MECHANIKA NIEBA
WYKŁAD 9
08.05.2009 r
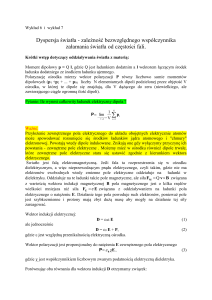
Orbita w przestrzeni
Elementy orbitalne
Ẑ
orbita
ẑ
płaszczyzna
odniesienia
ŷ
ognisko
Ω
Ŷ
x̂
perycentrum
ω
I
X̂
kierunek
odniesienia
a – wielka półoś
e – mimośród
Ω – długość węzła wstępującego
I – nachylenie orbity do płaszczyzny
odniesienia
ω – długość perycentrum w orbicie
T – czas przejścia przez perycentrum
węzeł
wstępujący
= Ω+ω – długość perycentrum
λ=M+ – długość średnia
u=ω+υ – argument szerokości
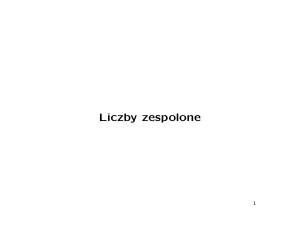
Orbita w przestrzeni
Elementy orbitalne
Ẑ
orbita
ẑ
płaszczyzna
odniesienia
ŷ
ognisko
Ω
Ŷ
x̂
perycentrum
ω
I
X̂
kierunek
odniesienia
węzeł
wstępujący
Przejście od układu współrzędnych
związanego z orbitą do układu
odniesienia polega na obrocie
wokół trzech osi:
a. obrót wokół osi z o kąt ω, wtedy
oś x pokrywa się z linią węzłów
b. obrót wokół osi x o kąt I, obie
płaszczyzny pokrywają się
c. obrót wokół osi z o kąt Ω
Orbita w przestrzeni
Elementy orbitalne
Każda z transformacji jest reprezentowana przez odpowiednią macierz obrotu:
0
0
cos sin 0
1
cos sin 0
P1 sin cos 0 P2 0 cos I sin I P3 sin cos 0
0
0 sin I cos I
0
0
1
0
1
Wtedy przejścia między układami dokonuje się poprzez:
X
x
Y P3 P2 P1 y
Z
z
x
X
1 1 1
y P1 P2 P3 Y
z
Z
Ponieważ wszystkie macierze obrotu są ortogonalne więc macierze odwrotne
są po prostu macierzami transponowanymi
Orbita w przestrzeni
Elementy orbitalne
Jeżeli ograniczymy się do współrzędnych w leżących w płaszczyźnie orbity:
X
r cos
Y P3 P2 P1 r sin
Z
0
cos cos sin sin cos I
r sin cos cos sin cos I
sin sin I
Obrót nie zmienia długości stąd wielka półoś i mimośród nie zmieniają się
Orbita w przestrzeni
Położenie planety z elementów orbitalnych
Mając dane elementy orbitalne możemy wyznaczyć jej współrzędne w
dowolnym układzie odniesienia.
Przykład:
wyznaczenie współrzędnych heliocentrycznych Jowisza
na dzień 25 września 1993 r, 6:32 UT
1. Parametry orbity:
parametr
Epoka 2000.0
25.09.1993 r
a [AU]
5.20336301
5.20332
e
0.04839266
0.0484007
I
1.̊30530
1.̊30537
Ω
100.̊55615
100.̊535
14.̊75385
14.̊7392
λ
34.̊40438
204.̊234
Murray, C.D. i Dermott, S.F.
1999, Solar System Dynamics,
Cambridge University Press
Orbita w przestrzeni
Położenie planety z elementów orbitalnych
2. M=λ-=189 .̊495
3. Rozwiązując równanie Keplera dostajemy: E=189 .̊059
4. Korzystając ze wzorów:
x a cos E e
y a 1 e 2 sin E
wyznaczamy współrzędne prostokątne Jowisza w płaszczyźnie jego orbity
Orbita w przestrzeni
Położenie planety z elementów orbitalnych
5. Następnie używając wartości I, Ω, wyznaczamy macierz, która pozwoli na przejście
do układu odniesienia (ekliptycznego):
0.254401 0.0223971
0.966839
P P3 P2 P1 0.254373
0.967097 0.00416519
0.0227198 0.00167014 0.99974
skąd:
X=-5.00336,
Y=-2.16249,
Z=0.121099
Orbita w przestrzeni
Zmiany elementów orbitalnych
a a 0 at
e e 0 e t
I
I I0
t
3600
0
t
3600
0
t
3600
0
360N r t
3600
Te przybliżone formuły pozwalają wyznaczyć
perturbowane parametry orbitalne planet
Układu Słonecznego z dokładnością rzędu 600’’
(w przedziale 1800 r. – 2050 r.)
gdzie t jest czasem wyrażonym w stuleciach juliańskich
począwszy od JD 2451545.0 (epoka 2000.0)
stulecie juliańskie = 36525 dni
Murray, C.D. i Dermott, S.F.
1999, Solar System Dynamics,
Cambridge University Press
Orbita w przestrzeni
Zmiany elementów orbitalnych
a0 (AU)
e0
I0 (o)
0 (o)
Ω0 (o)
λ0 ( o )
Merkury
0.38709893
0.20563069
7.00487
77.45645
48.33167
252.25084
Wenus
0.72333199
0.00677323
3.39471
131.53298
76.68069
181.97973
Ziemia
1.00000011
0.01671022
0.00005
102.94719
348.73936
100.46435
Mars
1.52366231
0.09341233
1.85061
336.04084
49.57854
357.15332
Jowisz
5.20336301
0.04839266
1.30530
14.75385
100.55615
34.40438
Saturn
9.53707032
0.05415060
2.48446
92.43194
113.71504
49.94432
Uran
19.19126393
0.04716771
0.76986
170.96424
74.22988
313.23218
Neptun
30.06896348
0.00858587
1.76917
44.97135
131.72169
304.88003
Dane dla Ziemi są w rzeczywistości parametrami orbity barycentrum układu Ziemia-Księżyc
Epoka 2000.0 (JD 2451545.0)
Orbita w przestrzeni
Zmiany elementów orbitalnych
a 0
e 0
I 0
0
0
0
Nr
Merkury
66
2527
-23.51
573.57
-446.30
261628.29
415
Wenus
92
-4938
-2.86
-108.80
-996.89
712136.06
162
Ziemia
-5
-3804
-46.94
1198.28
-18228.25
1293740.63
99
Mars
-7221
11902
-27.17
1560.78
-1020.19
217103.78
53
Jowisz
60737
-12880
-4.15
839.93
1217.17
557078.35
8
Saturn
-301530
-36762
6.11
-1948.89
-1591.05
513052.95
3
Uran
152025
-19150
-2.09
1312.56
1681.40
246547.79
1
Neptun
-125196
2514
-3.64
-844.43
-151.25
786449.21
0
Zmiany wielkiej półosi i mimośrodu są pomnożone przez 108, podczas gdy zmiany wielkości
kątowych zostały podane w sekundach łuku na stulecie
Epoka 2000.0 (JD 2451545.0)
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
Algorytm pozwalający z położenia (X,Y,Z) i prędkości (X,Y,Z) wyznaczyć elementy
orbitalne a, e, I, Ω, ν, T.
Zakładamy, że masy ciała centralnego i orbitującego są równe odpowiednio m1 i m2.
Mamy (w układzie odniesienia):
R 2 X 2 Y 2 Z2
2 Y
2 Z
2
V2 X
Wtedy:
YY
ZZ
R R XX
, ZX
XZ , XY
YX
c YZ ZY
2
c
R V 2
R
2
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
YY
ZZ
R R XX
, ZX
XZ , XY
YX
c YZ ZY
2
c
R V 2
R
2
R – długość promienia wodzącego
Ṙ – tempo zmian pr. wodzącego, znak Ṙ jest taki sam jak znak iloczynu R R ponieważ
R jest zawsze dodatnie
Potrzebne będą jeszcze rzuty momentu pędu:
c cos I c Z
c sin I sin c X
c sin I cos c Y
górny znak wybieramy jeśli
cz>0, a dolny dla cz<0
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
Możemy teraz przystąpić do wyznaczenia parametrów orbity (eliptycznej):
1. Wielką półoś wyznaczamy z równań:
R 2 X 2 Y 2 Z2
2 Y
2 Z 2
V2 X
2 1
V 2
R a
skąd dostajemy:
2
V2
a
R G m 1 m 2
1
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
2. mimośród wyznaczamy przy wykorzystaniu uzyskanego wyrażenia na a oraz
ze wzoru:
c a 1 e 2
otrzymujemy:
c2
e 1
G m1 m 2 a
3. Wyznaczamy nachylenie orbity, które jest kątem zawartym pomiędzy
wektorem momentu pędu a jego składową cz:
I arccos
cZ
c
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
4. Do wyznaczenia długości węzła wstępującego, Ω używamy:
c sin I sin c X
c sin I cos c Y
skąd otrzymujemy:
sin
cX
c sin I
cos
znak wybieramy w zależności od znaku cz
cY
c sin I
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
5. Argument szerokości ω+υ otrzymamy z wyrażeń na Z/R oraz X/R (pamiętając, że r=R):
X cos cos sin sin cos I
Y r sin cos cos sin cos I
Z
sin sin I
czyli:
Z
R sin I
X
cos sec sin sin cos I
R
sin
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
6. Następnie wyliczamy anomalię prawdziwą i długość perycentrum (w płaszczyźnie
orbity) przy użyciu:
a 1 e 2
R
1 e cos
wtedy:
1 a 1 e 2
cos
1
2 R
R
na
e sin
2
1 e
a 1 e 2
sin
R
ce
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
7. Na koniec wyliczamy moment przejścia przez perycentrum, T.
Aby tego dokonać wyznaczamy E ze wzoru:
R a 1 e cos E
a następnie z równania Keplera i III prawa Keplera:
nt T E e sin E
n 2a 3
otrzymujemy:
Tt
E e sin E
G m1 m 2 a 3
Orbita w przestrzeni
Wyznaczanie elementów orbitalnych
Powyższa procedura pozwala uzyskać elementy orbitalne w przypadku orbity eliptycznej.
Ze względów praktycznych warto jeszcze pozbyć się z równań czynnika G(m1+m2)
poprzez wybór innych jednostek.
Można tego dokonać skalując niezależną zmienną t przez czynnik
i wprowadzając nową zmienną czasową, τ taką, że: dt d
G m 1 m 2
Można zauważyć, że taki sam skutek odniesie założenie μ=1 w równaniu:
d2 r
r
0
2
3
dt
r
jeśli dodatkowo przyjmiemy za jednostkę długości wartość wielkiej półosi, to mamy
układ dwóch ciał, w którym mamy jednostkowy ruch średni i okres orbitalny równy
2π jednostek czasowych.
Zagadnienie dwóch ciał
Rozwinięcia w szereg
W rzeczywistości dokładnych rozwiązań
w mechanice nieba (i nie tylko ) jest niewiele.
Bardzo często posługujemy się rozwiązaniami
przybliżonymi bazującymi na rozwinięciach
w szeregi.
W Układzie Słonecznym korzystamy często z
faktu, że orbity różnią się niewiele od koła
(rozwijanie względem małych e), tworzą małe
kąty z płaszczyzną ekliptyki (małe I).
Innym zagadnieniem, w którym często korzysta
się z rozwinięć w szereg jest teoria perturbacji
Zagadnienie dwóch ciał
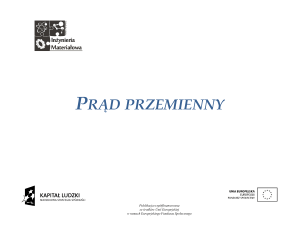
Trygonometryczny szereg Fouriera
Dana jest pewna funkcja okresowa f(x) bezwzględnie całkowalna w przedziale
(-T/2, T/2), gdzie T jest okresem.
Rozwinięcie f(x) w szereg Fouriera ma postać:
a0
2n
2n
Sx a n cos
x b n sin
x
2 n 1
T
T
współczynniki an i bn:
an
T
2
2
2n
f
x
cos
xdx
T T
T
n 0,1,2,3,
2
bn
T
2
2
2n
f
x
sin
xdx
T T
T
2
n 1,2,3,
Zagadnienie dwóch ciał
Trygonometryczny szereg Fouriera
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Napiszmy równanie Keplera w postaci:
E M e sin E
różnica E-M jest nieparzystą funkcją okresową stąd prawą stronę możemy rozwinąć
w szereg Fouriera biorąc tylko wyrazy nieparzyste:
e sin E b s e sin sM
s 1
gdzie:
2
2
2
b s e e sin E sin sMdM e sin E cos sM cos sMde sin E
0
s
0 s 0
pierwszy czynnik w tym wyrażeniu jest równy 0.
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Korzystając znów z równania Keplera możemy napisać:
de sin E dE M
wtedy:
2
2
b s e cos sMdM cos sMdE
s 0
s 0
Pierwsza z tych całek jest równa 0, natomiast drugą można przekształcić (znów przy
użyciu równania Keplera) do postaci:
2
b s e cossE se sin E dE
s 0
Całka występująca w tym równaniu może być zapisana przy użyciu funkcji Bessela
pierwszego rodzaju.
2
b s e J s se
s
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Dla dodatnich wartości s możemy napisać:
x 2
1x
J s x 1
s! 2 0
!s 1s 2s
s
2
ten szereg jest zbieżny dla wszystkich x.
Funkcje Bessela dla s=1,…,5
1
1 3
1 5
J 1 x x x
x Ox 7
2
16
384
1
1
J 2 x x 2 x 4 Ox 6
8
96
1
1 5
J 3 x x 3
x Ox 7
48
768
1 4
J 4 x
x Ox 6
384
1
J 5 x
x 5 Ox 7
3840
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Możemy ostatecznie napisać rozwiązanie równania Keplera w postaci:
1
E M 2 J s se sin sM
s 1 s
1
1
3
M e sin M e 2 sin 2M e 3 sin 3M sin M
8
2
8
1
1
e 4 sin 4M sin 2M Oe 5
6
3
szereg jest szybko zbieżny dla małych wartości e. W przypadku e>0.6627434 staje
się jednak rozbieżny.
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Zależność między promieniem i wielką półosią daje:
r
1 e cos E
a
rozwijając czynnik ecosE dostajemy:
r
1 2
1 d
1 e 2e 2 J s se
s 1 s de
a
2
po uwzględnieniu jawnej postaci funkcji Bessela mamy ostatecznie:
r
e2
3e 3
cos M cos 3M
1 e cos M 1 cos 2M
a
2
8
e4
cos 2M cos 4M Oe 5
3
To rozwinięcie będzie wykorzystywane m.in. w tzw. przybliżeniu „guiding centre” oraz
przy analizie perturbacji.
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Przekształcając znów wyrażenie:
dostajemy:
cos E
1 r a
e
r
1 e cos E
a
Uwzględniając otrzymane wcześniej rozwinięcie r/a możemy wyznaczyć rozwinięcie
cosE:
1
1 d
cos E e 2 2 J s se cos sM
s 1 s de
2
e
3e 2
cos 3M cos M e 3 1 cos 4M 1 cos 2M
cos M cos 2M 1
2
8
3
3
45
125
5
e4
cos M
cos 3M
cos 5M Oe 5
128
384
192
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Różniczkując równanie Keplera dostaniemy:
dE
1
dM 1 e cos E
prawa strona jest równa a/r.
Różniczkując otrzymane wcześniej wyrażenie:
1
E M 2 J s se sin sM
s 1 s
otrzymujemy:
dE
1 2 J s se cos sM
s 1
dM
stąd mamy rozwinięcie a/r w szereg przy użyciu funkcji Bessela
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Korzystając z otrzymanego rozwinięcia a/r możemy wyznaczyć:
3
9
53
a
3 27
2 3
1 3e cos M e cos 2M e cos M cos 3M
8
r
2 2
8
77
15 7
e 4 cos 2M cos 4M Oe 5
8
8 2
które jest przydatne przy analizie perturbacji planetarnych
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Korzystając z równania biegunowego elipsy:
a 1 e 2
r
1 e cos
możemy napisać:
1 1 e2 a
cos
e
e r
które po uwzględnieniu rozwinięcia a/r daje:
21 e 2
cos e
J s se cos sM
s 1
e
9e 2
4e 3
cos 3M cos M cos 4M cos 2M
cos M ecos 2M 1
8
3
225
625
25
e4
cos M
cos 3M
cos 5M Oe 5
128
384
192
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Rozwinięcie sinν otrzymujemy w nieco bardziej skomplikowany sposób.
Równanie biegunowe elipsy zapiszemy w postaci:
r
1 e2
a 1 e cos
Różniczkujemy po M:
d r
e r
d
sin
dM a 1 e 2 a
dM
2
korzystając z całki pól, definicji anomalii średniej i trzeciego prawa Keplera:
r 2 const a 1 e 2 ; M nt T ; n 2 a 3
otrzymamy:
r2
d
a 2 1 e2
dM
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Korzystając z otrzymanego wyrażenia mamy:
d r
e r
d
d r
e
sin
sin
2
2
dM a 1 e a
dM
dM a
1 e
2
skąd:
1 e2 d r
sin
e dM a
i ostatecznie:
1d
J s se sin sM
s 1 s de
7
7
9
4
sin M e sin 2M e 2 sin 3M sin M e 3 sin 4M sin 2M
8
6
8
3
207
625
17
e4
sin M
sin 3M
sin 5M Oe 5
128
384
192
sin 2 1 e
2
Te rozwinięcia są użyteczne przy badaniu rezonansu typu „spin-orbita” oraz przy
badaniu perturbacji.
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Kolejne rozwinięcie dotyczy różnicy anomalii ν-M zwanego równaniem środka.
Dzięki niemu jesteśmy w stanie wyrazić anomalię prawdziwą w funkcji czasu jaki
upłynął od przejścia ciała przez perycentrum. Korzystamy z całki pól w postaci:
r 2 na 2 1 e 2
Korzystając z:
dM ndt; r a 1 e cos E ; n 2 a 3
otrzymamy:
1 e2
2 dE
d
dM
1
e
dM
2
dM
1 e cos E
2
Zagadnienie dwóch ciał
Rozwinięcia w szereg
Uwzględniając w otrzymanym wyrażeniu wyznaczoną wcześniej postać dE/dM i
całkując dostajemy:
5 2
1
3 13
M 2e sin M e sin 2M e sin 3M sin M
4
4
12
11
103
e4
sin 4M sin 2M Oe 5
24
96
które będzie używane w przybliżeniu „guiding centre”.