Nr 58
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Politechniki Wrocławskiej
Nr 58
Studia i Materiały
Nr 25
2005
modelowanie, symulacja, sieć energetyczna, zwarcie,
stan przejściowy, odporność na zakłócenia,
Alternative Transients Program, ATP/EMTP
Piotr URACZ * , Bogusław KAROLEWSKI*
F
F
MODELOWANIE STANÓW PRZEJŚCIOWYCH W SIECIACH
ENERGETYCZNYCH Z WYKORZYSTANIEM PROGRAMU
ATP/EMTP
Przedstawiono opis programów z pakietu ATP przeznaczonego do symulowania stanów przejściowych w sieciach energetycznych. Opis zawiera informacje dotyczące struktury pakietu, sposobu
działania, oraz istotnych właściwości. Zamieszczono porównanie stosowanej w ATP metody całkowania numerycznego wykorzystującej centralne równanie różnicowe z klasyczną metodą Eulera. Posługując się przykładowym schematem energetycznej sieci przemysłowej zaprezentowano sposób
modelowania w ATP, wyniki symulacji oraz ich interpretację.
1. OGÓLNA CHARAKTERYSTYKA PROGRAMU ATP
1.1. ROZWÓJ PROGRAMU I STAN OBECNY
Alternative Transients Program (ATP) jest jednym z najszerzej używanych uniwersalnych programów do cyfrowej symulacji zjawisk przejściowych natury elektromagnetycznej i elektromechanicznej w elektrycznych systemach energetycznych. Przy pomocy
tego programu można symulować prace złożonych sieci i układów sterowania.
ATP powstał na bazie programu EMTP (Electromagnetic Transients Program), którego rozwój zapoczątkowano w latach 70-tych. EMTP był programem dostępnym bezpłatnie do roku 1984. W roku tym główne ośrodki rozwojowe EMTP wysunęły inicjatywę jego komercjalizacji. Część twórców programu nie zgodziła się na to, i stworzyli
ATP opierając się na kodzie EMTP sprzed komercjalizacji. ATP jest teraz dostępny
nieodpłatnie, ale wymaga licencjonowania.
__________
*
Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-372 Wrocław,
ul Smoluchowskiego 19, [email protected], [email protected]
Początkowo ATP nie posiadał graficznego interfejsu użytkownika (GUI). Dane wejściowe wprowadzano w postaci pliku tekstowego. Podobną postać miały uzyskiwane
wyniki. Dlatego w toku prac rozwojowych stworzono szereg programów dodatkowych
ułatwiających pracę z ATP.
Programy z pakietu ATP można podzielić na następujące kategorie:
− preprocesor – ATPDraw, program wykorzystujący GUI do przygotowania danych
wejściowych dla ATP,
− procesory ATP – czyli programy odpowiedzialne za przeprowadzenie obliczeń,
występują w trzech wersjach, których nazwy pochodzą od użytych kompilatorów
Fortranu:
− „GNU/Ming32” ATP – wersja dla Windows 9x/NT/2000/XP,
− „Watcom” ATP – jak wyżej, ale prace nad rozwojem kompilatora wstrzymano w 1999 roku, dlatego zalecana jest wersja GNU/Ming32,
− „Salford” ATP – wersja dla Windows 3.x/95/98/SE,
− postprocesory – GTPPlot, PlotXY, ATP Analyzer i inne – odpowiedzialne za graficzną reprezentację wyników, ich obróbkę (operacje matematyczne, np. konwersja
pary sygnałów z kartezjańskiego do biegunowego układu współrzędnych, filtrowanie, prostowanie, transformacje trójfazowych sygnałów do układu współrzędnych
(d,q,0), (α,β,0), analiza składowych harmonicznych),
− program narzędziowy – ATP Control Center – program „powłoka” do sprawnego
zarządzania i uruchamiania różnych wersji ATP, pre- i postprocesorów.
ATP posiada szeroką bibliotekę wbudowanych modeli elementów sieci, których opis
i sposób użycia przedstawiono w [3, 6]. Biblioteka ta zawiera ponadto szereg elementów
do modelowania układów sterowania (tzw. TACS - Transient Analysis of Control Systems). Użytkownik ATP ma także możliwość tworzenia własnych modeli, zarówno elementów sieci jak i układów sterowania, przy pomocy prostego języka programowania o
nazwie MODELS [7].
1.2. METODA CAŁKOWANIA NUMERYCZNEGO STOSOWANA W ATP
Charakterystyczną cechą ATP, odróżniającą ten pakiet od innych programów do modelowania systemu, takich jak PSCAD/EMTDC, jest zastosowana metoda całkowania
numerycznego. ATP wykorzystuje tzw. metodę centralnego równania różnicowego,
będącą modyfikacją stosowanej w innych programach metody Eulera.
W przypadku metody Eulera, kolejną wartość funkcji wyznacza się z zależności:
f (t ) = f (t − Δt ) + Δt ⋅ f ' (t − Δt )
zaś wykorzystując metodę równania centralnego:
(1)
f (t ) = f (t − Δt ) + Δt ⋅
f ' (t ) + f ' (t − Δt )
2
(2)
W metodzie Eulera przyrost funkcji obliczany jest na podstawie nachylenia funkcji
w poprzednim kroku obliczeń. Modyfikacja polega na tym, że do obliczenia aktualnej
wartości funkcji wykorzystuje się zarówno nachylenie tej funkcji w kroku poprzednim
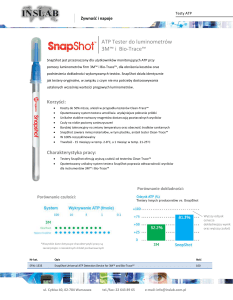
jak i w aktualnym. Przyrost funkcji obliczany jest jako średnia obu nachyleń. Zilustrowano to na rys. 1, przedstawiającym fragment przebiegu sinusoidalnego
o częstotliwości 50Hz. Wartość funkcji w punkcie B jest obliczana na podstawie średniej arytmetycznej wartości pochodnych w punktach A (pochodnej w punkcie A odpowiada nachylenie odcinka CD) i B (odcinek DE). Ponieważ pochodne te mają równe wartości i przeciwne znaki, wartość funkcji w punkcie B, obliczona metodą
równania centralnego jest taka sama jak w punkcie poprzednim.
Rys. 1 Rozwiązywanie równania różniczkowego metodą Eulera i równania centralnego
Fig. 1 Solving differential equation using Euler method and central difference equation
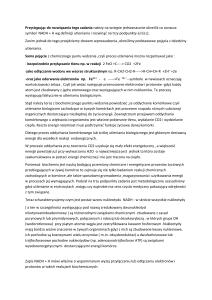
Zaletą stosowanej w ATP/EMTP metody całkowania numerycznego jest zwiększenie
dokładności obliczeń (rys. 2), bez zwiększania obciążenia komputera. Wprawdzie wymagany jest zapis wartości pochodnej na końcu każdego kroku całkowania w celu jej
wykorzystania w następnym kroku, ale wartość pochodnej w każdym punkcie obliczana
jest tylko raz. Modyfikacja nie powoduje zatem istotnego wzrostu czasu obliczeń, co ma
szczególne znaczenie w przypadku rozbudowanych modeli sieci.
Metoda równania centralnego ma jednak także istotną wadę, jaką jest powstawanie
oscylacji rozwiązania w przypadku skokowej zmiany wartości funkcji np. w wyniku
przerwania prądu przez wyłącznik. Aby zapobiec generowaniu drgań w takich sytuacjach, trzeba stosować specjalne techniki – np. bocznikowanie indukcyjności odpowiednio dobranymi rezystancjami [1, 5, 8].
Rys. 2 Wyniki całkowania równania różniczkowego porównywanymi metodami dla kroku obliczeń:
a) 2ms, b) 1ms
Fig. 2 Results of integrating a differential equation using the compared methods for time step of:
a) 2ms, b) 1ms
2. MODEL PRZYKŁADOWEJ SIECI ZAKŁADOWEJ
W celu zilustrowania możliwości programu ATP wykonano badania przykładowej
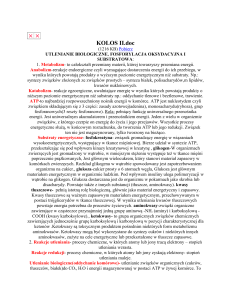
sieci o danych zaczerpniętych z [4]. Schemat sieci przedstawiono na rys. 3. Jest to typowa sieć przemysłowa średniego napięcia, w której główne szyny zbiorcze GPZ–1 pracują pod napięciem 30kV. Szyny te zasilane są przez dwa równoległe bloki generator –
transformator o mocy 60MW każdy. Moc elektrowni zakładowej uzupełniana jest przez
system za pośrednictwem transformatora sprzęgłowego z przyłącza o napięciu 110kV.
Obciążenie stanowi pięć odbiorów impedancyjnych oraz silnik indukcyjny M1. Moc
odbiorów w MW i MVAr podano na rysunku w nawiasach.
Rys. 3 Schemat sieci przemysłowej [4]
Fig. 3 Diagram of an industrial grid
Uwzględniono oddziaływanie regulatora prędkości obrotowej turbiny (Rp) i układów automatycznej regulacji wzbudzenia generatorów (Rvf). Model Rvf składa się z
zastępczej transmitancji regulatora, wzbudnicy i stabilizatora w torze sprzężenia
zwrotnego oraz ogranicznika sygnału. Sygnałami wejściowymi regulatora są napięcia
fazowe na zaciskach generatora. Model regulatora prędkości turbiny Rp oddziaływuje
na model turbiny dwustopniowej z międzystopniowym przegrzewaczem pary.
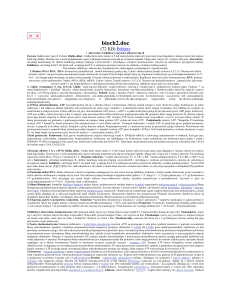
Na rysunku 4 przedstawiono schemat modelu sieci opracowany w programie
ATPDraw. System energetyczny modelowany jest jako idealne źródło napięcia połączone szeregowo z modelem impedancji dla składowej zgodnej i zerowej. Transformator
sprzęgłowy zamodelowano z użyciem modelu transformatora Yd (przyjęto, że wszystkie
transformatory mają konfigurację Yd11) o liniowej charakterystyce magnesowania.
Punkt gwiazdowy TS uziemiony jest przez impedancję 0,5Ω, natomiast w pozostałych
transformatorach jest on izolowany (co jest modelowane uziemieniem przez rezystancję
1MΩ). Pomiędzy łącznikiem systemowym a szynami GPZ umieszczono układ do pomiaru przepływu mocy czynnej i biernej z systemu. ATP nie posiada wbudowanych
elementów do bezpośredniego wyznaczania tych wielkości. Konieczne jest stworzenie
własnego programu w języku MODELS lub wyznaczanie mocy przez obróbkę uzyskanych przebiegów prądów i napięć przy pomocy programu ATPAnalyzer. Wadą tego
programu jest jego powolność, dlatego wykorzystano pierwszy sposób. Linie kablowe
zamodelowano przy pomocy elementów liniowych o parametrach skupionych. Odbior-
niki od Z1 do Z5 zamodelowano jako impedancje o stałej wartości. W celu odwzorowania silnika M1 wykorzystano wbudowany model maszyny uniwersalnej (typ UM3), a
parametry maszyny obliczono wykorzystując specjalny program pomocniczy. Równanie
ruchu silnika zamodelowano przy pomocy równoważnego obwodu elektrycznego, w
którym napięcie odpowiada prędkości obrotowej, prąd - momentowi obciążenia, pojemność - momentowi bezwładności maszyny, itd. [3, 6]. Model trójfazowych rezystancji
połączonych w gwiazdę, umieszczony na rys. 4 obok modelu silnika UM3, służy do
eliminacji oscylacji numerycznych.
Rys. 4 Schemat modelu sieci przemysłowej w ATPDraw
Fig. 4 ATPDraw diagram of an industrial grid
Metody obliczeniowe programu ATP wymagają wyprowadzenia punktu neutralnego
z każdego połączenia gwiazdowego, nawet w modelu silnika. Dlatego punkt neutralny
stojana maszyny uziemiono przez dużą rezystancję (1MΩ), co oznacza, że praktycznie
jest on izolowany. Na szynach GPR–1 oraz po stronie wtórnej transformatora TB1
umieszczono łączniki, które wykorzystano do symulacji zwarcia doziemnego.
3. PRZYKŁADOWE BADANIA ODPORNOŚCI SIECI NA ZAKŁÓCENIA
3.1 SCENARIUSZ BADAŃ SYMULACYJNYCH
Przeprowadzono badania przebiegu zakłóceń w przedstawionej sieci. Symulowano
zwarcie trójfazowe przez rezystancję przejścia 0,01Ω, które zostaje wyłączane przez
automatykę zabezpieczeniową. Scenariusz symulacji był następujący: w chwili t=0,5 s
załączenie silnika, następnie w chwili t=1,5 s zwarcie trójfazowe w wybranym węźle
wyłączane po czasie 0,2 s. Symulacje objęły dwa miejsca wystąpienia zwarcia, zaznaczone na rys. 3: na szynach GPR–1, czyli w pobliżu silnika (wariant I) oraz na zaciskach
generatora TG1 (wariant II). Rejestrowano przebiegi napięcia i prądu jednej z faz stojana
silnika M1, prędkości obrotowej silnika M1 oraz napięcia i prądu jednej z faz generatora
TG1.
3.2 WYNIKI BADAŃ SYMULACYJNYCH
3.2.1 ZWARCIE NA SZYNACH GPR–1
Rys. 5 Przebiegi napięcia i prądu fazowego na zaciskach generatora TG1 w wariancie I
Fig. 5 Phase voltage and current at terminals of generator TG1 in variant I
Rys. 6 Przebiegi napięcia i prądu fazowego na zaciskach silnika M1 w wariancie I
Fig. 6 Phase voltage and current at terminals of motor M1 in variant I
Rys. 7 Przebiegi prędkości kątowej silnika M1 w wariancie I
Fig. 7 Angular speed of motor M1 in variant I
3.2.2 ZWARCIE NA ZACISKACH GENERATORA TG1
Rys. 8 Przebiegi napięcia i prądu fazowego na zaciskach silnika M1 w wariancie II
Fig. 8 Phase voltage and current at terminals of motor M1 in variant II
Rys. 9 Przebiegi prędkości kątowej silnika M1 w wariancie II
Fig. 9 Angular speed of motor M1 in variant II
Rys. 10 Przebiegi napięcia i prądu fazowego na zaciskach generatora TG1 w wariancie II
Fig. 10 Phase voltage and current at terminals of generator TG1 in variant II
3.2.3. INTERPRETACJA WYNIKÓW I WNIOSKI
W wyniku wystąpienia zwarcia na szynach GPR–1, a więc w pobliżu silnika M1, następuje znaczący spadek napięcia na jego zaciskach (rys. 6). W tym momencie silnik
przechodzi do stanu pracy generatorowej zasilając prąd zwarciowy. Faza prądu stojana
silnika M1 zmienia się w przybliżeniu o 180 stopni. W czasie zwarcia silnik wytraca
prędkość pod wpływem obciążenia (rys. 7). Dlatego w momencie wyłączenia zwarcia,
występuje zwiększony pobór prądu związany z ponownym rozruchem silnika. Widoczny jest spadek napięcia na zaciskach stojana związany zarówno z pierwszym jak i
drugim rozruchem.
Dla odległego elektrycznie generatora TG1 spadek napięcia związany z rozruchem
silnika pozostaje praktycznie niezauważalny. Zwarcie na szynach GPR–1 przejawia
się niewielkim, około 10%, spadkiem napięcia i około 2-krotnym wzrostem prądu
fazowego generatora (rys. 5).
Zwarcie na zaciskach generatora TG1 (wariant II) skutkuje ponad 10-krotnym
wzrostem jego prądu fazowego oraz spadkiem napięcia do około 10% wartości znamionowej (rys. 10). Taki wzrost obciążenia powoduje na tyle znaczne wyhamowanie
generatora, że po ustaniu zwarcia, przechodzi on w tryb rozruchu asynchronicznego,
co przejawia się zmianą kąta fazowego jego prądu. Po upływie około jednej sekundy
generator powraca do normalnego stanu pracy.
Napięcie na zaciskach silnika M1 obniża się w tym przypadku o około 40%. Nie
powoduje to znacznego obniżenia jego prędkości obrotowej. W przebiegu prądu widoczny jest krótki okres pracy generatorowej, jednak w tym przypadku do sieci wprowadzana jest o wiele mniejsza moc.
Wyniki przeprowadzonych badań symulacyjnych są zgodne z logiką i potwierdzają
poprawność modelu.
4. PODSUMOWANIE
Program ATP nadaje się do modelowania złożonych sieci energetycznych
z uwzględnieniem pracy układów sterowania i przekształtników energoelektronicznych w stanach nieustalonych i ustalonych.
Do budowy modelu można wykorzystywać zarówno elementy wbudowane jak
i tworzone przez użytkownika.
Wykorzystanie modelu sieci utworzonego w ATP umożliwia symulowanie zjawisk
przejściowych oraz badanie wpływu procesów łączeniowych i zakłóceniowych na
pracę sieci np. przy przełączeniach, w stanach zwarć, przy zmianie obciążenia, przy
zmianie warunków współpracy systemu z siecią lokalną (black-out). Program umożliwia również modelowanie bardziej skomplikowanych zjawisk w sieci z wykorzystaniem rozbudowanych modeli jej elementów. Można przykładowo badać powstawanie
przepięć o różnym czasie trwania i różnych częstotliwościach. Z uwagi na rozbudowę
modeli, trzeba wtedy ograniczyć zasięg sieci lub zastąpić odległe elementy prostszymi
ekwiwalentami.
Stosowana w programie metoda rozwiązywania równań różniczkowych wykorzystująca centralne równanie różnicowe pozwala uzyskać dokładniejsze rozwiązanie bez
zwiększania obciążenia komputera. Problemy powstające w wyniku nieciągłości przebiegów różniczkowanych są znane i opracowano metody ich eliminacji.
LITERATURA
[1] ALVARADO F., Eliminating numerical oscillations in trapezoidal integration, EMTP Newsletter,
Feb. 1982, vol. 2, no. 3, 20-32.
[2] ANDERSON P. M., FOUAD A. A., Power System Control and Stability, Iowa State University Press,
Ames, 1977.
[3] ATP-EMTP Rule Book, Canadian/American EMTP User Group, 1987-92.
[4] BAŁABAN E., DZIERŻANOWSKI W., PYTEL J., REBIZANT W., Badanie za pomocą programu
EMTP odporności sieci zakładowej na zakłócenia, Rap. Inst. Energoeektryki. PWr, serii SPR nr
47/2000 (nie publikowane).
[5] BRANDWAJN V., Damping of numerical noise in the EMTP solution, EMTP Newsletter, Feb. 1982,
vol. 2, no. 3, 10-19.
[6] DOMMEL H.W., Electromagnetic Transients Program. Reference Manual (EMTP theory book),
Bonneville Power Administration, Portland 1986.
[7] DUBE L., Users guide to MODELS in ATP, April 1996.
[8] MARTI J. R., LIN J., Suppression of numerical oscillations in the EMTP, IEEE Transactions on
Power Systems, May 1989, vol. 4, no. 2, 739-747.
MODELING OF POWER GRID TRANSIENTS USING ATP/EMTP SOFTWARE
A description of ATP package designed for simulation of transients in power grids has been presented. The description contains information referring to structure of the package, operation method, and
essential features. A comparison of central difference equation method (used in ATP) and classical Euler
method of numerical integration has been published. Using an exemplary diagram of an industrial power
grid, a way of modeling in ATP, simulation results and their interpretation has been presented.