Część 1
10. METODA SIŁ - RAMA
1
10.
10. METODA SIŁ - RAMA
Sposób rozwiązywania
przykładach liczbowych.
zadań
metodą
sił
przeanalizujemy
szczegółowo
na
konkretnych
Zadanie 1
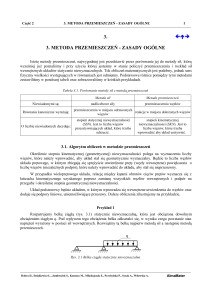
Wykonać wykresy sił wewnętrznych od obciążeń rzeczywistych układu statycznie niewyznaczalnego:
4
2
P = 54 kN
EJ
EJ
2 EJ
4
q = 9 kN/m
3
[m]
3
Rys. 10.1. Układ rzeczywisty z obciążeniem zewnętrznym
Układ jest dwukrotnie statycznie niewyznaczalny. Wybieramy jeden z możliwych układów
podstawowych. Odrzucamy myślowo dwie podpory prętowe (pozostawiając jedynie utwierdzenie) i
zastępujemy je niewiadomymi siłami X1 i X2.
4
2
P = 54 kN
X1
EJ
EJ
X2
2 EJ
4
q = 9 kN/m
3
3
[m]
Rys. 10.2. Układ podstawowy z niewiadomymi siłami X1 i X2
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
2
Aby układ ten był równoważny układowi rzeczywistemu należy go uzupełnić o układ równań
kanonicznych opisujących warunek identyczności kinematycznej:
{
11⋅X 112⋅X 2 1 P=0
21⋅X 1 22⋅X 2 2 P=0
(10.1)
W celu obliczenia przemieszczeń δik, wykonujemy wykresy momentów od sił jednostkowych
przyłożonych kolejno w miejsca niewiadomych X1 i X2, oraz od obciążenia zewnętrznego (rys. 10.2). Wykresy
te nazwiemy kolejno M1 (rys. 10.3), M2 (rys. 10.4), MP0 (rys. 10.5).
3
3
3
3
X1 = 1
X2 = 1
4
4
M1 [m]
M2 [m]
3
[m]
3
3
Rys. 10.3. Wykres momentów od siły jednostkowej
przyłożonej w miejsce niewiadomej X1
3
[m]
Rys. 10.4. Wykres momentów od siły jednostkowej
przyłożonej w miejsce niewiadomej X2
54
54
4
MP0 [kN/m]
126
3
1
2
[m]
Rys. 10.5. Wykres momentów od obciążenia zewnętrznego
Mając gotowe wykresy momentów możemy przystąpić do obliczania współczynników równań
kanonicznych (10.1) przy wykorzystaniu metody Maxwella-Mohra. Uwzględniając jedynie momenty zginające
przemieszczenie obliczamy ze wzoru:
ik =∑∫
j
MiMk
ds
EJ
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(10.2)
AlmaMater
Część 1
10. METODA SIŁ - RAMA
3
Dla uproszczenia całkowania skorzystamy z numerycznej metody Wereszczagina – Mohra
[
[
]
]
1
2
1
m3
⋅3 ⋅3 ⋅ ⋅3
[4 ⋅3 ⋅3]=27
2
3
2 EJ
EJ
1
2
1
m3
⋅3 ⋅3 ⋅ ⋅3
⋅[4 ⋅3 ⋅3 ]=27
2
3
2 EJ
EJ
3
1
m
12 =21 =−
[4 ⋅3 ⋅3]=−18
2 EJ
EJ
1
126 54
2 9 ⋅4 2
kNm 3
1 P =
⋅4 ⋅3 − ⋅
⋅4 ⋅3 =468
2 EJ
2
3 8
EJ
1
EJ
1
22 =
EJ
11 =
2 P=
[
[
]
] [
]
2
1 1
2
1
1
2 9 ⋅4
126 54
kNm
⋅1 ⋅54 ⋅ − ⋅3 − ⋅2
⋅
⋅4 ⋅3 −
⋅4 ⋅3 =−540
EJ 2
3
3
2 EJ 3 8
2
EJ
3
Układ równań kanonicznych przyjmuje postać:
{
27
18
468
⋅X 1 − ⋅X 2
=0
EJ
EJ
EJ
−18
27
540
⋅X 1 ⋅X 2 −
=0
EJ
EJ
EJ
Z rozwiązania powyższego układu równań otrzymamy następujące wyniki:
{
X 1 =−7,2 kN
X 2 =15,2 kN
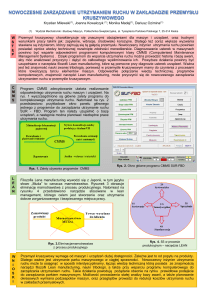
Warto przy tym zadaniu zastanowić się nad sensem wprowadzania niewiadomych w postaci grupy sił.
Rys. 10.6 przedstawia układ podstawowy dla tego zadania przyjęty jak poprzednio, z tą różnicą, że zamiast
niewiadomych sił X1 i X2 wprowadzono grupy sił Z1 i Z2.
4
2
P = 54 kN
EJ
Z1
Z1
Z2
Z2
2 EJ
4
q = 9 kN/m
3
3
[m]
Rys. 10.6. Układ podstawowy z niewiadomymi Z1 i Z2
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
4
Wykonajmy zatem ponownie wykresy momentów, tym razem od grup sił Z1 i Z2. Wykresy te nazwiemy
kolejno M1' (rys. 10.7) i M2' (rys. 10.8). Tym razem układ równań kanonicznych ma postać:
{
' 11⋅Z 1 ' 12⋅Z 2 ' 1 P=0
' 21⋅Z 1 ' 22⋅Z 2 ' 2 P=0
3
3
Z1 = 1
3
Z2 = 1
Z1 = 1
Z2 = 1
6
4
M1' [m]
4
M2' [m]
3
[m]
3
3
3
[m]
Rys. 10.8. Wykres momentów od sił jednostkowych
przyłożonych w miejsce niewiadomych Z2
Rys. 10.7. Wykres momentów od sił jednostkowych
przyłożonych w miejsce niewiadomych Z1
Przyglądając się wykresom M1' i M2' można zauważyć, że niektóre przemieszczenia będą zerowe.
Spróbujmy zatem sprawdzić czy nasze spostrzeżenia są słuszne i obliczmy ponownie przemieszczenia z
układu równań kanonicznych:
1
1
2
m3
2 ⋅ ⋅3 ⋅3 ⋅ ⋅3 =18
EJ
2
3
EJ
1 1
2 1
2
' 12 = 21 =
⋅3 ⋅3 ⋅ − ⋅3 ⋅3 ⋅ =0
EJ 2
3 2
3
1
1
m3
' 22 = ⋅18
⋅4 ⋅6 ⋅6 =90
EJ
2 EJ
EJ
1 1
1
2
kNm3
' 1 P=− ⋅ ⋅1 ⋅54 ⋅ ⋅2 ⋅3 =−72⋅
EJ 2
3
3
EJ
' 11 =
[
' 2 P=
[
]
]
72
1
1
2
9 ⋅4 2
kNm 3
−
⋅ 6 ⋅4 ⋅ ⋅12654− ⋅4 ⋅
⋅6 =1008
EJ 2 EJ
2
3
8
EJ
Po podstawieniu do równań kanonicznych otrzymujemy dwa równania z jedną niewiadomą:
{
18
72
⋅Z 0 ⋅Z 2 −
=0
EJ 1
EJ
90
1008
0 ⋅Z 1 ⋅Z 2
=0
EJ
EJ
Po rozwiązaniu równań otrzymujemy wyniki:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
5
{
Z 1 =4 kN
Z 2 =−11,2 kN
Wydaje się, że wyniki są różne, ale analizując rys. 10.2 i rys. 10.6 okazuje się, że niewiadome Xi są
odpowiednimi sumami zmiennych Zi:
X 1=Z 1 Z 2 =4−11,2=−7,2 kN
X 2=Z 1−Z 2 =4−−11,2=15,2 kN
czyli uzyskaliśmy takie same wyniki unikając rozwiązywania skomplikowanego układu równań.
4
2
P = 54 kN
EJ
7,2 kN
15,2 kN
2 EJ
4
q = 9 kN/m
3
3
[m]
Rys. 10.9. Stan obciążenia siłami zewnętrznymi oraz nadliczbowymi siłami X1 i X2
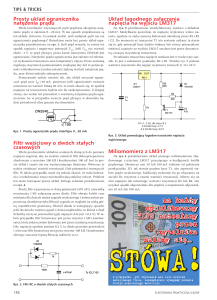
Po otrzymaniu wartości niewiadomych X1 i X2 dokonujemy analizy końcowej zadania, czyli tworzymy
wykresy rzeczywistych sił wewnętrznych w układzie podstawowym, obciążonym zewnętrznie oraz przez siły
X1 i X2 (rys. 10.9). Wartości sił wewnętrznych możemy określić w oparciu o zasadę superpozycji. Sumując
wykresy momentów w układach podstawowych od obciążenia zewnętrznego M0P (rys. 10.5) i wykresy
jednostkowe M1 (rys. 10.3), M2 (rys. 10.4) przemnożone przez rzeczywiste wartości nadliczbowych X1 i X2.
Podobnie możemy postąpić przy wyznaczaniu sił tnących i normalnych :
n
O
M n
P =M P ∑ M i⋅X i
i =1
n
T =T ∑ T i⋅X i
n
P
0
P
(10.3)
i =1
n
0
N n
P =N P ∑ N i⋅X i
i 1
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
6
21,6
8,4
13,2
30,4
4
MP(n) [kN/m]
58,8
3
1
2
Rys. 10.10. Wykres momentów rzeczywistych MP(n)
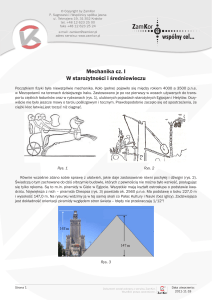
Ponieważ nie dysponujemy wykresami normalnych i tnących ani w układzie podstawowym, ani w
układach od stanów X1 = 1 i X2 = 1, wykresy tych funkcji możemy narysować tradycyjnie korzystając z
obciążeń na rys. 10.9 lub inaczej, korzystając z wykresu momentów w układzie statycznie niewyznaczalnym
(rys. 10.10). W tym celu dzielimy układ na pojedyncze pomocnicze fragmenty i dla nich pomocą wyznaczamy
wartości sił tnących w poszczególnych przekrojach.
21,6
Mp(n) [kNm]
8,4
30,4
2
1
8,4 kNm
Mp(n) [kNm]
3
54 kN
α
β
β
γ
α
γ
21,6 kNm
7,2 kN
15,2 kN
13,2 kNm
M
(n)
P
[kN/m]
13,2
δ
δ
4
q = 9 kN/m
x
58,8
58,8 kNm
Rys. 10.11. Rysunki pomocnicze do wykonania wykresu sił tnących
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
7
T =−15,2 [ kN ]
T =38,8 [ kN ]
T =−7,2 [kN ]
T =36 −9 x
38,8
+
_
-7,2
_
-15,2
4
TP(n) [kN]
+
36,0
3
1
2
Rys. 10.12. Wykres rzeczywistych sił tnących TP(n)
Wartości sił normalnych można wyznaczyć równoważąc węzły układu (równowaga sił w węzłach)
7,2 kN
38,8 kN
Nδ
Rys. 10.13. Równowaga sił w węźle ramy
∑ Y =0
-46,0
N =−46 kN
_
4
NP(n) [kN]
3
1
2
Rys. 10.14. Wykres rzeczywistych sił normalnych NP(n)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
8
10.1. Sprawdzenia poprawności obliczeń
10.1.1. Sprawdzenie globalne
Sprawdzenie to polega na zbudowaniu pewnego fikcyjnego wykresu momentów MS, będącego sumą
wszystkich wykresów jednostkowych ( M1, M2, ..., Mi):
n
M S =∑ M i
(10.4)
i =1
Na podstawie tak sporządzonego wykresu obliczamy współczynnik δSS ze wzoru:
M 2S
SS =∫
⋅ds
EJ
(10.5)
Okazuje się że wartość współczynnika δSS równa jest sumie wszystkich współczynników macierzy podatności:
n
n
SS =∑ ∑ ik
(10.6)
i =1 k=1
Można to udowodnić w następujący sposób:
M S⋅M S
1
⋅ds=∫ ⋅M 1M 2...M n 2⋅ds
EJ
EJ
S
S
M 1⋅M 1
M 1⋅M 2
M ⋅M n
=∫
⋅ds ∫
⋅ds...∫ 1
⋅ds
EJ
EJ
EJ
S
S
S
M ⋅M 1
M ⋅M 2
M ⋅M n
∫ 2
⋅ds ∫ 2
⋅ds...∫ 2
⋅ds
EJ
EJ
EJ
S
S
S
M ⋅M
M ⋅M
M ⋅M
∫ n 1⋅ds ∫ n 2⋅ds...∫ n n⋅ds=
EJ
EJ
EJ
S
S
S
SS =∫
n
n
=11 12 ...nn =∑ ∑ ik
i =1 k =1
W ten sposób otrzymaliśmy możliwość sprawdzenia poprawności wyliczeń wszystkich uzyskanych
współczynników δik (z pominięciem ΔiP). Jeżeli powyższa równość jest spełniona przeprowadzone dotychczas
obliczenia są prawidłowe. Jeżeli nie, to lokalizujemy błąd sprawdzeniem lokalnym.
10.1.2. Sprawdzenie lokalne
Sprawdzenie to, zwane także wierszowym lub kolumnowym, polega na zlokalizowaniu błędu, przez
odrębne rozpatrywanie elementów danego wiersza macierzy podatności (lub danej kolumny, bo macierz ta jest
symetryczna). Sumowania te wyrażone są wzorem:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
is =∫
S
9
n
M i⋅M S
ds=∑ ik
EJ
k =1
(10.7)
Gdzie i to numer wykresu jednostkowego (dla Xi = 1) oraz numer sprawdzanego wiersza macierzy.
Sprawdzenie poprawności wartości obliczeń wyrazów wolnych ΔiP przeprowadza się wzorem:
n
M 0S⋅M 0P
SP=∫
ds=∑ iP
EJ
i =1
S
(10.8)
Dowód na skuteczność zależności (10.7) i (10.8) jest analogiczny jak dla sprawdzenia globalnego.
Po zlokalizowaniu i poprawieniu błędu przystępujemy do dalszej analizy wyników.
10.1.3. Sprawdzenie wartości niewiadomych sił
Sprawdzenie to polega na podstawieniu wyznaczonych wielkości Xk do równań kanonicznych i
stwierdzeniu, czy układ równań jest spełniony.
10.1.4. Sprawdzenie statyczne
To sprawdzenie mówi nam, czy przy wyznaczonych siłach wewnętrznych spełnione są warunki
statycznej równowagi (ΣX=0, ΣY=0, ΣM=0). Polega ono na wykazaniu, że spełnione są równania równowagi
dla całości układu jak również dla wybranych jego części. Warto zaznaczyć, że sprawdzenie to nie bada
poprawności wyliczonych Xk, a jedynie sprawdza poprawność wykresów sił wewnętrznych od obciążeń
zewnętrznych i nadliczbowych (niekoniecznie prawidłowych).
10.1.5. Sprawdzenie kinematyczne
Sprawdzenie to jest najważniejsze, gdyż tak naprawdę to dopiero ono mówi nam czy uzyskane wyniki
są prawidłowe. Polega ono na wykazaniu, że dla wybranych punktów (na ogół punktów, które nie doznają
przemieszczeń w układzie statycznie niewyznaczalnym) przemieszczenia są równe wartościom rzeczywiście
tam występującym.
Zagadnienie wyznaczania przemieszczeń w układach statycznie niewyznaczalnych wydaje się
stosunkowo złożone, gdyż zgodnie z uniwersalną zasadą pracy wirtualnej w celu określenia przemieszczenia,
należy znaleźć wykresy sił wewnętrznych w układzie statycznie niewyznaczalnym zarówno dla stanu
rzeczywistego jak i wirtualnego.
1⋅ j =∑∫
S
M Pn⋅M n
⋅ds
EJ
Żeby uzyskać wykres momentów od obciążeń zewnętrznych trzeba było rozwiązać układ równań
kanonicznych.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
10
n
∑ ik⋅X k iP=0
(10.9)
k =1
Podobnie w celu stworzenia wykresu momentów wirtualnych w układzie statycznie niewyznaczalnym
musimy najpierw wyznaczyć reakcje nadliczbowe:
n
∑ ik⋅X k iP=0
k =1
iP Obliczamy mnożąc wykres ze stanu X1 i wykres momentów od obciążenia wirtualnego w
układzie podstawowym.
10.2. Twierdzenia redukcyjne
W celu obliczenia dowolnego przemieszczenia w układzie statycznie niewyznaczalnym należy
wykorzystać zasadę prac wirtualnych wprowadzając do równania funkcje sił wewnętrznych, wynikających z
obciążenia wirtualnego oraz z obciążenia rzeczywistego. Jednak można jedną z tych funkcji (wirtualną lub
rzeczywistą) wyznaczyć stosując dowolny układ podstawowy (statycznie wyznaczalny).
1⋅n=∑∫
S
M Pn⋅M n
M Pn⋅M 0
M P0⋅M n
⋅ds=∑∫
⋅ds=∑∫
⋅ds
EJ
EJ
EJ
S
S
(10.10)
Zadanie 2
Wyznaczyć przemieszczenie pionowe punktu znajdującego się w miejscu przyłożenia siły P
(rys. 10.1) stosując trzy różne układy podstawowe (statycznie wyznaczalne) dla obciążenia wirtualnego.
a) Przy wykorzystaniu zależności (10.10) do rozwiąznia potrzebne nam będą dwa wykresy: wcześniej
sporządzony wykres momentów rzeczywistych MP(n) z rys. 10.10, oraz wykres momentów w przyjętym
układzie podstawowym obciążonym siłą wirtualną (po kierunku poszukiwanego przemieszczenia).
21,6
8,4
13,2
EJ
2
3
30,4
4
MP(n) [kN/m]
58,8
[m]
1
2
1
3
2 EJ
M
3
1
0
4
[m]
2
3 3
1
2
[m]
Przemieszczenie wyznaczamy korzystając z twierdzenia redukcyjnego:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
1⋅n
P =∑∫
[
S
0
M n
P ⋅M
⋅ds
EJ
11
]
19,33 3
1 1
2 2
1
1
2 2
= ⋅ ⋅1 ⋅ ⋅ ⋅30,4 − ⋅8,4 ⋅2 ⋅ ⋅ ⋅30,4 =
EJ 2
3 3
3
2
3 3
EJ
n
P
b) Obliczamy przemieszczenie po przyjęciu innego układu podstawowego dla obciążenia wirtualnego
21,6
8,4
13,2
EJ
1
1
1
30,4
4
MP(n) [kN/m]
3
2 EJ
4
0
M [m]
58,8
3
4
[m]
1
2
3
3
1
[m]
2
Przemieszczenie wyznaczone ze wzoru (10.10) ma wartość :
1⋅n
P =∑∫
[
S
0
M n
P ⋅M
⋅ds
EJ
]
19,33 3
1 1
2
1
1
2
= ⋅ ⋅1 ⋅1 ⋅ ⋅8,4 − ⋅30,4 ⋅3 ⋅1 ⋅ ⋅21,6 =
EJ 2
3
3
2
3
EJ
n
P
c) Na koniec sprawdzamy rachunki dla jeszcze innego układu podstawowego:
21,6
8,4
13,2
EJ
30,4
4
MP(n) [kN/m]
1
1
1
2 EJ
4
0
M [m]
58,8
3
[m]
1
2
3
1
[m]
2
Wartość przemieszczenia wyznaczamy mnożąc i całkując powyższe wykresy :
1⋅n
P =∑∫
[
1 1
2
1
= ⋅ ⋅1 ⋅1 ⋅ ⋅8,4 − ⋅30,4
EJ 2
3
3
n
P
]
S
[
0
M n
P ⋅M
⋅ds
EJ
]
19,33 3
1
1
2 9 ⋅4 2
⋅ ⋅58,8−13,2⋅4 ⋅1 − ⋅
⋅4 ⋅1 =
2 EJ 2
3
8
EJ
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
12
We wszystkich przypadkach otrzymaliśmy identyczne wartości przemieszczeń co dowodzi, że układ
podstawowy może być przyjęty dowolnie.
10.2.1. Dowód pierwszego twierdzenia redukcyjnego
Dowód twierdzenia przytoczymy uwzględniając w obliczeniach przemieszczeń jedynie wpływ
momentów zginających. Spróbujemy dowieść prawdziwości twierdzenia:
M Pn⋅M n
M Pn⋅M 0
⋅ds=
∑∫ EJ
∑∫ EJ ⋅ds
S
S
(10.11)
Zgodnie z zasadą superpozycji można zapisać, że :
0
M n
P =M P X 1 ⋅M 1 X 2 ⋅M 2 ... X n⋅M n
M n=M 0 X 1 ⋅M 1 X 2 ⋅M 2 ... X n⋅M n
(10.12)
n
Funkcje M p i M n podstawiamy do wyrażenia pod pierwszą całką:
M nP ⋅M n=M 0P X 1 ⋅M 1 X 2 ⋅M 2 ... X n M n ⋅M 0 X 1 ⋅M 1 X 2 ⋅M 2 ... X n M n =
=M 0 ⋅M 0
P X 1 ⋅M 1 X 2 ⋅M 2 ... X n M n
0
X 1⋅M P ⋅M 1 X 1 ⋅M 12 X 2 ⋅M 2 ⋅M 1 ... X n M n M 1
X 2 ⋅M 0P ⋅M 2 X 1⋅M 1 ⋅M 2 X 2 ⋅M 2⋅M 2 ... X n M n M 2 ...
2
X n⋅M 0
P ⋅M n X 1 ⋅M 1 ⋅M n X 2 ⋅M 2 ⋅M n ...M n ⋅X n
(10.13)
Biorąc pod uwagę, że całka z iloczynu momentów podzielonego prze sztywność jest odpowiednim
przemieszczeniem :
11 =∫
M 12
⋅ds
EJ
22 =∫
M2
⋅ds
EJ
nn =∫
M 2n
⋅ds
EJ
S
S
S
2
M 1 ⋅M 2
⋅ds
EJ
S
M 1 ⋅M n
1 n = n1 =∫
⋅ds
EJ
S
M ⋅M n
2 n = n2 =∫ 2
⋅ds
EJ
S
(10.14)
12 = 21 =∫
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(10.15)
AlmaMater
Część 1
10. METODA SIŁ - RAMA
1 P=∫
S
13
M 1 ⋅M 0P
⋅ds
EJ
M 2 ⋅M 0P
2 P=∫
⋅ds
EJ
S
nP =∫
S
(10.16)
M n⋅M 0P
⋅ds
EJ
Wykorzystując to we wzorze (10.13) zapiszemy:
n
M n
P ⋅M
⋅ds= X 1 ⋅ X 1 ⋅11 X 2 ⋅12 .. X n⋅1 n 1 P
EJ
S
X 2 ⋅ X 1 ⋅ 21 X 2 ⋅ 22 ... X n⋅ 2 n 2 P
1 ⋅ j =∫
X n⋅ X 1 ⋅n1 X 2 ⋅n2 ... X n⋅nn nP ∫
S
0
M ⋅M
EJ
n
P
(10.17)
⋅ds
Na mocy równań kanonicznych metody sił, wartości w nawiasach są równe zeru. Ostatecznie
twierdzenie (10.11) zostało udowodnione.
1 ⋅ j =∫
S
n
0
M ⋅M
M ⋅M
⋅ds=∫ P
⋅ds
EJ
EJ
S
n
n
(10.18)
10.2.2. Dowód drugiego twierdzenia redukcyjnego
W celu obliczenia dowolnego przemieszczenia w układzie statycznie niewyznaczalnym, wystarczy
rozwiązać układ ten od obciążenia wirtualnego, zaś rzeczywisty stan obciążeń określić dla dowolnego układu
podstawowego statycznie wyznaczalnego.
1 ⋅ j =∫
S
n
M n
M 0 ⋅M n
P ⋅M
⋅ds=∫ P
⋅ds
EJ
EJ
S
(10.19)
Warto zaznaczyć, że dzięki twierdzenia redukcyjnemu w rozważanym układzie można przeprowadzić
bardzo dużo sprawdzeń kinematycznych, gdyż możemy przyjąć wiele różnych układów podstawowych.
Reasumując, kontrole kinematyczną najlepiej przeprowadzać stosując inny układ podstawowy niż
wykorzystywany przy liczeniu niewiadomych, ponieważ efektem tego sprawdzenia byłoby tylko wykazanie
poprawności równania kanonicznego.
Uwzględniając w obliczeniach przemieszczeń jedynie wpływ momentów zginających udowodnimy
twierdzenie redukcyjne w postaci:
n
M n
M 0P ⋅M n
P ⋅M
1 ⋅ j =∫
⋅ds=∫
⋅ds
EJ
EJ
S
S
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
14
Zgodnie z zasadą superpozycji moment w układzie statycznie niewyznaczalnym jest równy:
0
M n
P =M P X 1 ⋅M 1 X 2 ⋅M 2 ... X n⋅M n
M n=M 0 X 1 ⋅M 1 X 2 ⋅M 2 ... X n⋅M n
n
Funkcje M P i M n podstawiamy do wyrażenia podcałkowego:
n
0
M n
=M 0
P ⋅M
P X 1 ⋅M 1 X 2 ⋅M 2 ... X n M n ⋅M P X 1 ⋅M 1 X 2 ⋅M 2 ... . X n M n =
=M 0p⋅M 0 X 1 ⋅M 1 X 2 ⋅M 2 .... X n M n
X 1 ⋅M 0⋅M 1 X 1 ⋅M 12 X 2 ⋅M 2 ⋅M 1 .... X n M n M 1
(10.20)
0
X 2 ⋅M ⋅M 2 X 1 ⋅M 1⋅M 2 X 2⋅M 2 ⋅M 2 .... X n M n M 2 ...
X n⋅M 0⋅M n X 1 ⋅M 1 ⋅M n X 2 ⋅M 2 ⋅M n ...M n2 ⋅X n
Biorąc pod uwagę wyrażenia (10.14), (10.15), (10.16) oraz (10.20) otrzymamy :
n
M n
P M
ds= X 1 ⋅ X 1 ⋅11 X 2⋅12 .. X n⋅1 n 1 P
EJ
S
X 2 ⋅ X 1 ⋅ 21 X 2 ⋅ 22 ... X n⋅ 2 n 2 P
1 ⋅ j =∫
X n⋅ X 1⋅ n1 X 2 ⋅n2 ... X n⋅ nn nP ∫
S
0
P
M ⋅M
EJ
(10.21)
n
⋅ds
Na mocy równań kanonicznych metody sił, wartości w nawiasach są równe zeru.
Po ich wyeliminowaniu otrzymujemy twierdzenie redukcyjne:
1 ⋅ j =∫
S
n
M n
M 0 ⋅M n
P ⋅M
⋅ds=∫ P
⋅ds
EJ
EJ
S
Zadanie 3
Dokonać sprawdzenia obliczeń układu statycznie niewyznaczalnego z rys. 10.1
Obliczone wcześniej przemieszczenia (współczynniki macierzy podatności) mają wartość:
18
EJ
1 2 = 2 1 =0
90
2 2=
EJ
−72
1 P =
EJ
1008
2 P=
EJ
1 1 =
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
15
a) Sprawdzenie globalne
Sumujemy wykresy Z1 i Z2 aby otrzymać wykres Ms.
3
3
Z1 = 1
Z1 = 1
3
Z2 = 1
Z2 = 1
6
4
M1' [m]
6
6
Ms [m]
M2' [m]
3
[m]
3
4
4
3
[m]
3
3
1
2
[m]
Rys. 10.17. Zestawienie wykresów momentów od stanu Z1 i Z2
Przy wykorzystaniu wzoru (10.5) otrzymujemy wartość współczynnika δSS.
SS =
1
1
2
1
108
⋅ ⋅6 ⋅3 ⋅ ⋅6
⋅6 ⋅4 ⋅6 =
EJ 2
3
2 EJ
EJ
Aby sprawdzić nasze obliczenia według (10.6) musimy znaleźć jeszcze drugą stronę równania:
n
n
108
=
∑ ∑ ik =1 11 22 12 2= 180090
EJ
EJ
i =1 k =1
Sprawdzenie globalne jest spełnione ponieważ :
n
n
SS =∑ ∑ ik
i =1 k=1
108 108
=
EJ
EJ
b) Sprawdzenia lokalne
6
3
Z1 = 1
Z1 = 1
6
4
Ms [m]
M1' [m]
3
4
3
[m]
3
1
2
[m]
Rys. 10.18. Wykres momentów w stanie M'1 i Ms
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
16
Dla rozważanego przykładu suma współczynników pierwszego wiersza macierzy podatności wynosi:
n
18
=
∑ 1 k =1 11 2 = 180
EJ
EJ
k=1
Aby sprawdzić obliczenia musimy znaleźć jeszcze wartość współczynnika δ1S. W tym celu należy przemnożyć
wykresy M1' i MS.
1 S =∫
S
[
]
M 1 ⋅M S
1 1
2
18
ds=
⋅3 ⋅3 ⋅ ⋅6 =
EJ
EJ 2
3
EJ
Ponieważ:
2
iS =
18
18
=∑ =
EJ k =1 1 k EJ
Równanie (10.7) jest spełnione dla wiersza pierwszego.
W celu sprawdzenia kolumny wyrazów wolnych, zgodnie ze wzorem (10.8) obliczamy sumę:
n
1008 936
=
∑ k P=1 P2 P= −72 EJ
EJ
k =1
A następnie współczynnik ΔSP na podstawie wykresów:
54
6
54
6
4
4
MP [kN/m]
Ms [m]
126
3
1
2
[m]
3
1
2
[m]
Rys. 10.19. Wykres momentów w stanie P i Ms
SP =∫
S
[
]
M S⋅M P
1
54 126
2 9 ⋅4 2
936
ds=
⋅4 ⋅6 − ⋅
⋅4 ⋅6 =
EJ
2 EJ
2
3 8
EJ
Równanie (10.8) jest spełnione ponieważ:
SP =∫
S
n
M S⋅M P
ds=∑ iP
EJ
i =1
936 936
=
EJ
EJ
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
17
c) Sprawdzenie wartości niewiadomych sił
Aby upewnić się, że układ równań został poprawnie rozwiązany należy wartości niewiadomych Xi
podstawić do równań:
{
−72
18
0
⋅4 ⋅−11,2
=0
EJ
EJ
EJ
0
90
1008
⋅4 ⋅−11,2
=0
EJ
EJ
EJ
{00 =0
=0
Wartości nadliczbowych spełniają układ równań.
d) Sprawdzenie statyczne
Dysponując wszystkimi siłami wewnętrznymi odcinamy myślowo ramę od podpór i przykładamy siły
przypodporowe (reakcje).
P = 54 kN
K
7,2 kN
15,2 kN
4
q = 9 kN/m
36 kN
58,8 kNm
3
46 kN
1
2
[m]
Rys. 10.20. Rama “zawieszona” na wewnętrznych siłach przypodporowych
Obciążenie zewnętrzne wraz z reakcjami musi spełniać równania równowagi.
∑X:
∑Y:
∑M:
9 ⋅4 −36=0
⇒ 0=0
−7,2 −5415,2 46 =0
⇒ 0=0
−58,8 −7,2 ⋅3 9 ⋅4 ⋅2 54 ⋅1 −15,2 ⋅3=0
⇒ 0=0
e) Sprawdzenie kinematyczne
Skorzystamy z twierdzenia redukcyjnego i obliczymy przemieszczenie mnożąc rzeczywisty wykres
momentów MP(n) przez wykres wirtualny utworzony w nowym układzie podstawowym.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
18
Żeby dokonać sprawdzenia musimy policzyć znane przemieszczenie. W układzie podstawowym na
rys. 10.21 znamy przemieszczenie pionowe i kąt obrotu przekroju w dolnej podporze. W rzeczywistości jest
tam utwierdzenie, tak więc wszystkie przemieszczenia są równe zero. Liczymy kąt obrotu przekroju
(przykładamy wirtualny moment):
21,6
8,4
13,2
0,5 EJ
0,5
1
1
30,4
6
4
MP(n) [kN/m]
1
[m]
2
6
4
1 [-]
0
M [m]
58,8
3
1
2 EJ
3
1
2
[m]
Rys. 10.21. Wykresy momentów zginających od: obciążenia rzeczywistego w układzie rzeczywistym (statycznie
niewyznaczalnym) oraz od jedynkowej siły w innym układzie podstawowym
Uwzględniając tylko wpływ momentów otrzymujemy:
1 ⋅=
[
1
1 1 2 1
1
2 1
⋅1 ⋅30,4 ⋅ ⋅ ⋅ ⋅2 ⋅30,4 ⋅ ⋅
2
3 2 3 3
2
3 3
1 1
2 1 1
2 1 1 1
⋅ ⋅3 ⋅21,6 ⋅ ⋅ − ⋅1 ⋅8,4 ⋅ ⋅ ⋅
EJ 2
3 2 2
3 2 3 3
[
2
]
]
1
1
1
2 9 ⋅4
0
⋅ − ⋅4 ⋅58,8 ⋅1 ⋅4 ⋅13,2 ⋅1 ⋅
⋅4 ⋅1 =
=0 rad
2 EJ
2
2
3
8
EJ
Wynik jest poprawny.
10.3. Metoda sił dla innych typów obciążeń
Podstawową różnicą pomiędzy obliczaniem układów statycznie wyznaczalnych a niewyznaczalnych jest
to, że w tych drugich obciążenia takie jak: temperatura, osiadanie czy błąd montażu wywołują obok
przemieszczeń konstrukcji także siły wewnętrzne. Dlatego obciążenia te należy uwzględnić w wyrazach
wolnych w równaniach kanonicznych, tzn. δik pozostaje bez zmian, natomiast w zależności od obciążenia ΔiP
zastępuje się następującymi wielkościami:
10.3.1. Wpływ temperatury
i t =
t⋅ t
⋅∫ M i⋅ds∫ N i⋅t⋅t 0⋅ds
h
(10.22)
gdzie :
αt - współczynnik rozszerzalności termicznej,
Δt - różnica temperatur,
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
19
to - równomierne ogrzanie,
h - wysokość przekroju,
Mi i Ni - wykresy sił wewnętrznych dla stanu Xi =1,
αt, Δt, to są takie same jak dla układów statycznie wyznaczalnych.
Równanie kanoniczne przyjmie postać:
n
∑ ik⋅X k it =0
(10.23)
k=1
10.3.2. Wpływ osiadania podpór
i =−∑ Ri⋅i −∑ M i⋅i
i
i
(10.24)
gdzie:
Δi - przemieszczenie liniowe podpory,
φi - przemieszczenie kątowe podpory,
Ri i Mi - reakcje po kierunkach przemieszczanych podpór.
Równanie kanoniczne przyjmie postać:
n
∑ ik⋅X k i =0
(10.25)
k =1
10.3.3. Wpływ błędów montażu
i m=∑ B i m⋅bi m
i
(10.26)
gdzie:
bim - błąd w wymiarze elementu (np. pręt zbyt długi),
Bim - siła wewnętrzna po kierunku błędnego wymiaru (np. siła normalna).
Równanie kanoniczne przyjmie postać:
n
∑ ik⋅X k i m=0
(10.27)
k =1
Uwaga!
Gdy wpływem zewnętrznym jest temperatura, osiadanie podpór lub błędy montażu zadanie jest
rozwiązywalne tylko przy znanym EJ, EA, GA. Wyrazy wolne Δit, ΔiΔ, Δim nie są wyrażone przez sztywność
dlatego też nie można pominąć sztywności we współczynnikach δik.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
20
Zadanie 4
Obliczyć siły wewnętrzne w analizowanej ramie, wywołane działaniem temperatury (pominiemy wpływ
równomiernego ogrzania) oraz osiadaniem podpór.
-5 oC
EJ
25 oC
35 oC
2 EJ
0,015 [m]
4
0,01 rad
3
[m]
3
Rys. 10.22. Układ rzeczywisty obciążony temperaturą i osiadaniem podpór
Do obliczeń przyjmujemy układ podstawowy, który daje prostszą postać macierzy podatności:
-5 oC
EJ
Z1
Z1
Z2
25 C
o
35 oC
Z2
2 EJ
4
0,015 [m]
0,01 rad
3
3
Rys. 10.23. Układ podstawowy z niewiadomymi Z1 i Z2
W zadaniu przyjęto:
•
współczynnik rozszerzalności termicznej jak dla stali:
t =1,2 ⋅10−5
•
1
˚C
ramę wykonaną z profili stalowych
rygiel ramy I200
słup ramy 2 I200
o następujących parametrach:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
E =206,01 GPa=206,01 ⋅10
6
21
kN
m2
J x =2140 ⋅10−8 m4
E⋅J =4408,614 kN⋅m2
Ponieważ układ podstawowy przyjęto jak w poprzednim zadaniu możemy skorzystać z wykonanych
wcześniej wykresów:
3
3
Z1 = 1
Z1 = 1
3
Z2 = 1
6
4
M1' [m]
Z2 = 1
4
M2' [m]
3
3
[m]
3
3
[m]
Rys. 10.24. Wykresy momentów zginających w układzie podstawowym pochodzące kolejno od: siły jedynkowej
przyłożonej w miejsce niewiadomej Z1 i siły jedynkowej przyłożonej w miejsce niewiadomej Z2
i wcześniej obliczonych wartości niektórych współczynników:
1
1
2
m3
2 ⋅ ⋅3 ⋅3 ⋅ ⋅3 =18
EJ
2
3
EJ
1 1
2 1
2
12 = 21 =
⋅3 ⋅3 ⋅ − ⋅3 ⋅3 ⋅ =0
EJ 2
3 2
3
1
1
m3
22 = ⋅18
⋅4 ⋅6 ⋅6 =90
EJ
2 EJ
EJ
11 =
a) Obciążenie teperaturą
W układzie równań kanonicznych:
{
11⋅Z 1 12⋅Z 2 1 t =0
21⋅Z 1 22⋅Z 22 t =0
brakuje jeszcze wyrazów wolnych. Obliczamy je według wzoru (10.22) pomijając wpływ t0.
1,2 ⋅10−5 3 ⋅3
3 ⋅3
⋅
⋅40
⋅30 =0,0189 m
0,20
2
2
1,2 ⋅10−5 3 ⋅3
3 ⋅3
2 t =
⋅
⋅40
⋅306 ⋅4 ⋅10 =0,0171 m
0,20
2
2
1 t =
Jeżeli cały układ równań pomnożymy przez EJ współczynniki δik będą liczbami, a wyrazy wolne będą miały
wartość:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
22
E⋅J⋅1 t =0,0189 ⋅4408,614 =83,232 kN⋅m3
E⋅J⋅2 t =0,0171 ⋅4408,614 =75,387 kN⋅m3
Układ równań kanonicznych przyjmie więc postać:
{
18⋅Z 1 83,323 =0
90 ⋅Z 2 75,387 =0
Z powyższego układu rownań otrzymano wyniki:
{
Z 1 =−4, 629 kN
Z 2 =−0,838 kN
W miejscu usuniętych podpór działają odpowiednie sumy sił Zi:
Z 1 Z 2 =−5,467 kN
Z 1 −Z 2 =−3,791 kN
Aby uzyskać wykres momentów od temperatury obciążamy ramę tylko siłami nadliczbowymi Zi.
16,401
5,467 kN
11,373
5,028
3,791 kN
4
Mt(n) [kNm]
3
3
[m]
Rys. 10.25. Wykresy momentów zginających od temperatury w układzie rzeczywistym (statycznie niewyznaczalnym)
Kontrolę kinematyczną przeprowadzimy mnożąc wykres rzeczywisty Mt(n) przez wykres wiryualny M 0 .
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
23
0,5 EJ
0,5
1
1
6
2 EJ
0
1 [-]
M [m]
3
1
1
4
6
2
[m]
Rys. 10.26. Wykresy momentów zginających od: jedynkowej siły wirtualnej w innym układzie podstawowym
Licząc wartość przemieszczenia należy pamiętać o wpływie temperatury (wpływ t0 pominięto):
1 ⋅=∑
t⋅ t
M n ⋅M 0
⋅∫ M 0 ⋅ds∑∫ t
⋅ds
h
EJ
(10.28)
Wykres momentów Mt(n) jest poprawny jeśli przemieszczenie bedzie zerowe.
1
1 1 2
1,2 ⋅10−5⋅40
1
1 −1 2
1,2 ⋅10−5⋅30
1 ⋅= ⋅3 ⋅ ⋅
⋅ ⋅16,401 −
⋅3 ⋅ ⋅
⋅ ⋅11,373
2
2 EJ 3
0,20
2
2 EJ 3
0,20
4 ⋅1 ⋅
−5
5,028 1,2 ⋅10 ⋅10
−
=0,000001 ≈0 rad
2 EJ
0,20
Wykresy sił tnących i normalnych również wykonujemy tylko od sił Zi.
3,791
+
_
-5,467
4
Tt(n) [kN]
3
3
Rys. 10.27. Wykres rzeczywistych sił tnących Tt(n)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
-9,258
24
_
4
Nt(n) [kN]
3
3
Rys. 10.28. Wykres rzeczywistych sił normalnych Nt(n)
Warto zwrócić uwagę, że wykresy momentów zginających odłożone są po stronie zimniejszej, co
wynika z istnienia (działania) dodatkowych więzów. W układach statycznie wyznaczalnych zawsze rozciągane
były włókna cieplejsze.
b) Obciążenie osiadaniem podpór
Podobnie jak w przypadku temperatury do rozwiązania układu równań brakuje wartości wyrazów
wolnych ΔiΔ. Obliczamy je na podstawie pracy reakcji w stanach jednostkowych.
EJ
EJ
Z1
Z1
2 EJ
0,015 [m] 4
0,01 rad
M=0
3
Z2
Z2
2 EJ
0,01 rad
M=6
R=2
3
0,015 [m] 4
R=0
3
3
Rys. 10.29. Reakcje w podporach od stanów Z1 oraz Z2
1 =−−0,015 ⋅1 =0,015 m
2 =−0,015 ⋅1 −6 ⋅0,01=0,045 m
Cały układ równań mnożymy przez EJ, stąd wartości wyrazów wolnych:
E⋅J⋅1 =0,015 ⋅4408,614 =66,129 [ kN⋅m3 ]
E⋅J⋅ 2 =0,045 ⋅4408,614 =198,388 [kN⋅m3 ]
Układ równań kanonicznych przyjmie więc postać:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
25
{
18⋅Z 1 66,129 =0
90 ⋅Z 2 198,388 =0
Z powyższego układu rownań otrzymano wartości nadliczbowych sił:
{
Z 1 =−3,674 kN
Z 2 =−2,204 kN
A po zsumowaniu wartości nadliczbowych reakcji:
Z 1 Z 2 =−5,878 kN
Z 1 −Z 2 =−1,470 kN
Obciążając układ podstawowy tylko wyliczonymi siłami możemy narysować wykres momentów
zginających od obciążenia rzeczywistego w układzie rzeczywistym (statycznie niewyznaczalnym).
17,634
4,410
13,224 1,470 kN
5,878 kN
4
MΔ(n) [kNm]
3
3
[m]
Rys. 10.30. Wykres momentów zginających od obciążenia osiadaniem podpór w układzie rzeczywistym
Kontrola kinematyczna – sprawdzenie wykresu momentów MΔ(n).
Aby wyznaczyć dowolne przemieszczenie w układzie, którego podpory osiadają trzeba uwzględnić
pracę reakcji wirtualnych na rzeczywistych przemieszczeniach.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
26
0,5 EJ
EJ
0,5
1
1
2 EJ
0,015 [m] 4
0,01 rad
2 EJ
6
[m]
3
6
4
1 [-]
0
M [m]
3
1
3
1
2
[m]
Rys. 10.31. Układ rzeczywisty poddany obciążeniu osiadaniem; wykres momentów zginających od jedynkowej siły
wirtualnej w innym układzie podstawowym
Korzystamy z wzoru:
1 ⋅=−∑ R0⋅∑∫
n
0
M ⋅M
⋅dx
EJ
(10.29)
Podstawiając wartości nadliczbowe otrzumujemy przemieszczenie o wartości bliskiej zeru co znaczy, że
sprawdzany wykres jest poprawny.
1 1
1 2
1
1 2
⋅ ⋅3 ⋅ ⋅ ⋅17,634 − ⋅3 ⋅ ⋅ ⋅4,410
EJ 2
2 3
2
2 3
1
1
⋅ 4 ⋅1 ⋅13,224 − 1 ⋅0,01 − ⋅0,015 =−0,000001 rad ≈0 rad
2 EJ
6
1 =
Wykresy sił tnących i normalnych w układzie rzeczywistym powstają tylko od sił Zi.
1,470
+
_
-5,878
4
TΔ(n) [kN]
3
3
Rys. 10.32. Wykres rzeczywistych sił tnących TΔ(n)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
10. METODA SIŁ - RAMA
-7,348
_
27
4
NΔ(n) [kN]
3
3
Rys.10.33. Wykres rzeczywistych sił normalnych NΔ(n)
10.4. Projektowanie konstrukcji metodą sił
Zaprojektować konstrukcję tzn. przyjąć przekroje elementów (np. prętów, słupków rygli ram, itp.) w
taki sposób by spełnić warunek dopuszczalności, nie przekroczyć nośności elementów lub dopuszczalnych
ugięć.
∣M eks.∣
≤ dop.
W
f eks. f dop.
(10.30)
gdzie:
Meks. - maksymalny moment zginający w elemencie,
W
- wskaźnik wytrzymałości przekroju,
σdop. - dopuszczalne naprężenia przy zginaniu,
feks. - ekstremalne ugięcie elementu,
fdop. - dopuszczalne ugięcie (przemieszczenie).
Przystępując do projektowania zakładamy pewne przekroje elementów. Jeżeli po przeprowadzeniu
obliczeń okazuje się, że przyjęte przekroje nie spełniają naszych założeń wytrzymałościowych, ekonomicznych
bądź innych, to jesteśmy zmuszeni zmienić wymiary przekroi. Przyjmując w konstrukcji inne przekroje
musimy ponownie rozwiązać układ metodą sił, ponieważ zmiana sztywności prętów pociągnęła za sobą
zmianę macierzy podatności (δik) oraz wektora wyrazów wolnych (ΔiP) w równaniach kanonicznych. Po
dokonaniu obliczeń ponownie sprawdzamy, czy przyjęte do obliczeń przekroje prętów w drugim etapie
spełniają narzucone kryteria. Jeżeli nie, to dokonujemy kolejnej zmiany przekrojów prętów i powtarzamy
obliczenia, aż do skutku.
Reasumując konstrukcję statycznie niewyznaczalną projektujemy metodą kolejnych przybliżeń
(iteracyjnie rozwiązując w każdym kroku układ statycznie niewyznaczalny).
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater