391
IX. PRZEMYSŁOWE TOMOGRAFY KOMPUTEROWE (CT)
W dokładnych pomiarach geometrycznych części maszyn dominuje technika
współrzędnościowa oparta na w pełni skomputeryzowanych współrzędnościowych
maszynach pomiarowych, zarówno w odniesieniu do przetwarzania wyników pomiarów do
wymaganej postaci, jak i w zakresie sterowania czynnościami pomiarowymi [11,25]. W
ostatnich latach pojawiła się, w pewnym zakresie konkurencyjna czy też uzupełniająca
technika pomiarów współrzędnościowych, oparta na rentgenowskiej tomografii
komputerowej [5,13,14,A9,A102,A101]. Pozwala ona wyznaczać wymiary przestrzennie
uformowanych elementów wytwarzanych przez przemysł maszynowy, motoryzacyjny i
lotniczy. Mimo, że technika ta jest mniej dokładna od pomiarów za pomocą
współrzędnościowych maszyn pomiarowych, charakteryzuje się względem niej pewną
przewagą, bowiem może ona wykrywać nieciągłości materiałowe mierzonego przedmiotu w
postaci wad w aspekcie defektoskopii, wyznaczać wymiary wewnętrzne oraz monitorować
wyniki montażu zespołów mechanicznych jak i elektrycznych.
Rozdział ten obejmuje IX.1. Zasady pomiarów tomograficznych; IX.2. Przykłady
tomografów i ich zastosowania; IX.3. Funkcje pomiarowe i ich oprogramownia; IX.4
Parametry charakteryzujące dokładność i metody ich wyznaczania.
IX.1. Zasady pomiarów tomograficznych
Dotychczas tomografia komputerowa CT znana była z zastosowań medycznych.
Współtwórcami tomografu komputerowego dla medycyny byli Allan MacLeod Cormack
(1924‚1998) i Godfrwey Newbold Hounsfield (1919‚2004), którzy w roku 1979 otrzymali
nagrodę Nobla, chociaż pierwszy tomograf zainstalowany został w 1973 r.[5,13,14].
Tomografia komputerowa, CT (Computed Tomography – CT) jest rodzajem
spektroskopii rentgenowskiej, metodą diagnostyczną pozwalającą na uzyskanie obrazów
warstwowych badanego obiektu. Wykorzystuje ona złożenie projekcji obiektu wykonanych z
różnych kierunków do utworzenia obrazów przekrojowych (2D) i przestrzennych (3D).
Tworzenie obrazu tomograficznego polega na pomiarze pochłaniania promieniowania
przechodzącego przez obiekt. Bryła obiektu podzielona jest na małe komórki, zwane
vokselami, w których liniowy współczynnik pochłaniania promieniowania jest taki sam.
Zrekonstruowany obraz przekrojowy jest ilościową mapą liniowego współczynnika
pochłaniania promieniowania w vokselach, wchodzących w skład skanowanej warstwy.
Obliczenie rozkładu współczynników pochłaniania promieniowania dokonywane jest przez
komputer i dlatego metoda ma nazwę tomografii komputerowej.
Podstawowym sposobem badania jest skierowanie na badany obiekt
wiązki
promieniowania X i rejestracja jego natężenia po drugiej stronie na detektorach.
Promieniowanie X przechodząc przez badany obiekt, doznaje osłabienia, które jest funkcją
energii promieniowania, rodzaju i grubości badanego materiału. Zmiana natężenia
promieniowania równoległej wiązki o jednakowej energii, przy przejściu przez obiekt opisana
jest zależnością [5,13]:
I = I 0 e g
(IX.1)
gdzie: I – natężenie promieniowania po przejściu przez obiekt,
I 0 - początkowe natężenie promieniowania,
μ – liniowy współczynnik absorpcji promieniowania charakterystyczny dla danego
materiału i określonej długości fali promieniowania X,
g – grubość badanego materiału.
392
Liniowy współczynnik osłabienia promieniowania jest zależny od liczby atomowej i
gęstości materiału obiektu. Jest on opisany przez prawo Bragga i Pierca [7,16,17]:
(IX.2)
k3 Z 3
gdzie: k – współczynnik proporcjonalności, λ – długość fali promieniowania,
Z – liczba atomowa materiału.
Promieniowanie X charakteryzuje się ponadto następującymi własnościami:
- jonizowaniem gazu,
- jest niewyczuwalne przez zmysły człowieka (nie mylić ze szkodliwością na organizm
człowieka),
- przebiega po liniach prostych,
- nie podlega odchylaniu w polu magnetycznym i elektrycznym,
- podlega odbiciu, załamaniu i rozpraszaniu,
- ma zdolność przenikania przez materię,
- ulega osłabieniu przy przejściu przez materię.
W tomografii komputerowej najczęściej stosowane są dwa poniższe rodzaje układów
projekcji [3]:
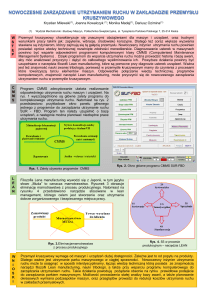
a) układ z równoległą wiązką promieniowania (rys.IX.1) – układ ten składa się z
płaskiej wiązki promieniowania X, które jest emitowane w kierunku mierzonego obiektu
znajdującego się na stole obrotowym. Po drugiej stronie badanego elementu umieszczony jest
liniowy detektor rejestrujący sygnał pomiarowy. Przedmiot badany jest przemieszczany
kątowo i liniowo w kierunku x,y,z lub też występuje przemieszczenie układu lampa
rentgenowska – tablica detektorów; w tym przypadku występuje złożenie dwóch składowych:
ruchu wzdłużnego sprzężonych ze sobą lampy i detektora liniowego, pozwalającego dokonać
jednej projekcji oraz ruchu okrężnego wokół punktu centralnego, który to ruch pozwala
zebrać wszystkie potrzebne do zrekonstruowania obrazu projekcje. W układzie tym wiązkę
promieniowania X ogranicza się przy pomocy odpowiedniej przesłony do wiązki płaskiej.
Obraz badanego obiektu otrzymuje się skanując go z pewnym krokiem przesuwu obiektywu
w górę, wykonując za każdym krokiem obrót o 360°. Wykonując obrót obiektu o 360°
otrzymuje się płaski obraz rentgenowski jednego przekroju mierzonego detalu. Pełen obraz
trójwymiarowy otrzyma się dokonując komputerowej rekonstrukcji przetwarzając
zgromadzone dane z pomiarów.
Rys. IX.1Schemat układu z płaską wiązką równoległą [A13]
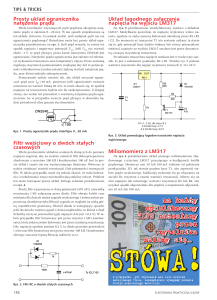
b) układ z wiązką stożkową – wiązka promieniowania uformowana jest w stożek.
Źródłem promieniowania jest lampa rentgenowska o napięciu najczęściej w przedziale 225‚
450 kV. W układzie tym badany obiekt znajduje się na stole obrotowym, poruszającym się
393
względem nieruchomych: lampy i tablicy detektorów. Stosując przestrzenną wiązkę
rentgenowską (rys.IX.2) i detektor matrycowy, i po wykonaniu przez obiekt pełnego obrotu o
360°, otrzymuje się jeden przekrój całego przedmiotu.
Rys.IX.2.Schemat układu z wiązką stożkową [A13]
Dokładność końcowego odwzorowania zależy od ilości projekcji wykonanych dla
pełnego obrotu detalu (minimum cztery na każdy stopień obrotu). W ten sposób mając obrazy
projekcji dla wielu przekrojów elementu dokonuje się rekonstrukcji obrazu całego elementu
za pomocą transformaty Radona [5]. Pozwala ona na odtworzenie obrazu trójwymiarowego
obiektu z wielu rzutów tego przedmiotu. Metoda ta jest obecnie najczęściej stosowana w
przemysłowej tomografii komputerowej ze względu na szybkość rekonstrukcji obrazu, oraz
prostszą konstrukcję układu. Rozwiązanie to jest stosowane w sytuacjach, gdzie czas jest
wartością krytyczną.
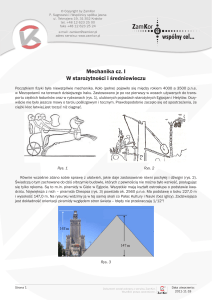
Jednostką obrazu przestrzennego 3D jest voxel - volumetric element (odpowiednik
piksela dla obrazu 2D), któremu odpowiada średnica przedmiotu d podzielona przez liczbę
pikseli N (V=d/N) – rys.IX.3.
Rys.IX.3. Niektóre parametry charakteryzujące tomografie CT [A13, A101]
Rozmiar voxela może być scharakteryzowany w nawiązaniu do piksela P i powiększenia M
jako iloraz V=P/M, gdzie: M = FDD/FOD (rys.IX.3).
394
IX.2. Główne zespoły tomografów i ich funkcje
Do głównych zespołów tomografu zalicza się lampę rentgenowską 1 (rys. IX.4) i jej
zasilacz, układ pozycjonujący mierzony element zwykle składający się z obrotowego stołu
pomiarowego i prowadnicy liniowej 2 oraz z systemu detektorów 3 często w postaci matrycy
(panelu).
3
2
1
Rys.IX.4. Główne zespoły tomografu komputerowego CT na przykładzie tomografu METROTOM [W3]
firmy C. Zeiss
Działanie matrycy detektorów opierać się może na różnych zjawiskach fizycznych, np.
na jonizacji gazów. W najnowszej tomografii stosuje się detektory natężenia promieniowania
rentgenowskiego, zwane detektorami scyntylacyjnymi, które są oparte na płytach
amorficznych krzemu i selenu.
Główne parametry detektorów promieniowania rentgenowskiego charakteryzowane są
przez: wydajność detekcji, energetyczną zdolność rozdzielczą, stabilność pomiarów w czasie,
bezwładność, rozdzielczość przestrzenną detekcji, kontrastowość obrazu, odporność na
zniszczenie przez napromieniowanie i szumy własne. W większości tomografów stosowane
są detektory matrycowe, które osiągają rozdzielczość 1024x1024 pikseli, co odpowiada
rozdzielczości przestrzennej obrazu wynoszącej ponad miliard vokseli (10243). Występują
także detektory matrycowe o rozdzielczości wynoszącej 2048x2048.
Lampa rentgenowska, której schemat przedstawiono na rys.IX.5 emituje promienie x.
Bańka próżniowa mająca zatopione elektrody: anodę i katodę w postaci wolframowej spirali
(w tzw. jonowej lampie rentgenowskiej bańka wypełniona jest gazem pod ciśnieniem rzędu
10-3 Tr).
2400 ÷ 3000oC
5÷12V
3 ÷6A
20 ÷ 450KV do 20mA
Rys.IX.5. Schemat działania lampy rentgenowskiej: zarzona katoda, A- anoda, Win i Wout - wlot i wylot cieczy
(C) chłodzącej anodę [Wikipedia]
395
Wysokie napięcie przyłożone do elektrod przyspiesza dodatnie jony (jonowa lampa
rentgenowska) lub elektrony, które odrywają się z katody (elektronowa lampa rentgenowska),
cząstki te bombardując elektrodę (odpowiednio: antykatodę - jonowa lampa rentgenowska lub
anodę - elektronowa lampa rentgenowska) emitują promieniowanie hamowania, będące
strumieniem kwantów promieniowania x o ciągłym widmie energetycznym.
Promieniowanie hamowania powstaje w wyniku oddziaływania cząstki z polami
elektrostatycznymi jąder i elektronów w materii, z której wykonana jest anoda. Elektrony
zderzając się z anodą są w niej hamowane, co powoduje powstawanie promieniowania x.
Jednak 99% energii elektronów jest zamieniane w ciepło - stąd konieczność chłodzenia
lampy. Chłodzenie zapewnia ciecz chłodząca lub wirująca anoda. Istnieje wiele
mechanizmów powstawania promieni rtg, a więc wiele rodzajów lamp rtg – odsyłam
czytelnika do bogatej kolekcji lamp rentgenowskich prowadzonej przez dr G. Jezierskiego
[www.xraylamp.webd.pl].
Rozróżnia się szereg rodzajów lamp, których schematy przedstawiono na rys.IX.6 i
IX.7.
a)
b)
Rys.IX.6. Schematy lamp rentgenowskich: a) typu transmisyjnego, b) typu kierunkowego [A101]
Lampy typu transmisyjnego (rys.IX.6a) odznaczają się większym powiększeniem, a
typu kierunkowego (rys.IX.6b) większą mocą. Natomiast lampa z mikrofokusem (rys.IX.7a)
charakteryzuje się mniejszą minimalną odległością przedmiotu od ogniska i większym
powiększeniem. Lampa z nanofokusem (rys.IX.7b) ma rozbudowaną soczewkę magnetyczną
i zawiera przysłonę minimalizując wielkość plamki w ognisku.
a)
b)
Rys.IX.7. Schematy lamp rentgenowskich: a) z mikrofokusem, b) z nanofokusem [A101]
396
Oto przykłady lamp rentgenowskich.
Na rys.IX.8 przedstawiono jedną z lamp rentgenowskich firmy Hamamatsu[W9], a na
rys.IX.7 firmy Yxlon [W34].
Rys.IX.8. Lampa rtg o symbolu L10711 firmy Hamamatsu [W9]
Rys.IX.9. Lampa rtg firmy FXE-225.99 firmy Yxlon [W34]
Lampa rentgenowska firmy Hamamatsu o symbolu L10711 ma budowę otwartą typu
transmisyjnego. Występują dwie odmiany tej lampy o symbolu S i W. Maksymalne napięcie
lampy S wynosi 110 kV, a lampy o symbolu W 162 kV. Materiałem katody lampy S jest
monokryształ sześcioborku lantanu (LaBe6) zaś lampy W wolfram. Minimalna rozdzielczość
wynosi odpowiednio dla wymienionych lamp 0,25 µm i 0,8 µm, a maksymalny prąd 30 µA i
50 µA. Okno wyjściowe lampy wykonane jest z berylu. Odległość od ogniska do przedmiotu
wynosi 0,5mm. Kąt rozwarcia wiązki wynosi 140o. Moc maksymalna lampy 350kV, a turbo
pompy 500W. Masa lampy wynosi 72kg, jednostki kontrolnej 8kg, a masa pompy próżniowej
10,5kg.
Natomiast lampa oferowana przez niemiecką firmę YXLON zbudowana jest z
połączenia dwóch oddzielnych lamp: transmisyjnej i kierunkowej (rys.IX.9). Napięcie
zasilania obu z nich wynosi 225 kV. Przełączanie trybu pracy między nimi może odbywać się
w trakcie pomiaru, dzięki czemu uzyskuje się właściwości cechujące oba rodzaje lamp. Dla
lampy transmisyjnej są to: duże powiększenie geometryczne i małe wymiary ogniska lampy,
natomiast dla lampy kierunkowej duża energia promieniowania, co pozwala na wnikanie w
materiały o dużej gęstości.
Ważniejsze parametry lampy FXE-225.99 Twin Head są następujące :
a) transmisyjnej:
- napięcie zasilania: 225 kV,
- maksymalna wartość prądu anodowego: 1 mA,
- moc maksymalna: 64 W,
397
- maksymalna moc cieplna anody: 10 W,
- wymiary ogniska lampy od 2 μm,
- rozpoznawanie szczegółów od 0,5 μm,
- minimalna odległość FOD (lampa-detektor): 250 μm,
b) kierunkowej:
- napięcie zasilania 225 kV,
- maksymalna wartość prądu anodowego 3 mA,
- moc maksymalna 320 W,
- maksymalna moc cieplna anody 280 W,
- wymiary ogniska lampy od 6 μm,
- rozpoznawanie szczegółów od 3 μm,
- kąt rozwarcia wiązki 30°,
- minimalna odległość FOD (Focus to Object Distance) 6,75 mm.
Lampa ta ma możliwość pracy w trybach o dużej rozdzielczości obrazu, dużej energii
promieniowania X i wiązki o kształcie stożkowym. Ma ona również zaimplementowaną
technikę TXI (ang. True X-ray Intensity Control) umożliwiającą stabilizację intensywności
promieniowania X w czasie trwania pomiaru.
Zestaw obrotowo-przesuwny (rys.IX.10) składa się z obrotowego stołu sterowanego
cyfrowo, i liniowego układu przemieszczenia, który służy do ustawiania w określonej
odległości przedmiotu między lampą rentgenowską a matrycą detektorów.
Rys.IX.10. Przykładowy zestaw obrotowo-przesuwny
Układ pozycjonowania w większości tomografów składa się ze stołu obrotowego, na
którym umieszczony jest badany obiekt, i prowadnic pozycjonujących stół obrotowy
względem źródła promieniowania i detektora. Dodatkowo w tomografach z dużymi zakresami
pomiarowymi źródło promieniowania i detektor umieszczone są na prowadnicach.
Stoły obrotowe charakteryzują się następującymi głównymi parametrami: dokładnością
pozycjonowania zawierająca się w przedziale od części do kilkunastu µrad, przy
rozdzielczości od 0,2 µrad do 10 µrad. Średnica stołu obrotowego od 200 do 300 mm, przy
obciążeniu stołu masą przedmiotu dochodząca nawet do 100kg.
Od prowadnicy liniowej, służącej do ustawiania odległości przedmiotu między lampą
rentgenowską a matrycą detektorów, nie wymaga się takiej dokładności jak od stołu
pomiarowego. Zwykle jej zakres przemieszczeń nie przekracza 250 mm, z dokładnością
wynoszącą 0,025 mm, przy powtarzalności pozycjonowania ±0,003 mm.
Głównymi źródłami błędów w układach pozycjonowania tomografów są: pochylenie
detektora, zmiana położenia i pochylenie osi obrotu stołu obrotowego. Pierwsze z nich jest
wyeliminowane, gdyż detektor znajduje się w stałej pozycji. Dlatego ważny jest dobór stołu
obrotowego z możliwie najmniejszym osiowym błędem pozycjonowania i pochylenia
powierzchni pomiarowej stołu.
398
Przykładem stołu obrotowego jest ABRS-250MP (rys.IX.11) amerykańskiej firmy
Aerotech [W2]. Łożyskowanie aerostatyczne i silnik skokowy z enkoderem optycznym
zapewniają dużą dokładność i rozdzielczość ruchu obrotowego. Wykonany jest z aluminium,
co obniża jego masę całkowitą przy wystarczającej nośności. Stolik ten przeznaczony jest do
zastosowań w pomiarach optycznych, radiograficznych, czy elementów MEMS.
Parametry stołu obrotowego ABRS-250MP są następujące:
a) dokładność pozycjonowania: 0,4 μrad,
b) rozdzielczość ruchu: 0,2 μrad,
c) powtarzalność pozycjonowania: 0,2 μrad,
d) błąd przesunięcia osi: 0,1 μm,
e) błąd pochylenia powierzchni stolika: 2,4 μrad,
f) średnica stołu: 228 mm,
g) nośność: 66 kg.
Rys.IX.11. Przykłady obrotowych stołów pomiarowych firmy Aerotech [W2] i firmy C.Zeiss [W3]
Stół obrotowy firmy C.Zeiss (rys. IX.11) ma rozdzielczość wynoszącą 0,044″. Ma on
łożyskowanie aerostatyczne. Charakteryzuje się stosunkowo małymi odchyłkami odchyleń osi
obrotu, bowiem wynoszą one: bicie osiowe fa=0,1, bicie promieniowe fr=0,2 µm, błąd
zataczania ft=0,2″. Powtarzalność pozycji kątowej 0,5″.
Liniowe układy przesuwne przedstawione są na rys.IX.12.
a)
b)
Rys.IX.12. Przykłady linowych prowadnic
Na rys. IX.12a przedstawiona jest prowadnica XY o symbolu GXY40 firmy GMT
GLOBAL Inc. (Taiwan). Ma ona zakresy pomiarowe wynoszące: w osi X ±200mm, w osi Y
±2500 mm. Dokładność przemieszczenia wynosi 0,025 mm, a powtarzalność 0,003 mm.
399
Rys. IX.12b prezentuje układ przesuwny liniowy o symbolu LMA jako actuator firmy
Aerotech z zastosowanym bezstykowym układem pomiarowym. Główne parametry obejmują;
zakresy pomiarowe od 100 do 1000mm, rozdzielczość 0,1 i 1µm, dokładność ±1 µm/25mm,
powtarzalność ±0,5µm, prędkość przesuwu 5m/s, a przyspieszenia 3g.
Tomografy w zasadzie mają stałe położenia lampy i matrycy detektorów, są jednak
takie, które pozwalają na ustawianie zarówno lampy jak i matrycy względem przedmiotu, co
zmniejsza wymagania odnośnie zakresów pomiarowych układu obrotowo-przesuwnego stołu.
Na rys.IX.13 przedstawiono jeden z takich tomografów o symbolu v|tome|x L450 z
przesuwną lampą i z przesuwną matrycą z sensorami. Jest to tomograf firmy Phoenix-xray
[A13, w8].
Lampa przesuwna
Stolik obrotowoprzesuwny
Matryca z
sensorami
Rys. IX.13. Tomograf v|tome|x L450 firmy Phoenix-xray.
Detektor jest przetwornikiem, który zamienia przechodzące przez obiekt
promieniowanie zawierające informacje o badanym obiekcie na sygnał elektroniczny
nadający się do dalszego przetwarzania. System detekcji może składać się z pojedynczego
elementu skanującego, liniowego układu elementów lub powierzchniowego układu
elementów skanujących. Jest to bardzo ważny element układów stosowanych w pomiarach
tomograficznych, ponieważ od detektorów w dużym stopniu zależy jakość obrazu badanego
obiektu, czas projekcji i wydajność pomiarów.
Działanie detektorów opiera się na różnych zjawiskach fizycznych [14]:
- detektory oparte na jonizacji gazu,
- detektory matrycowe na bazie amorficznego krzemu,
- detektory półprzewodnikowe,
- detektory scyntylacyjne,
- detektory konstruowane według technologii opartej na wykorzystaniu elektrycznych
lub magnetycznych zjawisk w ciałach stałych.
Obecnie dominują detektory scyntylacyjne, których schemat przedstawiono na rys.
IX.14.
Rys.IX.14. Schemat budowy detektora matrycowego [5, A101]
400
Promieniowanie rtg padając na kryształ scyntylacyjny wywołuje zjawisko
fotoelektryczne, podczas którego fotony promieni X wybijają elektrony z orbit, te zaś
zamieniane są na rozbłyski światła. Aktualnie najczęściej stosuje się dwa typy detektorów
wykorzystujących płyty z amorficznego krzemu (a-Si) i z amorficznego selenu (a-Se).
Scyntylator przekształca promieniowanie X w promieniowanie widzialne, które ładuje
fotodiody [14]. Uproszczony schemat z folią scyntylacyjną przedstawia rys. IX.15. W tym
przypadku promienie X są zamieniane na światło widzialne poprzez folię scyntylacyjną.
Rys.IX.15. Uproszczony schemat matrycy detektorów [14]
Fotodiody są odczytywane przez tranzystory cienkowarstwowe (TFT) na podłożu
amorficznego krzemu odpornego na promieniowanie, który daje pewną dodatkową nieostrość
przez rozpraszanie światła (rys. IX.16). W celu wyeliminowania tego zjawiska na
powierzchni fotodiod stosuje się igiełkowe kryształy jodku cezu (CsI) poprawiające
rozdzielczość przestrzenną, gdyż przewodzą światło do fotodiod jak światłowody. Rozbłyski
światła wywołane przez scyntylatory rejestrowane są przez fotodiody. Następnie sygnał
elektryczny z fotodiod rejestrowany jest przez tranzystory, wzmacniany i przetwarzany za
pomocą przetwornika A/C na sygnał cyfrowy.
Rys.IX.16. Schemat budowy detektora z amorficznego krzemu z ekranami fluoroscencyjnymi [5,14]
Innym rozwiązaniem w budowie detektorów promieniowania X jest bezpośrednie
przetwarzanie z amorficznego krzemu (rys. IX.17). Fotodiody bezpośrednio przetwarzają
fotony promieniowania rentgenowskiego na elektrony, dzięki czemu unika się rozpraszania
światła co ma miejsce w poprzedniej konstrukcji detektora. Półprzewodnik jest umieszczony
na mikroelektrodach znajdujących się w silnym polu elektrycznym. Promieniowanie
401
generuje ładunki, które są magazynowane w mikrokondensatorach. Każdy z tych
kondensatorów podłączony jest do tranzystora działającego jak wzmacniacz, generujący
napięcie proporcjonalne do ładunku wytworzonego przez piksele.
Rys.IX.17. Schemat budowy detektora z amorficznego krzemu
bezpośrednio przetwarzającego. [5,13,14]
Spotyka się także detektory półprzewodnikowe, w których wykorzystuje się jonizację
w ciele stałym. Przykładem takiego detektora jest detektor, w którym odpowiedni kryształ,
np. siarczku kadmu CdS, pod działaniem promieniowania jonizującego zwiększa swoją
przewodność. Polega to na zmianach natężenia prądu płynącego w obwodzie, do którego
włączono detektor CdS, zmienia się ono w zależności od padającego na detektor
promieniowania. Detektory półprzewodnikowe charakteryzują się prostą konstrukcją,
stabilnością pracy, dużą czułością i dużą zdolnością rozdzielczą przy pomiarach energii
promieniowania.
W literaturze wymienia się następujące parametry opisujące jakość pomiarów
osiąganych przez różne detektory promieniowania rentgenowskiego [14]:
- wydajność detekcji,
- energetyczna zdolność rozdzielcza,
- stabilność pomiarów w czasie,
- bezwładność,
- rozdzielczość przestrzenna detekcji,
- odporność na zniszczenie przez napromieniowanie,
- kontrastowość obrazu,
- szumy własne detektorów.
Przykłady detektorów matrycowych. Na rys. IX.18. przedstawiono widok panelu
detektorów o symbolu XRD01620 niemieckiej firmy YXLON [W34]. Jego parametry są
następujące;
a) rozdzielczość 2048 x 2048 pikseli,
b) wymiar piksela: 200x200 μm,
c) powierzchnia detektorów: 400 mm 2 ,
d) szybkość przetwarzania obrazu: 3,5 klatek/sek.,
e) 16-bitowy przetwornik analogowo-cyfrowy,
f) praca w zakresie temperatury: 15‚35°C,
g) dopuszczalny zakres napięć źródła promieniowania: 40 kV‚15 MV.
402
Rys.IX.18. Panel detektorów XRD0120 firmy Yxlon [W34]
Ważniejsze parametry paneli detektorów firmy Xylon zebrano w tablicy IX.1.
Tablica IX.1. Parametry wybranych paneli detektorów serii XRD firmy Xylon
Parametry paneli detektorów
firmy YXLON
Y. Panel XRD 0820
Composite
Y.Panel XRD
01620 Universal
Y.Panel XRD
0840 Universal
Y.Panel XRD
01640 Universal
1000 ×1000
200 × 200 mm2
200 μm
2000 × 2000
400 × 400 mm2
200 μm
500 × 500
200 ×200 mm2
400 μm
1000 × 1000
400 ×400 mm2
400 μm
Sensor
Aktywne piksele
Powierzchnia użytkowa
Rozmiar piksela
Detektor
Zakres energii
15keV - 160keV 40keV– 15MeV 40keV - 225keV 40keV – 15MeV
Maksymalna liczba klatek
7,5
3,5
15
15
na sekundę
Konwersja
16 bitowa
16 bitowa
16 bitowa
16 bitowa
Warunki środowiskowe
Temperatura pracy
+15oC ‚ +35oC
+15oC ‚ +35oC +15oC ‚ +35oC +15oC ‚ +35oC
Wilgotność powietrza
30% - 70%
30% - 70%
30% - 70%
30% - 70%
Wymiary
335×320×20 mm 672×599×44 mm 335×320×52 mm 672×599×44 mm
Masa
16 kg
25 kg
16 kg
25 kg
Panele detektorów XRD 0820 mają zastosowanie głównie do elementów z materiałów
polimerowych, a panele XRD 01620 - do przedmiotów, w których zamierza się wykrywać
szczegóły wad materiałów aluminiowych, tytanu i ze stali szlachetnej. Natomiast panele
XRD 01640 pozwalają na wykrywanie szczegółów w kontroli automatycznej części
odlewanych.
Wymienione główne zespoły składają się na tomograf komputerowy CT, chociaż nie
wymieniono tutaj wszystkich zespołów, jak np. układów sterujących, obudowy
zabezpieczającej przed promieniowaniem, jednostek komputerowych (zwykle są dwie lub
trzy o różnych parametrach) oraz odpowiedniego
oprogramowania zapewniającego
wykonanie następujących funkcji:
1. Do wyznaczania i analizy wymiarów w zakresie standardowej geometrii wymiarów,
2. Porównywanie wyników z modelem CAD,
3. Wykrywanie wad materiału – defektoskopia,
4. Przetwarzanie wyników dla potrzeb inżynierii odwrotnej (rewerse engineering).
403
IX.3. Przykłady tomografów i ich zastosowania
Obecnie na rynku europejskim oferowane są tomografy do zastosowań przemysłowych,
już nie tylko w zakresie defektoskopii, ale takie, które umożliwiają przeprowadzanie
pomiarów współrzędnościowych, zarówno części jak i zespołów mechanicznych oraz
zespołów elektronicznych.
Przedstawione zostaną tomografy następujących producentów:
- Tomografy Metrotom produkcji firmy C.Zeiss [www.zeiss.pl],
- Tomografy z serii XT H firmy Nikon [www.nikonmetrology.com],
- Systemy tomograficzne 2D 3D firmy GE Measurement & Control Solutions
[www.phoenix-xray.com],
- System Y.CT firmy YXLON International GmbH [www.yxlon.com].
- Tomografy firmy Wenzel Volumetrik GmbH [www.wenzel-group.com],
-Systemy TomoScope i TomoCheck firmy Werth Messtechnik [www.werth.de],
- Tomografy firmy Viscom Technology [www.viscom.com],
- Tomografy firmy North Star Imaging,Inc [www.xviewct.com],
- Tomografy firmy Saki Corporation [www.sakicorp.com].
Tomografy produkcji firmy C.Zeiss
Firma C. Zeiss [W3] wytwarza dwa rodzaje tomografów TC - model 800 i model 1500.
Na rys. IX.19 przedstawiono ogólny widok jednego z tomografów Metrotom.
Rys. IX.19. Ogólny widok jednego z tomografów METROTOM firmy C.Zeiss [W3]
Tomograf komputerowy METROTOM® jest wyposażony, tak jak każdy inny tomograf,
w lampę rentgenowską, cyfrową matrycę detektorów oraz układ mechaniczny pozwalający
na przemieszczanie mierzonego przedmiotu, a składający się z obrotowego stołu
pomiarowego i układu przesuwnego. Podczas obrotu stołu z przedmiotem wykonywane są
zdjęcia rentgenowskie 2D, na podstawie których powstaje przestrzenny model badanej części.
Otrzymany po rekonstrukcji model może być użyty w defektoskopii do oceny wymiarów
badanej części, porównania z modelem CAD lub do utworzenia modelu 3D w zakresie tzw.
inżynierii odwrotnej (reverse engineering). Ze względu na wymogi bezpieczeństwa, całe
urządzenie jest umieszczone w zamkniętej obudowie zabezpieczającej otoczenie przed
promieniami rentgenowskimi. Oprócz ochrony przed szkodliwym promieniowaniem,
404
obudowa urządzenia, wraz z odpowiednim układem klimatyzacji, zapewnia utrzymanie
stabilnej temperatury w przestrzeni pomiarowej w trakcie pomiaru. Dodatkowe zastosowanie
układu tłumienia drgań sprawia, że urządzenie może być zainstalowane praktycznie w
dowolnym miejscu zakładu produkcyjnego, uczelni, ośrodka badawczo-rozwojowego itp.
Ważniejsze parametry techniczne tomografów Metrotom przedstawiono w tabl.IX.2
Tablica IX.2. Ważniejsze parametry techniczne tomografów firmy C.Zeiss
Lampa rtg
Matryca detektorów
METROTOM 800
130kV/39W
1900×1512 pikseli
Zakres pomiarowy przedmiotu
Zakres przemieszczania przedmiotu
Odległość od detektora
Ø125×150 mm
290 mm
800 mm
METROTOM 1500
225kV/225W
1024×1024 pikseli
opcja 2014×2048
Ø300×350 mm
150 mm
150 mm
Tomograf Metrotom pozwala na uzyskanie dwuwymiarowych i trójwymiarowych
obrazów mierzonych obiektów. W przypadku obrazu trójwymiarowego można dokonać
przekroju w dowolnym jego miejscu, dzięki czemu uzyskuje się wymiary wewnętrzne
niemożliwe do uzyskania pomiarów metodami konwencjonalnymi. Mając trójwymiarowy
model, otrzymany za pomocą pomiaru tomograficznego, system Metrotom umożliwia jego
porównanie z modelem CAD. Dzięki temu można porównać te wymiary i przedstawić w
postaci mapy odchyłek od wymiaru nominalnego (rys. IX.20).
Rys .IX.20.Widok zmierzonego przedmiotu w porównaniu z modelem CAD [W3]
Oprócz pomiarów geometrycznych Metrotom umożliwia wykonywanie badań również
w zakresie defektoskopii w celu wykrycia nieciągłości i porowatości materiałów metalowych
(rys. IX.21). Umożliwia również przeprowadzenie kontroli poprawności montażu różnego
rodzaju elementów elektronicznych, plastikowych, złącz elektrycznych, itp.
405
Rys. IX.21. Przykład przedmiotu z wykrytymi wadami materiału [W3]
Każdy tomograf jest wyposażony w odpowiednie oprogramowanie. W przypadku
tomografów Metrotom są to oprogramowania Calypso, Volume Graphics Studio Max i
Dimension (rys. IX.22).
Program CALYPSO, obsługujący również współrzędnościowe maszyny pomiarowe
firmy C.Zeiss, przeznaczony do tradycyjnych pomiarów współrzędnościowych, umożliwia
również porównanie otrzymanych wyników z modelem CAD. Po dokonaniu pomiarów
generowany jest raport pomiarowy zawierający informacje o wymiarach, i spełnianiu przez
nie narzuconych wymagań. Calypso ma również możliwość tworzenia planu pomiaru CNC,
tj. pomiaru automatycznego. Wyniki pomiaru przedstawiane są w postaci kolorowych
obszarów, którym odpowiadają konkretne ich wartości liczbowe jak to jest widoczne na
rys.IX.20 (prawa strona ekranu).
System Metronom umożliwia wykonywanie pomiarów części maszyn z dopuszczalnym
błędem granicznym określonym zależnością MPE E=[(4,5‚9)+L/50)] µm, gdzie: L mierzony
wymiar w mm.
DefectAnalysis
Assembly
Control
Metrology
CAD Comparison
STLExtraction
Reverse
Engineering
Standard RE
Softwarepackages
Industrial Metrology
NDT
(Non destructive Testing)
Rys. IX.22 Pakiety oprogramowań tomografów METROTOM [W3]
Reverse
Engineering
406
Dla celów inżynierii odwrotnej oferowany jest standardowy pakiet oprogramowania o
nazwie DIMENSION.
Tomograf wyznacza nie tylko wymiary zewnętrzne mierzonego przedmiotu, lecz
również, poprzez penetracje w głąb przedmiotu, wymiary wewnętrzne, w tym np. grubości
ścianek przedmiotu.
Firma C.Zeiss stosuje niektóre z pakietów oprogramowań VGStudio Max, przede
wszystkim te, które obejmują badania z zakresu defektoskopii oraz dodatkowo badania
połączeń znajdujących się w obiekcie. Umożliwia to tym samym ocenę jakości montażu
zespołów mechanicznych i elektrycznych oraz jakości połączeń zespołów elektronicznych.
Tomografy produkcji firmy Nikon
Firma NIKON Metrology [W21] oferuje trzy rodzaje tomografów o symbolach XT V
130C, XTV160, XTV160NF przeznaczone w zasadzie do potrzeb przemysłu elektronicznego.
Wyposażone są w lampy rtg o mniejszych mocach i napięciach zawierających się w
przedziale od 130 kV do 160 kV. Natomiast druga grupa tomografów składająca się z pięciu
ich rodzajów o symbolach XT H 225, XT H 225ST, XT H 320, XT H 450, MCT225 i
MCT225HA przeznaczona jest do zastosowań w przemyśle maszynowym, szczególnie
motoryzacyjnym. Na uwagę zasługuje jeden z tomografów o napięciu lampy z mikrofokusem
wynoszącym 750 KV, który pozwala badać materiały stalowe do grubości 60mm, a
aluminiowe do 160 mm. Tomograf ten przeznaczony jest do pomiaru elementów turbo
ładowarek, sprężarek, samochodowych odlewów aluminiowych, łopatek śmigłowców i
silników odrzutowych, itp.
Na rys. IX.23 zaprezentowano jeden z wymienionych rodzajów tomografów o symbolu
XT H 225.
Tomograf XT H 225 wyposażony jest w lampę rtg o napięciu wynoszącym 225 kV.
Rozmiar plamki promieniowania wynosi 5 µm. Pozwala on na rozpoznawanie wad o
wymiarach wynoszących nawet 1µm przedmiotów o masie do 15 kg i maksymalnych
wymiarach 250x330 mm. Powiększenie geometryczne wynosi 160 x, a tzw. systemowe 400
x. Wymiary gabarytowe tomografu wynoszą 1830x875x1987 mm.
Rys .IX.23. Tomograf XT H225 firmy Nikon Metrology [W21]
407
Tomografy wymienionej serii wyposażone są w oprogramowanie VG StudioMax z
opcjami do wyznaczania wymiarów przedmiotu w tym do wyznaczania cienkościennych
elementów oraz do całego pakietu defektoskopii.
Na rys. IX.24 przedstawiono przykłady zastosowań tomografu X TH 225.
a)
b)
c)
a)
d)
Rys. IX.24. Przykłady zastosowań tomografu X TH 225 [W21]
Tomograf z serii XT H umożliwia wykonywanie pomiarów elementów odlewanych
(rys. IX.24a), łopatek turbin (rys. IX.24b), plastikowych elementów, w tym przypadku
plastikowych obudów (rys. IX.24c) oraz przeprowadzenie oceny jakości montażu zespołów
montażowych (rys. IX.24d).
Tomografy produkcji firmy GE Measurement & Control Solutions
Firma Phoenix|X-ray stanowi linię produktów firmy GE Measurement & Control
Solutions koncernu General Electric [A13,W8]. Powstała pod koniec lat 90, XX wieku w
Wunstorf (Niemcy), gdzie do dziś mieści się jej główna siedziba, produkcja oraz dział badań i
rozwoju. Firma ta oferuje sześć rodzajów tomografów grupy micro- i nanofocus oraz osiem z
grupy podstawowej o nazwach phoenix nanotom m, phoenix nanotom s, v|tome|x L240,
v|tome|x L300, v|tome|x L450, v|tome|xs,
v|tome|xm i v│tome│xc. Na rys.IX.25
przedstawiono dwa z nich.
Tomograf nanotom│m jest wyposażony w lampę rtg o napięciu 180 kV i mocy 15 W
(lampa typu otwartego) i może mierzyć drobne przedmioty o masie do 3kg głównie z
tworzywa i materiałów lekkich o maksymalnych wymiarach x=250 mm i średnica 240 mm.
Odległość ogniskowa od 150 do 600 mm, a minimalny rozmiar woxela 0,3µm. Najmniejszy
rozmiar wykrywanego wtrącenia 0,2 µm. Geometryczne powiększenie (3D) od 1,5 do 300
razy. Tomograf o masie 1900 kg ma rozmiary 1,98mx1,6mx0,9m. Promieniowanie X nie
przekracza dawki 1µSv/h w odległości 10 cm od obudowy. Tomograf wyposażony jest w
oprogramowanie o nazwie datos|x2. Możliwości tomografu w zakresie defektoskopii
pokazuje rys. IX.26, przedstawia on przykłady pomiarów obiektów wykonanych z tworzywa
408
sztucznego wzmocnionego włóknem szklanym (rys. IX.26a) o wymiarach włókien
wynoszących 10µm.
a)
b)
Rys. IX.25. Tomografy firmy GE Measurement & Control Solutions: a) nanotom│m, b) v|tome|xs [W8]
Rys. IX.26b przedstawia kompozyt z włóknem szklanym. Włókna zaznaczone są
kolorem niebieskim, a matrycy z żywicy kolorem pomarańczowym. Widoczne są obszary
puste jako ciemne wgłębienia. Tomograf może mierzyć i badać również elementy z metalu
jak i z tworzyw, np. o niedużych rozmiarach koła zębate.
a)
b)
Rys. IX.26. Przykłady zastosowań tomografu Nanotom do oceny przedmiotów wykonanych z kompozytów z
włóknem szklanym [W8]
Tomograf v|tome|xs widoczny na rys. IX.25b jest wyposażony w kombinacje dwóch
lamp typu otwartego, a mianowicie w lampę rtg typu mikrofokus o napięciu 240 KV i mocy
320 W oraz w lampę 180 kV i mocy 15 W. Tomograf może mierzyć przedmioty o masie do
10 kg o maksymalnych wymiarach x=420 mm i średnica 135 mm. Geometryczne
powiększenie dla 2D od 1,46 do 180 razy i dla 3D od 1,46 do 100 razy. Tomograf o masie
2900 kg ma rozmiary 2,33 m × 1,69m × 1,48m. Promieniowanie X nie przekracza dawki
1µSv/h w odległości 10 cm od obudowy. Tomograf wyposażony jest w oprogramowanie o
nazwie Phoenix datos|x2 CT oraz x|act uAXI.
Kolejny tomograf o symbolu v│Tome│x L300 przedstawiono na rys. IX.27.
409
Rys.IX.27. Tomograf o symbolu v│Tome│x L300 z serii Phoenix-xray [W8]
Tomograf ma zainstalowaną unipolarną mikroogniskową lampę o napięciu 300 kV i
mocy 500 W przeznaczoną do silnie absorbujących obiektów. Maksymalny rozmiar voxela
wynosi 2 µm (jest opcja 1 µm stosowna w zależności od wielkości przedmiotu). Maksymalny
rozmiar mierzonego obiektu wynosi 600 mm x 500 mm, o dopuszczalnej masie 50 kg.
Tomograf może być wyposażony w liniowy detektor lub płaski panel detektorów z
przeznaczeniem do kontroli 2D oraz 3D. Jest on przeznaczony do zaawansowanych badań
powierzchni (opcja). Jest możliwa analiza wariancji, a dzięki zastosowaniu odpowiedniego
oprogramowania - szybkie generowanie danych i rekonstrukcja trójwymiarowa.
Klasyczna aplikacja tomografów komputerowych to kontrola, na podstawie
trójwymiarowych pomiarów, odlewów z metalu i tworzyw sztucznych. Jednakże wysokiej
rozdzielczości technologia rentgenowska phoenix|x otwiera możliwości zastosowania w wielu
nowych dziedzinach, takich jak technologia czujników, elektronika, badania materiałów oraz
wielu innych. Na rys. IX.28 przedstawiono „wgląd” w budowę sondy lambda. Możliwa jest
ocena geometrycznego montażu sondy oraz ocena stanu czujników ceramicznych.
Rys. IX.28. Obraz montażu sondy lambda [W8]
Tomograf Tome│x│L300 pokazuje połączenia lutowane CSP-komponentów.
Trójwymiarowy kształt stanów lutowia wynoszący około 400µm średnicy są wyraźnie
410
widoczne. Tomograf umożliwia badanie łopatek turbin, które są złożonymi odlewami, a które
muszą spełniać najwyższe wymagania bezpieczeństwa. Tomografia komputerowa umożliwia
przeprowadzenie nieniszczącej analizy poprzez precyzyjny pomiar 3D.
Tomografy opisywanej firmy wyposażone są w wielomodułowe oprogramowanie
datos│x 2.0 obejmujące proces sterowania tomografem i oczywiście przetwarzaniem
uzyskanych wyników aż do uzyskania ich graficznej i liczbowej postaci.
Tomografy produkcji firmy Yxlon International
Firma YXLON [W34] wytwarza kilkanaście rodzajów tomografów komputerowych
zarówno kabinowe jak i tzw. z otwartą przestrzenią o następujących symbolach: FF20CT,
FF35CT, Y.CT Compact, Y.CT Precision, Y.CT Modular, Y.CT Tire, Y.CT Customized,
Y.Cheetah, Y.Cougar, YXlon MU 60 AE i Y.MU200D. Mają one charakter uniwersalny,
jednak część z nich jest specjalizowana np. tomografy z serii MU i CT Tire z przeznaczeniem
do kół samochodowych, lub też tomografy przeznaczone do elementów wysokich (tomograf
Y.C Vertical).
Na rys. IX.29 przedstawiono jeden z uniwersalnych tomografów o nazwie Y. CT
VARIO. Można nim mierzyć i badać przedmioty o masie do 10 kg o wymiarach – wysokość
do 250mm i maksymalnej średnicy 180 mm (występuje opcja pozwalająca na mierzenie
przedmiotów o średnicy do 320 mm). W tomografie zainstalowano lampę rtg o chłodzeniu
wodno-powietrznym i o napięciu od 10 do 225kV. Wymiary ogniska, mocy i prądu mogą być
następujące:
80µm/290W/1,3mA;
95µm/540W/2,4mA;
150µm/1020W/4,5mA;
320µm/1600W/7,1mA. Tomograf wyposażony jest w obrotowy stół pomiarowy o średnicy
300 mm. Matryca detektorów firmy Yxlon ma wymiary 244x195mm, a liczba pikseli o
rozmiarze 127 µm wynosi 1920. Tomograf o masie 4,5 t ma wymiary 1,95x1,6x1,86 m.
Stosowane jest oprogramowanie własne o nazwie YXLON CT37.
Rys.IX.29. Tomograf Y.CT Vario firmy Yxlon International [W34]
Tomograf Y.CT Vario, jak i inne tomografy tej firmy pozwalają na wykonywanie
pomiarów przedmiotów z różnych materiałów, zarówno metalowych jak i tworzyw
sztucznych. Na rys.IX.30 przedstawiono przekroje metalowych przedmiotów jako odlewów.
Dokonywanie kolejnych przekroi pozwala na ocenę drożności kanałów, wymiarów ścian i
oczywiście wewnętrznych wad odlewów.
411
Do pomiarów przedmiotów o większych gabarytach i masach np. do 30kg i wysokości
do 500mm lub 750mm przeznaczone są tomografy o nazwie Y.CT Compact. Do bardzo
wysokich i smukłych elementów proponuje się tomograf Y.CT Vertical (obecna nazw Y.CT
Customized), który może mierzyć przedmioty nawet o wysokości 3m.
Rys.IX.30. Przykładowe przekroje badanych przedmiotów [W34]
Specjalną grupę stanowią tomografy przeznaczone do pomiaru kół samochodowych,
zarówno felg jak i opon. Są to tomografy serii Y.CT TIRE.
Na rys. IX.31 przedstawiono jeden z nich, a mianowicie tomograf Y.TC MU 2000,
który umożliwia mierzenie różnorodnych elementów z obszaru przemysłu motoryzacyjnego
(rys. IX.32).
Możliwe jest mierzenie przedmiotów o wymiarach 600x900 mm, których masa może
dochodzić nawet do 60 kg.
Tomograf wyposażony jest w lampę rtg o maksymalnym napięciu wynoszącym
160V/10 mA, która jest chłodzona wodą.
Rys.IX.32. Przykładowe przedmioty, które mogą być
mierzone za pomocą tomografu Y.CT MU 2000 [W34]
Rys.IX.31. Tomograf o symbolu Y.TC MU
2000 firmy Yxlon [W34]
Wymiary tomografu wynoszą 2,2x2,7x1,8 m, a jego masa - 4t. Pomiar kół może być
zautomatyzowany zarówno w zakresie transportu na stanowisko pomiarowe jak i przebiegu
procesu pomiarowego. Bada się nie tylko felgę ale również oponę pod względem wad, np. w
celu wykrycia ewentualnych rozwarstwień w strukturze materiału.
Na uwagę zasługują tomografy serii Y CT Modular, które wykonywane są w czterech
odmianach różniących się zakresem pomiarowym i masą mierzonych przedmiotów.
412
Firma Yxlon oferuje dodatkową zaawansowaną wersję oprogramowania PXV5000 do
automatycznej inspekcji części odlewanych (wersja 3.8). Filtr ADAMO umożliwia
wykrywanie wad materiału. Możliwe jest automatyczne tworzenie katalogu zawierającego
wyniki inspekcji w formacie PDF.
Tomografy firmy WENZEL Volumetrik
Niemiecka firma WENZEL Volumetrik [W32] oferuje przemysłowy tomograf
komputerowy o nazwie exaCT przedstawiony na rys. IX.33, który jest przeznaczony zarówno
do przeprowadzania badań nieniszczących, inżynierii odwrotnej oraz badania zewnętrznych i
wewnętrznych struktur przedmiotów. Tomograf komputerowy exaCT jest oferowany razem z
biurkiem pomiarowym ułatwiającym pomiar i dostęp do tomografu. Jako całość
charakteryzuje się kompaktową zwartą budową zajmującą względnie mało przestrzeni
bowiem razem z biurkiem wynosi ona 2300×1290×1460mm. Natomiast sama stacja
pomiarowa ma wymiary 1500×1100×1670 mm. W zależności od kombinacji rodzajów
zamontowanych lamp rentgenowskich oraz detektorów wyróżnia się cztery warianty
dokładności urządzenia co umożliwia dostosowanie tomografu komputerowego do
indywidualnych wymagań klientów.
Do obszaru zastosowań exaCT, podawanego przez producenta zalicza się następujące
działy: systemy zapewnienia jakości, rozwoju, prototypowania, pierwszych prób produkcji
wyrobów, montażu, itp. Tomograf komputerowy exaCT przeznaczony jest dla użytkowników
przemysłowych zajmujących się budową maszyn, produkcją samolotów i samochodów i
obejmuje odlewnictwo, przetwórstwo metali i tworzyw sztucznych, wytwarzanie form i
narzędzi, ceramikę, materiały kompozytowe, a nawet drewno i materiały budowlane (gips,
żywica, itp.). Przewidziany jest w zastosowaniach w elektrotechnice i elektronice, a nawet w
medycynie. Może być zastosowany w ośrodkach prowadzących badania naukowe oraz w
ośrodkach świadczących usługi pomiarowe.
Rys.IX.33. Tomograf exaCT firmy WENZEL Volumetric [W32]
Tomograf exaCT wyposażony jest w lampę rtg o napięciu wynoszącym 225 kV. Można
wykonywać pomiary przedmiotów o maksymalnej średnicy 250mm i o wysokości 300 mm.
Oprócz modelu exaCT występującego pod nazwą CT-Workstation exaCT oferowane są
jeszcze dwa modele pod nazwą Desktop–CT exaCT S i Desktop–CT exaCT XS przeznaczone
413
do badań małych elementów np. z tworzyw sztucznych, tj. elementów o małej gęstości. Ich
gabaryty pozwalają na zainstalowanie ich na dowolnym typowym biurku.
Duży nacisk kładziony jest na wydajność i użyteczność systemu. Optymalne
wykorzystanie potencjału tomografów komputerowych możliwe jest dzięki dedykowanemu
oprogramowaniu do standardowej geometrii wymiarów i defektoskopii pod nazwą Metrosoft
QUARTIS oraz w zakresie inżynierii odwrotnej i analizy modeli CAD oprogramowanie
PointMaster. Może być także dostarczone dodatkowe oprogramowanie, stosowane przez
wielu wytwórców tomografów, a mianowicie oprogramowanie VG Studio MAX.
Tomografy firmy WERTH Messtechnik
Niemiecka firma WERTH Messtechnik [W33] oferuje pięć rodzajów tomografów CT o
następujących nazwach: TomoScope 200, TomoCheck HA 200, TomoScope HV Compact
(rys. IX.34), TomoScope HV 500 i otwarty tomograf Tomo Scope HV 800.
Rys. IX.34. Tomograf komputerowy CT TomoScope HV Compact firmy WERTH Messtechnik [W33]
Tomografy firmy Werth stanowią połączenie współrzędnościowych maszyn
pomiarowych dla wyznaczania wartości wymiarów w zakresie XYZ oraz tomografu głównie
działającego w zakresie defektoskopii. Na rys.IX.35 uwidoczniono fragment konstrukcji
współrzędnościowej – widoczna jest pinola z głowicą pomiarową (zwykle jest nią głowica
TP200 firmy Renishaw) działająca stykowo.
Rys.IX.35. Fragment tomografu z widoczną konstrukcją układu do pomiarów współrzędnościowych [W33]
414
Przedstawiony na rys. IX.34 tomograf ma zakres pomiarowy wynoszący Ømax ok. 327
mm, i Lmax ok. 517 mm. Pomiary współrzędnościowe wykonywane są na poziomie
dopuszczalnego błędu granicznego wynoszącego E 3=MPEE=(4,5+L/75) µm, gdzie L jest
mierzona długością w mm. Podany poziom błędu jest zachowany, gdy temperatura jest
utrzymana w granicach 20oC±2oC. Masa mierzonego przedmiotu nie powinna przekraczać
40kg, chociaż występuje opcja umożliwiająca mierzenie przedmiotów o masie dochodzącej
do 75kg. W tomografie zainstalowano lampę o maksymalnym napięciu wynoszącym 225kV i
konsumpcji 30W. Możliwe jest badanie przedmiotów o znacznej gęstości, jak stal, tytan
elastometry, tworzywa hybrydowe, ceramika, tworzywa sztuczne wzmacniane włóknem
szklanym, itp.
Najmniejszy z tomografów TomoScope 200 ma zakres pomiarowy Ømax ok.204mm i
Lmax ok.398mm. Mogą być mierzone przedmioty o masie do 2kg. Zamontowana lampa
może osiągać napięcie od 130 do 225kV. Tomograf ma masę wynoszącą 2,5t.
Tomografy TomoScope 200 oraz TomoCheck HA 200 mogą mierzyć przedmioty
wykonane z tworzyw sztucznych, lekkich metali oraz elementów z grafitu. Natomiast
tomografy serii TomoScope HV Compact i TomoScope HV 500 przeznaczone są do
pomiarów komponentów wysokiej gęstości, takich jak stal, aluminium, tytan, elastomery,
ceramika i tworzywa z włóknem szklanym, itp. Natomiast tomograf otwarty (rys. IX.36)
TomoScope HV 800 przeznaczony jest do pomiarów detali o dużych wymiarach
(Ømax=500m, Lmax=1010 mm) i komponentów o dużej gęstości.
Rys.IX.36. Widok tomografu TomoScope HV 800 [W33]
Firma Werth stosuje oprogramowanie o nazwie WinWerth pracujące pod systemem
operacyjnym Windows XP. Wyniki pomiaru są reprezentowane zarówno w formie graficznej
oraz numerycznej (dane tabelaryczne). Dzięki takim formatom danych jest możliwe
zaimplementowanie korekt bezpośrednio do obrabiarki czy centrum obróbkowego. Moduł
Werth CAD-Offline pozwala na tworzenie planów pomiarowych poza maszyną pomiarową
bez konieczności posiadania detalu. Wystarczy dysponować modelem CAD, by na nim
zaznaczać elementy geometryczne przewidziane do zmierzenia.
415
Tomografy firmy VISCOM
Niemiecka firma VISCOM [W30] oferuje dwie serie tomografów komputerowych.
Jedna z nich o symbolu X8011 obejmuje trzy konfiguracje tomografów różniących się
głównie parametrami lampy rtg. Tomograf X8011-12 (rys. IX.37) jest wyposażony w lampę o
zakresie napięcia 10‚120kV. Następne modele tej serii mają następujące lampy: model X01116 10‚160 kV, model X8011-20 10‚200 kV.
Druga seria o symbolu X8060 (rys. IX.38) obejmuje cztery rodzaje tomografów
również jak poprzednie różniących się napięciem anodowym lamp. Wartości napięć dla
poszczególnych modeli zawierają się w następujących przedziałach: 10‚160 kV, 10‚200 kV,
10‚225 kV i 10‚250 kV.
Pozostałe parametry podawane są wspólnie dla poszczególnych serii tomografów
komputerowych, których zestawienie przedstawione jest w tabl. IX.3.
Rys.IX.38. Tomograf TC serii X8060
firmy Viscom [W30]
Rys.IX.37. Tomograf TC serii X8011
firmy Viscom [W30]
Tablica IX.3. Ważniejsze parametry techniczne tomografów firmy VISCOM
Parametry lampy
Rozmiar plamki
Rozpoznawanie
szczegółów
Powiększenie
Detektor
Maksymalna wielkość
badanych przedmiotów
Maksymalna masa
badanych przedmiotów
Zasilanie
Wymiary tomografu
Masa tomografu
Zakres temperatury
Zakres wilgotności
X8011CT
10‚200kV, 5-1000μA, 40W
1-3 μm
0,5-1 μm
X8060 NDT
10‚250V, 5-3000μA, 40-500W
2-5 μm
1-2 μm
2 500×
6″/9″
460 mm × 580 mm
4 000×
6″/9″, 12/14/16 bitowe
660 mm × 510 mm
10 kg
30 kg
230VAC, 16A, 50/60Hz
1050×1462×1900 mm
1 600 kg
10‚35oC
20‚80%
230/400VAC, 16A, 50/60Hz
2210×1970×1890 mm
4 000 kg
10‚35oC
20‚80%
416
Tomografy serii X8011 służą do badań
przedmiotów o stosunkowo małych
wymiarach, głównie jednak do badania różnego rodzaju zespołów i komponentów
elektronicznych, np. do oceny jakości połączeń (rys. IX.39), do wykrywania nadmiaru lutu i
wtrąceń innych materiałów.
Rys.IX.39. Przykłady elektronicznych zespołów badanych na tomografach serii X8011 firmy Viscom [W30]
Natomiast tomografy serii X8060 przeznaczone są do pomiarów i badań części maszyn
jak to ilustruje rys. IX.40 odnoszący się do pomiaru wirnika turbiny.
Rys. IX.40.Wyniki pomiaru wirnika turbiny tomografem serii X8060 firmy Viscom [W30]
Górne zdjęcia przedstawiają model 3D mierzonego wirnika oraz uzyskany z pomiaru
model, dwa dolne zdjęcia ilustrują wykryte wady wirnika – z lewej strony pokazane są
nieciągłości uzyskane z modelu 3D, zaś z prawej strony rezultaty pomiaru 2D widoczne jest
pęknięcie elementu.
Podstawowym oprogramowaniem tomografów firmy Viscom jest ViscomXMC
bazujący na oprogramowaniu systemowym Windows. Natomiast komunikacja pomiędzy
urządzeniem a systemem realizowana jest poprzez system Ethernet.
Tomografy firmy North Star Imaging Inc.
Amerykańska firma North Star Imaging, Inc. [W22] oferuje tomografy komputerowe
zarówno stacjonarne jak i przeznaczone do zastosowań w liniach kontrolnych. Wytwarza
tomografy do różnych zastosowań i tym samym o różnych mocach lamp rtg i zakresach
pomiarowych od najmniejszych jak tomograf o symbolu ImagiX, do największych typu
suwnicowego np. o symbolu X 7000.
Dominującą grupę stanowią tomografy serii X-view, w skład której wchodzą tomografy
o symbolach X25, X50, X5000, X6000 i X7000.
417
Tomograf X50 przedstawiony na rys. IX.41 przeznaczony jest do pomiarów
przedmiotów o wymiarach do 300 mm i masie do 11 kg takich jak elementy medyczne,
elementy i zespoły elektroniczne, komponenty przemysłu lotniczego itp. Mogą być badane
elementy wykonane również ze stali, w tym elementy odlewane jak i konstrukcyjne.
Rys. IX.41. Tomograf komputerowy X50 z serii X-view CT [W22]
Tomograf X50 jest wyposażony w lampę o napięciu 10‚240 kV. Maksymalne geometryczne
powiększenie wynosi 4000×. Ogólna maksymalna rozdzielczość jest lepsza niż 1 µm.
Na rys. IX.42 przestawiono przykłady wyników pomiaru urządzenia medycznego oraz
komponentu lotniczego.
Rys.42. Przykłady pomiaru elementów za pomocą tomografu X50-CT [W22]
Na rys.IX.43 przedstawiono kolejny tomograf o symbolu ImagiX. Jest on przeznaczony
do badania małych przedmiotów o wymiarach od 0,5 do 150 mm i masie do 4,5 kg. Panel
detektorów ma wymiar 250x250 mm. Rozmiar pikseli wynosi 50 µm. Maksymalna
rozdzielczość wynosi 1 µm. Zastosowana lampa jest na napięcie 10‚150 kV.
Rys.IX.43. Tomograf komputerowy CT o symbolu ImagiX [W22]
418
System tomografu ImagiX dokonuje rekonstrukcji 3D badanego elementu oraz poprzez
zastosowanie dedykowanego oprogramowania dającego możliwość, oprócz wykrywania wad
w materiale badanego obiektu, również dokonania przekształceń dla potrzeb inżynierii
odwrotnej oraz porównania otrzymanych wyników z modelem CAD.
Na uwagę zasługuje kolejny tomograf o symbolu X7000 realizujący pomiary
współrzędnościowe 3D, inżynierię odwrotną, porównania z modelem CAD, itp. Tomograf
ten o lampie o napięciu 10‚450 kV ma szerokie możliwości penetracji w głąb materiału, a
system komputerowy pozwala na uzyskanie wszystkich opcji przekształceń i analizy
wyników. Na rys. IX.45 podano przykłady pokazujące możliwości tego tomografu odnoszące
się do przedmiotu pokazanego na rys. IX.44.
Rys. IX.44. Element, którego wyniki pomiarów przedstawiono na rys. IX.45 [W22]
Rys. IX.45 Wyniki pomiaru elementu przedstawionego na rys.IX.44 [W22]
Rys.IX.45 przedstawia wyniki pomiaru elementu pokazanego na rys.IX.44, a
wykonane za pomocą tomografu X7000. Podane są odchyłki wymiarowe od wymiaru
nominalnego będące wynikiem porównania z modelem CAD. Wartości odchyłek
reprezentowane są przez poszczególne kolory, dla których wartości w mm podane są na
wykresie pionowym widoczne z lewej strony rysunków, przy czym wzrost wartości odchyłek
na plus „biegnie” w kierunku koloru czerwonego, a na minus niebieskiego.
Oprogramowanie o symbolu efx oferuje dwa tryby skanowania EasyCT i AdvancedCT.
Pierwszy z nich obejmuje pięciostopniowy proces, począwszy od stworzenia projektu do
ostatecznego wyniku. EasyCT prowadzi użytkownika przez proces kalibracji i rekonstrukcji
dzięki interaktywnym interfejsom procesów automatycznych. W dowolnym momencie może
nastąpić przełączenie na tryb bardziej zaawansowany o nazwie AdvancedCT.
419
Tomografy firmy Saki Corporation
Japońska firma Saki [W27] po przejęciu części produkcji niemieckiej firmy
MacroScience Technology oferuje głównie optyczne inspekcyjne skanery oraz automatyczne
inspekcyjne systemy oparte na promieniowaniu rtg o symbolu BF-X1, BF-X2, BF-X3.
Starszy model BF-X1 (rys.IX.46) o rozmiarach wynoszących 2390 mm × 1690mm ×
1475 mm i masie 2 ton przeznaczony jest do badań i pomiarów małych przedmiotów o masie
do 2 kg, głównie jednak do zespołów elektronicznych - do oceny jakości montażu, głównie
jakości połączeń lutowniczych na płytkach drukowanych. Wyposażony jest w nowy rodzaj
detektora promieniowania rentgenowskiego o symbolu XEye zaprojektowanego w Instytucie
Fraunhofera. Ma wiele funkcji, zawiera 4 mega pikseli w postaci 6 bitowych danych, dużą
rozdzielczość, bo wynosząca 5‚25 µm. Tomograf wyposażony jest w lampę rtg o napięciu
160 kV (opcjonalnie 225 kV). Lampa wyposażona jest w trzystopniowy system migawki
(zasłon), dla zabezpieczenia przed promieniowaniem podczas załadunku i wyładunku i
zapewnia bezpieczeństwo użytkownika z poziomu „wycieków” niższego niż 0.2μSv / h.
Rys. IX.46. Widok tomografu o symbolu BF-X1 firmy Saki Corporation [W27]
Zbliżone parametry ma tomograf o symbolu BF-X2, wyposażony w lampę chłodzoną
wodą o napięciu 160 kV lub 225 kV. Tomograf ten może być stosowany w ciągłych
systemach kontroli rentgenowskiej przedmiotów odlewanych zarówno z metalu jak i z
tworzyw sztucznych, a także ceramiki. Może być zintegrowany z systemem transportu
wytwarzanych elementów, np. przez roboty obsługowe lub system przenośników. Oprócz
możliwości uzyskania wymiarów kontrolowanych części możliwe jest wykrywanie wad
tkwiących w materiale badanego przedmiotu.
IX.4. Funkcje pomiarowe i ich oprogramowania
Pełny pakiet oprogramowań do zadań metrologicznych, tj. z pominięciem oprogramowań
sterujących, obejmuje następujące cztery podstawowe grupy operacji:
- standardowa geometria wymiarów,
- porównywanie wyników z modelami CAD,
- defektoskopia,
- inżynieria odwrotna.
Każdy z producentów tomografów oferuje określone, najczęściej własne
oprogramowanie, chociaż spotyka się oprogramowania uniwersalne zalecane do stosowania
420
przez szereg producentów tomografów. Często do oprogramowań własnych załączane są
oprogramowania uzupełniające opracowane przez firmy specjalizujące się ich
przygotowywaniem. Przykładem może być firma C.Zeiss, która do wyznaczania wymiarów
stosuje swoje oprogramowanie CALYPSO, a do pozostałych zadań, głównie do szeroko
pojętej defektoskopii, oprogramowanie VGStudio MAX. Natomiast do inżynierii odwrotnej
program DIMENSION.
Firma Metris-Nikon bazuje na oprogramowaniu Inspect-X, chociaż w ofercie występuje
także uniwersalne oprogramowanie, jakim jest VG StudioMAX. Firma GE Sensing
&Inspection Technologies GmbH stosuje oprogramowanie o symbolu datos│x 2.0. Firma
Werth Messtechnik korzysta z programu WinWerth, a firma Viscom oferuje oprogramowanie
o symbolu Viscom XMC. Natomiast tomografy komputerowe firmy North Star Imaging Inc.
obsługiwane są przez program efx-CT. Kolejna z firm Wenzel Volumetrik do obsługi swego
tomografu oferuje program Quartos i VG Studio Max, a firma Yxlon oprogramowanie Yxlon
CT37.
Standardowa geometria wymiarów, tak jak w klasycznej technice współrzędnościowej
opiera się na założeniu, że typowy przedmiot mechaniczny typu korpusowego składa się z
punktów, prostych, płaszczyzn, okręgów, sfer kulistych, stożków, itp. i przez odpowiednie
aproksymacje, na podstawie współrzędnych uzyskanych z pomiaru punktów, uzyskuje się
wymagane wymiary. Mając współrzędne środków lub wymienionych figur można wyznaczyć
odległości między nimi, a także wymagane przekroje i rzuty dające podstawy do analizy
wymiarowej badanego obiektu [25,26,30,A29,A32,A54,A51,A55,A116].
Bardziej zaawansowane pomiary przy użyciu pakietu GEAR PRO oprogramowania
Calypso firmy C.Zeiss ilustruje rys. IX.47, który przedstawia wyniki pomiaru koła zębatego.
Rysunek ten pokazuje możliwości tego programu, który pozwala na wyznaczenie wymiarów
bezpośrednio korzystając z wprowadzonych danych nominalnych lub z porównania z
modelem CAD. Na uwagę zasługuje uzyskanie nie tylko wartości odchyłek poszczególnych
parametrów koła zębatego (w tym przypadku zarysu ewolwenty), ale również graficznej
ilustracji przebiegu zmian zarysu, co pozwala na jakościową ocenę tego parametru
(rys.IX.48).
Rys. IX.47. Widok ekranu pomiaru koła zębatego
pakietu Gear Pro programu Calypso [W3]
Rys.IX.48. Widok ekranu z wynikami
liczbowymi i graficznymi pomiaru zarysu
zęba koła zębatego [W3]
Porównywanie wyników z modelami CAD odbywa się przez naniesienie na siebie
uzyskanej chmury punktów i wyłonionego z niej obiektu na znany model CAD, co umożliwia
szybkie porównanie uzyskanych wyników z bazą odniesienia, jaką jest model z wymiarami
nominalnymi. Oczywiście i w opcji standardowej geometrii wymiarów można uzyskać
421
porównanie z uzyskanymi z pomiaru odchyłkami z wymiarami nominalnymi, po uprzednim
jednak wprowadzeniu ich danych do komputera. Natomiast porównanie z modelem CAD
daje pełny obraz zmian wymiarów przedmiotu z zaznaczonymi odpowiednimi do wartości
odchyłek kolorami, jak to widać na rys. IX.49. Po prawej stronie ekranu na pasku pionowym
zaznaczone są wartości odchyłek odpowiednich dla danego koloru.
\
Rys.IX.49. Porównanie z modelem CAD na podstawie oprogramowania Calypso firmy C.Zeiss [W3]
Na przedstawionym obrazie CAD-owskim pokazane są kierunki odchyłek oraz ich
wartości, co pozwala na sprawdzenie czy wymiary badanego przedmiotu mieszczą się w
granicach tolerancji. Możliwe jest również stwierdzenie w jakim kierunku przesunięte są
wymiary badanego obiektu, a co za tym idzie, w jaki sposób należy wpłynąć na proces
produkcyjny w celu wyeliminowania braków w produkcji lub niedopuszczenia do ich
powstania.
Defektoskopia
Do badań związanych z szeroko pojętą defektoskopią zalicza się nieniszczące badania
obiektów, wykrywanie nieciągłości materiału, pęknięć, rozwarstwień, sprawdzanie
poprawności montażu, szukanie porów, wtrąceń innych materiałów, pęcherzyków powietrza,
itp., jak również badania struktury materiałów, badania paleontologiczne skamielin czy
obiektów organicznych oraz niektóre medyczne. Na rys. IX.50 przedstawiono przykłady
wyników badań przedmiotów w zakresie defektoskopii i jakości montażu przy zastosowaniu
często używanego w tomografii oprogramowania VGStudio MAX.
DefectAnalysis
Assembly
Control
NDT
Rys. IX.50.
Przykładowe
(Non destructive
Testing)
wyniki badań przedmiotów w zakresie defektoskopii [W3]
422
Możliwe jest wykrycie różnego rodzaju wtrąceń i wad materiału, ich charakteru,
rozmieszczenia i wielkości. Na podziałce (prawy rysunek) można odczytać wartości
charakteryzujące wymiary wtrąceń i wad w funkcji ich koloru.
Inżynieria odwrotna jest doskonałym, szybkim rozwiązaniem poradzenia sobie z budową
obiektu, gdy nie ma dostępnego modelu CAD. Podczas pomiaru badanego przedmiotu
otrzymywana jest tzw. chmura punktów, z której, w wyniku przeliczeń, uzyskuje się model
3D. Przy pomocy inżynierii odwrotnej są generowane krzywizny i węzły w rezultacie czego
na końcu procesu uzyskiwany jest model CAD wykrywany przez większość standardowych
programów.
Proces inżynierii odwrotnej składa się z kilku następujących kroków:
1. Zebranie tzw. chmury punktów i optymalizacja w celu poprawienia wydajności obliczeń i
zwiększenia płynności powierzchni.
Przez optymalizację rozumiane jest zmniejszenie liczby punktów poprzez filtrowanie
danych, np. usunięcie punktów o odległościach większych niż np. 0,2mm od pozostałych
punktów oraz usunięcie punktów znajdujących się w niższych obszarach krzywizny.
Przykład redukcji chmury punktów przedstawiono na rys.IX.51. Na rys.IX.51a widoczna
jest chmura punktów przed obróbką, a na rys.IX.51b chmura punktów po usunięciu
punktów znajdujących się w niższych obszarach krzywizny Z kolei rys.IX.51c pokazuje
chmurę punktów po zastosowaniu dodatkowego filtrowania. Zastosowanie filtru
zmniejszyło w tym przypadku liczbę punktów z ponad pięciu milionów do niespełna
jednego miliona punktów. Mimo pięciokrotnej redukcji liczby punktów szczegóły
obiektu są dobrze rozpoznawane.
2. Stworzenie siatki trójkątów poprzez łączenie punktów.
Istnieje możliwość iż podczas obróbki zostaną błędnie zinterpretowane otwory,
należy wtedy wprowadzić poprawki do uzyskanego modelu, możliwe jest zapełnienie
przestrzeni siatką wielokątów. Na rys.IX.52a przedstawiono przedmiot po zapełnieniu
powierzchni siatką trójkątów – widoczny jest efekt wygładzenia powierzchni
przedmiotu. Natomiast na rys.IX.52b przedstawiono rezultaty eliminacji tzw. dziur –
prawy rysunek jest ich pozbawiony.
a)
b)
c)
Rys.IX.51. Etapy redukcji liczby punktów [A101]
423
a)
b)
Rys.IX.52. Efekty procesu inżynierii odwrotnej: a) powierzchnia po wygładzeniu,
b) powierzchnia po eliminacji tzw. „dziur” [A101]
3. Dokonanie dalszego procesu wygładzania powierzchni, a przede wszystkim utworzenie
krawędzi, tj. obrysowanie krawędzi przez złożenie serii obrazów pochodzących z
kolejnych projekcji, obejmujące wyznaczenie krawędzi, krzywizn, prostych, itp. (rys.
IX.53). Proces ten jest wykonywany przez większość stosowanego w tomografii
oprogramowania. Dla złożonych elementów proces znajdowania krawędzi jest
stosunkowo czasochłonny.
Rys.IX.53. Obrysowanie krawędzi [A101]
W kolejnym kroku wygładzana jest przestrzeń pomiędzy zaznaczonymi krawędziami.
Uzyskany w taki sposób model 3D importowany jest do programu obsługującego modele
CAD. Jest to ostatni krok inżynierii odwrotnej. Dzięki takiemu badaniu uzyskiwany jest
model przydatny podczas szybkiego prototypowania, oraz badania nieznanych obiektów.
IX.5. Parametry charakteryzujące dokładność i metody ich wyznaczania
Według wytycznych VDI/VDE 2630 [N27] dokładność tomografów komputerowych
CT charakteryzują następujące cztery grupy parametrów:
1. Parametr związany z błędem pomiaru długości - E ,
2. Parametry związane z błędem skanowania - PF, PS,
3. Parametry określające zależności wymiarowo-materiałowe – GS, GF, GG,
4. Parametr określający rozdzielczość – Dg .
Parametry z grupy trzech pierwszych wyznaczane są dla dwóch układów tomografów:
a) dla 2D – płaskiej wiązki promieniowania – do parametru dodaje się TS np. PF(TS),
Pomiar określany jest jako w ‘obrazie’
b) dla 3D – stożkowej wiązki promieniowania - do parametru dodaje się TT, np. PF(TT)
Pomiar określany jest jako ‘na obrazie’
Parametr związany z błędem pomiaru długości – E
Tak jak w technice pomiarów współrzędnościowych – wg PN EN ISO 10360 [N13,
N14], błąd ten wyznacza się za pomocą wzorców materialnych długości.
Wyznaczona wartość błędu E jest porównywana z granicznym dopuszczalnym błędem
pomiaru długości o postaci
MPEE = ± (A+ L/K) µm
(IX.3)
gdzie: L - jest mierzoną długością podaną w milimetrach
424
Na przykład
dla tomografu METROTOM 800 firmy C.Zeiss zależność ta ma postać
MPEE = ± (4,5 + L/100) µm,
dla tomografu TomoScope HV firmy Werth
MPEE= (4,5+L/75) µm (dla 20oC±1oC)
Tak jak zaznaczono wcześniej błąd E wyznaczany jest za pomocą wzorców
materialnych długości, np. płytek wzorcowych, wzorców kulowych, stopniowych wzorców
walcowych,
wzorców o specjalnej konstrukcji, np. w postaci zestawu trzpieni pomiarowych
zakończonych elementami kulistymi.
W przypadku zastosowania wzorca długości w postaci płytki wzorcowej wiązka rtg
przechodzi przez cała długość wzorca jako pomiar odległości między dwiema przeciwległymi
powierzchniami (rys. IX.54), wyznaczając błąd E z zależności:
E = L a – Lr
gdzie: La –wyznaczona z pomiaru długość płytki,
Lr –wywzorcowana długość płytki.
(IX.4)
Rys.IX.54. Wzorzec końcowy do wyznaczania błędu E pomiaru długości [A101]
Ze względu na to, że wiązka promieniowania przechodzi przez całą długość płytki i ze
względu na ograniczoną przenikalność dla materiału ze stali, stosuje się płytki wzorcowe o
małych długościach, najczęściej poniżej 30mm.
Ograniczeń związanych z przenikalnością w dużym stopniu pozbawione są wzorce
składające się z zestawu kul. Na przykład zestawu dwóch kul jak to ilustruje rys. IX.55, dla
których wymiar wzorcowy stanowi odległość Lr między środkami kul.
•
Lr
•
Rys. IX.55. Wyznaczanie błędu pomiaru długości E za pomocą wzorców kulowych [A101]
Błąd E wyznacza się podobnie jak dla wzorców końcowych, tj. jako różnicę między
odległością wzorcową Lr a wartością uzyskaną z pomiaru La. Współrzędne środków kul
wyznacza się po zmierzeniu każdej z kul, a wyznaczone z aproksymacji sferą na podstawie
określonej liczby współrzędnych punktów zebranych na powierzchni kuli.
W przypadku zastosowania wzorców kulowych wyznaczanie pozycji środka kuli, w
odróżnieniu od wyznaczania położenia powierzchni na wzorcu końcowym, polega na
uśrednianiu i dopasowaniu kształtu i wymiarów. Wobec tego należy uwzględnić korekcję
425
efektu uśredniania oraz kompensację błędów systematycznych. Wytyczne VDI/VDE 2630
proponują dwie następujące procedury:
Procedura A
Polega ona na odwołaniu się do określonych wartości błędów skanowania (PS oraz
PF). Należy jednak zauważyć, iż właściwości wzorca, takie jak jego materiał, wielkość,
kształt oraz powierzchnia, podobnie jak strategia pomiarowa i podział punktów
pomiarowych, powinny być względnie jednakowe przy określaniu błędu pomiaru długości
jak i błędu skanowania.
Błąd pomiaru długości E składa się z:
różnicy pomiędzy zmierzoną długością Lka a długością wzorca Lkr ,
przypisanego do zmierzonej średnicy błędu PS,
błędu skanowania PF.
Zależności między nimi mogą być opisane jednym z trzech poniższych równań:
Przypadek 1:
( Lka- Lkr + PS ) > 0 E = Lka - Lkr + PS + PF
(IX.5)
Przypadek 2:
( Lka- Lkr + PS ) = 0 E = + PS lub E = - PS
(IX.6)
Przypadek 3:
( Lka - Lkr + PS ) < 0 E = Lka - Lkr + PS – PF
(IX.7)
Procedura A zalecana jest przy pomiarze wzorców kulowych, gdzie występuje błąd związany
z uśrednianiem położenia środka kuli z wielu punktów pomiarowych, tak aby wpływ
pojedynczych punktów był pomijalnie mały.
Procedura B
Jest dokładniejsza, lecz bardziej złożona i polega na pomiarze dla każdej z długości
dodatkowego (oprócz wzorca kulowego) krótkiego wzorca końcowego. Błąd pomiaru
długości wynika z:
różnicy pomiędzy zmierzoną odległością Lka , a skalibrowaną odległością pomiędzy
kulami Lkr ,
dodatkowego błędu EE określonego na podstawie pomiarów krótkiego wzorca
końcowego
E = Lka – Lkr + EkE
(IX.8)
Do wyznaczenia błędu E można zastosować bardziej rozbudowany wzorzec z
elementami kulistymi (rys. IX.56) proponowany do sprawdzania tomografów firmy C.Zeiss,
który pozwala na wyznaczenie większej liczby wymiarów.
Rys. IX.56. Wzorzec MetrotomCheck do wyznaczania błędu E pomiaru długości [N6,A101]
426
Do wyznaczania błędu E pomiaru długości stosowane są również wzorce stopniowe
lub płytowe wzorce kulowe używane do badania dokładności współrzędnościowych maszyn
pomiarowych [A51,A55]. Przy wyborze wzorca należy zwrócić uwagę na jego współczynnik
absorpcji promieniowania. Chropowatość wzorca powinna być pomijalnie mała. Dla różnych
materiałów oraz różnych współczynników absorpcji wzorca wyznaczona wartość błędu przy
pomiarze długości może być różna.
Na rys. IX.57 przedstawiono wzorzec płytowy ze sferycznymi elementami
wzorcowymi w postaci czasz wewnętrznych zaprezentowany przez badaczy z PTB
(Physikalisch-Technische Bundesanstalt) i BAM (Federal Institute for Materials Research
and Testing).
Rys. IX.57. Płytowy wzorzec ze sferycznymi elementami wzorcowymi [A101]
Wzorzec ten o wymiarach 20×20 mm wykonany z Zeroduru charakteryzuje się bardzo
małą podatnością na wpływy temperatury, bowiem jego współczynnik rozszerzalności
wynosi α=0 ±0,1 x 10 -6 K-1. Zawiera on 16 elementów wzorcowych o odchyłkach kształtu
sfery nie przekraczających 2,5 µm, rozmieszczonych z dokładnością 1,5‚2 µm.
Przedstawiony wzorzec służy do wyznaczania błędów pozycjonowania oraz błędów
kształtu otworów sferycznych. Może być on umieszczany w różnych miejscach zakresu
pomiarowego badanego tomografu w celu określenie rozkładu błędów w jego przestrzeni
pomiarowej.
Na rys. IX.58 zaprezentowano wyniki pomiaru wzorca w położeniu poziomym.
Rys. IX.58. Wyniki pomiaru wzorca płytowego ze sferycznymi elementami wzorcowymi [A101]
427
Kolorowe obszary wewnątrz sfer obrazują rozkłady błędów kształtu, a liczby obok nich
- wartości błędów pozycjonowania rozstawienia osi. Wartości te nieznacznie się różnią w
zależności od położenia wzorca. Dla wzorca w położeniu poziomym, któremu odpowiada
rys. IX.58, zawierają się w zakresie od 0,5 do 3,7 µm, natomiast dla położenia pionowego w zakresie od 1,1 do 2,3 µm.
Wartości odchyłek kształtu czasz podane są na pionowym słupku w odniesieniu dla
poszczególnych kolorów. Wartości te dochodzą nawet do ±15 µm i znacznie odbiegają od
odchyłek nominalnych. Niewątpliwie występuje tu wpływ zmiennej przenikalności materiału.
Parametry związane z błędem skanowania - PF, PS,
Rozróżnia się błąd skanowania kształtu – PF i błąd skanowania wymiaru PS. W obu
przypadkach stosuje się kule wzorcowe, których chropowatość i odchyłki kształtu w stosunku
do błędu skanowania powinny być pomijalnych rozmiarów. Mogą być także stosowane
wzorce jako artefakty zawierające w swej budowie kule, jak np. wzorce prętowe kulowe lub
płytowe wzorce kulowe [25,A48,A62,A84,A127], dominują jednak pojedyncze kule.
Przy wyznaczaniu parametrów PF(TS) oraz PS(TS) w trybie pomiaru ,,w obrazie”
średnica każdej z kul powinna być pomiędzy 0,1 do 0,2 razy przekątna obszaru pomiarowego
przy stosowanym powiększeniu. Natomiast przy wyznaczaniu parametrów PF(TT) oraz
PS(TT) w trybie pomiaru ,,na obrazie” średnica żadnej z kul nie powinna być mniejsza niż w
trybie ,,w obrazie”
Dla wzorców kulowych wymaga się świadectwa potwierdzającego ich średnicę i
kształt.
Błąd skanowania kształtu PF wyznacza się z różnicy promieni R max i Rmin
stanowiących maksymalną i minimalną odległość od punktu środka kuli będącego środkiem
okręgu średniokwadratowego wyznaczonego metodą Gausa z 25 punktów (rys.IX.59a). W
tym teście nie jest wymagana znajomość atestowanego wymiaru średnicy kuli.
Błąd skanowania wymiaru PS wyznacza się z różnicy między średnicą kuli
wyznaczoną z pomiaru Da a średnicą o znanym wymiarze wzorcowym Dr (rys.IX.59b).
a)
b)
PF=Rmx-Rmin
PS=Da-Dr
Rys. IX.59. Graficzna ilustracja błędu skanowania kształtu PF i błędu skanowania wymiaru PS [A101]
Parametry określające zależności wymiarowo-materiałowe – GS, GF, GG,
Przy pomiarach z sensorami CT wpływ materiału i geometrii mierzonego przedmiotu
jest szczególnie wyraźny, dlatego materiał wzorca powinien być możliwie podobny do
materiału najczęściej mierzonych elementów. Tylko w ten sposób możliwe jest określenie
wpływu materiałowych i geometrycznych zależności na pomiar rzeczywistego, typowego
elementu.
428
Wszystkie poniżej opisane parametry są tworzone na bazie kompensacji Gaussa
odpowiednich elementów kształtu:
a). Parametr GS jest dany dla każdego stopnia średnicy wewnętrznej i zewnętrznej.
Wartość parametru GS jest miarą odchylenia zmierzonej średnicy wewnętrznej bądź
zewnętrznej Da od przyjętej wzorcowej średnicy Dr.
GS równe jest więc: GS = Da - Dr
b). Parametr GG określa prostoliniowość osi otworu wewnętrznego. Rzeczywista
odchyłka prostoliniowości otworu wewnętrznego jak i kształtu przekroju wzorca
muszą być brane pod uwagę przy określaniu niepewności (patrz DIN ISO/ TS 23165).
c). Parametr GF mierzonego łuku określany jest jako rozstęp promieniowej odchyłki od
dopasowanego kształtu.
Jako wzorzec może być tu zastosowany stopniowy walec w postaci cylindra (walec z
otworem w środku) z minimum pięcioma i maksymalnie dziesięcioma znacząco różniącymi
się średnicami zewnętrznymi z współosiowym przelotowym otworem. Na rys. IX.60
przedstawiono taki wzorzec z pięcioma średnicami i otworem w środku o jednakowym
wymiarze.
Rys.IX.60. Cylindryczny wzorzec stopniowy do wyznaczania parametrów GS, GG i GF [N6,A101]
Sformułowane są pewne wymagania dotyczące wzorca, a mianowicie, by stosunek
promieni zewnętrznych do promieni wewnętrznych wynosił co najmniej 5. Wysokość stopni
powinna być jednakowa, a stosunek między wysokością wzorca i jego największą średnicą
powinien się zawierać pomiędzy 0,8 a 1,2. Stopniowanie średnic musi być liniowe.
Wartość niepewności kalibracji wzorca, odnośnie wymiarów i kształtu, musi być
dokumentowana. Odchyłka kształtu powinna być znacznie mniejsza niż podawany przez
producenta błąd pomiaru długości. Niepewność pomiaru dla procedury sprawdzania określa
norma DIN ISO/TS 23165.
Parametry określający rozdzielczość. Rozróżnia się następujące dwa rodzaje rozdzielczości:
a). Rozdzielczość struktury,
b). Rozdzielczość przestrzenna.
Rozdzielczość struktury dla pomiarów przestrzennych Dg jest zdefiniowana jako
średnica (graniczna średnica) najmniejszej kuli, za pomocą której można wyznaczyć daną
przez producenta wartość graniczną MPE błędu skanowania kształtu PF i błędu skanowania
wymiaru PS. Rozdzielczość struktury opisuje wielkość najmniejszej struktury, która jest
mierzalna z określoną tolerancją (zgodnie z akapitem 4 VDI/VDE 2617). Najmniejsza
mierzalna kula (określona przez producenta maszyny), stanowi strukturę normalną. Za jej
pomocą sprawdzana jest rozdzielczość struktury.
429
Deklaracja o rozdzielczości struktury dla pomiarów współrzędnościowych jest ściśle
związana z pozostałymi parametrami dokładnościowymi i ma na nie duży wpływ.
Rozdzielczość jest w zasadzie niezależna od detektorów maszyny współrzędnościowej.
Dlatego też wymaga się od producenta tomografu, aby ten określił wartość parametru
rozdzielczości. Procedury pozwalające określić rozdzielczość struktury nie są obecnie
określone w normach. Jednak w wytycznych VDI/VDE 2617 Arkusz 6.1 i Arkusz 6.2 dla
optycznych maszyn współrzędnościowych opisane są procedury określania rozdzielczości, w
związku z czym mogą być one dostosowane na potrzeby tomografów CT. Przykładowa
procedura oparta o wymienione wytyczne znajduje się w VDI/VDE 2617 Arkusz 1.3.
Przy pomiarach przestrzennych, z danymi pochodzącymi z pomiarów za pomocą
tomografu CT dla danej wartości progowej procesu, rozdzielczość struktury w skali szarości
Voxeli nie obejmuje całego łańcucha pomiarowego dla pomiarów przestrzennych. Aby
uzyskać odpowiednie informacje dotyczące geometrii, należy w zasadzie wyróżnić z
rozdzielczości skali szarości Voxeli, rozdzielczość struktury dla pomiarów przestrzennych.
Rozdzielczość struktury w skali szarości Voxeli jest opisana (ISO 15708) przez funkcję
transferu modulacji (MTF). Parametr MTF przy 10% modulacji w jednostkach par linii na
mm (lp/mm) ustala graniczną widoczność struktury dla danych pomiarowych CT. Wysoka
rozdzielczość struktury w skali szarości Voxeli może korzystnie wpływać na pomiary
przestrzenne CT, lecz nie jest wystarczającym warunkiem dla dobrych właściwości
metrologicznych pomiaru.
Na rozdzielczość struktury mają wpływ następujące czynniki:
wielkość i kształt ogniska (plamki ogniska) lampy rentgenowskiej w zależności od:
- napięcia
- prądu
prefiltracja promieni rentgenowskich,
powiększenie,
wielkość piksela detektora,
liczba przekrojów (projekcji) przy pobieraniu danych,
operacje filtrowania, uśredniania, funkcje obliczeniowe,
sartości progowe przy znajdowaniu powierzchni.
Rozdzielczość przestrzenna opisuje najmniejszą mierzalną zmianę (przemieszczenie) w
danym kierunku pomiarowym (x, y i z). Rozdzielczość przestrzenna jest zawarta w pomiarze
długości i skanowania.
Wielkości wpływające na rozdzielczość przestrzenną to:
powiększenie,
kwantyzacja przetwornika A/C,
szum systemu,
algorytmy softwaru jak ,,Subvoxeling”.
Wytyczne VDI/VDE 2630 [N27], stanowiące podstawę niniejszego fragmentu rozdziału IX,
wyjaśniają jedynie zagadnienia związane z rozdzielczością struktury. Zagadnienia związane z
rozdzielczością przestrzenną są ujęte nader skromnie.
Według projektu normy ISO [N6]
Projekt normy definiuje specyfikacje i metody testowania współrzędnościowych
systemów pomiarowych (CMS) stosujących zasadę tomografii komputerowej w celu
porównywalności cech współrzędnościowych systemów pomiarowych z sensorami
stykowymi i optycznymi. W ścisłej zależności od ISO 10360-2 [N14] i ISO 10360-5 [N17]
jak również ISO 10360-8 [N3] projektowana norma definiuje metody badań odbiorczych
430
mających na celu monitorowanie błędów pomiaru długości i błędów próbkowania. Jednak nie
odnosi się do badań materiałowych i celów medycznych.
Stosowane symbole i oznaczenia składają się z dużej litery opisującej albo
charakterystykę błędu próbkowania P, albo charakterystykę błędu pomiaru długości E.
Dalsze parametry opisujące wielkości mierzone występują w trzech grupach indeksów i są
oddzielone dwukropkami. Natomiast w każdej grupie wpisy są oddzielone pojedynczymi
kropkami. Na przykład PForm.Sph.1x25:Tr:CT lub EBi:Tr:CT. Dodany indeks MPE (po przecinku)
oznacza specyfikacje największego (maksymalnego) dopuszczalnego błędu, jak to ilustruje
następujący przykład: PForm.Sph.1x25:Tr:CT,MPE lub EBi:Tr:CT,MPE .
Proponowane są dwa tryby pomiaru: tryb stacjonarny tzw. pomiaru ‘w obrazie’ (St) i
tryb postępowy pomiaru ‘na obrazie’ (Tr). Tryb ‘na obrazie’ występuje, gdy generowanie
analizowanej objętości pomiaru CT nie wymaga rejestracji i łączenia (często nazywanego
szyciem) kilku cząstkowych obrazów radiograficznych na projekcję obrazów.
Ocena dokładności systemu komputerowego obejmuje wyznaczanie błędów
próbkowania i błędów pomiaru długości.
Błędy próbkowania obejmują następujące ich rodzaje:
1.Błąd próbkowania kształtu PForm.Sph.1x25::CT, w ramach którego zakres odległości
promieniowej Gaussa może być określony przez dopasowanie najmniejszej sumy kwadratów
25 punktów reprezentatywnych z kuli testowej. Punkty powinny być w przybliżeniu
równomiernie rozłożone na powierzchni kuli, najlepiej wg wytycznych zwartych w ISO
10360-5 [N17]. Wyznaczona wartość błędu powinna zawierać się w maksymalnym błędzie
dopuszczalnym kształtu PForm.Sph.1x25::CT,MPE dozwolonym przez specyfikacje.
2.Wartość rozproszenia próbkowania PForm.Sph.D95%::CT najmniejsza szerokość kulistej
powłoki, która zawiera 95% wszystkich punktów pomiarowych.
3.Błąd próbkowania wymiaru PSize.Sph.1x25::CT błąd wskazania (błąd średnicy) różnica
pomiędzy średnicą dopasowania najmniejszej sumy kwadratów do 25 punktów
reprezentatywnych z kuli testowej a kalibrowaną wartością tej średnicy.
Te same 25 punktów reprezentatywnych, które zostały użyte do testu błędu próbkowania
kształtu PForm.Sph.1x25::CT stosuje się do oceny błędu próbkowania wymiaru. Po obliczeniu kuli
Gaussa używając 25 punktów reprezentatywnych wyznacza się średnicę tej kuli. Błąd
próbkowania wymiaru określany jest z różnicy pomiędzy wyznaczoną średnicą kuli Gaussa a
kalibrowaną średnicą kuli testowej.
4.Błąd próbkowania wymiaru All PSize.Sph.All::CT błąd wskazania (błąd średnicy) różnica
pomiędzy średnicą dopasowania najmniejszej sumy kwadratów do wszystkich punktów
pomiarowych z kuli testowej a kalibrowaną wartością tej średnicy.
Ten sam pomiar i wszystkie punkty pomiarowe, które zostały użyte jako surowe dane
wejściowe do testu błędu próbkowania (PForm.Sph.1x25::CT i PForm.Sph.D95) stosuje się do oceny
wartości błędu próbkowania wymiaru All. Błędem próbkowania wymiaru All wyznacza się z
różnicy pomiędzy wyznaczoną średnicą kuli Gaussa a kalibrowaną średnicą kuli testowej.
5. Błąd pomiaru długości EBi::CT błąd wskazania (błąd pomiaru długości) podczas
dwukierunkowego pomiaru kalibrowanej długość testowej.
EBi:Tr:CT dwukierunkowy błąd pomiaru długości, gdy używane są osie współrzędnościowe
współrzędnościowych systemów pomiarowych w trybie pomiaru ‘na obrazie’.
EBi:St:CT dwukierunkowy błąd pomiaru długości ze stacjonarnymi osiami
współrzędnościowymi współrzędnościowych systemów pomiarowych w trybie pomiar ‘w
obrazie’.
EUni::CT błąd wskazania (błąd pomiaru długości) podczas jednokierunkowego pomiaru
kalibrowanej długość testowej.
431
EUni:Tr:CT jednokierunkowy błąd pomiaru długości, gdy używane są osie
współrzędnościowe współrzędnościowych systemów pomiarowych w trybie pomiar ‘na
obrazie’.
EUni:St:CT jednokierunkowy błąd pomiaru długości ze stacjonarnymi osiami
współrzędnościowymi współrzędnościowych systemów pomiarowych w trybie pomiar ‘w
obrazie’.
Oznaczenie największej (maksymalnej) dopuszczalnej wartości błędu dozwolonego
przez specyfikacje zawiera symbol MPE, jak np. EBi::CT,MPE i oznacza wartość ekstremalną
(maksymalną) EBi::CT dozwoloną przez specyfikacje jako największy dopuszczalny błąd
pomiaru długości.
Oprócz wymienionych rodzajów błędów rozróżnia się jeszcze błędy wymiaru zależne
od materiału i geometrii, i tak:
GS błąd wskazania zależny od materiału i geometrii (błąd średnicy) różnica pomiędzy
średnicą dopasowania najmniejszej sumy kwadratów do wszystkich punktów pomiarowych z
okrągłego wycięcia cylindra testowego a kalibrowaną wartością tej średnicy.
GS(Tr) błąd średnicy zależny od materiału i geometrii z okrągłego wycięcia cylindra
testowego (jako część cylindra stopniowego), gdy używane są osie współrzędnościowe
współrzędnościowych systemów pomiarowych w trybie postępowym pomiar ‘na obrazie’.
GS(St) błąd średnicy zależny od materiału i geometrii z okrągłego wycięcia cylindra
testowego (jako część cylindra stopniowego) ze stacjonarnymi osiami współrzędnościowymi
współrzędnościowych systemów pomiarowych w trybie stacjonarnego pomiaru CT: pomiar
‘w obrazie’.
Jak również rozróżnia się błędy kształtu zależne od materiału i geometrii.
GF błąd wskazania zależny od materiału i geometrii (błąd kształtu), w którym zakres
odległości promieniowej Gaussa może być określony przez dopasowanie najmniejszej sumy
kwadratów do wszystkich punktów z okrągłego wycięcia cylindra testowego (jako część
cylindra stopniowego).
GF(Tr) błąd kształtu zależny od materiału i geometrii z okrągłego wycięcia cylindra
testowego (jako część cylindra stopniowego), gdy używane są osie współrzędnościowe
współrzędnościowych systemów pomiarowych w trybie postępowym pomiar ‘na obrazie’.
GF(St) błąd kształtu zależny od materiału i geometrii z okrągłego wycięcia cylindra
testowego (jako część cylindra stopniowego) ze stacjonarnymi osiami współrzędnościowymi
współrzędnościowych systemów pomiarowych w trybie stacjonarnego pomiaru CT: pomiar
‘w obrazie’.
Błędy prostoliniowości zależne od materiału i geometrii
GG błąd wskazania zależny od materiału i geometrii (błąd prostoliniowości) osi
wewnętrznego cylindra cylindra stopniowego.
GG(Tr) błąd prostoliniowości osi wewnętrznego cylindra cylindra stopniowego zależny
od materiału i geometrii, gdy używane są osie współrzędnościowe współrzędnościowych
systemów pomiarowych w trybie postępowym pomiar ‘na obrazie’.
GG(St) – błąd prostoliniowości osi wewnętrznego cylindra cylindra stopniowego
zależny od materiału i geometrii ze stacjonarnymi osiami współrzędnościowymi
współrzędnościowych systemów pomiarowych w trybie stacjonarnego pomiaru CT: pomiar
‘w obrazie’.
Uwagi dotyczące błędów pomiaru długości
Błąd pomiaru długości opisuje trójwymiarowe zachowanie błędu całego systemu,
złożonego ze współrzędnościowego systemu pomiarowego i sensora w całej objętości
pomiarowej. To zachowanie błędu wynika z nakładania się wielu oddzielnych błędów, np.
nieskorygowane błędy systematyczne i nieskorygowane histerezy związane z ruchem osi
współrzędnych, jak również błędy losowe. We współrzędnościowych systemach
432
pomiarowych, stosujących zasadę tomografii komputerowej (CT), wartość błędu pomiaru
długości może być w znacznym stopniu zależna od błędów sensora.
Różne błędy pomiaru długości mogą wystąpić przy różnych rozmiarach pola pomiarowego.
W związku z tym testy należy przeprowadzić w różnych ustawieniach wielkości pola
pomiarowego (ponieważ to zachowanie jest inne niż w przypadku współrzędnościowych
systemów stykowych). Błędy pomiaru długości mogą również zależeć od innych ustawień
parametrów, takich jak ustawienia mocy.
Jeżeli pomiary obejmują użycie dodatkowego wyposażenia, takiego jak
obrotowe/skrętne przeguby lub inny sprzęt do regulacji pochylenia / nachylenia, błędy
pomiarowe wynikające z nich powinny być uwzględniane przy obliczaniu błędu pomiaru
długości. W przeciwnym razie tych urządzeń należy unikać.
Wzorce referencyjne
Określenie błędu dwukierunkowego pomiaru długości polega na zastosowaniu wzorców
referencyjnych z materialnymi miarami długości, takich jak wzorce kulkowe z dwiema lub
większą liczbą kul, równolegle płytki wzorcowe, stopniowe płytki wzorcowe jako wzorce
stopniowe (określane poniżej jako płytki wzorcowe), płyty kulowe, płyty z otworami lub
płyty ze sferycznymi nasadkami (kapslami) lub kostki. W ten sposób, wszystkie długości
testowe potrzebne do ISO-zgodnego pomiaru błędu pomiaru długości mogą być realizowane
przy użyciu jednego wzorca referencyjnego.
Chropowatość i odchyłki kształtu mierzonej powierzchni wzorca referencyjnego
powinny być – jako referencyjne warunki pracy dla tego testu – mniejsze niż 20%
którejkolwiek podanej wartości P::CT,MPE (tj. PForm.Sph.1x25::CT,MPE, PForm.Sph.D95%::CT,MPE,
PSize.Sph.1x25::CT,MPE i PSize.Sph.All::CT,MPE). Ponieważ różne materiały mają różne właściwości
radiologiczne, co może prowadzić do różnych błędów pomiaru długości, muszą być one
podane. W przypadku gdy producent nie określił materiału lub powierzchni wzorca
referencyjnego, użytkownik może wybrać go swobodnie.
Dopuszczalne jest używanie tego samego wzorca referencyjnego do pomiaru błędów
próbkowania i do pomiaru błędów pomiaru długości tak długo, jak wymagania pojedynczych
części testu są spełnione – wliczając kalibrację wszystkich wymaganych geometrii w
odniesieniu do długości, wymiaru i kształtu. Aneks B opisywanego projektu normy
przedstawia wielokulowy wzorzec referencyjny, który może być stosowany do badania
błędów próbkowania i badania błędu pomiaru długości (typ wzorca podobny jak
przedstawiony na rys.IX.56).
Procedura w wyznaczaniu błędów pomiaru długości
Zaleca się wykonanie testu poprzez zmierzenie długości w siedmiu różnych kierunkach
przestrzennych dla każdego stopnia wielkości badanego pola pomiarowego. Te kierunki
przestrzenne powinny obejmować kierunki pionowe, poziome i ukośne.
Możliwy wybór dla kierunku testu, tj. linie pomiarowe, jest podany w tabeli IX.4. Rys.
IX.61 przedstawia graficzny widok orientacji linii pomiarowych w objętości pomiarowej.
Jeżeli nie jest to technicznie możliwe, podobne pozycje powinny być wybrane. Cztery z
siedmiu pozycji muszą być wybrane zgodnie z informacją podaną w tabl.IX.3 (oznaczone
jako wymagane). Pozostałe pozycje mogą być dowolnie wybrane przez testera. Pozycja 1
jest pozycją domyślną. Pozycja ta powinna być wybrana ilekroć jest to technicznie możliwe.
Pięć długości testowych powinno być zmierzonych trzykrotnie (powtórz i=1, 2, 3)
każda we wszystkich pozycjach i kierunkach. Najmniejsza długość testowa nie powinna być
mniejsza niż 30 mm, największa powinna pokrywać – jako referencyjne warunki pracy dla
tego testu – przynajmniej 66% przekątnej przestrzennej objętości pomiarowej w odpowiedniej
badanej wielkości pola pomiarowego. Pozostałe długości testowe powinny być tak dobrane,
aby pokryły one długość w przybliżeniu jednolicie. Schemat testowy opisany w ten sposób
zawiera zazwyczaj 210 pomiarów długości (7 kierunków, 5 długości w każdym kierunku, 3-
433
krotne powtórzenie każdego pomiaru, wszystkie pomiary wykonane w dwóch wielkościach
pola pomiarowego).
Tablica IX 4. Orientacje położenia wzorca w objętości pomiarowej
Numer
pozycji
1
2
3
4
5
6
7
Orientacja w objętości (przestrzeni)
pomiarowej
Wzdłuż przekątnej w przestrzeni od
punktu (R, 0°, 0) do (R, 180°, H)
Alternatywnie, kąt 45° względem osi
obrotu może być wybrany – jeśli jest to
technicznie możliwe
Wzdłuż przekątnej w przestrzeni od
punktu (R, 0°, 0) do (0, 0°, H)
Wzdłuż przekątnej w przestrzeni od
punktu (R, 0°, H/2) do (R, 180°, H)
Wzdłuż pionowej osi z punktu (0, 0°, 0)
do (0, 0°, H)
Wzdłuż pionowej osi z punktu (R, 0°, 0)
do (R, 0°,H)
Wzdłuż kierunku promieniowego od
punktu (R, 0°, H/2) do (R, 180°, H/2)
Wzdłuż kierunku promieniowego od
punktu (R, 0°, H) do (R, 180°, H)
Wymagane lub
domyślne
Domyślna
pozycja
wymagana
Standardowe
Standardowe
Wymagane
Wymagane
Standardowe
Wymagane
UWAGA Do specyfikacji w tej tabeli, przyjmuje się przeciwległe sobie narożniki objętości
pomiarowej (R, 0°, 0) i (R, 180°, H) we współrzędnych cylindrycznych (r, φ, z) cylindrycznej
objętości pomiarowej o promieniu r = R i całkowitej wysokości z = H.
Tabela nie bierze pod uwagę ograniczonej możliwości pomiaru w granicach przestrzeni
pomiarowej.
Tabela przedstawia ogólny schemat orientacji w przestrzeni pomiarowej. Dokładne kąty tj.
dla ustawień ukośnych mogą się zmieniać w zależności od wymogów technicznych.
Podane wskazówki są z założenia poświęcone osiowym CT z osią obrotu równoległą do osi z
podanego cylindrycznego układu współrzędnych.
434
Rys. IX.61. Pozycje wzorców materialnych w wyznaczaniu błędów pomiaru długości: 1,2,3-pozycje
ukośne, 4,5-pozycje pionowe, 6,7- pozycje poziome (promieniowe) [N6]
Określona przez producenta maksymalna długość penetracji przy pomiarze błędu
pomiaru długości przy użyciu wzorców referencyjnych wykonanych z danego materiału Lmax,E
(materialny) nie może być przekroczona w żadnym pomiarze dla oceny błędów pomiaru
długości. Oświadczenie to musi być respektowane do wszystkich projekcji rentgenowskich
podlegających ocenie do obliczenia błędów pomiaru długości.
Błąd dwukierunkowego pomiaru długości jest określony osobno dla różnych trybów
pomiaru:
1) błąd pomiaru długości w stacjonarnym trybie pomiaru ‘w obrazie’ jest określony jako
EBi:St:CT. Ten pomiar będzie zawsze stosowany gdy współrzędnościowy system pomiarowy
umożliwia ten tryb pracy.
2) błąd pomiaru długości w postępowym trybie pomiaru ‘na obrazie’ jest określony jako
EBi:Tr:CT. Ten pomiar będzie zawsze stosowany gdy współrzędnościowy system pomiarowy
umożliwia ten tryb pracy.
Użyty wzorzec referencyjny powinien mieć – jako referencyjne warunki pracy do tego
testu – współczynniki rozszerzalności większe niż 2×10-6 K-1. Jeśli to nie jest spełnione,
odpowiednie obliczenia zastępcze są przeprowadzane dla współczynnika rozszerzalności 8 do
13×10-6 K-1 lub dodatkowa długość testowa jest mierzona na wzorcu, który ma współczynnik
rozszerzalności 8 do 13×10-6 K-1. Długość testowa powinna stanowić ok. 50% największej
długości w objętości pomiarowej.
W przypadku gdy do obliczania charakterystyk są stosowane płytki wzorcowe,
dwukierunkowa długość testowa jest obliczana z odległości między dwoma punktami
pomiarowymi z przeciwnych powierzchni płytki wzorcowej. Różnica pomiędzy długością
testową La (ocenioną, tj. zmierzoną wartością) i kalibrowanym średnim wymiarem Lr
(wartością referencyjną) płytki wzorcowej (ISO 3650), jest błędem pomiaru długości EBi::CT.
EBi::CT = La – Lr .
W przypadku gdy do obliczenia błędu pomiaru długości jako wzorce referencyjne
używane są wzorce kulowe, płyty kulowe lub płyty z otworami, środki (pozycje) dwóch
mierzonych kul lub cylindrów powinny być obliczone dla każdej długości testowej z punktów
próbkowania przez indywidualne dopasowanie odpowiednich kul lub cylindrów. Odległość
435
pomiędzy dwoma środkami kul lub cylindrów to oceniona wartość Lsa długości testowej.
Różnica pomiędzy ocenioną wartością Lsa i referencyjną wartością Lsr to błąd odległości kuli
SD.
Ocena
Ocena jest niezależna od tego czy użyte są płytki wzorcowe, wzorce kulowe, płyty
kulowe czy płyty z otworami i jest taka sama dla wszystkich linii pomiarowych.
Wartość niepewności rozszerzonej testu (ISO 23165) U zastosowanej metody jest
brana pod uwagę przy porównywaniu błędu pomiaru długości z największym dopuszczalnym
błędem EBi::CT,MPE (patrz ISO 14253-1).
|EBi::CT| ≤ | EBi::CT,MPE| - U do przeprowadzenia testu przez producenta w celu wykazania
zgodności z największym dopuszczalnym błędem EBi::CT,MPE.
|EBi::CT| > | EBi::CT,MPE| + U do przeprowadzenia testu przez nabywcę w celu wykazania
niezgodności z największym dopuszczalnym błędem EBi::CT,MPE.
Nie więcej niż pięć z 35 długości testowych może mieć maksymalnie jedną wartość EBi::CT z
trzech pomiarów, która jest większa niż największy dopuszczalny błąd EBi::CT,MPE, biorąc pod
uwagę wartość niepewności rozszerzonej testu.
Dla każdej wartości większej niż limit, pomiar odpowiedniej długości testowej
powinien być powtarzany trzykrotnie w położeniu, w którym największy dopuszczalny błąd
został przekroczony. Jeśli wszystkie wartości błędu pomiaru długości EBi::CT uzyskane przez
te powtórne pomiary leżą w zakresie największego dopuszczalnego błędu EBi::CT,MPE, biorąc
pod uwagę wartość niepewności testu, największy dopuszczalny błąd jest przestrzegany.
Jest to przydatne, w celu pokazania błędów pomiaru długości z ich największymi
dopuszczalnymi wartościami i niepewnością metody badawczej na diagramie. Istnieją dwie
opcje diagramu: albo żeby zmniejszyć największe dopuszczalne błędy EBi::CT,MPE przez
wartość niepewności rozszerzonej testu U, albo żeby dodać wartość niepewności testu do
każdej mierzonej wartości jako słupek błędu na diagramie.
Skutki zależne od materiału i geometrii
Wady materiału i geometrii przedmiotu mierzonego są szczególnie widoczne w
pomiarach tomograficznych, w odróżnieniu od klasycznych współrzędnościowych systemów
pomiarowych. Staje się to widoczne np. przez promieniowanie rozproszone i artefakty
związane ze wzmocnieniem wiązki w rekonstruowanej objętości. Metody opisane wcześniej,
w odniesieniu do wyznaczania błędów pomiaru długości i błędów próbkowania, obejmują te
skutki jedynie w ograniczonym stopniu, zwłaszcza tam, gdzie nie ma płytek wzorcowych
stosowanych do wyznaczania błędów pomiaru długości. Zaleca się, aby odpowiednie testy
były przeprowadzone przez użytkownika dla typowych materiałów i geometrii przedmiotu
mierzonego używanego w danym systemie. Mogą to być np. ustalenie niepewności pomiaru
analogicznie do ISO 15530-3 lub innych wytycznych dotyczących ustalania niepewności
pomiaru przy pomiarze przedmiotu na współrzędnościowych systemach pomiarowych z
tomografią komputerową.
Najbardziej niezawodna metoda określenia skutków zależnych od materiału i geometrii,
składa się z pomiaru kalibrowanych przedmiotów na współrzędnościowym systemie
pomiarowym i porównania wyników z wartościami referencyjnymi ocenionymi na podstawie
atestowanych metod (np kalibracji za pomocą stykowych CMS z dołączoną niepewnością
rozszerzoną kalibracji). To może być jeden z elementów badania przydatności procesu
pomiarowego. Alternatywnie mogą być badane, typowe wywzorcowane części. Dodatkowo,
największe dopuszczalne błędy mogą być uzgodnione pomiędzy użytkownikiem a
producentem.
Jedna z możliwości przybliżonego określenia skutków zależnych od materiału i
geometrii składa się z pomiaru odpowiednich wzorców referencyjnych za pomocą
współrzędnościowego systemu pomiarowego i porównania wyników z wartościami
436
referencyjnymi ocenionymi na podstawie atestowanych metod (np kalibracji za pomocą
stykowych CMS z dołączoną niepewnością rozszerzoną kalibracji). Niezbędne jest
zapewnienie, aby materiał i wymiary wzorca referencyjnego były podobne do tych
elementów, które będą mierzone.
Użytymi wzorcami referencyjnymi mogą być cylindryczne wzorce stopniowe
(rys.IX.60) z co najmniej pięcioma, a co najwyżej dziesięcioma różnymi średnicami
zewnętrznymi i współosiowym otworem cylindrycznym pełnej długości. Wskazane jest, aby
wybrać taki sam materiał wzorca referencyjnego jak przedmiotów, które mają być mierzone,
w przeciwnym wypadku niemożliwe jest przybliżone określenie wpływu materiału i
geometrii na pomiar. Stosunek największej średnicy zewnętrznej do średnicy wewnętrznej
musi wynosić co najmniej 5. Wysokości wszystkich stopni muszą być równe, a stosunek
wysokości całego wzorca stopniowego do największej średnicy zewnętrznej powinien
zawierać się w zakresie od 0,8 do 1,2. Przyrost średnic jest liniowy.
Definicje i Parametry. Parametry GS i GF i ustawienia systemu referencyjnego dla
charakterystyki GG opisane w dalszej części tekstu są utworzone na podstawie dopasowania
najmniejszych kwadratów (Gaussa) odpowiadającego elementu kształtowego o
niezablokowanym promieniu i pozycji dopasowanego elementu.
Parametr GS informuje o błędzie mierzonej średnicy wewnętrznej lub zewnętrznej Da
ocenionej, kalibrowanej wartości średnicy Dr. GS jest obliczone jako
GS = Da – Dr .
Parametr GF zmierzonych segmentów kołowych jest obliczany jako zakres błędów
promieniowych punktów danych w stosunku do dopasowanego okręgu. Wielkości mierzone
GS i GF podaje się dla wewnętrznej i zewnętrznej średnicy każdego stopnia.
Parametr GG opisuje odchyłki prostoliniowości osi wewnętrznego otworu obliczonego
ze środków wszystkich przekrojów kołowych, który zawiera środki wszystkich przekrojów
kołowych. Ponieważ wielkość bezwzględna, a zatem grubość materiału do prześwietlenia
wpływają na wartość pomiaru, należy podać promienie dla wszystkich pomiarów.
Odchyłka prostoliniowości otworu i odchyłka kształtu kulistych segmentów wzorca
referencyjnego powinny być wzięte pod uwagę przy obliczaniu wartości niepewności
rozszerzonej testu (patrz ISO 23165).
Procedura testowa. Wzorzec referencyjny jest umieszczony w objętości pomiarowej
przy wyraźnie różnych kątach nachylenia względem osi obrotu współrzędnościowego
systemu pomiarowego. Pomiar stopni wzorca referencyjnego jest wykonywany za każdym
razem w ramach pojedynczego pomiaru CT. Wszystkie pomiary CT wzorca referencyjnego
przy różnych kątach nachylenia względem osi obrotowej CMS stosującego zasadę tomografii
komputerowej, są wykonywane w tej samej wielkości pola pomiarowego.
Dwa sposoby mogą być zastosowane do analizowania właściwości elementów
geometrycznych i obszarów powierzchniowych:
1. Metoda globalnego układu współrzędnych przedmiotu mierzonego
Jeden przekrój prostopadły do osi wewnętrznej wzorca cylindrycznego, w środku
odpowiedniego stopnia wzorca referencyjnego, jest analizowany. Musi to być poprzedzone
obliczeniowym określeniem wewnętrznej osi otworu wzorca, w oparciu o dane TK (metoda
najmniejszych kwadratów lub Gaussa dopasowania linii prostej do punktów reprezentujących
środki segmentów kulistych odpowiednich płaszczyzn). Korzystając z tej metody, błędy
prostopadłości wzorca referencyjnego (wewnętrznej osi walca do bocznej powierzchni
cylindra zewnętrznego i wewnętrznego) są zawarte w całości w wielkości mierzonej.
2. Metoda lokalnego układu współrzędnych przedmiotu mierzonego
Dla każdego stopnia, oś odpowiadającego mu walca wewnętrznego lub zewnętrznego
ustala się lokalnie za pomocą wzorca dopasowanego do zmierzonych danych według metody
Gaussa. Przekrój, który ma być dopasowany do danych pomiarowych, jest prostopadły do
437
obliczonej osi cylindra w połowie wysokości odpowiedniego stopnia. Korzystając z tej
metody, błędy prostopadłości wzorca referencyjnego (wewnętrzna oś cylindra do bocznej
powierzchni cylindrów wewnętrznego i zewnętrznego) nie są uwzględnione w wielkościach
mierzonych.
Przy użyciu obu metod, segment przechodzący przez dane pomiarowe powinien
znajdować się w środku wysokości stopnia. W każdym przypadku segment powinien być w
miejscach, w których wzorzec został wykalibrowany. Wszelkie odstępstwa od powyższego,
należy wziąć pod uwagę w wartości niepewności testu.
Określenie zewnętrznego i wewnętrznego promienia kołowych segmentów odbywa się
zawsze poprzez obliczenie dopasowanego okręgu Gaussa. Kształt zmierzonych segmentów
kołowych jest obliczany jako rozstęp błędów promieniowych względem elementu
kompensacyjnego. Gęstość punktów pomiarowych stosowanych do określenia segmentów
kołowych powinna być równa gęstości punktów używanych podczas normalnej pracy
współrzędnościowego systemu pomiarowego. Zastosowanie metod filtrowania i korekty
obrazu, które różnią się od normalnej pracy współrzędnościowego systemu pomiarowego,
powinno być określone.
Testowanie błędów wymiaru i odchyłek kształtu zależnych od materiału i geometrii
odbywa się dla dwóch dowolnie wybranych pozycjach kątowych wzorców referencyjnych w
stosunku do osi obrotu współrzędnościowego systemu pomiarowego. Różnica między dwoma
kątami powinna wynosić co najmniej 30° między dwoma pomiarami.
Analiza wyników
Największe dopuszczalne błędy GS,MPE, GF,MPE i GG,MPE są określone przez producenta.
Specyfikacja dotycząca błędów wymiaru i kształtu zależnych od materiału i geometrii
jest spełniona, jeśli obliczone wartości GS, GF and GG, biorąc pod uwagę odpowiednią
wartość niepewności testowej U, są mniejsze niż określone największe dopuszczalne błędy
GS,MPE, GF,MPE and GG,MPE (patrz ISO 14253-1). Wartość testowej niepewności rozszerzonej U
jak podano w ISO 23165 jest brana pod uwagę.
Różnica między wykonaniem testu przez producenta i przez nabywcę (zasada decyzji
dla wykazania zgodności oraz do wykazania niezgodności (zgodnie z ISO 14253-1) jest
następująca:
|GY| ≤ GY,MPE – U do przeprowadzenia testu przez producenta w celu wykazania
zgodności z największymi dopuszczalnymi błędami GY,MPE and GY=GS, GG lub GF
|GY| > GY,MPE + U do przeprowadzenia testu przez nabywcę w celu wykazania
niezgodności z największymi dopuszczalnymi błędami GY,MPE and GY=GS, GG or GF.
Jeśli odpowiednie największe dopuszczalne błędy GY,MPE ± U są przekroczone
jedynie jednokrotnie, wówczas pomiar powinien być powtórzony raz (po wyczyszczeniu
wzorca). Jeśli zmierzone wartości osiągają lub są mniejsze niż największe dopuszczalne błędy
GY,MPE ± U w powtarzanym pomiarze, biorąc pod uwagę niepewność U, badanie odbiorcze
zakończone jest sukcesem (oświadczenie o zgodności, gdy badanie przeprowadzane jest przez
producenta, lub niestwierdzenie niezgodności, gdy jest ono wykonywane przez nabywcę).
Największe dopuszczalne błędy charakterystyk powinny być spełnione we wszystkich
warunkach dopuszczalnych przez producenta. Dotyczy to w szczególności wzorców
referencyjnych i parametrów filtrów.
Korzystne jest przedstawienie graficzne wyników wyznaczonych błędów wymiaru i
kształtu zależnych od geometrii. Wyniki pomiaru wzorca referencyjnego przy różnych
nachyleniach osi obrotu należy pokazać na jednym schemacie. W uzupełnieniu do zmierzonej
wartości charakterystyki, diagramy powinny pokazywać również największe dopuszczalne
błędy służące do oceny zgodności oraz odpowiednie niepewności zmierzonych wartości.
Wartości niepewności testu powinny być pokazane albo jako słupki w mierzonych
438
wartościach danej charakterystyki lub jako zmniejszenie (przypadek GY,MPE – U), lub
zwiększenie (przypadek GY,MPE + U) ograniczeń największego dopuszczalnego błędu.
Uwagi dotyczące projektowanej normy
1. Projekt normy silnie nawiązuje do metod badania dokładności współrzędnościowych
maszyn pomiarowych, tym samym nie uwzględnia wielu aspektów materiałowych np.
związanych z defektoskopią. Projekt jest rozwinięciem pewnych ustaleń zawartych w
sprawdzonych w praktyce wytycznych VDI/VDE 2630 [N27] ujętych w podrozdziale IX.56.
2. Projekt normy o objętości 63 stron zawiera część główną ujętą na stronach 1‚ 42
oraz dodatkowo części uzupełniające jako informacje o następujących tytułach:
A. Metrologiczna strukturalna rozdzielczość do pomiarów wymiarowych.
B. Opis wielokulowych wzorców referencyjnych.
C. Przykłady zastosowania metody badania błędu wymiaru zależnego od materiału i
geometrii przy użyciu cylindrycznego wzorca stopniowego.
D. Opis trybów pomiaru CT (Tr „na obrazie” i Tk „w obrazie”.
E. Specyfikacja błędów jednokierunkowego pomiaru długości.
3. Projekt normy zawiera szereg komentarzy, często odwołujący się do czytelnika, w
celu zgłoszenia ewentualnych uwag lub uzupełnień w celu udoskonalenia normy przed jej
oficjalnym ogłoszeniem.
Podsumowanie
1. Współczesne przemysłowe tomografy komputerowe CT umożliwiają wyznaczanie
wymiarów przedmiotów technicznych. Wyjątkową przydatnością odznaczają się w
wyznaczaniu wymiarów wewnętrznych, które dla innych metod są niedostępne. Dotyczy to
różnego rodzaju korpusów, np. silników samochodowych. Umożliwiają przeprowadzenie
oceny jakości montażu zespołów, zarówno mechanicznych, jak i elektryczno-elektronicznych
[A9,A13,A20].
2. Tomografy, poprzez odpowiednie oprogramowania, umożliwiają uzyskanie obrazów
przekrojowych badanych przedmiotów, a także, co jest ich istotną zaletą, zbudowanie obrazu
przestrzennego przedmiotu typu CAD dla potrzeb inżynierii odwrotnej (ang.reverse
engineering).
3. Ich cechą pozwalającą zaliczyć tomografy do kompleksowych metod badania
przedmiotów jest to, że oprócz wyznaczania wymiarów, można wykryć wady materiału, z
którego zbudowany jest przedmiot w postaci, pęknięć, nieciągłości materiału, wtrąceń innych
materiałów, wad struktury, itp.
4. Przy wyznaczaniu wymiarów, zwłaszcza gdy wprowadzi się do programu model
CAD przedmiotu, na uwagę zasługuje bogata forma graficzna ilustrująca obszary
przekraczające odchyłki wymiarowe zarówno na plus jak i na minus w różnych kolorach z
podaniem dla nich wartości tych odchyłek jak to widać na rys. IX.45 i 49.
5. Ich nie tyle wadą, co niedoskonałością jest niepełna przenikalność materiału, co
ogranicza wymiary badanych przedmiotów w zależności od rodzaju materiału. Na rys.IX.62
przedstawiono wykres pokazujący zależność grubości ścianek przedmiotu wykonanego ze
stali w funkcji wartości napięcia lampy rtg i czasu naświetlania.
439
Rys. IX.62. Wykres zależności stopnia przenikalności promieni rtg dla Fe w funkcji napięcia lampy
i czasu naświetlania (wg Yxlon International)
Dla przedmiotów wykonanych z innych niż stalowe i żeliwne przedmioty
przenikalność ta jest większa, np. dla aluminium prawie trzykrotnie.
Tomografy wyposażone w lampy o napięciu do 120 kV mogą badać przedmioty
stalowe w zasadzie o masie do 4 kg. Najczęstsze zastosowanie mają jednak te tomografy w
badaniach jakości połączeń obwodów elektrycznych na płytkach drukowanych. Do
przedmiotów o masie do 10 kg stosuje się lampy o napięciu do 225 kV, a o masie większej
nawet do 450 kV.
6. W większości przypadków tomografy wyposażone są w kabiny zabezpieczające
operatora przed promieniowaniem. Lokalne dawki promieniowania jonizującego zwykle nie
przekraczają 1µSv/h w odległości 0,1 m od obudowy tomografu. Występuje jednak część
tomografów otwartych lub częściowo otwartych dla zastosowań przemysłowych w przypadku
ciągłego przebiegu procesu kontroli przedmiotów. Wówczas takie tomografy wyposaża się w
podajniki lub roboty przemysłowe głównie do załadunku i rozładunku kontrolowanych części.
7. Coraz liczniejsze zastosowania przemysłowych tomografów obserwuje się w
zastosowaniach medycznych [26e,A9], np. dla oceny wymiarowej biołożysk, w protetyce
stomatologicznej oraz w archeologii i antropometrii.
Tomografia komputerowa CT wchodzi lawinowo do przemysłu i do ośrodków
badawczych, zwłaszcza w zakresie inżynierii materiałowej i elektroniki, np. w badaniach
struktury geometrycznej kompozytów i różnego rodzaju stopów oraz jakości połączeń
zespołów elektronicznych. Prowadzone są badania nie tylko w odniesieniu do wyrobów
przemysłowych, lecz również medycznych, np. struktur kostnych, związane m.in. z
wykopaliskami dla potrzeb archeologii i paleontologii jak również obejmujące części
metalowe i komponenty z różnych materiałów na protezy i części stawów biodrowych i
kolanowych.
Również w kraju niektóre ośrodki
badawcze podejmują tematykę których
podstawowym narzędziem badawczym jest tomograf jak np. Instytut Odlewnictwa w
Krakowie, a z uczelni; Politechnika Wrocławska (Wydział Mechaniczny) [A20], Politechnika
Warszawska (Wydział Mechatroniki) [A50-55], Uniwersytet Śląski w Katowicach (Wydział
Informatyki i Nauki o Materiałach), Politechnika Poznańska (Wydział Budowy Maszyn i
Zarządzania [A13]), Uniwersytet Rzeszowski (Wydział Matematyczno-Przyrodniczy),
Politechnika Gdańska (Wydział Mechaniczny), Akademia Górniczo-Hutnicza w Krakowie
(Wydział Fizyki i Informatyki Stosowanej), Państwowa Wyższa Szkoła Zawodowa w
Chełmie (Instytut Nauk Technicznych i Lotnictwa), Wojskowa Akademia Techniczna w
Warszawie (Wydział Nowych Technologii i Chemii) i inne.