Prawo indukcji elektromagnetycznej
Tekst jest wolnym tłumaczeniem plików guide10.pdf i guide11.pdf kursu dostępnego na
stronie http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/coursenotes/index.htm
Wszystkie rysunki i animacje zaczerpnięto ze strony
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/index.htm
Dotychczas rozpatrywaliśmy stacjonarne pola elektryczne (zwane elektrostatycznymi) i
magnetyczne (zwane magnetostatycznymi), które wytwarzane były nieruchomymi ładunkami
lub stałym prądem elektrycznym.
Czy jest możliwe wytworzenie pola elektrycznego za pomocą pola magnetycznego?
Zjawisko generowania pola elektrycznego przez pole magnetyczne wykrył Michael
Faraday w 1831 r., które zwane jest dzisiaj indukcją elektromagnetyczną. Poniżej
przedstawiamy ilustrację tego zjawiska
1
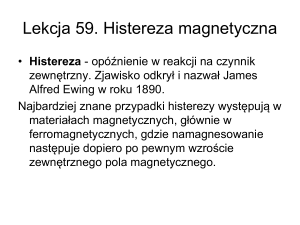
Faraday pokazał doświadczalnie, że prąd w obwodzie zamkniętym (patrz rys.)
nie popłynie, jeśli magnes sztabkowy pozostaje nieruchomy względem pętli (patrz
rys. środkowy). Wychylenie się wskazówki galwanometru (miernika natężenia
prądu elektrycznego w pętli) zależy od tego, czy magnes zbliża się czy też oddala
się od pętli (patrz rys. górny i dolny).
Eksperyment Faradaya wskazuje na to, że pętla przewodnika zachowuje się
jak źródło prądu (EMF=SEM). Wartość SEM zależy od tego w jakim tempie zmienia
się w czasie magnetyczny strumień przenikający przez pętlę (obejmowany pętlą).
Strumień magnetyczny
Rozpatrzmy stałe pole przenikające przez powierzchnię 𝑆, co pokazuje rys.
poniżej
̂ , gdzie wersor 𝐧
̂ jest
Niech wektor powierzchni będzie dany 𝑨 = 𝐴𝐧
prostopadły do 𝑆. Strumień magnetyczny pola jednorodnego przez tę
powierzchnię wynosi
ΦB = 𝑩 ∙ 𝑨 = 𝐵 ∙ 𝐴 ∙ cos 𝜃.
Jeśli pole nie jest jednorodne, to
ΦB = ∬ 𝑩 ∙ d𝑨.
𝑆
W SI jednostką strumienia jest weber (Wb): 1 Wb=1T1m2.
2
Prawo indukcji elektromagnetycznej Faradaya
Indukowana siła elektromotoryczna 𝜀SEM w pętli przewodnika jest
równa
𝜀SEM
dΦB (𝑡)
=−
,
d𝑡
gdzie ΦB (𝑡) jest strumieniem magnetycznym przenikającym przez
pętlę.
Jeśli przewodnikiem jest solenoid o N zwojach, to
𝜀SEM
gdzie
dΦB (𝑡)
d𝑡
dΦB (𝑡)
= −𝑁
,
d𝑡
odnosi się do jednego zwoju cewki.
Ze względu na wzór ΦB (𝑡) = 𝑩(𝑡) ∙ 𝑨(𝑡) = 𝐵(𝑡) ∙ 𝐴(𝑡) ∙ cos[𝜃(𝑡)] z prawa
Faradaya wynika, że
𝜀SEM = −
dΦB (𝑡)
d𝑡
d𝐵(𝑡)
d𝐴(𝑡)
= −(
) 𝐴(𝑡) ∙ cos[𝜃(𝑡)] − (
) 𝐵(𝑡) ∙ cos[𝜃(𝑡)]
d𝑡
d𝑡
d𝜃 (𝑡)
[
(
)
(
)
(
)]
+ 𝐵 𝑡 ∙ 𝐴 𝑡 ∙ sin 𝜃 𝑡 (
).
d𝑡
Zatem SEM może być indukowana w następujący sposób:
(a) Zmienia się w czasie pole magnetyczne 𝑩
3
b) Zmienia się w czasie wektor 𝑨
(c) Zmienia się w czasie kąt 𝜃
Znakomity film przedstawiający jasno i dobitnie zjawisko indukcji elektromagnetycznej jest
dostępny na stronie http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/inductance/inductance.htm
4
Na stronie http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/inductance/inductance.htm są
dostępne dwie animacje tego samego zjawiska
Kierunek SEM określa reguła Lenza (reguła przekory)
Indukowany prąd elektryczny generuje pole magnetyczne przeciwdziała
zmianie strumienia magnetycznego, który wyindukował ten prąd.
W celu ilustracji działania tej reguły rozpatrzmy pętlę przewodnika
umieszczoną w polu magnetycznym. Postępujemy w następujący sposób:
1. Określamy dodatni kierunek wektora powierzchni 𝑨.
2. Zakładamy, że pole magnetyczne jest jednorodne i wyznaczamy
wartość iloczynu skalarnego 𝑩 ∙ 𝑨. Pozwala to nam określić znak
strumienia magnetycznego ΦB = 𝑩 ∙ 𝑨.
3. Obliczamy szybkość (tempo) zmian w czasie ΦB = 𝑩 ∙ 𝑨, czyli
pochodnej
dΦB (𝑡 )
d𝑡
. Są możliwe
trzy przypadki
> 0 → 𝜀SEM < 0
dΦB (𝑡)
: { < 0 → 𝜀SEM > 0 .
d𝑡
= 0 → 𝜀SEM = 0
4. Wyznaczamy kierunek przepływu indukowanego prądu stosując
regułę prawej dłoni.
5
Kierujemy kciuk prawej dłoni zgodnie z kierunkiem i zwrotem wektora 𝑨.
a) Indukowany prąd ma kierunek przepływu wskazywany przez palce
prawej dłoni, jeśli 𝜀SEM > 0.
b) Indukowany prąd ma kierunek przepływu przeciwny do
wskazywanego przez palce prawej dłoni, jeśli 𝜀SEM < 0.
6
Kolejny rysunek reprezentuje 4 możliwe scenariusze pola magnetycznego
zmieniającego się w czasie. Pokazuje on także zastosowanie reguły Lentza w celu
wyznaczenia kierunku przepływu prądu indukowanego.
Podsumowaniem wyników jest poniższa tabela
7
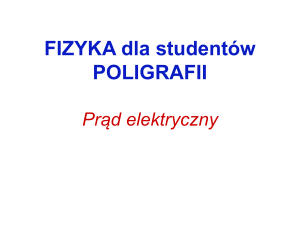
Rozważmy konkretną sytuację przedstawioną na kolejnym rysunku
Biegun płn magnesu sztabkowego zbliża się do pętli przewodnika. Linie sił pola
magnetycznego skierowane są w dół. Wektor pola pętli kierujemy w górę. Zatem
ΦB < 0. W miarę zbliżania się magnesu do pętli rośnie pole magnetyczne, więc
pochodna
d𝐵(𝑡)
d𝑡
> 0. Ale
dΦB (𝑡)
d𝑡
= −𝐴
d𝐵(𝑡)
d𝑡
< 0, bo zwroty wektorów pola
powierzchni 𝑨 oraz 𝑩 są przeciwne. Wnioskujemy stąd, że 𝜀SEM = −
𝐴
d𝐵(𝑡)
d𝑡
dΦB (𝑡)
d𝑡
=
> 0. Ze względu na wypowiedziana wcześniej regułę Lenza prąd płynie w
kierunku (patrz rys.) wskazanym regułą prawej dłoni, której kciuk jest skierowany
w górę.
Inny sposób wyznaczenia kierunku płynącego prądu polega na
bezpośrednim wykorzystaniu reguły Lenza. Jeśli indukowany prąd ma
przeszkadzać przyczynie, która go wywołuje, to między magnesem i pętlą
powinniśmy obserwować siłę odpychania. Jest to możliwe o ile pętla będzie się
zachowywała jak magnes, którego biegun płn jest na górze. Jest to możliwe pod
warunkiem, że prąd płynie we wskazanym na rys. kierunku.
Ważna uwaga: Jeśli przyjąć, że kciuk prawej dłoni wskazuje kierunek od
bieguna płd do płn, tzn. u jego podstawy znajduje się biegun płd a przy końcu (tzn.
8
w okolicach paznokcia) umownie znajduje się biegun płn, to palce prawej dłoni
wskazują przepływ prądu indukowanego. Stosując tę umowę stwierdzamy, że
prąd płynie we wskazanym na rysunku kierunku. Przeciwny kierunek przepływu
prądu oznaczałby, że nad pętlą znajduje się biegun płd, a więc sztabka jest
przyciągana przez pętlę, co przeczy zasadzie przekory Lenza.
Odmienna sytuacja dotyczy przypadku oddalania się magnesu od pętli. Tym
razem magnes powinien być przyciągany przez pętlę. Jest to możliwe pod
warunkiem, że indukowany prąd zmieni kierunek. Wtedy górna część pętli działa
jak biegun płd.
SEM przewodnika poruszającego się w polu magnetycznym
(SEM wytwarzana przez siłę Lorentza)
Rozpatrzmy prostoliniowy przewodnik o długości 𝑙 poruszający się w polu
magnetycznym, jak pokazuje to rysunek
Ładunki dodatnie 𝑞 > 0 obecne w przewodniku doznają działania siły
Lorentza 𝑭B = 𝑞𝒗 × 𝑩, która popycha je w górę. Ładunki ujemne pozostają w
dolnej części przewodnika. W wyniku tego generowane jest pole elektryczne o
natężeniu 𝑬 wewnątrz przewodnika, które oddziaływuje siłą 𝑭 = 𝑞𝑬 na ładunki
dodatnie. W stanie równowagi 𝑞𝑣𝐵 = 𝑞𝐸, tj. 𝐸 = 𝑣𝐵. Implikuje to różnicę
potencjałów między końcami przewodnika równą 𝑉𝑎𝑏 = 𝑉𝑎 − 𝑉𝑏 = 𝜀rSEM = 𝐸𝑙 =
𝐵𝑙𝑣.
9
r
Tę siłę elektromotoryczną 𝜀SEM
nazywamy SEM ruchomego przewodnika.
r
W przypadku ogólnym 𝜀SEM
ruchomego przewodnika wynosi
r
𝜀SEM
= ∮(𝒗 × 𝑩) ∙ d𝒔,
gdzie d𝒔 jest różniczkowym elementem długości przewodnika.
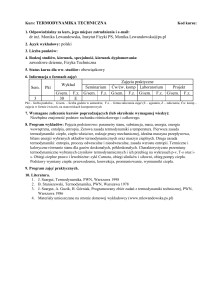
SEM prostokątnej ramki o rosnącej powierzchni
Rozpatrzmy teraz ramkę (zamknięty obwód elektryczny) zbudowana z
przewodnika umieszczoną w zewnętrznym polu magnetycznym, której jeden z
boków jest ruchomy; patrz rysunek
Pole magnetyczne jest skierowane za rysunek (kartkę) 𝑩 = −𝐵k̂. Pionowa
poprzeczka o długości 𝑙 ślizga się bez tarcia z prędkością 𝒗. Pozioma górna i dolna
szyna ramki są połączone opornikiem 𝑅.
Do ruchomej poprzeczki jest przyłożona siła zewnętrzna 𝑭ext , która
podtrzymuje jej ruch w prawo z prędkością 𝒗 = 𝑣î. Strumień pola magnetycznego
obejmowany ramką wynosi ΦB = 𝐵 ∙ 𝐴 = 𝐵𝑙𝑥(𝑡).
10
r
Z prawa Faradaya możemy policzyć 𝜀SEM
, tj. indukowaną SEM
r
𝜀SEM
=−
dΦB (𝑡)
d𝑡
=−
d[𝐵𝑙𝑥(𝑡 )]
d𝑡
= −𝐵𝑙
d𝑥(𝑡 )
d𝑡
= −𝐵𝑙𝑣.
Indukowany prąd elektryczny ma natężenie
𝐼=
|𝜀rSEM |
𝑅
=
𝐵𝑙𝑣
𝑅
.
Kierunek płynącego prądu jest przeciwny do ruchu wskazówek zegara, co
jest zgodne z regułą Lenza.
Siła magnetyczna działająca na przewodnik z prądem poruszający się w
prawo wynosi
𝐵2 𝑙2 𝑣
̂
̂
𝑭B = 𝐼(𝑙𝐣̂) × (−𝐵k) = −𝐼𝑙 𝐵i = − (
) ̂i
𝑅
i jest skierowana przeciwnie do siły zewnętrznej 𝑭ext oraz wektora
prędkości 𝒗. Zatem
𝐵2 𝑙2 𝑣
𝑭ext = −𝑭B = (
𝑅
) ̂i.
Moc tej siły jest równa
𝑃 = 𝑭ext 𝒗 = (
𝐵2 𝑙 2 𝑣
𝑅
)𝑣 =
11
(𝐵𝑙𝑣)2
𝑅
=
r
(𝜀SEM
)2
𝑅
= 𝐼 2 𝑅.
Strategia rozwiązywania zadań
z wykorzystaniem prawa Faradaya i reguły Lenza
W celu wyznaczenia indukowanej SEM oraz kierunku indukowanego prądu
postępujemy w sposób następujący:
1. Dla zamkniętej pętli leżącej w płaszczyźnie o polu powierzchni
𝐴 określamy wektor pola 𝑨. Kierujemy kciuk prawej dłoni
zgodnie ze zwrotem wektora 𝑨 . Wyznaczamy strumień pola
magnetycznego przez powierzchnię
𝑩 ∙ 𝑨 (pole 𝑩 jest jednorodne)
ΦB (𝑡) = {
.
∬𝑺 𝑩 ∙ 𝐝𝑨 (pole 𝑩 jest niejednorodne)
następnie znak ΦB (𝑡).
2. Wyznaczamy tempo zmian strumienia magnetycznego
Określamy znak
Określamy
dΦB (𝑡 )
d𝑡
.
dΦB (𝑡 )
d𝑡
.
3. Znak indukowanej SEM jest równy −
dΦB(𝑡)
.
d𝑡
4. Kierunek płynącego prądu indukowanego jest określony przez regułę
Lenza.
12
Niepotencjalność indukowanego pola elektrycznego
Różnica potencjałów między dwoma punktami 𝐴 𝑖 B w polu elektrycznym
wynosi
𝐵
∆𝑉 = 𝑉𝐵 − 𝑉𝐴 = − ∫𝐴 𝑬 ∙ d𝒔.
Przypomnijmy, że dla pola potencjalnego (zachowawczego)
∮ 𝑬 ∙ d𝒔 = 0.
Prawo Faradaya pokazuje, że zmienne pole magnetyczne indukuje pole
elektryczne wymuszające ruch nośników prądu w zamkniętej pętli! Dlatego
możemy zapisać
dΦB (𝑡)
.
d𝑡
Oznacza to, pole elektryczne wytwarzane w zjawisku
indukcji elektromagnetycznej nie jest potencjalne.
∮ 𝑬niepot. ∙ d𝒔 = 𝜀SEM = −
Należy odróżniać pole elektryczne zachowawcze od niezachowawczego. W
tym celu rozpatrzmy pole magnetyczne skierowane za kartkę papieru, które
wypełnia obszar objętości walca. Przekrój płaszczyzną prostopadłą przedstawia
rysunek
Załóżmy, że pole elektryczne rośnie, tj.
𝑑𝐵
𝑑𝑡
> 0. Spróbujmy wyznaczyć pole
elektryczne indukowane tym zmiennym w czasie polem magnetycznym.
13
Układ ma symetrię cylindryczną, więc pętlę Ampere’a wybieramy jako okrąg
o promieniu 𝑟. Symetria zagadnienia pozwala twierdzić, że wektor 𝑬niepot. w
każdym punkcie tej pętli ma tę samą długość. Zgodnie z regułą Lenza zwrot
wektora natężenia 𝑬niepot. indukowanego pola elektrycznego jest skierowany tak,
że wywoływany przez to pole przepływ ładunków powinien przeciwstawiać się
zmianom strumienia magnetycznego zewnętrznego pola.
Wektor pola 𝑨 jest skierowany w górę, pole magnetyczne rośnie
𝑑𝐵
𝑑𝑡
> 0,
więc strumień magnetyczny pola zewnętrznego jest ujemny i skierowany za
kartkę. Dlatego w celu przeciwdziałania zmianom tego magnetycznego pola
zewnętrznego indukowane pole elektryczne powinno cyrkulować w sposób
pokazany na rysunku, tj. przeciwnie do ruchu wskazówek zegara (patrz rysunek).
Można sobie wyobrażać, że prąd ten płynie po pętli kołowej przewodnika
obejmującego walec (patrz rysunek). Reguła prawej dłoni zastosowana do
naszego przypadku (gdy jej palce wskazują kierunek zgodny z kierunkiem 𝑬niepot. )
pokazuje zwrot indukowanego pola magnetycznego skierowanego w górę (kciuk
prawej dłoni jest skierowany w górę; w cewce jednozwojowej linie sił pola
magnetycznego biegną od bieguna płd. do płn., w naszym przypadku z za kartki;
oznacza to, że biegun płn. jest nad a płd. pod kartką).
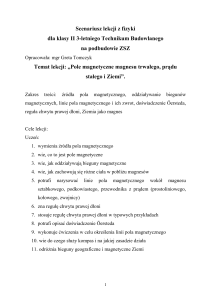
Teraz wyznaczymy wartość |𝑬niepot. | Rozpatrzmy najpierw przypadek 𝑟 <
𝑅
dΦB (𝑡)
d
d
d𝐵
= (𝑩 ∙ 𝑨) = − (𝐵 ∙ 𝐴) = − ( ) 𝜋𝑟 2 .
d𝑡
d𝑡
d𝑡
d𝑡
Ze wzoru podanego na poprzedniej stronie
∮ 𝑬niepot. ∙ d𝒔 = 𝐸niepot. ∙ ∮ d𝑠 = 𝐸niepot. ∙ (2𝜋𝑟) = −
d𝐵
𝑟 d𝐵
2
== ( ) 𝜋𝑟 → 𝐸niepot. = ( ).
d𝑡
2 d𝑡
14
dΦB (𝑡)
d𝑡
Podobnie postępujemy dla 𝑟 > 𝑅
dΦB (𝑡)
d𝐵
𝐸niepot. ∙ (2𝜋𝑟) = −
= ( ) 𝜋𝑅2 → 𝐸niepot.
d𝑡
d𝑡
𝑅2 d𝐵
=
( ).
2𝑟 d𝑡
Poniższy rysunek przedstawia wykres 𝐸niepot. (𝑟)
15
GENERATORY
Jednym z najpowszechniejszych zastosowań prawa Faradaya są generatory
prądu elektrycznego (wytwarzają prąd elektryczny konwertując energię
mechaniczna na elektryczną) i silniki elektryczne (zamieniają energię elektryczną
na mechaniczną).
Rys. po lewej stronie przedstawia generator/prądnice prądu elektrycznego.
Złożony on jest z 𝑁 zwojów/pętli przewodnika wirującego ze stałą prędkością
kątową 𝜔 w jednorodnym stałym polu magnetycznym. Strumień magnetyczny
obejmowany zwojami zmienia się w czasie, co indukuje SEM.
Z rys. po prawej stronie możemy wyznaczyć wartość strumienia
magnetycznego przenikającego przez pojedynczy zwój o polu powierzchni 𝐴
𝛷B = 𝑩 ∙ 𝑨 = 𝐵 ∙ 𝐴 cos(𝜔𝑡).
Szybkość/tempo jego zmian w czasie
dΦB (𝑡 )
d𝑡
= −𝐵 ∙ 𝐴 sin(𝜔𝑡).
Wobec tego
𝜀SEM
dΦB (𝑡)
= −𝑁
= 𝑁𝐵𝐴 sin(𝜔𝑡).
d𝑡
Po podłączeniu generatora do opornika o oporze 𝑅 popłynie w nim prąd o
natężeniu
|𝜀SEM | |𝑁𝐵𝐴 sin(𝜔𝑡)|
𝐼=
=
.
𝑅
𝑅
Prąd jest zmienny o amplitudzie
𝑁𝐵𝐴
𝑅
16
.
Moc chwilowa tego prądu jest równa
(𝑁𝐵𝐴𝜔)𝟐 𝟐
𝑃 = 𝐼|𝜀SEM | =
sin (𝜔𝑡).
𝑅
Moment siły działającej na pojedynczy zwój
𝜏 = 𝜇𝐵 sin(𝜔𝑡) = 𝐼𝐴𝐵 sin(𝜔𝑡).
Zatem mechaniczna moc dostarczana do pojedynczego zwoju
𝑃𝑚1 = 𝜏𝜔 = 𝜇1 𝐵𝜔 sin(𝜔𝑡) = 𝐼𝐴𝐵𝜔 sin(𝜔𝑡).
Magnetyczny moment dipolowy cewki generatora
𝜇𝑁 = 𝑁𝐼𝐴 = 𝑁𝐴
𝑁𝐵𝐴 sin(𝜔𝑡)
𝑅
=
𝑁2 𝐴2 𝐵 sin(𝜔𝑡)
𝑅
,
co pozwala nam wyznaczyć moc mechaniczną dostarczaną do generatora
𝟐
(
)
𝑁𝐵𝐴𝜔
𝑃𝑚𝑁 = 𝑃𝑚 = 𝜇𝑁 𝐵𝜔 sin(𝜔𝑡) =
sin𝟐 (𝜔𝑡) = 𝑃,
𝑅
która jest równa mocy prądu elektrycznego.
17
Prądy wirowe
Jeśli w polu magnetycznym zamiast przewodnika będziemy przemieszczali
przewodnik masywny (np. blok miedzi, patrz rysunek), to w jego wnętrzu zostanie
wyidukowany cyrkulujący prądy zwany prądem wirowym.
Prądy wirowe indukują pola magnetyczne, które przeciwstawiają się ruchowi bryły
metalu, co ilustruje rysunek.
|𝜀
|
W bryle przewodnika wydziela się ciepło Lenza o mocy równej SEM . W celu
𝑅
zmniejszenia strat skleja się płaskie warstwy przewodników za pomocą
materiałów dielektrycznych lub wycina się warstwy materiału z litego
przewodnika; patrz rysunki.
Prądy
wirowe mają zastosowanie do wygaszania drgań i hamowania pojazdów
spalinowych, pociągów i tramwajów.
18
Podsumowanie
1. Strumień magnetyczny przenikający przez powierzchnię 𝑺 jest
równy 𝜱𝐁 = ∬𝑺 𝑩 ∙ 𝐝𝑨.
2. Prawo Faradaya mówi, że indukowana SEM w solenoidzie jest
równa 𝜺𝐒𝐄𝐌 = −𝑵
3. Kierunek
𝐝𝜱𝐁 (𝒕)
𝐝𝒕
indukowanego
.
prądu
określa
reguła
Lenza:
Indukowany prąd elektryczny generuje pole magnetyczne
przeciwdziała
zmianie
strumienia
magnetycznego,
który
wyindukował ten prąd.
4. SEM przewodnika poruszającego się w polu magnetycznym (SEM
wytwarzana przez siłę Lorentza) wynosi
r
𝜀SEM
= ∮(𝒗 × 𝑩) ∙ d𝒔.
5. Indukowana SEM w stacjonarnym przewodniku odpowiada
niepotencjalnemu polu elektrycznemu
∮ 𝑬niepot. ∙ d𝒔 = 𝜀SEM = −
19
dΦB (𝑡)
.
d𝑡
Indukowana SEM i układ odniesienia
SEM indukowana w przewodniku poruszającym się w polu magnetycznym
wynosi
r
𝜀SEM
= ∮(𝒗 × 𝑩) ∙ d𝒔.
Natomiast SEM stacjonarnej pętli umieszczonej w zewnętrznym zmiennym
polu magnetycznym jest równa
𝜀SEM = ∮ 𝑬niepot. ∙ d𝒔.
Stan spoczynku (brak ruchu) lub ruchu zależy od układu odniesienia.
Rozpatrzmy sytuację, w której magnes sztabkowy zbliża się do zamkniętej pętli
przewodnika. Nieruchomy obserwator O związany ze spoczywającą pętlą
obserwuje magnes zbliżający się do pętli. Indukowane w pętli pole elektryczne
powoduje w niej ruch ładunków elektrycznych. Siła ta jest równa
𝑞𝑬niepot. .
𝑭e =
Z punktu widzenia obserwatora O ładunki spoczywają, więc nie
działa na nie siła Lorentza.
Z drugiej strony obserwator O’ związany z magnesem widzi zbliżające się
do niego ładunki elektryczne. Więc działa na nie siła Lorentza
𝑭B = 𝑞𝒗 × 𝑩,
r
która powoduje pojawienie się 𝜀SEM = ∮(𝒗 × 𝑩) ∙ d𝒔. Ponieważ jedno i to
samo zjawisko jest obserwowane z dwóch różnych układów odniesienia, to
𝑭e = 𝑞𝑬niepot. = 𝑭B = 𝑞𝒗 × 𝑩,
co implikuje kolejną równość
𝑬niepot. = 𝒗 × 𝑩.
20
Indukcyjność i energia pola magnetycznego
Załóżmy, że dwie cewki są położone blisko siebie, jak na rysunku.
Pierwsza cewka ma liczbę zwojów 𝑁1 płynie w niej prąd o natężeniu 𝐼1 a
pole magnetyczne ma wektor indukcji 𝑩1 . Ponieważ cewki są blisko siebie, to pole
magnetyczne cewki 1 wnika do cewki 2. Oznaczmy przez
Φ2←1 = Φ21
2. Jeśli prąd 𝐼1
strumień pola magnetycznego cewki 1 przenikającego cewkę
będzie zmieniał się w czasie, to wyidukuje się w cewce 2 SEM o wartości
𝜀21 = −𝑁2
dΦ2←1
d𝑡
= −𝑁2
dΦ21
d𝑡
d
= − d𝑡 ∬cewka 1 𝑩1 ∙ d𝑨2 .
Tempo/szybkość zmiany w czasie strumienia magnetycznego
jest proporcjonalna do szybkości zamiany prądu w cewce 1, tj.
𝑁2
dΦ21
d𝐼1
d𝐼1
= 𝑀2←1
= 𝑀21
,
d𝑡
d𝑡
d𝑡
gdzie współczynnik indukcyjności cewki 1 względem 2 jest równy
𝑀2←1 = 𝑀21 =
21
𝑁2 Φ2←1 𝑁2 Φ21
=
.
𝐼1
𝐼1
Φ21 cewki 2
Równość tę otrzymujemy z przedostatniego wzoru po przepisaniu go w
następującej postaci
d
d𝑡
(𝑁2 Φ21 ) =
d
d𝑡
(𝑀2←1 𝐼1 ) =
d
d𝑡
(𝑀21 𝐼1 ).
Pokażemy dalej, że 𝑀21 zależy od charakterystyk geometrycznych cewek.
W układzie SI jednostką współczynnika indukcyjności jest henr
1 henr = 1 H = 1 Tm2/A.
W pełni analogiczny sposób możemy analizować sytuację fizyczną
przedstawioną na rys.
Teraz w cewce 2 o liczbie zwojów 𝑁1 płynie prąd o natężeniu 𝐼2 a pole
magnetyczne ma wektor indukcji 𝑩2 . Ponieważ cewki są blisko siebie, to pole
magnetyczne cewki 2 wnika do cewki 1. Oznaczmy przez
Φ1←2 = Φ12
1. Jeśli prąd 𝐼2
strumień pola magnetycznego cewki 2 przenikającego cewkę
będzie zmieniał się w czasie, to wyidukuje się w cewce 1 SEM o wartości
𝜀12 = −𝑁1
dΦ1←2
d𝑡
= −𝑁12
dΦ12
d𝑡
d
= − d𝑡 ∬cewka 2 𝑩2 ∙ d𝑨1 .
Tempo/szybkość zmiany w czasie strumienia magnetycznego
jest proporcjonalna do szybkości zamiany prądu w cewce 2, tj.
dΦ12
d𝐼2
d𝐼2
𝑁1
= 𝑀1←2
= 𝑀12
,
d𝑡
d𝑡
d𝑡
22
Φ12 cewki 1
gdzie współczynnik indukcyjności cewki 2 względem 1 jest równy
𝑀1←2 = 𝑀12 =
𝑁1 Φ2←1 𝑁1 Φ21
=
.
𝐼1
𝐼1
Wartość 𝑀12 zależy od charakterystyk geometrycznych cewek.
Ostatnią równość otrzymujemy zauważając, że
𝑁1
dΦ12
d
d
d
= (𝑁1 Φ12 ) = (𝑀1←2 𝐼1 ) = (𝑀12 𝐼1 )
d𝑡
d𝑡
d𝑡
d𝑡
Ze względu na symetryczność obu rozpatrzonych zagadnień zachodzi
związek
𝑀2←1 = 𝑀21 = 𝑀1←2 = 𝑀12 = 𝑀.
23
Przykład.
Rozpatrzmy dwie pętle współśrodkowe z prądami, co ilustruje rys.
Ile wynosi współczynnik indukcji wzajemnej, jeśli 𝑅1 ≫ 𝑅2 ?
𝜇0 𝐼1
Wartość wektora indukcji w środku większej pętli jest równa𝐵1 =
.
2𝑅1
Uwzględniając warunek 𝑅1 ≫ 𝑅2 możemy wyznaczyć strumień przenikający przez
wewnętrzną pętle
Φ12
𝜇0 𝐼1
𝜇0 𝐼1 𝜋𝑅22
2
= 𝐵1 𝐴1 = (
) 𝜋(𝑅2 ) =
.
2𝑅1
2𝑅1
Wobec tego
𝑀2←1 = 𝑀21
Φ2←1 Φ21 𝜋𝜇0 𝑅22
=
=
=
.
𝐼1
𝐼1
2𝑅1
Wyznaczona wartość współczynnika indukcyjności wzajemnej zależy tylko
od charakterystyk geometrycznych pętli.
24
Samoindukcyjność
Ponownie rozważać będziemy cewkę o liczbie zwojów 𝑁 , w której płynie
prąd o natężeniu 𝐼 w kierunku przeciwnym do ruchu wskazówek zegara.
Załóżmy, że wartość natężenia zmienia się w czasie. Wtedy w zgodzie z
prawem Faradaya w cewce jest indukowana SEM, tj. prąd przeciwstawiający się
prądowi pierwotnemu 𝐼.
Indukowany prąd będzie płynął zgodnie z ruchem wskazówek zegara, gdy
d𝐼
d𝑡
> 0; będzie płynął niezgodnie z ruchem wskazówek zegara, gdy
d𝐼
d𝑡
< 0.
Opisane tutaj zjawisko to nosi nazwę samoindukcji. Prąd indukowany w ten
sposób nazywamy prądem samoindukcji, a SEM siłą elektromotoryczną
samoindukcji i oznaczamy symbolem 𝜀𝐿 .
Spróbujmy policzyć współczynnik samoindukcji dowolnego przewodnika z
prądem. Z prawa Faradaya otrzymujemy
𝜀𝐿 = −𝑁
dΦ𝐵
d
d
𝜀𝐿 = −𝐿
d𝐼
d
= (𝐿𝐼 ).
d𝑡 d𝑡
d𝑡
= −𝑁 d𝑡 ∬ 𝑩 ∙ 𝑨 = d𝑡 (𝑁 ∬ 𝑩 ∙ 𝑨),
co można zapisać w postaci
Prowadzi to do związku
𝐿=
𝑁Φ𝐵
.
𝐼
25
Samoindukcyjność solenoidu
Policzmy wartość 𝐿 cewki o 𝑁 zwojach, długości 𝑙 z prądem 𝐼.
Pole magnetyczne wewnątrz solenoidu
𝑩=
𝑁
𝜇0 𝑁𝐼
̂ = 𝜇0 𝑛𝐼𝐤
̂,
𝐤
𝑙
gdzie 𝑛 = .
𝑙
Strumień magnetyczny przenikający przez cewkę
2
2
Φ𝐵 = 𝐵𝐴 = 𝜇0 𝑛𝐼 (𝜋𝑅 ) = 𝜇0 𝜋𝑛𝐼𝑅 .
Zatem współczynnik samoindukcji cewki
𝑁
2
𝑁Φ𝐵 𝑁𝜇0 𝜋𝑛𝐼𝑅2 𝑁𝜇0 𝜋 ( 𝑙 ) 𝐼𝑅
𝑁 2 𝜇0 𝜋𝐼𝑅2
𝐿=
=
=
=
= 𝑛2 𝜇0 𝜋𝐼𝑅2 𝑙.
𝐼
𝐼
𝐼
𝑙
Ponownie widzimy, że
także współczynnik samoindukcji zależy od
charakterystyk geometrycznych i jest niezależny od prądu 𝐼.
26
Współczynnik indukcji wzajemnej cewek
Długa cewka o dł. 𝑙, polu powierzchni poprzecznej 𝐴, zawierająca 𝑁1 zwojów jest
otoczona inną zewnętrzną cewką (patrz rys.) z 𝑁2 zwojami. Policzymy wartość 𝑀
dla tego układu zakładając, że strumień magnetyczny cewki wewnętrznej przenika
zwoje cewki zewnętrznej.
Strumień magnetyczny przenikający przez jeden zwój cewki zewnętrznej
wynosi
Φ21 = 𝐵𝐴 =
𝜇0 𝑁1 𝐼1
𝐴.
𝑙
Zatem współczynnik indukcji wzajemnej cewek
𝑁2 Φ21 𝜇0 𝑁2 𝑁1
𝑀=
=
𝐴.
𝐼1
𝑙
Ponownie widzimy, że
także współczynnik samoindukcji zależy od
charakterystyk geometrycznych i jest niezależny od prądu 𝐼.
Zauważmy, że współczynniki samoindukcji cewek wynoszą
𝐿1 =
𝑁1 Φ11
𝐼1
=
𝜇0 𝑁12 𝐴
𝑙
,
𝑁2 Φ22 𝜇0 𝑁22 𝐴
𝐿2 =
=
.
𝐼2
𝑙
Zatem
𝑀 = √𝐿1 𝐿2 .
W
ogólnym
przypadku
𝑀 = 𝑘√𝐿1 𝐿2 ,
współczynnikiem sprzężenia między cewkami.
27
gdzie
0≤𝑘≤1
jest
Energia pola magnetycznego
Cewka umieszczona w obwodzie elektrycznym przeciwstawia się jakimkolwiek
zmianom prądu płynącego przez nią. Wynika stąd, że aby prąd popłynął prze
cewkę trzeba pokonać „jej opory”, tj. wykonać nad nią pracę. Z twierdzenia o
pracy i energii wnosimy, że w cewce jest magazynowana energia. Tym razem jest
to energia pola magnetycznego.
Postaramy się wyznaczyć wartość tej energii. Moc 𝑃𝐿 zewnętrznego źródła
prądu o SEM równej 𝜀zew. podłączonego do cewki wynosi
𝑃𝐿 =
d𝑊zew.
= 𝐼𝜀zew.
dt
Jeśli cewka tylko jest podłączona do zewnętrznego źródła, to
𝑃𝐿 =
Zauważmy, że jeśli
d𝐼
d𝑡
d𝑊zew.
dt
d𝐼
= −𝐼𝜀L = +𝐼𝐿 .
d𝑡
> 0, to 𝑃𝐿 > 0, co oznacza, że zewnętrzna siła
wykonuje pracę nad cewką, do której jest transferowana/przekazywana energia.
Wtedy energia wewnętrzna cewki 𝑈𝐵 rośnie.
Jeśli
d𝐼
d𝑡
< 0, to 𝑃𝐿 < 0, co oznacza, że cewka oddaje energię otoczeniu, a
energia wewnętrzna cewki 𝑈𝐵 maleje.
Całkowita praca wykonana przez zewnętrzną SEM w celu zwiększenia prądu w
cewce od zera do wartości 𝐼 jest równa
𝐼
1
𝑊zew. = ∫ d𝑊zew. = ∫0 𝐿𝐼 ′ d𝐼 ′ = 2 𝐿𝐼 2 .
Uzasadnienie zastosowanego sposobu obliczania pracy. Ze wzoru 𝑃𝐿 =
d𝑊zew.
dt
= +𝐼𝐿
d𝐼
d𝑡
wynika, że 𝑃𝐿 dt = d𝑊zew. = +𝐼𝐿d𝐼.
Zatem wartość magnetycznej energii zgromadzonej w cewce wynosi
1
𝑊zew. = 𝑈𝐵 = 2 𝐿𝐼 2 .
Cewka odgrywa w obwodach elektrycznych podobną rolę do kondensatora,
którym zgromadzona energia pola elektrycznego wynosi 𝑈𝐸 =
1 𝑄2
2 𝐶
1
= 𝐶𝑉 2 .
2
Zauważmy istotną różnicę między opornikiem i cewką. Energia elektryczna
prądu płynącego w oporniku jest „tracona” bezpowrotnie, tj. wydziela się w nim
pod postacią energii cieplnej. W cewce energia jest do niej dostarczana i w niej
magazynowana o ile
d𝐼
d𝑡
> 0. Energia ta jest w cewce magazynowana; nie jest
więc tracona. Może być oddana otoczeniu, gdy
28
d𝐼
d𝑡
< 0.
Energia pola magnetycznego cewki(solenoidu)
Cewka o długości 𝑙, promieniu 𝑅 zawiera 𝑁 zwojów. Płynie przez nią prąd 𝐼. Ile
energii magnetycznej jest zgromadzonej w cewce?
1
Przypomnijmy, że 𝑈𝐵 = 𝐿𝐼 2 oraz 𝐿 = 𝑛2 𝜇0 𝜋𝐼𝑅 2 𝑙 więc
2
1
1
𝑈𝐵 = 𝐿𝐼2 = 𝑛2 𝜇0 𝜋𝐼2 𝑅 2 𝑙.
2
2
Ponieważ 𝐵 = 𝜇0 𝑛𝐼, to
(𝜇0 𝑛𝐼)2
1
𝐵2
2
2
2
(𝜇0 𝑛𝐼) (𝜋𝑅 𝑙) =
(𝜋𝑅 𝑙) =
(𝜋𝑅 2 𝑙).
𝑈𝐵 =
2𝜇0
2𝜇0
2𝜇0
Stąd gęstość energii pola magnetycznego w objętości solenoidu
𝑢𝐵 =
𝑈𝐵
𝑉objęt. cewki
=
𝐵2
(𝜋𝑅 2 𝑙)
2𝜇0
𝜋𝑅 2 𝑙
=
𝐵2
2𝜇0
.
Przypomnijmy, że gęstość energii pola elektrycznego
1
𝑢𝐸 = 2 𝜀0 𝐸 2 .
Przegląd animacji
1. Kreacja
i
anihilacja
pola
magnetycznego
–
na
stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/SolenoidUp/SolenoidUp.htm
dostępna jest animacja ilustrująca powstawanie/kreowanie pola
magnetycznego przez 5 zwojów cewki, w których płyną dodatnie ładunki
niezgodnie z ruchem wskazówek zegara. Ruch tych ładunków jest widoczny
29
w uzwojeniach cewki. Pole magnetyczne w objętości obejmowanej pętlami
oraz na zewnątrz rośnie w chwilach czasu, gdy rośnie prąd elektryczny
płynący w uzwojeniach. Linie pola magnetycznego wewnątrz uzwojeń są
prawie równoległe do osi 5-zwojowej cewki. Podczas wzrostu natężenia
prądu w uzwojeniach indukowana jest SEM samoindukcji przeciwstawiająca
się zewnętrznym źródłom prądu wymuszających ruch dodatnich ładunków
prądu. SEM samoindukcji jest skierowana przeciwnie do zewnętrznej SEM.
Zwraca uwagę emitowanie, w przestrzeń otaczająca układ, pola
magnetycznego i jego energii w tych odcinkach czasu, w których rośnie
prąd, tj. gdy ładunki dodatnie są przyspieszane (układ działa wówczas jak
antena nadawcza). Od chwili, gdy prądy płynące w uzwojeniach nie rosną,
pole magnetyczne stabilizuje się; linie pola magnetycznego nie zmieniają
swoich kształtów.
2. Kreacja
i
anihilacja
pola
magnetycznego
–
na
stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/SolenoidDown/SolenoidDown.htm
dostępna jest animacja ilustrująca anihilowanie/znikanie pola
magnetycznego między 5 zwojami cewki, w których płyną dodatnie ładunki
niezgodnie z ruchem wskazówek zegara. Ruch tych ładunków, widoczny w
uzwojeniach cewki, jest stopniowo spowalniany. Pole magnetyczne w
objętości obejmowanej pętlami oraz na zewnątrz powoli maleje. Podczas
zmniejszania natężenia prądu w uzwojeniach indukowana jest SEM
samoindukcji przeciwstawiająca się zewnętrznym źródłom prądu
wymuszających ruch dodatnich ładunków prądu. Tym razem SEM
samoindukcji dąży do podtrzymania prądu i jest skierowana zgodnie z
zewnętrzną SEM. Zwraca uwagę emitowanie, w przestrzeń otaczająca
układ, pola magnetycznego i jego energii w tych odcinkach czasu, w których
30
rośnie prąd, tj. gdy ładunki dodatnie są przyspieszane (układ działa
wówczas jak antena nadawcza). Od chwili, gdy prądy płynące w
uzwojeniach nie rosną, pole magnetyczne stabilizuje się; linie pola
magnetycznego nie zmieniają swoich kształtów.
3. Magnes sztabkowy i idealna pętla przewodnika (opór zerowy) – na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingRing/FallingRing.htm
dostępna jest animacja ilustrująca działanie prawa Faradaya. Lekka pętla
przewodnika z oporem równym zeru porusza się ruchem drgającym nad
osią magnesu sztabkowego. Indukowana SEM powoduje wirowy ruch
ładunków elektrycznych w pętli (prądy wirowe), który wytwarza pole
magnetyczne skierowane przeciwnie do pola magnesu sztabkowego. Pętla i
magnes odpychają się. W rezultacie spadek pionowy pętli jest zaburzany i
hamowany. Następnie przewodnik wznosi się do położenia początkowego.
Pętla może nawet lewitować w polu magnetycznym i grawitacyjnym. Film
ten pokazuje konwersję energii grawitacyjnej w energię kinetyczną oraz
energię zgromadzoną w polu magnetycznym. Zbliżanie się do siebie linii
pola magnetycznego, tj. ich kompresowanie się (zagęszczanie się),
obserwowane w obszarze między pętlą i magnesem stałym wskazuje na
przekazywania oddziaływań i energii między pętlą i magnesem. W
najniższym położeniu potencjalna energia grawitacyjna i energia kinetyczna
przyjmują najmniejsze wartości; początkowa wartość potencjalnej energii
grawitacyjnej (ma ją pętla w najwyższym, tj. początkowym położeniu) jest
zgromadzona w energii pola magnetycznego, do którego została
przetransferowana dzięki oddziaływaniom magnetycznym. Natomiast w
najwyższym położeniu potencjalna energia grawitacyjna jest największa
31
(liczona względem punktu zatrzymania się pętli spadającej w dół) a energia
kinetyczna przyjmuje ponownie najmniejszą, tj. zerową wartość. Przy czym
pętla odzyskała początkową energię grawitacyjną w wyniku oddziaływań
magnetycznych, tj. energia pola magnetycznego została przekonwertowana
na grawitacyjną energię potencjalną.
Na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingRingEquator/FallingRingEquator.htm
znajduje się animacja przedstawiająca lekką pętlę o zerowym oporze, która
wykonuje ruch drgający pod magnesem trwałym.
Na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingRingSuperAboveOut/FallingRingSuperAboveOut.htm
znajduje się animacja przedstawiająca masywną pętlę o zerowym oporze,
która porusza się na osi magnesu trwałego.
32
4. Magnes sztabkowy i pętla przewodnika (opór niezerowy) – na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingRingResistive/FallingRingRes
dostępna jest animacja ilustrująca także działanie prawa Faradaya.
Pętla przewodnika z oporem niezerowym porusza się, jak w poprzednim
przypadku, nad osią magnesu sztabkowego. Indukowana SEM wywoduje w
pętli prądy wirowe, które wytwarza pole magnetyczne skierowane
przeciwnie do pola magnesu sztabkowego. Pętla i magnes odpychają się. W
rezultacie spadek pionowy pętli jest zaburzany i hamowany. Ze względu na
dyssypację/rozpraszanie energii pętla balansuje nad magnesem w dół i w
górę po czym mija magnes i opada ostatecznie w dół pod wpływem siły
grawitacyjnej. Tym razem przy mijaniu magnesu prądy wirowe zmieniają
kierunek i będąc poniżej magnesu pętla jest przyciągana przez magnes.
Na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingRingEquator/FallingRingEquator.htm
znajduje się animacja przedstawiająca podwieszoną pod stałym magnesem
pętlę, która wykonuje ruch drgający.
33
Natomiast na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingMagnetEquator/FallingMagnetEquator.htm
znajdują się animacje przedstawiające podwieszony pod pętlą stały magnes,
który wykonuje ruch drgający.
34
5. Lewitujący magnes trwały – animacje ze strony
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingMagnetSuperAbove/FallingMagnetSuperAbove.htm
35
6. Spadający magnes przez pętlę z zerowym oporem – animacje dostępne na
stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingMagnetResistive/FallingMagnetResistive.htm
36
7. Spadający magnes przez pętlę z niezerowym oporem – animacje dostępne
na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/FallingMagnetResistive/FallingMagnetResistive.htm
37
8. Spadająca cewka w polu magnesu sztabkowego – applet na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/fallingcoilapp/fallingcoilapp.htm
9. Prawo Faradaya cześć I – applet na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/faradayapp/faradayapp.htm
38
10.Prawo Faradaya cześć II – applet na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/faradayapp02/faradayapp02.htm
11. Spadający magnes przez niemagnetyczna pętlę z niezerowym oporem –
applet dostępny na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/fallingmagnetapp/fallingmagnetapp.htm
39
12.Magnes lewitujący nad nadprzewodnikiem – film dostępny na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/superconductor/superconductor.htm
40
Obwody elektryczne w zewnętrznych polach magnetycznych
Umieszczenie obwodu elektrycznego w zewnętrznym zmiennym w czasie
polu magnetycznym zmienia zasadniczo obraz fizyczny. W obwodzie ze źródłem
stałego pola magnetycznego cyrkulacja natężenia pola elektrycznego po krzywej
zamkniętej jest równa zeru. W zmiennym polu magnetycznym tak już nie jest,
ponieważ indukowane pole elektryczne nie jest potencjalne
∮ 𝑬niepot. ∙ d𝒔 = 𝜀SEM = −
dΦB (𝑡)
.
d𝑡
Jak należy analizować takie obwody elektryczne?
Rozpatrzmy układ elektryczny z poniższego rysunku.
Jak zależy od czasu prąd po włączeniu zasilania? W celu zbadania tego
zagadnienia zastosujemy prawo Faradaya do powierzchni objętej przewodnikami.
Wybieramy zwrot wektora pola 𝑨 przed kartkę a obwód będziemy obchodzić
przeciwnie do ruchu wskazówek zegara. Spadek napięcia na zamkniętym
obwodzie jest równy
∮ 𝑬 ∙ d𝒔 = −𝜀 + 𝐼𝑅,
ponieważ baterię mijamy/obchodzimy od minusa do plusa (wtedy jej SEM
bierzemy do powyższego równania ze znakiem ujemnym). Policzymy teraz
strumień pola magnetycznego obejmowanego naszym układem. Zaniedbamy pole
powierzchni obwodu po prawej stronie. Skupimy się na strumieniu przenikającym
41
jednej zwój cewki widoczny po prawej stronie obwodu. Pokazany kierunek
przepływu prądu implikuje, że wektor indukcji pola 𝑩, generowanego przez prąd
płynący w obwodzie (nie jest to więc zewnętrzne pole magnetyczne), jest
skierowany przed kartkę. Zatem iloczyn skalarny 𝑩d𝑨 > 0. Strumień pola jest
proporcjonalny do natężenia prądu 𝐼 , tj. Φ𝐵 = 𝐿𝐼, gdzie 𝐿 -współczynnik
samoindukcji naszego obwodu. Tak więc
∮ 𝑬niepot. ∙ d𝒔 = − 𝜀 + 𝐼𝑅 = −
dΦ𝐵
d𝑡
d𝐼
= −𝐿 d𝑡 .
Zatem „równanie ruchu” przyjmie postać
Δ𝑉 = 𝜀 − 𝐼𝑅 − 𝐿
d𝐼
= 0.
d𝑡
Kolejna tabela określa regułę znaków dla obwodu z indukcyjnością.
Polaryzacja indukowanej SEM spełnia prawo przekory Lenza. Jeśli szybkość/tempo
zmiany natężenia prądu jest dodatnie (prąd rośnie), jak to pokazuje lewa część
tabeli, to indukowana SEM generuje prąd płynący w przeciwnym kierunku niż
prąd w obwodzie 𝐼. Tak więc cewka może być zastąpiona źródłem prądu o sile
d𝐼
d𝐼
elektromotorycznej równej |𝜀𝐿 | = 𝐿 | | = +𝐿
i o biegunach/zaciskach,
d𝑡
d𝑡
których położenie wskazuje prawa część tabeli.
Jeśli szybkość/tempo zmiany natężenia prądu jest ujemne (prąd maleje), jak
to pokazuje prawa część tabeli, to indukowana SEM generuje prąd płynący w tym
samym kierunku co prąd w obwodzie 𝐼. Tak więc cewka może być zastąpiona
d𝐼
d𝐼
źródłem prądu o sile elektromotorycznej równej |𝜀𝐿 | = 𝐿 | | = +𝐿
i o
d𝑡
d𝑡
biegunach/zaciskach, których położenie wskazuje lewa część tabeli.
42
Tak więc niezależnie od tego, czy
d𝐼
d𝑡
> 0, czy też
d𝐼
d𝑡
< 0, to różnica
potencjałów przy przejściu od 𝑎 do 𝑏 jest zawsze równa
d𝐼
𝑉𝑏 − 𝑉𝑎 = −𝐿 d𝑡.
Zmodyfikowana reguła Kirchhoffa dla obwodów zawierających indukcyjność
Jeśli element indukcyjny obwodu jest obchodzony w kierunku
zgodnym z przepływem prądu w oczku obwodu, to zmiana
d𝑰
napięcia/”spadek” potencjału na nim jest równa −𝑳 .
d𝒕
Jeśli element indukcyjny obwodu jest obchodzony w kierunku
przeciwnym do przepływu prądu w oczku obwodu, to zmiana
d𝑰
napięcia/”spadek” potencjału na nim jest równa +𝑳 .
d𝒕
Obwód RL
Rozważmy obwód pokazany na rysunku.
Po zamknięciu klucz S równanie ruchu przyjmie postać (zgodnie ze
zmodyfikowanym prawem Kirchhoffa)
𝜖 − 𝐼𝑅 − |𝜀𝐿 | = 0 = 𝜖 − 𝐼𝑅 − 𝐿
d𝐼
.
d𝑡
Po rozdzieleniu zmiennych otrzymujemy równanie różniczkowe
43
d𝐼
d𝑡
=
−
.
𝐿⁄
𝐼 − 𝜀⁄𝑅
𝑅
Po scałkowaniu,
otrzymujemy
uwzględnieniu
warunku
początkowego
𝐼(𝑡 = 0) = 0,
𝜀
𝐼 (𝑡) = [1 − 𝑒 −𝑡/𝜏 ],
𝑅
𝐿
gdzie stała czasowa 𝜏 = .
𝑅
Zależność prądu od czasu ilustruje poniższy rysunek.
d𝐼
Kolejny wykres pokazuje zależność od czasu |𝜀𝐿 | = |−𝐿 | = 𝜀 𝑒−𝑡/𝜏 .
d𝑡
44
Zajmiemy się jeszcze obwodem przedstawionym na kolejnym rysunku
Tym razem rozważamy przypadek, w którym początkowo płynął prąd o natężeniu
𝜀
𝑅
, klucz 𝑆1 był długo otwarty, a klucz 𝑆2 był otwarty; patrz rys. po stronie lewej.
Następnie otwieramy 𝑆1 i zamykamy klucz 𝑆2 ; patrz rysunek po stronie
prawej. Zastosujemy zmodyfikowane prawo Kirchhoffa
|𝜀𝐿 | − 𝐼𝑅 = −𝐿
d𝐼
d𝑡
− 𝐼𝑅 = 0,
co jest równoważne równaniu
d𝐼
𝐼
=−
d𝑡
𝐿/𝑅
,
którego rozwiązanie ma postać
𝐼 (𝑡) =
𝜀 −𝑡/𝜏
𝑒
,
𝑅
a ilustracją wykres
45
Obwód LC
Rozpatrzymy jeszcze obwód z rysunku
Po zamknięciu klucza 𝑆 kondensator zaczyna rozładowywać się. Ze względu
na brak oporu, energia pola elektrycznego kondensatora ulega konwersji
w energię pola magnetycznego w cewce. Proces ten jest odwracalny, tj. energia
pola magnetycznego ładuje kondensator itd. Mówimy, że mamy do czynienia
z drganiami elektromagnetycznymi w obwodzie LC.
Energia zgromadzona w rozpatrywanym układzie jest stała i równa
1
2
1 𝑄2
𝑈 = 𝑈𝐵 + 𝑈𝐸 = 2 𝐿𝐼 + 2
𝐶
.
Pochodna energii całkowitej względem czasu jest równa zeru, tj.
d𝑈
d
d 1 2 1 𝑄2
d𝐼 𝑄 d𝑄
(
)
=
𝑈 + 𝑈𝐸 = ( 𝐿𝐼 +
) = 𝐿𝐼 +
= 0,
d𝑡 d𝑡 𝐵
d𝑡 2
2 𝐶
d𝑡 𝐶 d𝑡
które jest równoważne równaniu różniczkowemu (przypomnijmy, że 𝐼 =
𝐿𝐼
d𝑄
)
d𝑡
d𝑄
2
)
d𝑡 + 𝑄 𝐼 = 0 → 𝐿 𝑑 𝑄 (𝑡) + 𝑄 (𝑡) = 0.
d𝑡
𝐶
d𝑡 2
𝐶
d(
Rozwiązaniem ostatniego równania jest funkcja
𝑄(𝑡) = 𝑄0 cos(𝜔0 𝑡 + 𝜑),
gdzie 𝑄0 jest amplitudą ładunku, a 𝜑 fazą początkową drgań, 𝜔0
46
=
1
√𝐿𝐶
.
Prąd płynący przez cewkę
d𝑄
𝐼(𝑡) = −
= 𝜔0 𝑄0 sin(𝜔0 𝑡 + 𝜑) = 𝐼0 sin(𝜔0 𝑡 + 𝜑).
d𝑡
Z warunków początkowych 𝑄(𝑡 = 0) = 𝑄0 i 𝐼(𝑡 = 0) = 0 wyznaczamy
𝜑=
0.
Ostatecznie otrzymujemy
𝑄 (𝑡) = 𝑄0 cos(𝜔0 𝑡)
i
𝐼(𝑡) = 𝐼0 sin(𝜔0 𝑡),
co przedstawia kolejny wykres
Przeanalizujemy jeszcze relacje energetyczne w tym obwodzie. Energia pola
elektrycznego
1 𝑄 2 (𝑡 )
𝑈𝐸 = 2
𝐶
𝑄02
= (2𝐶 ) cos 2 (𝜔0 𝑡).
i
1
1
1
𝑈𝐵 = 2 𝐿𝐼 2 (𝑡) = 2 𝐿𝐼02 sin2 (𝜔0 𝑡) = 2 𝐿(𝜔0 𝑄0 )2 sin2 (𝜔0 𝑡) =
𝑄02
(2𝐶 ) sin2 (𝜔0 𝑡).
47
Sumaryczna energia w obwodzie LC
1 2 1 𝑄2
𝑈 = 𝑈𝐵 + 𝑈𝐸 = 𝐿𝐼 +
2
2 𝐶
2
2
𝑄0
𝑄
0
= ( ) [sin2 (𝜔0 𝑡) + cos 2 (𝜔0 𝑡)] = ( ) = const.
2𝐶
2𝐶
Poniższy wykres przedstawia zależność od czasu składowych energii
Analogią mechaniczną rozpatrzonego obwodu jest układ przedstawiony na
rysunku
Energia mechaniczna tego układu
1
1
2
2
𝑈 = en. kinetyczna+en. potencjalna sprężystości= 𝑚𝑣 2 + 𝑘𝑥 2 .
Podobnie jak poprzednio
d𝑈
d
d 1 2 1 2
d𝑣
d𝑥
(
)
=
𝑈 + 𝑈𝑃 = ( 𝑚𝑣 + 𝑘𝑥 ) = 𝑚𝑣
+ 𝑘𝑥
d𝑡 d𝑡 𝐾
d𝑡 2
2
d𝑡
d𝑡
= 0,
które jest równoważne (𝑣 =
d𝑥 d𝑣
d𝑡
,
d𝑡
=
𝑑2𝑥
d𝑡 2
)
𝑑2𝑥
𝑚 2 + 𝑘𝑥 = 0.
d𝑡
48
Jego rozwiązaniem jest funkcja
𝑥(𝑡) = 𝑥0 cos(𝜔0 𝑡 + 𝜑),
gdzie
𝑘
𝜔0 = √ .
𝑚
Wobec tego całkowita energia mechaniczna tego układu
1
1
𝑈= 2 𝑚𝑥02 𝜔02 sin2 (𝜔0 𝑡 + 𝜑) + 2 𝑘𝑥02 cos 2 (𝜔0 𝑡 + 𝜑) =
1
1
2[
2(
) + cos 2 (𝜔0 𝑡 + 𝜑)] = 𝑘𝑥02 = const..
𝑘𝑥
sin
𝜔
𝑡
+
𝜑
0
0
2
2
Na kolejnej stronie w tabeli prezentujemy zestawienie obu układów
mechanicznego i elektrycznego.
49
50
Podsumowanie
1. Stosując prawo Faradaya współczynnik indukcyjności wzajemnej dwóch cewek
(solenoidów) jest równa
𝑁2 Φ2←1
𝑀2←1 = 𝑀21 =
𝐼1
= 𝑀1←2 = 𝑀12 =
𝑁1 Φ1←2
𝐼2
= 𝑀,
gdzie zastosowano następujące oznaczenia: 𝑀2←1 = 𝑀21 = 𝑀1←2 = 𝑀12
– jest współczynnikiem indukcyjności wzajemnej, przy czym symbole
𝑀2←1 = 𝑀21 oznaczają współczynnik indukcyjności cewki drugiej o liczbie
zwojów 𝑁2 poddanej działaniu pola magnetycznego pierwszej o liczbie zwojów
𝑁1 , w której płynie prąd o natężeniu 𝐼1 a 𝑀1←2 = 𝑀12 jest
współczynnikiem indukcyjności cewki pierwszej poddanej działaniu pola
magnetycznego cewki drugiej w której płynie prąd o natężeniu 𝐼2 ; Φ2←1 jest strumieniem pola magnetycznego przenikającego cewkę drugą znajdującą
się w polu działaniu pola magnetycznego pierwszej a Φ1←2 - jest strumieniem
pola magnetycznego przenikającego cewkę pierwszą znajdującą się w polu
działaniu pola magnetycznego cewki drugiej.
2. Indukowana SEM w cewce 2 wywołana zmianą prądu w cewce pierwszej
wynosi
𝜀2 = −𝑀
d𝐼1
d𝑡
.
3. Współczynnik samoindukcji cewki 𝐿
=
𝑁ΦB
𝐼
, gdzie jest ΦB
jest strumieniem
magnetycznym przenikającym wszystkie zwoje cewki.
4. SEM samoindukcji, której źródłem jest zmiana natężenia prądu
𝐼 w cewce jest
d𝐼
równa 𝜀2 = −𝐿 .
d𝑡
5. Współczynnik samoindukcji cewki o 𝑁 zwojach, polu przekroju poprzecznego 𝐴
i długości 𝑙 jest równy 𝐿
=
𝜇0 𝑁 2 A
𝑙
.
6. Po szeregowym podłączeniu baterii o SEM równej 𝜀 do cewki i oporu
połączonych szeregowo w chwili czasu 𝑡 = 0, natężenie prądu w tym obwodzie
rośnie i jest funkcją czasu
𝜀
𝐼 (𝑡) = [1 − 𝑒 −𝑡/𝜏 ],
𝑅
odłączeniu baterii prąd zanika, jak 𝐼 (𝑡 )
𝜀
gdzie
𝐿
𝜏= .
𝑅
Po
= (𝑅) 𝑒 −𝑡/𝜏 .
7. Magnetyczna energia, tj. energia pola magnetycznego w cewce jest równa
1
𝑈𝐵 = 2 𝐿𝐼 2 .
8. Gęstość energii pola magnetycznego w punkcie, gdzie indukcja pola
magnetycznego jest równa 𝐵, wynosi 𝑢𝐵
51
𝐵2
= 2𝜇 .
0
Naprężenia przenoszone/transmitowane przez pole magnetyczne
Można pokazać, że pole magnetyczne między dwoma „nieskończonymi”
płaszczyznami, po których płyną prądy elektryczne w przeciwnych kierunkach
(patrz rysunek) wynosi 𝑩 = 𝜇0 𝐾ĵ , tj. ma kierunek pionowy i zwrot w górę; pole to
istnieje tylko między przewodzącymi powierzchniami; 𝐾 ma wymiar A/m.
Gęstość energii magnetycznej między powierzchniami jest równa
1
𝑢𝐵 = 𝜇0 𝐾 2 .
2
Pokazuje się, że obie płaszczyzny odpychają się, co nie jest zaskoczeniem,
ponieważ prądy płyną w kierunkach przeciwnych.
52
Ciśnienie wywierane przez dolną powierzchnię na górną i skierowane w
górę (tj. siła skierowana w górę działającą na jednostkę górnej powierzchni)
wynosi (patrz rysunek, na którym pokazano siłę z jaką dolna powierzchnia
oddziaływuje na górną)
𝐵2
𝑝↑ =
.
2𝜇0
Podobnie pokazuje się, że ciśnienie wywierane przez górną powierzchnię na
dolną i skierowane w dół (tj. siła skierowana w dół działającą na jednostkę dolnej
powierzchni) wynosi (patrz rysunek, na którym pokazano siłę z jaką górna
powierzchnia oddziaływuje na dolną)
𝐵2
𝑝↓ =
.
2𝜇0
Jak widzimy pole magnetyczne – skierowane poziomo – wywiera ciśnienia
na obie płaszczyzny w kierunkach prostopadłych do linii pola magnetycznego,
których wartości są takie same, ale przeciwnie skierowane.
53
Wniosek: Pole magnetyczne przenosi/transmituje ciśnienie (między
obydwoma płaszczyznami) w kierunku prostopadłym do linii pola
magnetycznego.
Nasze rozważania możemy uogólnić i rozpatrzeć myślowo wydzieloną
objętość, tj. pudełko, umieszczone w polu magnetycznym, co ilustruje kolejny
rysunek.
Na podstawie wyników poprzednich
rozważań wnioskujemy, że pole
magnetyczne ciśnie na powierzchnie
boczne pudełka, co pokazuje rysunek.
Jeśli pole jest jednorodne, to
wypadkowa siły (siły te na rys. obok
symbolizują szerokie i krótkie
niebieskie
wektory
poziome)
działająca na powierzchnie boczne
pudełka (zaznaczonego na rys.
kolorem niebieskim) jest równa zeru.
O siłach tych mówimy jako o siłach
lateralnych.
Długie pionowe wektory niebieskie reprezentują wektory indukcji
jednorodnego pola magnetycznego, w którym jest umieszczone pudełko.
Ponadto pokazuje się, że na górną i dolną powierzchnię pudełka działają siły
rozciągające je wzdłuż linii pola magnetycznego. Na rysunku siły te są zaznaczone
za pomocą niebieskich pionowych wektorów zaczepionych do górnej i dolnej
powierzchni pudełka. Wartość ciśnienia wywieranego przez jednorodne pole
magnetyczne na powierzchnię (boczną, górna lub dolną) pudełka jest równa 𝑝
𝐵2
2𝜇0
=
. Zauważmy, że ciśnienie to jest równe gęstości energii pola magnetycznego.
54
Podsumowanie: Pola elektromagnetyczne są pośrednikami (mediatorami)
oddziaływań między obiektami. Pola te transportują w przestrzeni naprężenia.
Pole magnetyczne transportuje naprężenia równolegle do linii sił oraz ciśnienie
w kierunkach prostopadłych do nich. Wartość naprężenia lub ciśnienia
transportowanego przez pole jest równe
𝐵2
𝑝 = 𝑢𝐵 = 2𝜇 .
0
Naładowana cząsteczka w zmiennym w czasie polu magnetycznym –
animacja dostępna na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/magnetostatics/forcemovingq/forcemovingq.htm
reprezentuje transport naprężeń przez zmienne w czasie pole magnetyczne, tj.
siłę oddziaływania ze strony zmiennego w czasie pola magnetycznego
na ruchome dodatnie ładunki elektryczne, które poruszają się za kartkę. Pole
zewnętrzne ma wektor indukcji skierowany na rysunku pionowo w dół. Rysunek
pokazuje linie sił pola magnetycznego (cyrkulujących niezgodnie z ruchem
wskazówek zegara) w chwili czasu 𝑡 = 0, którego źródłem są ładunki, czyli prąd
elektryczny płynący przed kartkę. W chwili 𝑡 = 0 zewnętrzne pole magnetyczne
jest równe zeru (patrz zamieszczony wyżej wzór). Po włączeniu pola, tj. dla 𝑡 > 0,
na ładunki zaczyna oddziaływać naprężenie pola magnetycznego, które przejawia
się w postaci poziomej białej (na animacji) siły działającej w prawo. W animacji
przejawia się to w postaci wzmocnienia linii pola magnetycznego po lewej stronie
ładunku. Wektory pola zewnętrznego i pola ładunku dodają się, co przejawia się w
55
ich wydłużaniu i zagęszczaniu się. Natomiast po prawej stronie ubywa linii pola
magnetycznego, co jest konsekwencją tego, że wektory indukcji pola
zewnętrznego i pola pochodzącego od ładunku odejmują się. Po tej stronie
znajduje się także punkt w przestrzeni, w którym wypadkowa wartość indukcji
pola magnetycznego jest równa zeru.
Pole magnetyczne „naciska” na ładunek, ponieważ ciśnienie pola z lewej
strony jest większe niż z prawej. Tym razem pole magnetyczne nie jest
jednorodne, więc ciśnienie (przypomnijmy – prostopadłe do linii pola
magnetycznego), tj. średnia gęstość energii pola magnetycznego po lewej stronie
ładunków, jest większa od gęstości pola magnetycznego po jego prawej stronie.
W rezultacie pojawia się wypadkowa siła skierowana w prawo, która w animacji
jest reprezentowana białym wektorem.
W ten sposób można jakościowo tłumaczyć występowanie siły Lorentza
działającej ze strony pola magnetycznego na poruszające się w nim ładunki
elektryczne.
Zauważmy, że gdyby ładunki poruszały się w kierunku przeciwnym, to
wypadkowa siła przyłożona do ładunków ze strony pola magnetycznego byłaby
skierowana w lewo.
Podobne animacje są dostępne na stronach
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/vectorfields/FluidFlowCurl/ffcurl.htm
oraz
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/vectorfields/FluidFlowCurlConstant/ffcurlconstant.htm
.
56
Tekst jest wolnym tłumaczeniem plików guide10.pdf i guide11.pdf kursu dostępnego na stronie
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/coursenotes/index.htm
Wszystkie rysunki i animacje zaczerpnięto ze strony
http://web.mit.edu/8.02t/www/802TEAL3D/visualizations/faraday/index.htm
57