Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
1
3.
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
Istotę metody przemieszczeń, najwygodniej jest przedstawić przez porównanie jej do metody sił, którą
wcześniej już poznaliśmy i przy użyciu której jesteśmy w stanie policzyć przemieszczenia i rozkład sił
wewnętrznych układów statycznie niewyznaczalnych. Tok obliczeń matematycznych jest podobny, jednak sens
fizyczny wielkości występujących w równaniach jest odmienny. Podstawowe różnice pomiędzy tymi metodami
zestawiliśmy w poniższej tabeli oraz zobrazowaliśmy w krótkich przykładach.
Tabela 3.1. Porównanie metody sił z metodą przemieszczeń
Niewiadomymi są:
Metoda sił
Metoda przemieszczeń
nadliczbowe siły
przemieszczenia węzłów
przemieszczenia w miejscu odrzuconych
reakcje w miejscu dołożonych więzów
więzów
Równania kanoniczne wyrażają:
O liczbie niewiadomych decyduje:
stopień statycznej niewyznaczalności
(SSN). Jest to liczba więzów
przesztywniających układ, które trzeba
odrzucić.
stopień kinematycznej
niewyznaczalności (SKN). Jest to
liczba więzów, które trzeba
wprowadzić aby układ usztywnić.
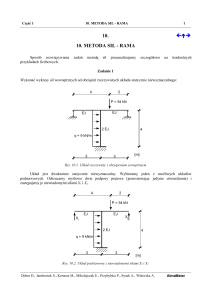
3.1. Algorytm obliczeń w metodzie przemieszczeń
Określenie stopnia kinematycznej (geometrycznej) niewyznaczalności polega na wyznaczeniu liczby
więzów, które należy wprowadzić, aby układ stał się geometrycznie wyznaczalny. Będzie to liczba węzłów
układu prętowego, w którym zbiegają się sprężyście utwierdzone pręty (węzły wewnętrzne) powiększona o
liczbę więzów (niezależnych podpór), które należy wprowadzić do układu, aby stał się nieprzesuwny.
W przypadku wieloprętowego układu, relację między kątami obrotów cięciw prętów wyznacza się z
łańcucha kinematycznego uzyskanego poprzez zamianę wszystkich węzłów wewnętrznych i podpór na
przeguby i określenie stopnia geometrycznej niewyznaczalności.
Układ podstawowy będzie układem, w którym wprowadza się wewnętrzne utwierdzenia do węzłów oraz
dodaje się podpory liniowe, uniemożliwiające przesuwy. Dalsze obliczenia zilustrujemy na przykładzie.
Przykład 1
Rozpatrujemy belkę ciągłą (rys. 3.1) statycznie niewyznaczalną, która jest obciążona dowolnym
obciążeniem ciągłym q. Pod wpływem tego obciążenia belka odkształci się, w wyniku czego powstanie stan
naprężeń wyrażony w postaci sił wewnętrznych. Rozwiążmy tą belkę najpierw metodą sił a następnie metodą
przemieszczeń.
q
Rys. 3.1 Belka ciągła statycznie niewyznaczalna
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
2
W metodzie sił, belka jest jednokrotnie statycznie niewyznaczalna (SSN = 1). Możemy zatem przyjąć układ
podstawowy w którym jedną z podpór zastąpimy niewiadomą siłą X1 (rys. 3.2).
X1
Rys. 3.2. Układ podstawowy w metodzie sił
Linia ugięcia takiej belki będzie sumą linii ugięć powstałych od obciążenia ciągłego q i od niewiadomej siły
X1 (korzystamy tutaj z zasady superpozycji skutków). Linie ugięć będą wyglądały mniej więcej tak jak na
rysunku 3.3.
S
w(q)
ws(q)
ws(x1)
w(x 1)
S
X1
w(q) = w(x 1)
S
Rys. 3.3. Linie ugięcia od obciążenia ciągłego q i od niewiadomej siły X1
Warunek geometrycznej zgodności:
w s qw s X 1 =0
zapisujemy w postaci równania kanonicznego:
11 X 1 1 P=0
Ta sama belka w metodzie przemieszczeń, będzie posiadać jeden niezależny kąt obrotu przekroju w węźle S
(SKN = 1). W celu przyjęcia najlepszego układu podstawowego wprowadzamy dodatkowy więz w postaci
utwierdzenia wewnętrznego (sztucznego), który zatrzymuje obrót ale nie blokuje przesuwu (rys. 3.4). W
przeciwieństwie do metody sił, nie będzie to więc układ statycznie wyznaczalny lecz układ przesztywniony.
φ1
s
Rys. 3.4. Układ podstawowy w metodzie przemieszczeń
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
3
Układ taki jest zgodny jedynie geometrycznie, kinematyczną zgodność zapewnia przemieszczenie w postaci
kąta obrotu φ1. Równowagę statyczną uzyskamy jeśli spełnimy równanie równowagi, opisujące reakcję we
wprowadzonym więzie:
M s=0
⇔
M s =M qM L M P =0
które jest równaniem kanonicznym:
r 11 1 r 1 P=0
Wykonując wykresy sił wewnętrznych powstałych zarówno od obciążenia q jak i od kąta obrotu φ1
korzystamy ze wzorów transformacyjnych (rys. 3.5).
M(q) =
ML(φ)
ql2
8
M(q)
M(φ1)
φ1
MP(φ)
Rys. 3.5. Wykresy momentów w układzie podstawowym od obciążenia ciągłego q oraz od kąta obrotu φ
Wykonując linię ugięcia (rys. 3.6) widzimy że ma ona taką samą postać jak ta, która powstała w wyniku
rozwiązania belki metodą sił, co świadczy o poprawności tej metody.
w(q,φ1)
φ1
Rys. 3.6. Linia ugięcia od obciążenia ciągłego q i i kąta obrotu więzu o φ1
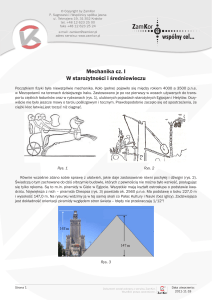
Przykład 2
Analizie poddamy ramę płaską (rys. 3.7) statycznie niewyznaczalną, która jest obciążona dowolną siłą
skupioną P i obciążeniem ciągłym q.
q
P
A
EJr
B
EJs
EJs
h
l
Rys. 3.7. Rama płaska statycznie niewyznaczalna
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
4
Pod wpływem tego obciążenia rama odkształci się, w wyniku czego powstanie stan naprężeń wyrażony
w postaci sił wewnętrznych. Rama ta składa się z prętów połączonych ze sobą w węzłach, pręty te będziemy
traktować jako tarcze doskonale sztywne podłużnie (nie uwzględniamy skracania i wydłużania się prętów pod
wpływem działania obciążenia). Pod wpływem przemieszczenia pręty ulegają deformacji, a węzły doznają
przemieszczeń. Stan przemieszczenia węzłów charakteryzują wielkości: kąty obrotów φ oraz niezależne
przesuwy Δ (które mogą być wyrażone przez niezależne kąty obrotów cięciw prętów ψik). Przyjmijmy więc te
wielkości za niewiadome w metodzie przemieszczeń. Aby uzyskać układ podstawowy w metodzie
przemieszczeń wprowadzamy wewnętrzne utwierdzenia (blokady obrotów po kierunku φ1, φ2) oraz dodatkową
podporę (blokada przesuwu po kierunku Δ3). W ten sposób naruszymy statykę układu (rys. 3.8).
MB,φ2
q
MA,φ1
RBH ,Δ3
P
EJr
A
B
EJs
EJs
h
l
Rys. 3.8. Układ podstawowy z dodatkowymi wewnętrznymi utwierdzeniami oraz z dodatkową podporą
Układ taki jest geometrycznie i kinematycznie zgodny. Zgodność statyczną, którą naruszyliśmy wprowadzając
dodatkowe więzy, zapewnimy spełniając równości:
{
∑ M A=0
∑ M B=0
∑ R HB =0
(3.1)
Warunki (3.1) oznaczają, że reakcje w dodatkowych podporach muszą być równe zero, bo w rzeczywistości
tych podpór nie ma. Podobnie było w metodzie sił: przemieszczenia po kierunku odrzuconych więzów musiały
być równe zero, bo w rzeczywistości te węzły były zablokowane.
Rozpisując każde z równań otrzymujemy:
{
M A PM A 1 M A 2 M A 3 =0
M B PM B 1 M B 2 M B 3 =0
R HB P R HB 1 R HB 2 R HB 3 =0
(3.2)
Przyjmując oznaczenia charakterystyczne dla metody przemieszczeń i wprowadzając symbol reakcji powstałej
od jednostkowego przemieszczenia rik (reakcja po kierunku niewiadomej i wywołana przemieszczeniem po
kierunku k):
{
r 11 1 r 12 2 r 13 3 R1 P=0
r 21 1 r 22 2 r 23 3R 2 P=0
R 31 1 r 32 2 R 33 3R 3 P=0
(3.3)
Zastępując symbole niewiadomych φ1 , φ2 , Δ3 zmienną uogólnioną Zj otrzymujemy ostateczny układ równań:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
5
{
r 11 Z 1r 12 Z 2 r 13 Z 3 R1 P=0
r 21 Z 1 r 22 Z 2 r 23 Z 3 R 2 P=0
R 31 Z 1 r 32 Z 2 R 33 Z 3 R 3 P=0
(3.4)
który możemy zapisać również w postaci wskaźnikowej:
n
∑ r ij Z j RiP=0
(3.5)
j=1
Układy statycznie niewyznaczalne można rozwiązać metoda przemieszczeń lub metodą sił. Ta sama
konstrukcja w każdej z tych metod może mieć inną liczbę niewiadomych. W niektórych przypadkach ram,
układ jest wielokrotnie statycznie niewyznaczalny, natomiast w metodzie przemieszczeń ma jedną niewiadomą,
w innych przypadkach jest na odwrót (rys. 3.9).
X7
X6
z1
X5
X3
X2
X4
X1
z6
z1
z2
z5
z3
z4
X1
Rys. 3.9. Układy podstawowe w metodzie sił i metodzie przemieszczeń
Proces obliczeń układów niewyznaczalnych metodą przemieszczeń przedstawimy w kilku przykładach
liczbowych.
Zadanie 1
Wyznaczyć wykres sił wewnętrznych w zadanej belce (rys. 3.10), korzystając z metody przemieszczeń.
P = 16 kN
A
q = 4 kN/m
B
2
2
C
6
[m]
Rys. 3.10. Belka statycznie niewyznaczalna
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
6
Przyjmujemy układ podstawowy. Zgodnie z założeniami metody przemieszczeń należy zablokować możliwe
przemieszczenia węzłowe. W tym przypadku będzie to tylko kąt obrotu na pośredniej podporze (rys. 3.11).
Wobec tego SKN = 1, natomiast w metodzie sił należałoby odrzucić dwa więzy (SSN = 2):
φB,MB
4
6
[m]
Rys. 3.11. Układ podstawowy z wprowadzonym dodatkowym wewnętrznym więzem
Ta krótka analiza dowodzi, że korzystniej (łatwiej) jest rozwiązać zadanie metodą przemieszczeń. Aby układ
podstawowy był zgodny z rzeczywistym, reakcja we wprowadzonym więzie musi być równa zero MB = 0
(warunek statecznej zgodności). Warunek ten będzie spełniony, jeżeli moment powstały od obciążenia
zewnętrznego będzie zrównoważony momentem powstałym od obrotu przekroju w podporze B:
M B qM B =0
(3.6)
Najpierw wykonujemy wykres momentów od jednostkowego przemieszczenia. Korzystając ze
transformacyjnych wyznaczamy momenty na poszczególnych prętach belki. Część belki AB
obustronnie utwierdzony, natomiast część BC to pręt utwierdzony w punkcie B i podparty
przegubowo nieprzesuwną w punkcie C. Wartości momentów od kąta obrotu wyznaczone ze
transformacyjnych mają wartości:
–
dla pręta AB (φA = 0, φB = 1, brak przesuwu ψAB = 0)
2 EJ
EJ
⋅2 A B−3 AB =
l
2
2 EJ
M BA=
⋅2 B A−3 AB =EJ
l
M AB=
–
wzorów
to pręt
podporą
wzorów
(3.7)
(3.8)
dla pręta BC (φB = 1, brak przesuwu ψBC = 0)
M BC =
3 EJ
EJ
⋅ B− BC =
l
2
(3.9)
Ponieważ w podporze C jest przegub
M CB =0
(3.10)
Korzystając z gotowych wzorów (tabela 1.2) obliczymy wartości momentów przywęzłowych od obciążenia
przęsłowego:
–
dla pręta AB
Pl
=−8 kNm
8
Pl
M BA= =8 kNm
8
M AB=−
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(3.11)
(3.12)
AlmaMater
Część 2
–
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
7
dla pręta BC
ql 2
=−18 kNm
8
M CB=0
(3.13)
M BC =−
(3.14)
Po obliczeniu momentów możemy narysować ich wykresy (rys. 3.12):
18
8
8
MB(q)
MP(0) [kNm]
8
18
8
EJ
MB(φ)
Mφ
1 EJ
2
EJ
1 EJ
2
1 EJ
2
Rys. 3.12. Wykresy momentów w układzie podstawowym od obciążenia zewnętrznego oraz od przemieszczenia φ=1
Z równowagi momentów w węźle B możemy wyznaczyć wartości reakcji w poszczególnych stanach
M B q=8−18
M B =1=EJ
EJ
2
(3.15)
Ponieważ reakcje te muszą się równoważyć:
M B qM B B=1 B=0
czyli:
8−18 EJ
EJ
B=0
2
(3.16)
Kąt obrotu przekroju B musi być równy:
3
10
=
2 B EJ
20
B=
3 EJ
(3.17)
Końcowe, rzeczywiste wartości momentów możemy obliczyć korzystając ze wzoru superpozycyjnego (3.18)
lub podstawiając do wzorów transformacyjnych obliczoną wartość kąta obrotu φB. Ich wykres w układzie
niewyznaczalnym przedstawiono na rys. 3.13.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
8
o
M n
P =M P M 1 1
EJ 20
24 10
14
M nAB =−8 ⋅
=− =− kNm
2 3 EJ
3
3
3
20
24 20 44
n
M BA=8EJ⋅
= = kNm
3 EJ
3
3
3
EJ 20
54 10
44
n
M BC =−18 ⋅
=− =− kNm
2 3 EJ
3
3
3
M n
=0
CB
44
3
14
3
(3.18)
(3.19)
(3.20)
(3.21)
(3.22)
MP(n) [kNm]
27
3
Rys. 3.13. Wykres momentów w układzie statycznie niewyznaczalnym
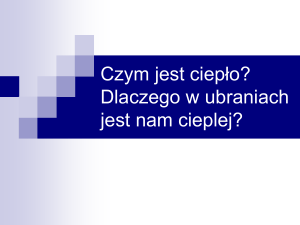
Zadanie 2
Rozwiązać zadaną ramę (rys. 3.14) korzystając z metody przemieszczeń.
B
C
q = 6 kN/m
4
A
3
[m]
Rys. 3.14. Rama płaska statycznie niewyznaczalna
Najpierw przyjmujemy układ podstawowy. Zgodnie z założeniami metody przemieszczeń należy zablokować
możliwe przemieszczenia. W tym przypadku będzie to kąt obrotu oraz przesuw poziomy (rys. 3.15) SKN = 2:
φ1,MB
B
Δ2
RC H
C
q = 6 kN/m
4
A
3
[m]
Rys. 3.15. Układ podstawowy z dodatkowym wewnętrznym utwierdzeniem oraz podporą poziomą
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
9
We wprowadzonych dodatkowo podporach powstaną reakcje, które w rzeczywistości powinny być równe
zero. Najpierw utworzymy wykresy momentów od jednostkowych przemieszczeń (φ1 i Δ2) oraz od obciążenia
zewnętrznego w przyjętym układzie podstawowym. Korzystając ze wzorów transformacyjnych wyznaczamy
momenty na poszczególnych prętach. Część AB to pręt obustronnie utwierdzony, natomiast część BC to pręt
utwierdzony w punkcie B i podparty podporą przegubowo nieprzesuwną w punkcie C.
Wartości momentów wywołane jednostkowym przemieszczeniem podpory B wyznaczamy ze wzorów
transformacyjnych przyjmując φ1 = φB = 1:
–
dla pręta AB ( φA = 0, φB = 1, ψAB = 0)
2 EJ
EJ
⋅2 A B −3 AB =
l
2
2 EJ
M BA=
⋅2 B A−3 AB =EJ
l
M AB =
–
(3.23)
(3.24)
dla pręta BC ( φB = 1, ψBC = 0)
M BC =
3 EJ
⋅ B −BC =EJ
l
M CB=0
(3.25)
(3.26)
MB(φ1)
EJ
EJ
EJ
EJ
M1
1
EJ
2
MB(φ1) = 2EJ
Rys. 3.16. Wykres momentów w układzie podstawowym od kąta obrotu φ1=1
Wartości momentów od przesuwu poziomego Δ2 = 1 wyznaczamy z tych samych wzorów po określeniu kątów
obrotu cięciw prętów ψ. Na skutek jednostkowego przesuwu po kierunku Δ2 cięciwy prętów obrócą się.
Wartości kątów obrotu wyznaczymy ze związków geometrycznych.
Δ2
Δ2
B
ΨBC
4
ΨAB
C
ΨBC = 0
Δ2
tg ΨAB =
4
Δ2
ΨAB =
4
A
Rys. 3.17. Kąty obrotu cięciw prętów na wskutek jednostkowego przesuwu po kierunku D2
W stanie Δ2 = 1 wyznaczamy wartości momentów:
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
–
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
dla pręta AB ( φA = 0, φB = 0, Δ2 = 1, AB =
10
1
)
4
2 EJ
3 EJ
⋅2 A B−3 AB =−
l
8
2 EJ
3 EJ
M BA=
⋅2 B A−3 AB =−
l
8
M AB=
–
(3.27)
(3.28)
dla pręta BC ( φB = 0, ψBC = 0)
M BC =
3 EJ
⋅ B− BC =0
l
M CB=0
(3.29)
(3.30)
MB(Δ2)
3
EJ
8
3
EJ
8
M2
3
EJ
8
MB(Δ1) = -
3
EJ
8
Rys. 3.18. Wykres momentów w układzie podstawowym od poziomego przesuwu Δ2 = 1
Wartości momentów od obciążenia wyznaczamy na podstawie gotowych wzorów (tabela 1.2):
–
dla pręta AB (obustronnie utwierdzonego)
ql 2
=−8 kNm
12
ql 2
M BA= =8 kNm
12
(3.31)
M AB=−
–
(3.32)
dla pręta BC
M BC =0
M CB=0
(3.33)
(3.34)
MB(P)
8
MP(0)
8
MB(P) = 8
8
Rys. 3.19. Wykresy momentów w układzie podstawowym od obciążenia zewnętrznego
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
11
Warunek statycznej zgodności (reakcje we wprowadzonych węzłach są równe zero):
{
∑ M B=0
∑ RCH =0
(3.35)
można rozpisać jako sumę reakcji od poszczególnych wpływów:
{
M B PM B 1 M B =0
R 2 PR 2 1 R 2 =0
(3.36)
Wprowadzając oznaczenia charakterystyczne dla metody przemieszczeń, otrzymujemy układ równań
kanonicznych:
{
r 11 Z 1 r 12 Z 2 R1 P=0
r 21 Z 1r 22 Z 2 R 2 P=0
(3.37)
gdzie rik to reakcja po kierunku zmiennej i wywołana przemieszczeniem po kierunku k, RiP to reakcja po
kierunku i wywołana obciążeniem zewnętrznym, Zi to nieznane przemieszczenie.
Z równowagi momentów w węźle B otrzymujemy pierwsze równanie:
3
82 EJ 1 − EJ 2 =0
8
po uporządkowaniu:
3
2 EJ 1− EJ 2 8=0
8
(3.38)
Natomiast drugie równanie otrzymamy korzystając z równania pracy wirtualnej (praca sił zewnętrznych jest
równa pracy wirtualnych sił wewnętrznych L z = L w ) (rys. 3.19). Praca sił rzeczywistych na wirtualnych
przemieszczeniach równa jest pracy sił wirtualnych na rzeczywistych przemieszczeniach. Ponieważ
1 a układ rzeczywisty nie przemieszcza się to:
wirtualnym przemieszczeniem jest jednostkowy przesuw 2 =
RC⋅
1∑ M ik M ki ⋅ik ∑ P i⋅i =0
Stan φ1=1
EJ
Stan Δ2=1
1
RC (φ1=1)
(3.39)
Stan P
1
1
RC (Δ2=1)
8
EJ
1
Ψ=
4
1
EJ
2
3
EJ
8
Ψ=
-
1
4
3
EJ
8
RC (P)
Q
δQ
Ψ=
-8
1
4
Q = q·4 = 4·4 =16 kN
δQ=
1
1
·1=
2
2
Rys. 3.20. Reakcja w poziomej podporze w poszczególnych stanach
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
12
Reakcje po kierunku Δ2 wyznaczymy w poszczególnych stanach. Dla stanu φ1 = 1:
EJ
R
C⋅1 =0
2
3
1
EJ⋅ R C =0
2
4
3
RC 1 =− EJ
8
EJ
(3.40)
Następnie dla stanu Δ2 = 1:
1
3
3
− EJ − EJ ⋅ RC⋅1=0
8
8
4
3 1
3
R C 2 = ⋅ ⋅EJ = EJ
4 4
16
(3.41)
Na koniec reakcja w stanie P:
1
4
1
2
R C P=−12
−88 ⋅ Q⋅ RC⋅1=0
(3.42)
Podstawiając powyższe wartości do drugiego równania (3.36) otrzymujemy jego ostateczną postać:
3
3
− EJ 1 EJ 2 −12=0
8
16
(3.43)
Wykorzystując zależności (3.38) i (3.43) zapisujemy układ równań kanonicznych:
{
3
2 EJ 1− EJ 2 8=0
8
3
3
− EJ 1 EJ 2 −12=0
8
16
(3.44)
którego rozwiązaniem są rzeczywiste przemieszczenia:
{
64
5 EJ
448
Z 2 =2 =
5 EJ
Z 1 =1 =
(3.45)
Ostateczne wartości momentów zginających można wyznaczyć ze wzorów transformacyjnych lub korzystając
ze wzoru superpozycyjnego (3.46). Końcowe wartości momentów przedstawiono na wykresie w układzie
niewyznaczalnym (rys. 3.21):
o
M n
P =M P M 1 1 M 2 2
EJ 64
3 EJ 448
176
M nAB =−8 ⋅
−
⋅
=−
kNm
2 5 EJ
8
5 EJ
5
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(3.46)
(3.47)
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
o
M n
P =M P M 1 1 M 2 2
64
3 EJ 448
64
M n
−
⋅
=− kNm
BA=8EJ⋅
5 EJ
8
5 EJ
5
64
448 64
n
M BC =0EJ⋅
0⋅
= kNm
5 EJ
5 EJ 5
n
M CB=0
(3.46)
64
5
13
(3.48)
(3.49)
(3.50)
64
5
4
M(n)
176
5
3
Rys. 3.21. Wykres momentów w układzie statycznie niewyznaczalnym
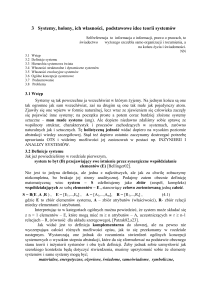
Zadanie 3
Wyznaczyć wartości reakcji w zadanej ramie korzystając z metody przemieszczeń.
P
q
l1
l3
l2
Rys. 3.22. Rama płaska statycznie niewyznaczalna
Układ podstawowy otrzymujemy wprowadzając dodatkowe więzy:
φ1
P
q
Δ3
l2
2
1
l1
φ2
0
2
l3
3
l2
Rys. 3.23. Układ podstawowy z dodatkowymi wewnętrznymi utwierdzeniami oraz z dodatkową podporą
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
14
Stateczną zgodność naruszonego układu zapewniamy równaniami:
{
∑ M A=0
∑ M B=0
∑ R HB =0
(3.51)
Możemy je także zapisać w postaci wskaźnikowej
n
∑ r ik⋅Z k RiP=0
(3.51)
k =1
Obliczając wartości kątów obrotu przyjmujemy poniższe zależności:
1=a⋅
2 =b⋅
Z
3== = 3
l3 l3
(3.52)
Δ=1
Ψ12=Ψ2
1
r3
2
l3
Ψ01=Ψ1
Ψ32=Ψ3
0
3
Rys. 3.24. Kąty obrotu cięciw prętów na wskutek jednostkowego przesuwu po kierunku r3
Wartości wszystkich reakcji obliczymy po wyznaczeniu wartości momentów dla poszczególnych stanów oraz
korzystając z równania pracy wirtualnej:
Stan φ1 = 1
r11
4EJ1
φ1=1
l1
2EJ2
r21
1
l2
r31
2
4EJ2
l2
2EJ1
0
l1
M1
3
Rys. 3.25. Wykres momentów w układzie podstawowym od kąta obrotu φ1 = 1
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
15
4 EJ 1 4 EJ 2
l1
l2
2 EJ 2
r 21 =
l2
r 11 =
(3.53)
Wartość reakcji r31 wyznaczamy z równania pracy wirtualnej (3.39):
M
1
01
1
1
1
M 1
1 M 12 M 21 ⋅2 M 23 ⋅3 r 31⋅1=0
10 ⋅
6 EJ 1
6 EJ 2
r 31 =−
⋅a−
⋅b
l1
l2
(3.54)
(3.55)
Stan φ2 = 1
r22 φ2=1 4EJ2
l2
r32
r12
1
3EJ3
2EJ2
2
l3
l2
M2
0
3
Rys. 3.26. Wykres momentów w układzie podstawowym od kąta obrotu φ2 = 1
4 EJ 2 3 EJ 3
l2
l3
2 EJ 2
r 21 =
l2
r 22 =
(3.56)
Wartość reakcji r32 wyznaczamy analogicznie jak dla reakcji r31, czyli z równania pracy wirtualnej:
M
2
01
2
2
2
M 2
1=0
1 M 12 M 21 ⋅2 M 23 ⋅3 r 32⋅
10 ⋅
6 EJ 2
3 EJ 3
r 32 =−
b−
l2
l3
(3.57)
(3.58)
Stan Δ3 = 1
r13
6a EJ1
l1l3
6a EJ1
l1l3
0
r23
6b EJ2
l2l3
Δ3=1
1
2
6b EJ2
l2l3
M3
r33
3 EJ3
l3 2
3
Rys.3.27. Wykres momentów w układzie podstawowym od poziomego przesuwu Δ3 = 1
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
6 aEJ 1 6 bEJ 2
−
l1l3
l2 l3
6 bEJ 2 3 EJ 3
r 23 =−
− 2
l2 l3
l3
16
r 13 =−
(3.59)
Wartość reakcji r33 wyznaczamy z równania pracy wirtualnej:
M
2
01
M 10 ⋅1 M 12 M 21 ⋅2 M 23 ⋅3 r 33⋅
1 =0
12 EJ 1 2 12 EJ 2 2 3 EJ 3
r 33 =
a
b 3
l 1 l 32
l 2 l 23
l3
2
2
2
2
(3.60)
(3.61)
Stan P:
R1P
ql
q
2
3
Pl2
P
8
12
1
q l32
12
Pl2
8
Pl2
8
0
R2P
R3P
2
3
MP
Rys. 3.28. Wykresy momentów w układzie podstawowym od obciążenia zewnętrznego
ql 32 Pl 2
R 1 P= −
12
8
Pl 2
R 2 P=
8
(3.62)
Wartość reakcji r3P wyznaczamy, jak poprzednio z równania pracy wirtualnej, które w tym przypadku
rozszerzone jest o pracę sił Q i P:
M
l3
l2
M 10P ⋅1 M 12PM 21P ⋅2 M 23P ⋅3R 3 P⋅
1Q⋅ ⋅1P⋅ ⋅2 =0
2
2
l3
l2
1
1
r 3 P=−Q⋅ ⋅a⋅ 3 −P⋅ ⋅b⋅ 3
2
2 l
l
P
01
(3.63)
(3.64)
Obliczone wartości reakcji podstawiamy do układu równań kanonicznych z którego już bardzo prosto można
wyznaczyć szukane przemieszczenia. Ostateczne wartości momentów zginających można wyznaczyć ze
wzorów transformacyjnych lub też korzystając ze wzoru superpozycyjnego przedstawionego poniżej:
0
M n
P =M P M 1⋅Z 1 M 2⋅Z 2 M 3⋅Z 3
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(3.65)
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
17
3.2. Sprawdzenie wyników
Podczas rozwiązywania zadań metodą przemieszczeń trudno jest ocenić poprawność uzyskanych
wyników. Istnieje jednak możliwość przeprowadzenia pewnych kontroli w trakcie obliczeń.
3.2.1. Symetria macierzy sztywności
Porównanie współczynników rik i rki jest pośrednim sposobem kontroli wyników. Macierz sztywności
powinna być symetryczna, dlatego obowiązuje zależność :
r ik =r ki
Dowód tego założenia opiera się na twierdzeniu Rayleigha:
Reakcja uogólniona rik odpowiadająca i-temu kierunkowi przemieszczenia uogólnionego a wywołana
jednostkowym przemieszczeniem k-tego więzu równa jest uogólnionej reakcji rki odpowiadającej k-temu
kierunkowi przemieszczenia uogólnionego wywołana jednostkowym przemieszczeniem i-tego więzu.
Współczynniki rik można sprawdzić również opierając się na twierdzeniu Bettiego o wzajemności prac, które
mówi:
Dla ciał liniowo sprężystych praca przygotowana (wirtualna, możliwa) zewnętrznych lub wewnętrznych
sił stanu obciążenia I na przemieszczeniach stanu obciążenia II równa jest pracy przygotowanej zewnętrznych
lub wewnętrznych sił stanu II na przemieszczeniach stanu I.
L z =Lw
Sens tego twierdzenia można zilustrować na poniższym przykładzie. Na rys. 3.29 przedstawiono układ o
SKN = 3. Po przyjęciu układu podstawowego wykonujemy wykresy momentów. Najpierw rozwiązano układ,
któremu nadano kąt obrotu 1 =1 (Stan I). Na rys. 3.30 widzimy ten sam układ, lecz kąt obrotu o wartości
1 działa w drugim węźle (Stan II).
φ1 = 1 3EJ1
l1
l1
2EJ2
l2
r21
r11
4EJ2
l2
r31
l3
MI
l2
Rys. 3.29. Wykres momentów MI dla φ1 = 1
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
18
3 EJ 4 EI 2
l1
l2
2 EJ 2
r 12 =
l2
r 11 =
φ2 = 1
4EJ2
l
r222
r12
2EJ2
l2
r32
4EJ3
l3
l3
M II
2EJ3
l3
l2
Rys. 3.30. Wykres momentów M II dla φ1 =1
Pracę sił zewnętrznych (reakcji ze stanu I na przemieszczeniach ze stanu II) można zapisać w następujący
sposób:
L z =r 11⋅0 r 21⋅1 r 31⋅0 ∑ R j⋅0 =r 21
Natomiast pracę sił wewnętrznych wyznaczamy korzystając z metody Wereszczagina - Mohra:
Lw=∑∫
[
M I M II
1 1 4 EJ 2
2 2 EJ 2 1 4 EJ 2
ds =
⋅
⋅l 2 ⋅ ⋅
− ⋅
EJ
EJ 2 2 l 2
3 l2
3 l2
1 2 EJ 2
2 4 EI 2 1 2 EJ 2
⋅
⋅l 2 ⋅ ⋅
− ⋅
2 l2
3 l2
3 l2
]
=
2 EJ 2
l2
stąd otrzymujemy wartość reakcji
r 21 =
2 EJ 2
l2
Jeżeli wyznaczamy pracę sił ze stanu II na przemieszczeniach ze stanu I, to:
L z =r 12⋅1 r 22⋅0 r 32⋅0 ∑ R j⋅0 =r 12
a praca sił wewnętrznych:
L w=∑∫
M II M I
2 EJ 2
ds=
EJ
l2
Ponieważ tym razem
r 12 =
2 EJ 2
l2
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
19
ostatecznie można zapisać
r 12 =r 21
Opierając się na twierdzeniu Bettiego o wzajemności prac, możemy sprawdzić współczynniki rik,
jednak sprawdzenie wielkości riP (wpływu sił zewnętrznych) jest kłopotliwe, ponieważ obliczając pracę sił
zewnętrznych (P) powinniśmy znać linie przemieszczeń prętów wywołanych obrotami bądź przesuwami
węzłów. Linie te są krzywymi wyższego stopnia, których w zadaniu nie wyznaczamy. Widać to na przykładzie
ramy, której wykres momentów w stanie odkształconym z1 = 1 przedstawiony jest na rys. 3.31, a od
obciążenia zewnętrznego na rys. 3.32.
Z1 = 1
Z1
r21
r11
r31
δ
Rys. 3.31. Wykres momentów i postać odkształcona w stanie Z1 = 1
Praca sił ze stanu P na przemieszczeniach ze stanu Z1 = 1 wymaga skomplikowanego całkowania.
L z =r 1 P⋅1 r 2 P⋅0 r 3 P⋅0 ∫ q ds
s
q
r2P
r1P
r3P
Rys. 3.32. Schemat obciążenia i wykres momentów od obciążenia ciągłego
3.2.2. Sprawdzenie kinematyczne
W metodzie przemieszczeń sprawdzenie kinematyczne nie daje pewności poprawnego rozwiązania
zadania, jak było w metodzie sił. Pozwala ono jedynie ocenić czy wykres momentów zginających jest
poprawny. Kontrolę kinematyczną przeprowadza się podobnie jak w metodzie sił tzn. opierając się na
zależności:
{
∑ Pi i ∑ Rk k =∑ ∫ M
i
i
j
s
}
M P t t
NP
T
ds∫ N
t t ds∫ T P ds
EI
h
EA
GA
s
s
∑ Rn R n f ∑ Bm b m
P
n
m
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 2
3. METODA PRZEMIESZCZEŃ - ZASADY OGÓLNE
20
gdzie:
MP, NP, TP - wewnętrzne siły rzeczywiste,
Δi
- niewiadome przemieszczenie,
Pi
- jednostkowa siła wirtualna,
Rk
- reakcja wywołana siłą jednostkową wirtualną w podporze k (doznającej przemieszczenia),
Δk
- znane przemieszczenie podpory (narzucone osiadanie podpór),
Rn
- reakcja wirtualna w n-tej podporze podatnej,
RnP
- reakcja rzeczywista w n-tej podporze podatnej,
bm
- wartość błędu montażu (liniowa lub kątowa) w punkcie m,
Bm
- siła w pręcie po kierunku wielkości obarczonej błędem.
3.2.3. Sprawdzenie statyczne
Zadanie jest rozwiązane poprawnie jeśli w sprawdzeniu statycznym dla całego układu, obciążonego
siłami zewnętrznymi oraz wyznaczonymi przez nas siłami w podporach (zawieszonego na reakcjach
podporowych), okaże się, że prawdziwe są równości:
∑ X =0
∑ Y =0
∑ M =0
Suma momentów może być zapisana względem dowolnego punktu układu.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater