Ćwiczenie 12
MOSTKI NIEZRÓWNOWAŻONE PRĄDU STAŁEGO
I. Cel ćwiczenia
Celem
ćwiczenia
jest
badanie
właściwości
metrologicznych
mostków
niezrównoważonych prądu stałego w układach współpracy z wybranymi modelami
czujników rezystancyjnych.
II. Zagadnienia
1. Mostek niezrównoważony prądu stałego o równych ramionach z jednym, dwoma
i czterema czujnikami;
2. Mostek niezrównoważony prądu stałego ze stosunkiem ramion z jednym
czujnikiem;
3. Właściwości statyczne czujników rezystancyjnych.
III. Wprowadzenie
3.1. Mostki niezrównoważone prądu stałego
Mostki niezrównoważone prądu stałego współpracujące z rezystancyjnymi czujnikami
(temperatury, siły, ciśnienia itp.) są powszechnie stosowane w pomiarach wielkości
nieelektrycznych metodami elektrycznymi.
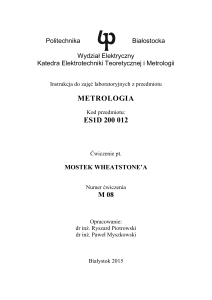
W takim łańcuchu powtarzania wielkości nieelektrycznej można wyróżnić dwa
podstawowe elementy: czujnik rezystancyjny i niezrównoważony mostek prądu stałego
(rys. 12.1)
Rys. 12.1. Schemat blokowy toru przetwarzania wielkości nieelektrycznej X na sygnał
napięciowy U w lub prądowy I w
116
Statyczną funkcję przetwarzania pierwszego elementu – czujnika rezystancyjnego
przetwarzającego mierzoną wielkość nieelektryczną X na wielkość elektryczną, którą
jest zmiana rezystancji R opisuje ogólna zależność:
R f x
(12.1)
Drugi element toru przetwarzania – mostek niezrównoważony prądu stałego
przetwarza zmianę rezystancji R na sygnał wyjściowy napięciowy U w lub prądowy
I w , które można łatwo mierzyć lub wykorzystać do dalszego przetwarzania.
Jeżeli mostek jest zasilany napięciowo napięciem U z lub prądowo prądem I z to
wyjściowe sygnały mostka można opisać ogólnymi zależnościami:
U w F R, U z F f x , U z lub U w' F ' R, I z F ' f x , I z
(12.2)
I w F1 R,U z F1 f x ,U z lub I w' F1 R, I z F1 f x , I z
(12.3)
'
'
Wyrażenia te przedstawiają odpowiednio napięciowe i prądowe statyczne funkcje
przetwarzania
mostka
niezrównoważonego
prądu
stałego
współpracującego
z czujnikiem rezystancyjnym. W mostku zasilanym z wysokostabilnego zasilacza
napięciowego lub prądowego można przyjąć że sygnały wyjściowe U w i I w nie zależą
od wartości U z lub I z i są tylko zależne od zmian rezystancji R czujnika w funkcji
mierzonej wielkości fizycznej X .
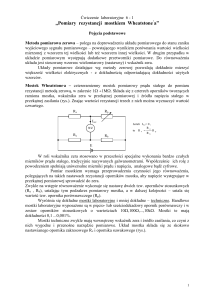
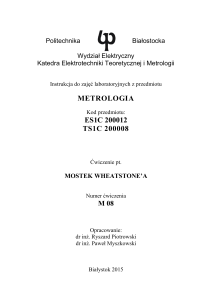
Podstawowy układ niezrównoważonego mostka Wheatstone’a przy zasilaniu
napięciowym przedstawia rysunek 12.2.
Rys. 12. 2.
Niezrównoważony mostek Wheatstone’a
117
Z twierdzenie Thevenina można otrzymać wyrażenie na napięcie mostka U w :
dla Rz 0
U z' U z
Uw Uz
R1R4 R2 R3
R1 R2 R3 R4
(12.4)
oraz warunek równowagi dla mostka zrównoważonego przy U w 0
R1 R4 R2 R3
(12.5)
Z warunku tego korzysta się stosując mostki zrównoważone U w 0 do dokładnych
pomiarów rezystancji.
We
współczesnych
systemach
pomiarowych
i
systemach
regulacji
automatycznej istnieje potrzeba dysponowania i przetwarzania sygnałów elektrycznych
(najczęściej napięciowych lub prądowych) związanych określonymi zależnościami
z mierzonymi (mierzonymi i regulowanymi) wielkościami fizycznymi. W takich
sytuacjach układ mostka zrównoważonego jest mało przydatny, natomiast interesujące
jest wykorzystanie mostka niezrównoważonego pracującego jako przetwornik zmiany
rezystancji R czujnika w napięcie U w lub prąd I w .
W mostku mogą występować jeden, dwa lub cztery czujniki rezystancyjne. Często
gałęzie mostka dobiera się tak że stan równowagi mostka występuje gdy
R1 R2 R3 R4 R .
(12.6)
Mostek taki nazywamy równoramiennym. W mostku równoramiennym z niewielkimi
przyrostami rezystancji w czterech gałęziach czujnikowych Rn n 1,2,3,4 przy
Rn R Rn słuszna jest przybliżona zależność
1
Uz
R1 R2 R3 R4
Uw
4 R
2
R
R
R
n R
2
n 1 R
(12.7)
Z ostatniego równania i rysunku 2 wynikają zasady włączania czujników pomiarowych
w gałęzie mostka niezrównoważonego: zmiany rezystancji czujników włączonych
w gałęzie sąsiednie powinny być o przeciwnych znakach, natomiast zmiany rezystancji
czujników włączonych w przeciwległe gałęzie powinny być o takich samych znakach.
Szczególnym przypadkiem jest równość wartości bezwzględnej przyrostów
R1 R2 R3 R4 R .
(12.8)
W stanie początkowym, gdy mostek jest zrównoważony Rn=0 i Uw=0. Zmiany
rezystancji w gałęziach mostka powodują wystąpienie w przekątnej pomiarowej
mostka sygnału niezrównoważenia w postaci napięcia UW lub prądu IW. Dla stałej
118
wartości napięcia Uz zasilającego mostek, związek między zmianą rezystancji
R
R
w gałęziach czujnikowych a napięciem wyjściowym UW określają statyczne funkcje
przetwarzania (Tablica 12.1).
Tablica 12.1. Niezrównoważony mostek Wheatstone’a
(podstawowe zależności dla zasilania napięciowego)
Zmiany rezystancji
Napięcie wyjściowe (Rw=)
R1 R
R2 R3 R4 0
Uw
R1 R2 R
R3 R4 0
R1 R4 R
R2 R3 0
R1 R4 R2 R3 R
1 UZ
R
U R
; UW Z
2 2 R R
4 R
R
U R
UW Z
2 R
Uz
R
U R
Uw
; UW Z
2R R
2 R
2
R
R
UW U Z
R
Ogólnie mostki niezrównoważone mają nieliniowe funkcje przetwarzania. Jedynie dla
wybranych konfiguracji i przy ograniczeniach zakresów odstrojenia od stanu
równowagi mogą być przyjęte liniowe charakterystyki przetwarzania.
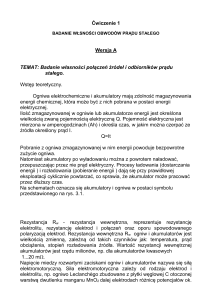
Odstępstwo od charakterystyki liniowej można ocenić za pomocą błędu liniowości:
L
UW UWL
UWL
lub
L
U max
UW max
(12.9)
Podane definicje ilustruje rysunek 3. Modele liniowe charakterystyki mostka U WL
realizowane są przy pomocy stycznej i siecznej.
Rys. 12.3. Ilustracja do definicji błędów liniowości
119
Szczególnym przypadkiem mostka niezrównoważonego jest mostek ze stosunkiem
ramion (tablica 12.2). Zaletą tego układu jest możliwość wpływania na czułość
i liniowość przetwarzania, co wykorzystuje się w różnego rodzaju układach
kompensujących niepożądane wpływy wielkości fizycznych.
Tablica 12.2.
Niezrównoważony stosunkowy mostek Wheatstone’a z jednym czujnikiem
(podstawowe zależności dla zasilania napięciowego)
Układ mostka
Zmiana rezystancji:
R1 R
R2 R3 R4 0
R1 R3 R; R2 R4 nR;
n R
1
UW
U Z
R (n 1) 2 1 R
(n 1) R
n R
U WL
UZ
R(n 1) 2
U UWL
R
L W
UWL
(n 1) R R
Napięcie wyjściowe Uw
(Rw=)
Przybliżenie liniowe UW
dla R << (n+1)R
Błąd liniowości mostka
3.2. Linearyzacja układów z mostkami niezrównoważonymi
Równoramienny mostek z jednym czujnikiem, wstępnie zrównoważony, posiada
nieliniową funkcję przetwarzania U w f r
Uw
gdzie r
R
R
1 Uz
r
2 2r
120
(12.10)
Rys. 12.4. Zasada linearyzacji charakterystyki statycznej mostka prądu stałego
Linearyzację charakterystyki statycznej przedstawionej na rys. 12.4a można
uzyskać stosując stabilizacji prądu I g w gałęzi czujnika (rys. 12.4b). Dla uzyskania
takiego efektu potrzebne są odpowiednie zmiany napięcia zasilania mostka U z .
Przykładowo dla wzrostu rezystancji czujnika ( R dodatnie) prąd I g zmniejszy się
i dla jego stabilizacji należy odpowiednio zwiększyć napięcie zasilania U z . Cała
operacja stabilizacji prądu I g poprzez regulację napięcia zasilania może odbywać się
automatycznie w układzie stabilizatora elektronicznego.
Napięcie wyjściowe mostka U w jest określone wyrażeniem
1
U w I g R
2
(12.11)
Przykład układu linearyzującego charakterystykę mostka przedstawia rysunek 12.5.
Liniowa funkcja przetwarzania w układzie jest określona zależnością:
R R
U wy U 0,5 s
R R
(12.12)
Rys. 12.5. Układ linearyzujący charakterystykę statyczną mostka niezrównoważonego
prądu stałego
121
Poprawę liniowości statycznej funkcji przetwarzania mostka niezrównoważonego
prądu stałego można uzyskać stosując mostek stosunkowy (tablica 12.2). Dla dużych
wartości n (praktycznie n 10 ) błąd liniowości maleje n razy, względem mostka
równoramiennego, ale także tak samo zmniejsza się czułość mostka.
R R 100
dla 100 C Lm LNi
Rys. 12.6. Zasada linearyzacji charakterystyki układu czujnik Ni100 – mostek
niezrównoważony: a) schemat ideowy układu, b) podstawowe charakterystyki statyczne
W niektórych sytuacjach nieliniowy mostek niezrównoważony może spełniać rolę
układu linearyzującego nieliniowy czujnik pomiarowy (rys. 12.6). Najlepszy skutek
linearyzacji osiąga się wtedy, gdy charakterystyka przetwarzania mostka jest odwrotna
(w znaczeniu matematycznym) względem charakterystyki czujnika.
W praktycznych sytuacjach funkcje przetwarzania czujnika i mostka nie są dokładnie
odwrotne i w celu linearyzacji (poprawy liniowości) układu czujnik-mostek należy
wyznaczyć błąd liniowości czujnika LC dla górnej granicy przyjętego zakresu
pomiarowego (na rys. 12.6b jest to wartość 100 C ) a następnie dla odpowiadającego
tej wartości zakresowej przyrostu rezystancji czujnika
R
obliczyć z wyrażenia na
R
błąd liniowości LM mostka stosunkowego (tablica 12.2) wymagany stosunek ramion
n oraz rezystancji n R przy założeniu równości wartości bezwzględnych błędów
liniowości czujnika i mostka
LC LM .
122
(12.13)
IV. Program ćwiczenia
Zadania laboratoryjne
4.1.
Wyznaczanie statycznej funkcji przetwarzania mostka niezrównoważonego ze
zmianą rezystancji w jednej gałęzi.
4.2.
Badanie mostka z różnicowymi zmianami rezystancji w dwóch ramionach
mostka.
4.3.
Wyznaczenie charakterystyki statycznej mostka dla zmian rezystancji
w czterech ramionach.
4.4.
Linearyzacja charakterystyki mostka zawierającego liniowy model czujnika
temperatury.
4.5.
Badanie mostka z czujnikiem Pt100.
4.6.
Wyznaczanie charakterystyki mostka równoramiennego z modelem czujnika
Ni100.
4.7.
Linearyzacja charakterystyki statycznej układu: mostek stosunkowy – model
czujnika Ni100.
4.8.
Opracowanie wyników i przeprowadzenie dyskusji dotyczącej wyników
pomiarów.
V. Pytania kontrolne
1. Omówić zasadę działania mostka niezrównoważonego prądu stałego. Podać
równanie mostka i narysować jego charakterystyki dla jednej, dwóch i czterech
gałęzi czynnych.
2. Od czego zależy czułość mostka niezrównoważonego prądu stałego?
3. Omówić zastosowanie mostka niezrównoważonego prądu stałego do korekcji
nieliniowości czujników rezystancyjnych.
4. Podać przykłady wykorzystania mostków niezrównoważonych prądu stałego
w pomiarach wielkości nieelektrycznych.
123
Literatura
1. Kowalczyk A.: Miernictwo elektryczne wielkości nieelektrycznych – materiały
pomocnicze do wykładu. OW PRz, Rzeszów 1997.
2. Marcyniuk A., Pasecki E. Pluciński M., Szadkowski B.: Podstawy metrologii
elektrycznej. WNT, Warszawa 1984.
3. Polska Norma PN-83/M-53852 – charakterystyki termometryczne oporników
(rezystorów) termometrycznych.
4. Szumielewicz B., Słomski B., Styburski W.: Pomiary elektroniczne w technice.
WNT, Warszawa 1982.
124