POLE MAGNETYCZNE
Własności pola magnetycznego
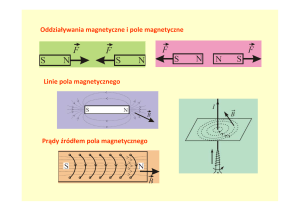
powstawanie pola magnetycznego
W przestrzeni otaczającej przewodnik z prądem elektrycznym istnieje pole magnetyczne.
Jego istnienie przejawia się tym, że oddziałuje ono siłowo na igłę magnetyczną i na poruszające się
ładunki elektryczne.
Zjawisko to wykrył (ok. 1820 roku) duński fizyk Hans Christian Örsted (na rysunku przyrząd
wykorzystywany przez niego do eksperymentów - można go oglądać w wirtualnym muzeum fizyki
Uniwersytetu w Coimbra: http://www1.fis.uc.pt/museu/indexi.htm). Rozpoznał je i trafnie opisał
André-Marie Ampère - twórca teorii elektromagnetyzmu.
Dało to początek całej serii odkryć, które w krótkim czasie doprowadziły do przemysłowego
wykorzystywania energii elektrycznej.
Również w magnesie stałym źródłem pola magnetycznego jest prąd elektryczny: Jest to
uporządkowany ruch elektronów w tworzących magnes atomach materiału ferromagnetycznego.
Elektron (z atomu Borha) o ładunku e 0 poruszający się w ruchu orbitalnym wokół jądra atomu z
prędkością kątową ω0 stanowi prąd elektryczny o natężeniu:
e ⋅ω
i=− 0 0
2π
Prąd ten jest źródłem pola magnetycznego. Dla uporządkowanych (w kryształ) struktur atomowych
niektórych pierwiastków daje to wypadkowe pole magnetyczne. W ten sposób powstają domeny
magnetyczne. Uporządkowanie ich przez zewnętrzne pole magnetyczne prowadzi do powstania
magnesu stałego.
Zatem źródłem pola magnetycznego jest zawsze prąd elektryczny, a więc poruszające się ładunki
elektryczne. Ponieważ poruszanie się jednych ciał względem innych jest zjawiskiem względnym
prowadzi to do sprzeczności: gdy ładunki poruszają się względem jednego układu mogą jednocześnie
być nieruchome względem innego układu, tak więc z punktu widzenia pierwszego układu istnieje prąd
elektryczny i pole magnetyczne a nie ma ich z punktu widzenia drugiego układu. Sprzeczność tę
próbowano usuwać wprowadzając koncepcję eteru. Miał to być niewidzialny, nieważki, sprężysty
ośrodek wypełniający całą przestrzeń i stanowiący uniwersalny układ odniesienia (autorem tej
koncepcji jest James Clerk Maxwell; równania Maxwella pierwotnie opisywały właśnie „fale eteru”).
Jednak hipotezy tej nie dało się utrzymać. Przeczyła jej stwierdzona doświadczalnie stałość prędkości
światła. Właściwe rozwiązanie znalazł na początku XX wieku Albert Einstein. Teorię magnetyzmu
uczynił częścią swojej szczególnej teorii względności (praca przedstawiająca szczególną teorię
względności nosi tytuł: „O elektrodynamice ciał w ruchu”). Zgodnie z tą teorią istnienie pola
magnetycznego jest efektem relatywistycznym oddziaływania ruchu na właściwości elektryczne ciał
Pole magnetyczne - str.: 1
(upraszczając zagadnienie: skutkiem relatywistycznej zmiany wymiarów ciał zmienia się gęstość ich
ładunków co powoduje zmiany sił z jakimi te ładunki oddziaływają).
Pole magnetyczne powstaje gdy zmienia się pole elektryczne. Zmiany pola magnetycznego powodują
powstawanie zmieniającego się pola elektrycznego. Stąd fala elektromagnetyczna.
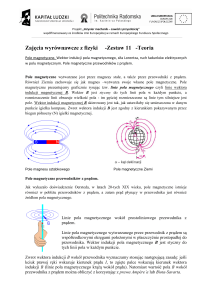
linie sił pola magnetycznego
Linie sił pola magnetycznego to linie wzdłuż których działają siły pola. Wzdłuż tych linii ustawia się
igła magnetyczna. Linie sił pola magnetycznego tworzą zamknięte kontury („wiry”). Jako takie nie
mają ani początków ani końców (które by wychodziły z jakiegoś źródła, jak np. linie sił pola
elektrostatycznego, dla których takimi źródłami są ładunki). W przypadku odosobnionego
przewodnika kontury te są okręgami.
Opisane właściwości linii sił pola magnetycznego stanowią o tym, że pole magnetyczne jest wirowe,
bezźródłowe.
Chcąc wyznaczyć zwrot linii pola magnetycznego stosuje się regułę śruby prawoskrętnej (pierwotna
wersja tej reguły to sformułowana przez Ampera „reguła pływaka”). Gdy ruch postępowy śruby
prawoskrętnej jest zgodny ze zwrotem prądu to zwrot linii sił pola magnetycznego wokół przewodnika
z tym prądem jest zgodny ze zwrotem ruchu obrotowego śruby.
Reguła śruby prawoskrętnej pozwala wyznaczyć zwrot linii sił pola magnetycznego wytwarzanego
przez solenoid - cewkę złożoną z nawiniętych na walcu zwojów przewodnika.
Magnes stały i solenoid mają identyczne pole magnetyczne.
Wielkości fizyczne charakteryzujące pole magnetyczne
indukcja magnetyczna
Pole magnetyczne działa siłowo na ładunki elektryczne pozostające w ruchu a więc na przewodnik z
prądem elektrycznym (i na igłę magnetyczną zbudowaną z uporządkowanych domen magnetycznych).
Gdy linie sił pola magnetycznego są prostopadłe do przewodnika, siła z jaką pole działa na
przewodnik jest wprost proporcjonalna do natężenia prądu (I) i do długości przewodnika (∆l):
F = B ⋅ I ⋅ ∆l
Pole magnetyczne - str.: 2
Współczynnik proporcjonalności „B”, charakteryzuje siłowe właściwości pola.
Jest on modułem wielkości fizycznej: indukcji magnetycznej (wektora indukcji magnetycznej).
W ogólniejszym przypadku (gdy linie sił pola nie są prostopadłe do przewodnika) zależność
uwzględniająca wektorowy charakter siły i indukcji jest iloczynem wektorowym:
F = I ⋅ ( ∆l × B)
Moduł tego iloczynu jest równy:
F = I ⋅ ∆l ⋅ B ⋅ sin ϕ
gdzie ϕ = ∠( ∆l, B) - kąt pomiędzy wektorami "∆l" i "B".
Kierunek wektora siły „F” jest prostopadły do płaszczyzny wyznaczonej przez wektory „∆l” i „B”, a
zwrot ustala się z reguły śruby prawoskrętnej „przekręcając” wektor "∆l" w kierunku wektora „B”.
Wzory te są wzorami definicyjnymi indukcji magnetycznej.
Zwrot siły działającej na przewodnik z prądem można także wyznaczyć stosując regułę lewej dłoni:
Jeżeli linie sił pola magnetycznego padają na lewą dłoń a prąd w przewodniku płynie w kierunku
wyprostowanych palców to siła działająca na przewodnik jest skierowana w kierunku wskazywanym
przez kciuk.
Powyższe wzory zakładają one, że przewód jest prostoliniowy a pole magnetyczne równomierne na
całej jego długości.
Równomierne pole magnetyczne to takie pole, w każdym punkcie którego wektory indukcji mają taką
samą wartość i taki sam zwrot.
Pole magnetyczne - str.: 3
W ogólnym przypadku w każdym punkcie wartość i zwrot wektora indukcji magnetycznej mogą być
inne a przewód może być krzywoliniowy.
Jest wtedy:
∆F 1 dF
B = lim
=
I
∆l → 0 ⋅ ∆l I dl
oraz
F = I ∫ (dl × B)
l
Jest to całka z iloczynu wektorowego wektorów obliczana wzdłuż krzywej „l” w polu magnetycznym
opisanym przez wektor indukcji.
Indukcję magnetyczną jako wielkość fizyczną definiuje się także przy pomocy koncepcji
elementarnego zwoju próbnego (por. ładunek próbny z teorii pola elektrycznego) z prądem I pr i o
znikomo małej powierzchni A pr umieszczonego w danym punkcie badanego pola magnetycznego.
Moduł wektora indukcji magnetycznej pola w danym miejscu określony jest wzorem:
B=
Mmax
A pr → 0 A pr ⋅ I pr
lim
M max występuje gdy zwój próbny jest umieszczony prostopadle do linii sił pola.
Wyznacza to zwrot wektora indukcji.
Jednostką indukcji magnetycznej jest tesla - T
W ⋅s
1[F]
N
A ⋅V ⋅s V⋅s
1[B] =
=
= m =
=
= 1T
1[I] ⋅ 1[ I] m ⋅ A m ⋅ A m 2 ⋅ A m 2
albo:
1[M ]
N⋅m
W ⋅s
A⋅V ⋅s V ⋅s
1[B] =
=
=
=
=
= 1T
1[A ] ⋅ 1[I] m 2 ⋅ A m 2 ⋅ A m 2 ⋅ A m 2
(w zależności od zastosowanego wzoru)
Iloczyn V ⋅ s jest też jednostką układu SI. Nosi nazwę webera - Wb
Jest zatem:
Wb
1[B] = 1T = 1
m2
W starszych książkach można spotkać dawną jednostkę indukcji magnetycznej (z układu jednostek
CGS - centymetr-gram-sekunda).
Był nią gauss - 1 G. 1G = 10 −4 T .
Strumień indukcji magnetycznej (strumień magnetyczny)
Φ S = ∫ B ⋅ dS
S
gdzie: S - powierzchnia
Pole magnetyczne - str.: 4
Dla pola równomiernego jest:
gdzie
Φ S = B ⋅ S = B ⋅ S ⋅ cosα
α - kąt pomiędzy liniami sił pola magnetycznego a prostą prostopadłą do powierzchni "S"
Jednostką strumienia magnetycznego jest weber - Wb
1[Φ ] = 1[B] ⋅ 1[S] = 1T ⋅ m 2 = 1Wb
natężenie pola magnetycznego
Wektor indukcji magnetycznej opisuje siłowe właściwości pola magnetycznego, pozwala obliczać
siłę z jaką pole działa na przewodnik z prądem. Strumień magnetyczny (strumień indukcji
magnetycznej) jest wielkością w stosunku do indukcji pochodną.
Obok nich do opisu pola magnetycznego stosowane są jeszcze i inne wielkości fizyczne.
Aby powstało pole magnetyczne potrzebny jest ruch ładunków elektrycznych (lub zmiana pola
elektrycznego). Jednak, jak to wykazują eksperymenty , prąd o takim samym natężeniu płynący w tym
samym przewodniku powoduje powstanie pola magnetycznego o różnych wartościach wektora
indukcji w zależności od właściwości środowiska, w którym to pole występuje. Stąd potrzeba jeszcze
jednej wielkości fizycznej opisującej pole (po to by można było opisać pole niezależnie od
środowiska, w którym występuje - „od strony” prądu, który to pole wywołuje).
Wielkością tą jest natężenie pola magnetycznego (wektor natężenie pola magnetycznego).
Definiuje się je z zastosowaniem koncepcji solenoidu próbnego (por. zwój próbny z jednej z definicji
indukcji magnetycznej). Jest to ceweczka o znikomych (dążących do zera) wymiarach, złożona z „z”
l
zwojów. Stosunek długości „l” ceweczki do jej średnicy „d” dąży do nieskończoności: → ∞ (w
d
l
praktyce pomiarowej > 10 ).
d
Solenoid ten umieszcza się w danym punkcie pola (tym, którego natężenie ma być wyznaczone) i
przepuszcza przezeń prąd o takim zwrocie i takim natężeniu by wytworzone przez solenoid pole w
pełni skompensowało pole badane (w badanym punkcie, a więc wewnątrz solenoidu).
Moduł wektora natężenia pola wyznacza się z zależności:
Pole magnetyczne - str.: 5
H=
I⋅z
l
Kierunek i zwrot wektora natężenia pola jest taki jak kierunek i zwrot linii sił pola magnetycznego w
danym punkcie (a więc taki sam jak zwrot wektora indukcji magnetycznej).
Jednostką natężenia pola magnetycznego jest amper na metr
1[H ] =
1[ I] ⋅ 1[ z] A
=
1[l]
m
Dawną jednostką natężenia pola magnetycznego należącą do nieużywanego już układu jednostek CGS
jest ersted - 1 Őe.
A
A
1
1Õe =
≈ 79,6
m
0,4 ⋅ π cm
Pomiędzy natężeniem pola magnetycznego i indukcją magnetyczną istnieje zależność:
B = µ ⋅H
gdzie: µ - przenikalność magnetyczna
µ = µ0 ⋅ µr
µ
µr =
- przenikalność magnetyczna względna
µ0
H
µ 0 = 4π ⋅ 10 − 7
- przenikalność magnetyczna próżni
m
Jest też:
ε 0 ⋅ µ 0 ⋅ c 02 = 1
c 0 - prędkość światła w próżni
Wpływ środowiska na właściwości pola magnetycznego opisuje się także przy pomocy jeszcze jednej
wektorowej wielkości fizycznej: wektora magnetyzacji:
B = µ ⋅ H = µ 0 ⋅ (H + J) = µ 0 ⋅ H + µ 0 ⋅ J
gdzie: J - wektor magnetyzacji
Istnieje jeszcze inna postać tej zależności:
B = µ ⋅ H = µ 0 ⋅ H + µ 0 κ m ⋅ H = µ 0 ⋅ (1 + κ m ) ⋅ H
gdzie: κ m - podatność magnetyczna
wobec:
B = µ 0 ⋅ µ r ⋅ H = µ 0 ⋅ (1 + κ m ) ⋅ H
jest:
µr =1 + κm
Ze względu na wielkość przenikalności magnetycznej względnej ( µ r ) ciała dzielimy na:
1. diamagnetyki - µ r < 1 (woda, krzem, miedź, bizmut, srebro)
2. paramagnetyki - µ r > 1 (platyna, aluminium, powietrze)
Pole magnetyczne - str.: 6
3. ferromagnetyki - µ r >> 1 (żelazo, kobalt, nikiel)
Przenikalność diamagnetyków i paramagnetyków jest przybliżeniu równa 1.
Przykładowo µ rCu ≈ 0,999991 , µ rBs ≈ 0,9998 i µ rPt ≈ 1,00027 , µ rAl ≈ 1,00002
Wielkość przenikalności względnej dla ferromagnetyków jest nieliniową funkcją natężenia pola.
Przebieg krzywej magnesowania wynika z porządkowania występujących
ferromagnetycznym domen magnetycznych.
W krzywej magnesowania występuje tzw. pętla histerezy magnetycznej.
w
materiale
Punkty charakterystyczne pętli to:
B r - indukcja remanencji (szczątkowa) - wartość indukcji jaka pozostanie po usunięciu
zewnętrznego pola magnetycznego;
H c - natężenie koercji (powściągające) - wartość natężenia zewnętrznego pola
magnetycznego potrzebna by „powściągnąć” pole powstałe po uporządkowaniu dipoli.
Obok pętli histerezy występuje tu także krzywa magnesowania pierwotnego. Opisuje ona zmianę
indukcji w funkcji natężenia pola gdy proces narastania natężenia pola rozpoczął się przy braku
magnetyzmu szczątkowego.
Na ogół w obliczeniach inżynierskich wykorzystuje się nie pętlę histerezy lecz tę właśnie krzywą.
Obliczenia takie są na tyle niedokładne, że uwzględnienie histerezy nie zwiększyłoby jakości ich
wyników natomiast w sposób znaczący by skomplikowało ich przeprowadzanie.
Prawa fizyczne opisujące pole magnetyczne
prawo Ampera
Całka liniowa w polu wektorowym z natężenia pola magnetycznego H po krzywej zamkniętej równa
się przepływowi prądu przez powierzchnię rozpiętą na tej krzywej.
∫ H ⋅ dl = ∫ j ⋅ dS
l
gdzie:
∫ j ⋅ dS = ΘSl
Sl
- przepływ prądu (okład prądowy)
Sl
j - gęstość prądu
Własność ta nosi nazwę prawa Ampera albo prawa przepływu.
Jeżeli przez powierzchnię S” przechodzi „z” zwojów, w których płynie ten sam prąd o natężeniu „I”
przepływ wynosi:
Θ = z⋅I
Jego jednostką są amperozwoje.
Pole magnetyczne - str.: 7
Przepływ w teorii obwodów magnetycznych nazywany jest siłą magnetomotoryczną i oznaczany:
Fµ .
Prawo Ampera wiąże ze sobą wielkości charakteryzujące pole magnetyczne z wielkościami
elektrycznymi. Stanowi ono o tym, że pole magnetyczne jest polem wirowym nie jest zaś polem
potencjalnym.
Jego uogólnieniem jest jedno z równań Maxwella:
∂D
rotH = γE +
∂t
Gdy droga całkowania przy obliczaniu całki liniowej wektora natężenia pola magnetycznego nie jest
zamknięta otrzymuje się napięcie magnetyczne:
U µAB =
∫ H ⋅ dl
l AB
Wartość tak wyliczonej całki nie zależy od wyboru drogi (o ile nie zawiera ona pętli, przez które
przepływa prąd).
Jednostką napięcia magnetycznego jest amper
1[ Uµ] = 1[H] ⋅ 1[l] = 1
A
⋅1 m = 1 A
m
W teorii obwodów magnetycznych stosuje się uproszczoną (tzw. „inżynierską”) postać prawa Ampera.
Całka liniowa po krzywej zamkniętej zastąpiona jest sumą iloczynów skalarnych wektorów „∆l” i „H”
po odcinkach łamanej :
∑ H i ⋅ ∆li ⋅ cos α i =z ⋅ I
i
Jeżeli odcinki łamanej przeprowadza się wzdłuż linii sił pola magnetycznego czynnik cosα i jest
równy jedności i wzór na prawo Ampera przybiera („inżynierską”) postać:
Pole magnetyczne - str.: 8
∑ H i ⋅ ∆li =z ⋅ I
i
Właśnie w takiej postaci prawa Ampera stosowane jest jako II prawo Kirchhoffa dla obwodów
magnetycznych.
prawo Gaussa
Ponieważ linie sił pola magnetycznego tworzą zamknięte kontury (wiry) strumień indukcji
magnetycznej (strumień magnetyczny) przez powierzchnię boczną dowolnej bryły (przez
powierzchnię zamkniętą) jest równy zeru:
∫ B ⋅ dS = 0
S
Własność ta nosi nazwę prawa Gaussa.
Stanowi ona o tym, że pole magnetyczne jest polem bezźródłowym.
Uogólnieniem prawa Gaussa jest jedno z (tzw. dodatkowych) równań Maxwella:
divB = 0
W postaci „inżynierskiej” całkowanie zastępuje się sumą strumieni magnetycznych:
∑ B k ⋅ dS k = ∑ Φ k = 0
k
k
W takiej postaci prawa Gaussa stosowane jest jako I prawo Kirchhoffa dla obwodów magnetycznych.
wzór Laplace’a
Wzorem pozwalającym wyznaczyć w danym punkcie natężenie pola magnetycznego powstałego
skutkiem przepływu prądu w przewodniku o dowolnej (znanej) konfiguracji jest wzór Laplace’a
(zwany niekiedy wzorem Biota i Savarta):
dH =
I dl × r
⋅
4π r 3
gdzie: I - natężenie prądu płynącego przez przewodnik
dl - element długości przewodnika
r - odległość między elementem przewodnika a punktem dla którego obliczane jest natężenie
pola (jako wektor)
α - kąt pomiędzy wektorami „dl” i „r”.
Wektor „dH” jest prostopadły do płaszczyzny wyznaczonej przez wektory „dl” i „r”, jego zwrot
określa reguła śruby prawoskrętnej (iloczyn wektorowy wektorów).
Pole magnetyczne - str.: 9
Natężenie pola od całego przewodnika jest całką:
H=
I
dl × r
⋅∫
4π
r3
l
Przykłady obliczania parametrów pola magnetycznego
pole magnetyczne przewodnika prostoliniowego
Korzystając z prawa Ampera można w prosty sposób wyznaczyć natężenie pola magnetycznego
odosobnionego, prostoliniowego przewodnika, w którym płynie prąd o natężeniu „I”.
Wybierzmy na drogę całkowania okrąg jaki stanowi linia sił położona w odległości „x” od
przewodnika z prądem. W każdym punkcie drogi całkowania wektor natężenia ma taką samą wartość
(„ H x ”) i jest skierowany wzdłuż tej drogi ( ∠(H, dl) = 0 ). Stąd całkowanie zmienia się w mnożenie:
∫ Hdl = I
lx
H x ⋅ l x = 2π ⋅ x ⋅ H x = I
Jest zatem:
Hx =
I
⋅
2π ⋅ x
Własność opisywana tym wzorem bywa nazywana prawem Biota i Savarta.
siły działające na dwa równoległe przewodniki z prądem
Dwa równoległe przewodniki znajdują się w odległości „a” jeden od drugiego w środowisku o
przenikalności magnetycznej „µ”. Płyną przez nie prądy o natężeniach I1 i I 2 . Należy wyznaczyć siły
działające na odcinki przewodników o długościach „l”.
Pole magnetyczne - str.: 10
Prąd I1 płynący w przewodniku pierwszym wytwarza pole magnetyczne, którego natężenie w
odległości „a” (a więc w miejscu gdzie znajduje się przewodnik drugi) ma wartość:
I
Ha = 1 ⋅
2π ⋅ a
Stąd wartość indukcji magnetycznej:
I
Ba = µ ⋅ 1 ⋅
2π ⋅ a
Zatem na odcinek o długości „l” przewodnika z prądem I1 działa siła:
I ⋅I
F = Ba ⋅ I 2 ⋅ l = µ ⋅ 1 2 ⋅ l ⋅
2π ⋅ a
Kierunek tej siły określa reguła lewej dłoni. Wynika z niej, że gdy prądy w obu przewodnikach mają
te same zwroty siła ta działa w kierunku przewodnika pierwszego. Przy zwrotach przeciwnych jest
odwrotnie (wykorzystuje się to w aparatach elektrycznych do tzw. elektrodynamicznego gaszenia
łuku).
Zazwyczaj oblicza się siłę elektrodynamiczną działającą na jednostkowy odcinek przewodu:
F' =
I ⋅I
F
= µ⋅ 1 2
l
2π ⋅ a
Oddziaływanie elektrodynamiczne dwu równoległych przewodników z prądem wykorzystywane jest
do definiowania jednego ampera jako jednostki układu SI. W definicji tej przewodniki są
nieskończenie długie i nieskończenie cienkie, mają przekroje idealnie kołowe a oddalone są od siebie
o jeden metr. Jeżeli obydwa prądy I1 i I 2 mają takie samo natężenie równe jednemu amperowi siła
N
elektrodynamiczna działająca na jednostkę długości przewodników wynosi F' = 4 ⋅ 10 − 7
.
m
pole magnetyczne cewki toroidalnej
Cewka toroidalna jest to cewka nawinięta na rdzeniu o kształcie torusa - powierzchni powstałej przez
obrót okręgu dookoła prostej leżącej w płaszczyźnie okręgu i nie przecinającej tego okręgu.
Dla cewki toroidalnej nawiniętej równomiernie wszystkie linie sił pola magnetycznego tworzą okręgi.
W przybliżeniu symetryczne jest również pole w uzwojeniu nawiniętym na części obwodu torusa.
Występujący tu strumień rozproszenia Φ r jest pomijalnie mały w porównaniu ze strumieniem
głównym Φ występującym wewnątrz torusa (zwłaszcza gdy rdzeń wykonany jest z materiału
ferromagnetycznego).
Strumień magnetyczny jest jednakowy w całym obwodzie torusa.
Jego wartość wynosi:
Φ = B Fe ⋅ S Fe
Pole magnetyczne - str.: 11
Stąd:
B Fe =
Φ
=
S Fe
Φ
π
4
Jest to wartość średnia indukcji - indukcja magnetyczna w torusie zmienia się bowiem w zależności od
odległości od centrum torusa.
W przypadku materiału ferromagnetycznego z jakiego zbudowany jest rdzeń cewki przenikalność
magnetyczna zależy w sposób nieliniowy od tego jakie jest natężenie pola:
( r2 + r1 ) 2
H Fe = µ(B Fe ) ⋅ B Fe
Stąd wartości natężenia nie można wyznaczyć dzieląc wartości indukcji przez przenikalność
magnetyczną. Odczytuje się ją z wykresu pierwotnej krzywej magnesowania.
Gdy znana jest wartość natężenia pola (jest to też wartość średnia) korzystając z prawa Ampera można
wyznaczyć potrzebny okład prądowy:
∫ H ⋅ dl = H ⋅ lśr = I ⋅ z
l śr
Całkowanie zamienia się tu w mnożenie gdyż w każdym punkcie drogi całkowania wektor natężenia
ma taką samą wartość i jest skierowany wzdłuż tej drogi ( ∠(H, dl) = 0 ).
Zatem szukana wartość prądu wynosi:
I=
H ⋅ l śr H ⋅ ( r2 + r1 ) ⋅ π
=
z
z
Pole magnetyczne - str.: 12