Fale
Rozchodzące się w przestrzeni i
zależne od czasu zaburzenie
a) Fale mechaniczne (w materii)
b) Fale elektromagnetyczne (w próżni
i w materii)
c) Fale materii
Stałe uniwersalne
Dla próżni
2
C
0 8.85 10
2
N m
T
7
0 4 10
m A
12
Fala podłużna i poprzeczna
Fale mechaniczne
Fale przenoszą energię, nie przenoszą masy,
mimo przemieszczeń cząsteczek, które drgają,
przekazując energię następnym.
Rodzaje fal :
• podłużne, drgania równolegle do kierunku
rozchodzenia się fali,
• poprzeczne drgania prostopadle,
do kierunku rozchodzenia się fali,
• powierzchniowe (około 20 różnych struktur
fal).
Rozchodzące się zaburzenie może być jedno-,
dwu- i trójwymiarowe. Fale mogą być płaskie,
cylindryczne, kuliste…. Fala płaska rozchodzi się
tylko w jednym kierunku, jej czoło (powierzchnia
falowa) jest płaszczyzną.
Najprostsze rozchodzące się wzdłuż osi x w
prawo zaburzenie można zapisać w postaci:
y f x vt
gdzie v jest prędkością rozchodzenia się fazy
fali, dla fal opisanych przez funkcje
trygonometryczne
k = 2π/λ liczba falowa
2
x t
x vt ym sin 2
y ym sin
T
ym sin kx t
W zaburzeniach, które przedstawiamy jako
grupę fal energia może być przenoszona z inną
prędkością niż faza każdej z fal. W prowadza
się wówczas pojęcie prędkości grupowej.
Zasada superpozycji
Dwie lub więcej fal może przebiegać niezależnie
od siebie. Oznacza to, że przemieszczenie
dowolnej cząstki w ustalonej chwili czasu jest
sumą przemieszczeń.
Francuzki matematyk J. Fourier wykazał, że
dowolny periodyczny ruch cząstki może być
przedstawiony w postaci kombinacji liniowej
ruchów harmonicznych prostych.
yt Ao A1 sin t A2 sin 2t A3 sin 3t ...
Interferencja fal
Efekt nakładania się dwóch lub więcej ciągów
falowych
Fale stojące
Rozważamy dwie fale poruszające się w
przeciwnych kierunkach - y1(t) i y2(t) oraz falę
wypadkową y(t)
y1 ym sin kx t
y2 ym sin kx t
y y1 y2 ym sin kx t ym sin kx t
y 2 ym sin kx cos t
Otrzymany wynik oznacza, że cząstka drga w
dowolnie wybranym punkcie prostym ruchem
harmonicznym i drgania wszystkich cząstek mają
tę samą częstość.
ym
x
Drgania struny – fale poprzeczne
wychylenie
Kierunek propagacji
y
x
Drgania struny , której masa na jednostkę
długości wynosi μ, naprężonej siłą F opisane są
równaniem różniczkowym o postaci:
y y
2
2
x
F t
2
2
Równanie to wynika z drugiej zasady dynamiki
Newtona zastosowanej do poprzecznej struny.
Rozwiązaniem tego równania jest:
y ym sin kx t
gdzie jest pulsacją,
= 2, - częstotliwością,
T – okresem, k – liczbą falową
1
T
2
k
Z analizy rozwiązania równania wyznaczyć
można prędkość v rozchodzenia się zaburzenia
falowego oraz parametrów k i ω z prędkością V.
μ – gęstość liniowa struny, F - siła
V
F
F
k
Wzory te można
wyprowadzić również
analizując siły F
działające na odcinek liny
o długości l.
v
l
F
θ
F
R
Siły F rozkładamy na składowe, ΣFx = 0, ΣFy ≠ 0, dla
składowych Fy można napisać zależności:
l
l
2
2 F sin 2 F 2 F
F
R
R
Siła 2Fy wywołuje przyspieszenie cząstek liny skierowane
do środka okręgu.
L Lv 2
F
R
R
F
v
Otrzymane zostało wyrażenie na – prędkość
rozchodzenia się fali w linie naprężonej siłą F.
Przykład 1F
Na jednym końcu linki wytwarzana jest za pomocą
sznura poprzeczna fala sinusoidalna, przy czym
koniec linki drga do góry i na dół, a największe jego
przemieszczenie wynosi 0.5 cm. Ruch jest ciągle
podtrzymywany i powtarza się sinusoidalnie 120 razy
na sekundę. a) należy obliczyć prędkość, amplitudę i
długość fali tego ruchu falowego, przyjmując że
gęstość liniowa linki wynosi 0.25 kg/m, a przyłożone
naprężenie wynosi 90 N.
F = 90 N
μ = 0.25 kg/m
ym = 0.25 cm
= 120 1/s
v
F
90 N
m
19.87
kg
s
0.25
m
m
19.97
1
s 1.664 m
v T v
1
120
s
Przykład 2F
Rozchodząca się fala ma postać:
y = Ym sin (Ax + Bt)
Jaka jest prędkość tej fali?
2
x vt
y ym sin
x vt const .
dx
v 0 stala
dt
faza
dx
v
dt
Przykład 3F
Jeden koniec sprężystego pręta połączony jest ze
źródłem drgań harmonicznych:
y y0 sin t
Drugi koniec pręta jest unieruchomiony.
Wyznaczyć charakter drgań w dowolnym punkcie
pręta, przyjmując, że przy odbiciu od
nieruchomego pręta faza zmienia się na
przeciwną.
Fala poruszająca się zgodnie z kierunkiem osi x
opisana następująco:
y1 y0 sin kx t
Fala odbita (zmiana fazy przy odbiciu):
y2 y0 sin kx t y0 sin kx t
Fala wypadkowa = fala padająca + fala odbita
y y0 sin kx t y0 sin kx t
2 y0 cos t sin kx
Fala stojąca
x y
x y
sin x sin y 2 sin
cos
2
2
Amplituda
Węzły fali stojącej y = 0
sin kx 0
kx n
xn
Strzałki fali y = ymax
2
y n 1
2
Fala stojąca – superpozycja dwóch fal
propagujących się w przeciwnych kierunkach
Fale akustyczne
Są to fale rozchodzące się w gazach
(podłużne), cieczach (podłużne i
poprzeczne w przypadku cieczy o dużej
lepkości) i ciałach stałych (podłużne,
poprzeczne i powierzchniowe). Fale te
można uważać za rozchodzący się z
prędkością v impuls zagęszczeń.
x
y
Fale akustyczne w gazach i cieczach, najczęściej
podłużne, rozchodzą się wzdłuż kierunku
propagacji, na przykład x z prędkością :
v
B
0
Vp
B
V
Gdzie B jest modułem sprężystości
objętościowej ρ0 – gęstością materiału bez
dodatkowych naprężeń, V – objętością, p –
ciśnieniem, y – miara przemieszczeń cząstek,
y – równoległa do x.
Moduł sprężystości objętościowej K formalnie
określa wyrażenie:
gdzie:
p to ciśnienie,
V to objętość,
∂p/∂V oznacza
pochodną cząstkową ciśnienia względem
objętości.
Gęstość energii fali akustycznej
E0 - gęstość energii drgań źródła – gęstość energii
akustycznej, - k – współczynnik sprężystości, A –
amplituda, ω – pulsacja, ρ - gęstość
Jak dla
E 1 2
2 2
2 2
1 m
1
E0 2 kA / V 2 A 2 A oscylatora
V
V
harmonicznego
k
k m 2
m
2
Jeżeli na drodze fali ustawimy prostopadle powierzchnię S
to w czasie t na tę powierzchnię pada energia fali zawarta
w objętości V=Svt
E VE0 12 Svt 2 A2
P
dE
dt
12 Sv 2 A2
Natężenie fali I – moc na jednostkę powierzchni
I
P
S
v A
1
2
2
2
Natężenie fali jest proporcjonalne do kwadratu
amplitudy i kwadratu częstości
Przykład 3F
Drgania dźwiękowe o częstotliwości f = 500 Hz i
amplitudzie A = 0.25 mm rozchodzą się w powietrzu.
Długość fali λ = 70 cm. Napisać równanie fali, znaleźć
prędkość rozchodzenia się drgań oraz maksymalną
prędkość cząsteczek powietrza.
x t
y A sin kx t A sin 2
T
Obliczamy
prędkość fali v:
T
f
m
0.7 m 500 Hz 350
s
1
1
T
0.002 s
f 500 Hz
x t
y A sin 2
T
- znane
Cząsteczki wykonują ruch harmoniczny w kierunku
rozchodzenia się fali. Ich vp prędkość zmienia się w
sposób okresowy i możemy ją obliczyć na podstawie
równania fali.
dy 2A
x t
p
cos 2
dt
T
T
2A
p max
2A
T
m
m
p max 2 3.14 500 0.25
0.78
s
s
Fale akustyczne w ciałach
stałych
Ciecz
Ciało
stałe
Fala
podłużna
Fala
poprzeczna
Fala
podłużna
L – fala podłużna
T – fala poprzeczna
Fale akustyczne na granicy ośrodków: ‘ – odbite,
” - przechodzące
Na granicy ośrodków na przykład ciecz –
ciało stałe następuje transformacja fali
akustycznej. W ciele stałym pojawiają się dwie fale
podłużna i poprzeczna, których współczynniki
załamania są różne. Przy zmianach kąta padania
można otrzymać falę propagującą się wzdłuż
granicy ośrodków – falę powierzchniową.
Transformacji fal nie ma w przypadku
prostopadłego padania fali na granicę ośrodków.
Fale elektromagnetyczne
Równania Maxwella przewidują istnienie fal
elektromagnetycznych o prędkości rozchodzenia
się w próżni:
c
1
0 0
(1)
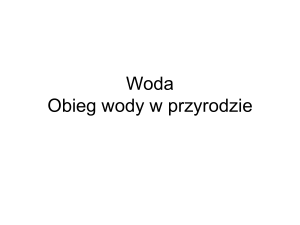
Mgławica, informacje z kosmosu otrzymane
dzięki falom elektromagnetycznym
Mgławica
emisyjna
NGC 604 w
gwiazdozbiorze
Trójkąta
(pl/wikipedia/org/
Równania Maxwella przewidują, że zmienne w
czasie pole magnetyczne indukuje wirowe pole
elektryczne i na odwrót, zmienne w czasie pole
elektryczne indukuje wirowe pole magnetyczne. Każda
zmiana w czasie pola elektrycznego wywoła powstanie
zmiennego pola magnetycznego, które z kolei wytworzy
zmienne pole pole elektryczne.
Ciąg wzajemnie sprzężonych pól
elektrycznych i magnetycznych stanowi falę
elekromagnetyczną.
Fale elektromagnetyczne możemy podzielić na
• stojące (np. wnęka rezonansowa) i
• bieżące - rozchodzące się wzdłuż linii przesyłowej lub w
wolnej przestrzeni.
Obwód LC
Przykład powstawania fal elektromagnetycznych.
Drganiom wytworzonym w elektrycznym obwodzie
LC (cewka, kondensator) towarzyszy okresowa zmiana
energii pola elektrycznego kondensatora w energię pola
magnetycznego cewki.
Jeżeli pominiemy straty na ciepło, to energia drgań
w obwodzie pozostanie stała.
Pole B
L
C
Do
generator
a drgań
Pole E
Obwód taki przekształcamy w następujący sposób: cewkę
redukujemy do prostoliniowego przewodu, okładki
kondensatora zmniejszamy, a przewody prostujemy. Pole
elektryczne i magnetyczne wypełnia teraz bardzo dużą
przestrzeń.
Przekształcanie zamkniętego obwodu
drgań w dipol elektryczny
E
B
Do
generatora
drgań
Przekształcony obwód ma
teraz większą zdolność
emitowania energii, stał się
obwodem otwartym.
Powstały obwód stanowi
dipol elektryczny o
momencie dipolowym
zależnym od czasu.
Jeżeli do prętów dipola doprowadzone zostanie napięcie
zmienne, to pręty będą się ładować okresowo ładunkiem
dodatnim i ujemnym. Zatem obwód taki staje się
oscylującym dipolem elektrycznym emitującym falę
elektromagnetyczną we wszystkich kierunkach.
Pole elektryczne dipola w czterech chwilach:
+q
+
-
-q
t=0
t = 1/8 T
+
-
t = 1/4 T
+
t = 3/8 T
z
P
x
O
Wykres biegunowy
natężenia fali
emitowanej przez dipol,
znajdujący się na osi z.
Długość odcinka OP jest
proporcjonalna do
natężenia fali
emitowanej w danym
kierunku.
Zmienne napięcie doprowadzone do z generatora powoduje
przepływ prądu wzdłuż dipola. Ładunki zbierające się na
końcach prętów dipola wytwarzają tam największe napięcia.
Drgania elektryczne rozchodzące się wzdłuż dipola dają w
wyniku falę stojącą. Fala emitowana przez dipol jest już
falą rozchodzącą się w przestrzeni (bieżącą). Fala ta jest
spolaryzowana, wektor E jest równoległy do osi dipola, B prostopadły.
Równania falowe
E - natężenie pola elektrycznego
B – natężenie pola magnetycznego
ε0 przenikalność elektryczna próżni,
μ0 - przenikalność magnetyczna próżni.
Na podstawie wprowadzonych równań Maxwell wykazał, że
wzajemnie sprzężone pola elektryczne i magnetyczne
tworzą falę poprzeczną i obliczył prędkość fali. W fali
elekromagnetycznej wektory E i B są prostopadłe do siebie i
do kierunku rozchodzenia się fali.
Dla fali rozchodzącej się wzdłuż osi x zależność
natężenia pola B i E od czasu i położenia ma postać
następującą:
B = Bmsin(kx - t)
- pulsacja, = 2
k - liczba falowa
- długość fali
T - okres drgań
- częstotliwość
(2)
E = Em sin(kx - t)
(3)
2
2
(4) kx x (4a)
k
2 (6)
1
t
(5) t
T
T
Płaska fala elektromagnetyczna poruszająca się
w dodatnim kierunku osi x
dx
y
•
•
•••
•
•
• • •
• • •
•
•
c
x
z
E z
B y
h
c x
Pola E i B są zgodne w fazach.
Prostokąt o wymiarach h i dx nie porusza się w przestrzeni. W
miarę przesuwania się fali strumień magnetyczny B będzie
się zmieniał, co spowoduje powstanie indukowanych pól
elektrycznych. To indukowane pola elektryczne, to składowe
elektryczne wytworzonej fali bieżącej. Zastosujmy prawo
Faradaya dla obwodu prostokąta o bokach h i dx (pł. xz).
dB
SEM E dl
dt
E dl ( E dE )h Eh hdE
(7)
(8)
Strumień pola magnetycznego przechodzący przez
powierzchnię prostokąta (płaszczyzna xz) wynosi:
B Bhdx (9)
B jest wartością bezwzględną pola w
prostokącie
Różniczkowanie po czasie daje
dE
dB
dx
dt
(10)
Na podstawie prawa Faradaya w postaci (8 ) otrzymujemy
B (11)
hdE hdx
dt
stąd
dE
dB
dx
dt
(12)
E
B
x
t
(13)
E(x,t) i B(x,t) są znane, więc równanie (13) można zapisać
jako
kEmcoskx t Bmcoskx t (14)
Em (15) ale
czyli
(16)
k
k
Bm
c
Oznacza to również, że związek słuszny jest dla
dowolnych wielkości pola E i B w danym momencie.
E cB
(17)
Zastosujmy teraz prawo
Ampera w postaci:
d E
B dl 0 0 dt
(18)
Całkując to równanie po obwodzie prostokąta o bokach h
i dx w płaszczyźnie xy otrzymujemy:
B dl B dB h Bh hdB
(19)
Strumień pola elektrycznego przechodzący przez ten
prostokąt wynosi:
(20)
E Ehdx
Różniczkując po czasie otrzymujemy:
d E
dE
hdx
dt
dt
(21)
a więc równanie (18 )
można przepisać w postaci
B
E
0 0
x
t
(22)
Korzystając z równań (14 ), (22 ) otrzymujemy:
kBm coskx t 0 0Em coskx t
(23)
stąd
Em
k
Bm 0 0
(24)
Eliminując Em/Bm otrzymamy:
c
1
0 0
c - prędkość światła w teorii
(1) elektromagnetyzmu. Maxwell
przewidział ten związek przed
odkryciem fal radiowych!
1
8 m
c
3.0 10
7
12 2
2
4 10 T m / A [8.9 10 C / N m ]
s
Przykład 4F
Rozważmy falę elektromagnetyczną w próżni, dla
której równania opisujące pole magnetyczne mają
postać:
Bx Bsin ky t
B y Bz 0
Jaki jest kierunek rozchodzenia się fali?
Napisz równania opisujące pole elektryczne.
EB
E cB
Bx
x
c
Ez
y
z
Bx B sin ky t
E z Bc sin ky t
E y Ex 0
Energia niesiona przez falę
elektromagnetyczną
B
h•h = A
y
c
E
x
z
dx
W pewnej chwili energia dW zawarta w pudełku o objętości
sdx przenoszona przez falę elektromagnetyczną wynosi
dW = dWE + dWB = (uE + uB)Adx (25)
Energia
pola E
uE - gęstość pola E
Energia
pola B
uB - gęstość pola B
1
1 2
2
dW 0 E
B Adx
2 0
2
ale
E cB
(26)
(17)
2
1
0 0c 1
1
E
dW 0 EcB
B Adx
EBAdx (28)
2μ0 c
20 c
2
0 0 c 2 1
Zgodnie z (1)
dx
oraz
dt
c
dw
EBAdx
1
W
Energia przepływająca
EB [ 2 ]
dt A μ cs dx μ0
m
przez jednostkową
0
(29) powierzchnię A w
c
jednostkowym czasie.
dw
S
dtA
(30)
1
S
EB
0
(31)
Energię tę oznaczono
następnie przez S i
wprowadzono
odpowiadający jej
wektor przepływu
energii zwany
wektorem Pointynga
Wielkość S jest wyrażona przez wartości chwilowe, więc
jest funkcją czasu.
Wektor S jest prostopadły do wektora E i do wektora B.
Wektor Pointynga pokazuje kierunek przenoszenia energii.
Z trzech wielkości występujących w równaniu (31), jedna
ma ściśle określoną wartość:
T m
0 4π 10
A
7
pozostałe c i 0 są mierzalne.
Na podstawie równania (1) wykorzystuje się zmierzoną
dokładnie wartość prędkości światła
c = 2.99792458 • 108 m/s
do wyznaczania wartości 0.
Otrzymane wyrażenie opisujące wektor
Pointinga odnosi się do mocy chwilowej
przenoszonej przez falę elektromagnetyczną.
Bardzo często potrzebna jest średnia moc fali.
1
1
S S
EB
E2
0
oc
1 2
E Em
2
2
E cB
Obliczano średnią
wartość kwadratu
sinusoidy
1
S
EB
E cB
0
1
1
2
S S
EB
E
0
oc
1 2
E Em
2
2
2
C
0 8.85 10
2
N m
T
7
0 4 10
m A
12
c
1
0 0
Przykład 5F
Obserwator znajduje się w odległości r = 1 m od
punktowego źródła promieniowania o mocy P0. P0 = 103 W.
Obliczyć wielkości pola elektrycznego i magnetycznego w
odległości r, uważając falę za płaską.
r=1m
P0 = 103 W
r
P0 4r S
2
P0
1
2
E
Em
2
2
Em
P0
4r 2
20c
2
Em
Em
2 P0 0 c
4
V
240
m
1
r
1
1
S S EB
E2
0
oc
1 2
E Em
2
2
Em
240 V / m
7
Bm
8
10
T
8
c
3 10 m / s
Prędkość c, mimo że dotyczy wszystkich fal
elektromagnetycznych, nazywa się prędkością
światła.
W roku 1888 Heinrich Hertz przeprowadził po
raz pierwszy eksperyment, w którym były
wytwarzane i odbierane fale
elektromagnetyczne, dowodząc tym samym ich
istnienia i potwierdzając słuszność równań
Maxwella.
Przykład 6F.
Średnia moc lasera jest równa P = 2.0 mW, a jego
wiązka ma średnicę d = 1 mm. Jaka jest gęstość
strumienia energii fali elektromagnetycznej? Jaka
jest wartość amplitudy pola elektrycznego?
Przyjąć, że laser wysyła płaska falę
monochromatyczną.
1 mm
1
1
S S
EB
E2
0
o c
1 2
2
Śr. wartość wektora S.
E Em
2
jest równa gęstości
strumienia energii,
Em cBm
c 0 1 2
1 1
1 2
S
Em
Em c 0 Em
0c 2
c 2
2
2
0
1
c 2 0
P
d
4
2
S
1
P
2
s c 0 Em
2
2
d
2
2 P 1 d
Em
c 0
2
2
V
1400
V B Em
m 4.7 10 6 T
Em 1400
m
c
8 m
m
3 10
s
Przykład 7F
Energia fali elektromagnetycznej składa się z
energii pola elektrycznego i magnetycznego.
Wykazać, że dla fali płaskiej w próżni gęstości
obu rodzajów energii są sobie równe. Ile wynosi
ich średnia wartość w okresie? Jaka jest
średnia moc przenoszona przez falę płaską na
jednostkę powierzchni A? Czy otrzymane
wyrażenie pozostaje w zgodzie z wzorem
Pointynga?
A=1
1
1 2
2
dW 0 E
B Adx
2 0
2
E cB
c
1
0 0
1
1
1 2
1
1 2
2 2
2
dW 0 B c
B Adx 0 B
B Adx
2 0
0 0 2 0
2
2
1 2 1
1
2
dW B
B Adx
2
2
0
0
Energia przepływająca w czasie dt przez
powierzchnię A
2
2
dW
B
dx B
A
c
dtA 0 A dt 0
dx
c
dt
Na podstawie
wartości wektora
Pointynga:
dw
EBAdx
1
1
EB
cB 2
dt A μ cs dx μ0
0
0
c