu.
Rys. 34. Zasilacz impulsowy ZL230-40-4
Właściwości:
Moc wyjściowa: 40W
Zakres napięć wyjściowych: +5V; +15V; -15V; +24V (1A; 0,3A,0,3A,1A)
Strona
32
2.6. Elementy dodatkowe
2.6.1. Koncentrator
Koncentrator promieniowania (Rys. 35) wykonany z foli lustrzanej firmy Euro – Print
Marketing przyklejonej na nieprzezroczysta płytę z tworzywa sztucznego. Takie rozwiązanie
zmniejsza wagę elementu, zapewniając jednocześnie sztywność oraz odporność na warunki
atmosferyczne.
Rys. 35. Koncentrator promieniowania [22]
Właściwości foli:
74% refleksji światła widzialnego
70% refleksji promieniowania cieplnego
2.6.2. Obudowa
Obudowa FIBOX (Rys. 36) w klasie szczelności IP67, pozwala na pracę urządzenia
warunkach zewnętrznych, zapewniając ochronę elektroniki przed deszczem, wiatrem itp.
Rys. 36. Obudowa FIBOX [21]
Właściwości:
Temperatura pracy: -40 ~ 60°C
Materiał obudowy: ABS
Strona
33
2.7. Oprogramowanie
2.7.1. Program TKombajn
Konsola TKombajn (Rys. 37)została stworzona do komunikacji pomiędzy
komputerem PC wyposażonym w port szeregowy oraz sterownikiem mikroprocesorowym
SH65L.
Rys. 37. Okno programu TKombajn [9*]
Program umożliwia zapis i odczyt wartości mikroprocesora. Odczyt wszystkich parametrów
odbywa się co 250ms, umożliwia to w pełni uchwycenie poboru prądu przez obrotnice.
Sterowanie:
Wybór algorytmu sterowania, zadawanie daty
Odczyt:
Wartości napięcia i prądu modułu fotowoltaicznego, prądu obrotnicy
Wartości parametrów sterowania przetwornicą
Wartości kąta azymutu i wysokości, napięć różnicowych, temperatury
Strona
34
2.7.2. Struktura ALTERY – MAX+Plus II
Urządzenia zewnętrzne: przetwornik A/C, przekaźniki, multiplekser, sterowane i
odczytywane są z poziomu układu logiki programowalnej, która przez procesor DSP widziana
jest jako pamięć zewnętrzna. Wszystkie dane dla procesora uaktualniane są co 20μs. Zmienna
ZATRZASK powstała z podzielenia częstotliwości zegara kwarcowego. Zmienna W_REG
służy do zapisu wartości, które wysłane zostały z mikroprocesora, natomiast zmienna R_REG
do odczytu wartości, które zczytywane są przez mikroprocesor.
Układ z rysunku 38 odpowiada za sterowanie przekaźnikami. Informacja o załączeniu
przekaźnika przesyłana jest z mikroprocesora w rejestrze W_REG3, przyjęto cztero bitowa
szerokość szyny (D[3..0]), co pozwala przesłać informacje dla czterech przekaźników. Dane
są zatrzaskiwane w przerzutniku typu D i przy zatrzasku podawane na odpowiednie piny
układu FPGA. Zmienna o nazwie EX0 do EX3 steruje przekaźnikami PZ1 do PZ4. Aby
uniknąć niepotrzebnego załączania styczników podczas startu urządzenia, pin (Enable)
bufora sterującego włączono na stałe do układu FPGA.
Rys. 38. Układ odpowiadający za sterowanie przekaźnikami
Ze względu na jedno wolne wejście w przetworniku A/C, użyto multipleksera.
Sygnały dochodzące do wejść multipleksera są przełączane kolejno na wejście przetwornika
A/C. Przełączaniem kanałów steruje mikroprocesor, informację z danego kanału otrzymujemy
co 150ms. Przełączanie multipleksera analogowego polega na podaniu odpowiedniej
kombinacji bitów na wejścia sterujące A0, A1 i A2. Układ odpowiadający za jego sterowanie
(Rys. 39) działa analogicznie do układu z rysunku 38, dane są przesyłane w rejestrze 6 –
W_REG6. Zmienna M, adresuje kolejne kanały multipleksera.
Strona
35
Rys. 39. Układ odpowiadający za przełączanie multipleksera
Wraz z odczytem danych z przetwornika A/C na czterech najstarszych bitach
odczytywany jest adres kanału multipleksera. Rozwiązanie to umożliwia identyfikacje
zmiennej, która została zatrzaśnięta na wejściu przetwornika A/C.
Rys. 40. Układ do adresowania kanałów multipleksera
Układ z rysunku 41. przekazuje do systemu sterowania informacje o wykryciu nocy
przez czujnik zmierzchowy. Informacja czytana jest z rejestru R_REG15.
Rys. 41. Układ odczytujący stan przekaźnika wyłącznika zmierzchowego
Strona
36
2.8. Stanowisko Laboratoryjne
Rys. 42. Elektronika sterująca
Rys. 43. Solar Tracker – widok z boku
Strona
37
Rys. 44. Solar Tracker – widok z tyłu
Rys. 45. Solar Tracker – widok z przodu
Strona
38
3. Analiza pracy Solar Trackera
Na stanowisku zaimplementowano dwa algorytmy sterowania: różnicowy i zegarowy. Za
pomocą programu TKombajn (Rys.6.1), można na bieżąco śledzić zmianę położenia ogniwa
w obu płaszczyznach(p_poziom, p_pion), zmianę napięć różnicowych (roz_pozio, roz_pion),
energię pobieraną przez obrotnicę (energia_trackera), moc uzyskana z baterii słonecznej
(energia_ogniwa), napięcie oraz prąd ogniwa (UFV, IFV). W przypadku sterowania
zegarowego program podaje nam wyliczoną pozycję Słońca (Azymut, Wysokość)z
rozdzielczością 0,5 godziny.
Rys. 46. Okno programu TKombajn – zadawanie i odczyt parametrów
Aktywowania algorytmu sterowania odbywa się poprzez zadanie numeru:
1. Dla algorytmu różnicowego
2. Dla algorytmu zegarowego
Funkcje algorytmu sterującego aktywowane są po zadaniu odpowiadającego mu numeru.
Aby śledzenie przebiegło poprawnie, przy załączaniu sterowania układ musi znaleźć się w
położeniu porannym oraz w odpowiedniej pozycji do południa – zgodnie z dołączonym do
stanowiska kompasem i wskaźnikiem na podstawie urządzenia. Jeżeli jest w innej pozycji, niż
wymagana, należy zmienić czułości zadziałania wyłącznika zmierzchowego, tak aby układ
wykrył noc. Czujnik nie reaguje na nagłe zmiany oświetlenia, więc czasowy brak reakcji na
zmierzch nie oznacza błędnego działania, jest to informacja ważna dla osób obsługujących
urządzenie. Każde wykrycie zmierzchu to informacja dla programu, że należy ustawić Solar
Trackera w pozycji porannej.
Aby algorytm różnicowy mógł pracować, wymagane jest ustawienie wartości (ster) na 1
oraz wykrycie przez czujnik zmierzchowy dnia. Program uruchomi silniki obrotnicy gdy
wartość napięcia różnicowego przekroczy +2V dla pierwszego fotoelementu lub –2V dla
drugiego. Gdy wartość napięcia różnicowego znajdzie się pomiędzy +1,5V a –1,5V program
Strona
39
blokuje zadziałanie przekaźników, bez względu na to jakie wartości
zostaną dla nich
wystawione w pozostałej części programu. Jest to zabezpieczenie, które zapewnia
zatrzymanie śledzenia, gdy poziom napięć różnicowych znajdzie się w histerezie zdziałania.
Aby śledzenie przebiegało płynnie, bez zbędnych ruchów na granicy zadziałania
±2V,wymagane było chwilowe podtrzymanie uruchamianego przekaźnika. Podtrzymanie
przekaźnika utrzymuje się dla wartości napięcie różnicowego od +2V do +1,5V lub -2V do –
1,5V.
Uruchomienie algorytmu zegarowego wymaga ustawienia wartości (ster) na 2 oraz
wykrycia przez czujnik zmierzchowy dnia. Następną czynnością jest wpisanie dnia, w którym
układ będzie śledził Słońce, zmienna (dzien) przyjmuje wartości od 0-365. Czas dla
algorytmu sterowania jest uzyskiwany na podstawie liczby przerwań mikroprocesora.
Przerwania są sumowane, a dla określonej liczby przerwań wystawiana jest wartość czasu w
godzinach. Zgodnie z wcześniejszymi rozważaniami, układ aktywuje silniki obrotnicy, gdy
różnica pomiędzy wyliczoną wartością położenia układu a rzeczywistą przekroczy 10°.
Algorytm przyspieszono kilkakrotnie, ponieważ program TKombajn posiada ograniczony
czas wykonywania pomiarów, który jest ograniczony do kilku minut. Aby trafnie ocenić
poprawność działania śledzenia, na podstawie stanowiska, pod obrotnicą nakreślono miejsca
wschodu i zachodu Słońca w ciągu roku. Aby sprawdzić poprawność wyliczania kątów dla
poszczególnych dni korzystamy z wykresu –
„Rys. 4. Wysokość i azymut Słońca dla
Gdańska”, który jest dołączony do dokumentacji stanowiska w formie papierowej. Algorytm
pozwala na jednoczesne pozycjonowanie baterii słonecznej w pionie oraz poziomie, zapewnia
to bardzo płynne działanie urządzenia nawet przy znacznym skróceniu czasu. Dla potrzeb
laboratorium, godzinę przeskalowano na 10s.
Testy obu systemów sterowania przeprowadzone na stanowisku badawczym, pozwalają
zweryfikować ich zalety i wady przedstawione w rozdziale „Systemy Sterowania”. W
przypadku algorytmu różnicowego, wymagana jest korekcja napięć różnicowych w pionie i
poziomie, więc układ musi poruszać baterią w obu osiach. Do pracy sterowania zegarowego
nie jest wymagany ruch w obu osiach. Drugą wadą sterowania różnicowego jest zwiększona
ilość ruchów obrotnicy potrzebnych do pozycjonowania. Zwiększa to koszty sterowania i
przyczynia się do szybszego zużycia elementów napędowych. Stosując algorytm zegarowy
znamy ilość ruchów Solar Trackera, w czerwcu będzie ich 27 w poziomie i 4 w pionie. Układ
jest więc 31 razy załączany w ciągu najdłuższego dnia w roku, dając tym samym a gwarancje
otrzymania 33% zysku zastosowanego śledzenia.
Strona
40
W celu weryfikacji poprawności działania układu sterowania, oraz jego dokładności
niezbędne jest przeprowadzenie odpowiednich pomiarów kątów oraz napięć. Wykres 1
obrazuje wartości kąta obliczone dla dnia 22 czerwca, wykres 2 odzwierciedla reakcje układu
na zadane położenie. Na tej postawie można stwierdzić, że układ poprawnie reaguje na
zadawane wartości sterowania, osiągając dużą dokładność pozycjonowania. Dla kąta 150°
dokładność pozycjonowania jest bliska 100%, dla pozostałych odchyłka wynosi niewiele
ponad 1°.
Wykres 1. Obliczone przez algorytm zegarowy wartości kąta azymutu
Wykres 2. Pomierzone wartości kąta azymutu
Następnym parametrem poddanym weryfikacji jest reakcja na zmianę położenia w pionie.
Wykres 3 obrazuje wartości kąta obliczone dla dnia 22 czerwca, wykres 4 odzwierciedla
reakcje układu na zadane położenie. Wartość kąta pionowego zawarta jest pomiędzy
kierunkiem geograficznej północy a baterią słoneczną, stąd wykres 4 jest odwrócony. Gdy
Słońce wschodzi kąt wynosi 0°, aby bateria była
ustawiona prostopadle do promieni
słonecznych, Solar Tracker musi ustawić ją pod kątem 90°. Układ nie reaguje na zmianę
wartości wysokości powyżej kąta 40°, spowodowane jest to mechanicznym ograniczeniem
wychylenia obrotnicy, której zakres kąta pracy wynosi 50°.
Strona
41
Wykres 3. Obliczone przez algorytm zegarowy wartości kąta wysokości
Wykres 4. Pomierzone wartości kąta wysokości
Przyrównanie wyliczonych wartości kątów
z ich wartościami rzeczywistymi z
rysunku 4 – „Wysokość i azymut Słońca dla Gdańska”, pokazuje, że równania matematyczne
zaimplementowane w algorytmie są poprawne. Poprzednie stanowisko laboratoryjne
posiadało błędny zapis matematyczny ruchu Słońca, kształt charakterystyki był zgodny z
ruchem Słońca po nieboskłonie, ale wartości katów azymutu i elewacji przyjmowały taka
sama wartość dla wszystkich dni w roku, a ich wartości nie odpowiadały rzeczywistości.
Zaimplementowane równia, są opracowane przez Toby Petersona, Justina Rice i JeffaValane
z Uniwersytetu Cornell w Itace [28] i dostosowane do implementacji w procesorze SHARK.
W celu weryfikacji poprawności działania sterowania różnicowego, przysłonięto
kolejno pojedyncze fotodetektory. Wykres 5 obrazuje zmianę napięcia w zależności od
stopnia przesłonięcia fotodetektorów odpowiadających za pozycjonowanie w poziomie.
Wykres 5. Poziom napięcia różnicowego w poziomie
Strona
42
Wykres 6. Zmiana położenia w poziomie
Zmiana położenia baterii następuje, gdy napięcie różnicowe przekroczy wartość +2V
lub -2V. Układ staruje z położenia porannego, do czasu 20s (odcinek 1) układ zmienia swoje
położenie w poziomie w celu wyrównania napięć na obu fotodetektorach, na krótko
stabilizuje się na 90° (Wykres 6). Przesłonięcie pierwszego fotodetektora w czasie 21,6s do
29,8s (odcinek 2), spowodowało powtórną zmianę położenie. Po odsłonięciu elementu układ
stabilizuje się na osiągniętym położeniu, jest stabilny i nie reaguje na zmianę promieniowania
rozproszonego co jest zasługą filtru polaryzacyjnego. Przesłonięcie drugiego fotodetektora w
czasie od 70,5s do 95s (odcinek 3) powoduje zmianę położenia w przeciwną stronę, po jego
odsłonięciu napięcie różnicowe znajduje się w histerezie zadziałania i system sterowania
wyłącza obrotnice. Zmiana położenia dobywa się bardzo płynnie, bez zbędnych ruchów.
Wykres 7. Poziom napięcie różnicowego w pionie
Wykres 8. Zmiana położenia w pionie
Strona
43
Pozycjonowanie w pionie działa analogicznie do pozycjonowania w poziomie. Na
odcinku 1 (Wykres. 7) wymuszono wzrost napięcia różnicowego co skutkowało zmianą
położenia w celu zrównania napięcia (Wykres 8). Prosty układ różnicowy spełnia swoje
zdanie, pracuje poprawiane, a jego praca jest stabilna.
Wykres 9. Zmiana temperatury
W celu zabezpieczenia ogniwa przed przegrzaniem, mierzy się jego temperaturę. Na
wykresie 9 temperatura się nie zmienia i ma wartość 30°C. Pomiar trwał krótko a ogniwo
pracowało w pomieszczeniu, stad brak zmian temperatury.
Strona
44
Instrukcja obsługi przetwornicy sterującej ogniwem
1.
Otwieramy skrót do programu Kombajn znajdujący się na pulpicie oznaczony ikonką
Oznaczenia zmiennych :
UFV – napięcie na ogniwie
IFV – prąd ogniwa
Pin – moc ogniwa
Usn_sk – napięcie skuteczne na silniczkach poruszających układ
Isn_sk – prąd na silniczkach poruszających układ
Psn – moc potrzebna na poruszanie silnikami
energia_ogniwa - energia produkowana przez ogniwo
energia_trackera – energia potrzebna na pracę silniczków w układzie
2.
Po uruchomieniu programu należy wybrać przycisk Load program to processor
Strona
45
3.
Należy uruchomić przesyłanie informacji do procesora używając przycisku Send start command to
processor
4.
Następnie ściągnąć dane do programu poprzez naciśnięcie przycisku RD
UWAGA! Nawet gdy solar tracker nie wykonuje ruchów, odświeżając przyciskiem RD dane energia_trackera
się zwiększa. Nie wynika to z sumowania się energii zużywanej przez elektronikę, a z sumowania się
niedokładności obliczeń wynikającego z konstrukcji procesora.
5.
Aby zarejestrować pomiar wartości w czasie zmiennych widocznych w zakładce zmienne (czyli
domyślnej zakładce po uruchomieniu programu kombajn), należy nacisnąć zakładkę rejestracja
Strona
46
6.
W zaznaczonym polu podać zmienne, których przebiegi będą rejestrowane
7.
W oknie Registration time należy ustawić żądany czas rejestracji
8.
Następnym krokiem do uzyskania wykresu jest naciśnięcie przycisku Uruchom
Strona
47
9.
Wczytanie zarejestrowanych danych z procesora DSP do programu - funkcja Transfer
10. Funkcja Wykres - fst : wyświetlenie zarejestrowanych przebiegów
Zmienna energia_ogniwa jest energią oddaną do układu przez ogniwo. Zmienna
energia_trackera jest energią, która jest pobierana przez obrotnicę. Program nie uwzględnia
energii zużywanej przez elektronikę układu. Można jednak obliczyć jaką maksymalnie
energię może zużywać elektronika układu, żeby opłacało się z punktu widzenia
energetycznego uruchamiać śledzenie słońca (żeby energia oddana do sieci była większa niż
energia pobrana z sieci). W tym celu wykorzystać zmienne energia_ogniwa
i energia_trackera.
Strona
48
Program ćwiczenia
„Algorytmy śledzenia pozycji słońca”
1. Zapoznać się ze stanowiskiem laboratoryjnym,
2. Uruchomić układ śledzenia słońca;
3. Określić dokładność śledzenia słońca i ocenić wpływ strefy histerezy na pracę
układu,
4. Zbadać wpływ światła odbitego i rozproszonego.
5. Uruchomić układ programowego nadążania za słońcem. Sprawdzić i ocenić jego
działanie.
6. Policzyć co jaki czas musi być załączany mechanizm śledzenia aby strata energii
była mniejsza niż np. 1%, 2%, 5%. Jaki wpływ ma pora roku i godzina?
7. Zarejestrować moc oddawaną przez ogniwo oraz moc pobieraną przez układ
nadążania.
8. Wyznaczyć krytyczną wartość nasłonecznienia, przy której załączenie układu
nadążania za słońcem jest efektywne ekonomicznie.
9. Zbadać wpływ efektu częściowego przesłonięcia dla badanego ogniwa.
Strona
49
4. Źródła
[1]. Pancewicz Piotr „Dwuosiowy układ śledzenia słońca” - praca magisterska
[2]. Jastrzębska G., Odnawialne źródła energii i pojazdy proekologiczne, WNT, 2008
[3]. Krawiec F., Odnawialne źródła energii w świetle globalnego kryzysu energetycznego.
Wybrane problemy, Difin, 2010
[4]. Klugmann-Radziemska E., Fotowoltaika w teorii i praktyce, BTC, Legionowo, 2010
[5]. Frydrychowicz – Jastrzębska G., Rotman D., Optymalizacja pracy ogniwa
fotowoltaicznego, Przegląd Elektrotechniczny 04/2003
[6]. Szwedowski Ł., Efektywność algorytmów poszukiwania optymalnego położenia baterii
słonecznych, Politechnika Gdańska, 2009
[7]. Kudela W., Dwupłaszczyznowy układ sterowania nadążnego za Słońcem, Politechnika
Gdańska, 2008
[8]. Instrukcja do ćwiczenia laboratoryjnego „Badanie wpływu częściowego przesłonięcia na
charakterystyki ogniwa fotowoltaicznego” Politechnika Gdańska, 2009
[9]. www.pvs.agh.edu.pl/pl/ dostęp 04.04.2011
[10]. www.sunearthtools.com dostęp 05.04.2011
[11]. http://re.jrc.ec.europa.eu/pvgis/ dostęp 05.04.2011
[12]. www.solar-trackers.com/ dostęp 07.04.2011
[13]. http://wiadomosci.wp.pl/kat,1342,title,Odkrycie-polskich-naukowcowzrewolucjonizuje-swiat,wid,13291121,wiadomosc_prasa.html?ticaid=1c17b 07.04.2011
[14]. http://pl.wikipedia.org/wiki/Polaryzacja_fali dostęp 07.05.2011
[15]. www.fizyka.net.pl dostęp 07.05.2011
[16]. http://www.kubler.pl/ dostęp 16.05.2011
[17]. http://sklep.avt.com.pl/p/pl/481552/potencjometr+10kom2w.html dostęp 16.05.2011
[18]. http://sklep.avt.pl/p/pl/48997/wlacznik+zmierzchowy+zestaw+do+samodzielnego+mont
azu.html dostęp 16.05.2011
[19]. www.indel.pl dostęp 17.05.2011
[20]. http://www.politykaglobalna.pl/2009/08/desertec-pustynne-marzenia/ 07.06.2011
[21]. http://www.memorizer.pl/news/elektrownie-sloneczne-na-orbicie,74.html 07.06.2011
[22]. http://instruct1.cit.cornell.edu/Courses/ee476/FinalProjects/s2005/ 12.06.2011
[23]. http://www.label.pl/po/rek747.html 12.06.2011
[24]. " HELIOS -symulator pozornego ruchu Słońca, sterowany sterownikiem ADAM 5510"
[25]. http://www.reuk.co.uk/Effect-of-Temperature-on-Solar-Panels.htm 14.06.2011
Strona
50