Studium Doktoranckie Wydziału Elektrotechniki i Automatyki
Jednofazowy falownik napięcia z aktywnym obwodem
odsprzęgającym
Piotr CZYŻ
[email protected]
Opiekun naukowy: prof. dr hab. inż. Janusz Nieznański
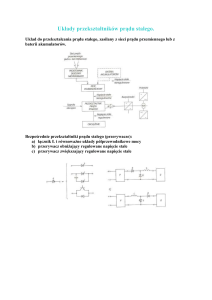
I. Wstęp
Dla
jednofazowego
falownika
napięcia
generowana na wyjściu chwilowa moc czynna
głównie zawiera składową stałą oraz składową
zmienną o częstotliwości dwukrotnie większej od
częstotliwości sieci. Ograniczenie składowej
zmiennej prądu pobieranego ze źródła napięcia
stałego w najprostszym przypadku można
uzyskać
poprzez
zastosowanie
baterii
kondensatorów o stosunkowo bardzo dużej
wartości pojemności. Sposób ten, określany
odsprzęganiem pasywnym, realizowany jest
najczęściej z wykorzystaniem kondensatorów
elektrolitycznych. Ich krótki czas życia jest
najczęstszą przyczyną awarii falowników,
natomiast duże gabaryty determinują wymiary
przekształtnika. Aby zwiększyć niezawodność
i kompaktowość urządzeń stosowane są
aktywne układy odsprzęgania mocy (z ang.
Active Power Decoupling - APD). Techniki te
zakładają
wykorzystanie
dodatkowych
łączników, dławika i kondensatorów, które
pozwalają na zmniejszenie wartości pojemności
baterii
kondensatorów,
dzięki
czemu
kondensatory elektrolityczne można zastąpić
polipropylenowymi kondensatorami foliowymi
typu MKP.
Przedstawiono
wyniki
symulacyjne
oraz
eksperymentalne
działania
jednofazowego
falownika napięcia z APD w układzie
podwyższającym napięcie. W pierwszej części
zaprezentowano ideę odsprzęgania składowej
przemiennej
mocy.
Głównym
punktem
opracowania jest zaproponowany sposób
sterowania
tranzystorami,
umożliwiający
magazynowanie
i
oddawanie
energii
z kondensatora odsprzegającego w zależności
od różnicy pomiędzy chwilową i średnią mocą
wyjściową. W celu weryfikacji zaproponowanego
modelu sterowania przeprowadzono symulacje
w programie PSIM. Działanie zaproponowanego
rozwiązania
zostało
zademonstrowane
w prototypie falownika jednofazowego przy mocy
wyjściowej ok. 500 W. Wykonano badania
statyczne
zbudowanego
prototypu
oraz
pomierzono sprawność układu. Zarejestrowane
przebiegi charakteryzują się dużą zbieżnością
z wynikami symulacji komputerowych.
V. Podsumowanie
Przedstawiono
wyniki
symulacyjne
oraz
eksperymentalne
działania
jednofazowego
falownika napięcia z aktywnym obwodem
odsprzęgającym w układzie podwyższającym
napięcie. Wyniki eksperymentalne potwierdzają,
że
prąd
wejściowy
posiada
znacznie
zredukowaną
drugą
harmoniczną.
Mimo
dodatkowych elementów aktywnych i pasywnych
sprawność układu jest na wysokim poziomie
i wynosi ok. 94,2%. Zaproponowane rozwiązanie
charakteryzuje
się
łatwą
implementacją
w falowniku jednofazowym i pozwala na
skuteczną
redukcję drugiej harmonicznej
z napięcia i prądu wejściowego. Dzięki
zastosowaniu kondensatorów polipropylenowych
zamiast
kondensatorów
elektrolitycznych
spodziewane jest także wydłużenie żywotności
urządzenia.
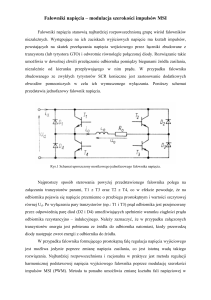
II. Zasada działania układu z aktywnym obwodem odsprzęgającym
W jednofazowym falowniku napięcia wyjściowe wielkości chwilowe można opisać jako:
u AC (t ) 2 U AC sin(t ), i AC (t ) 2 I AC sin(t )
Na podstawie powyższego opisu można zatem przedstawić moc wyjściową falownika pAC(t) jako:
p AC (t ) u AC (t ) i AC (t ) U AC I AC (cos( ) cos( 2t ))
Moc wyjściowa zawiera zatem dwie składowe: zmienną o częstotliwości równej podwojonej częstotliwości
generowanej na wyjściu falownika oraz składową stałą. Aby uniknąć występowania dużych tętnień
napięcia i prądu w obwodzie napięcia stałego najczęściej stosuje się odsprzęganie pasywne, realizowane
za pomocą dużej baterii kondensatorów elektrolitycznych (Clink). Zastosowanie aktywnego obwodu
odsprzęgania
mocy
pozwala
na idc
idec T
T1
T3
wyeliminowanie
baterii
kondensatorów
5
elektrolitycznych. Ideą działania aktywnego
Lout
Rload
odsprzęgania
mocy
w
topologii UDC
Ldec
Cstore
iout
Cout
podwyższającej napięcie jest zastosowanie
ustore
uout
Clink
dodatkowego
kondensatora
wysokoT6
napięciowego Cstore, który zamiast baterii
T2
T4
Clink służy do magazynowania energii
potrzebnej na wyeliminowanie składowej
zmiennej mocy.
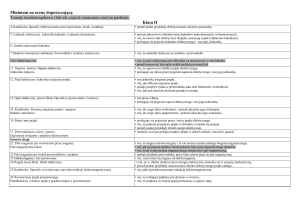
III. Strategia sterowania
Po prawej przedstawiono schemat algorytmu
P
p
sterowania falownika z aktywnym obwodem
u
odsprzęgającym, który składa się z układu
T5, T6
regulacji napięcia średniego w obwodzie Ustore +
+
ustore
Regulator
Cstore
+
predykcyjny
PID
odsprzęgającym
oraz z
bloku regulatora
prądu
predykcyjnego
prądu.
Sterowanie
układem
zrealizowano w oparciu o pomiar napięcia
Uśrednianie
kondensatora ustore, prądu dławika idec oraz prądu
wyjściowego
iout.
W
układzie
regulacji
wartości średniej napięcia na kondensatorze odsprzęgającym przyjęto stałą wartość zadaną równą 260 V.
W omawianym układzie regulacji wykorzystano regulator PID. Wartość prądu referencyjnego obliczana
jest na podstawie różnicy pomiędzy mocą średnią, a mocą chwilową odniesioną do napięcia wejściowego
DC. Do formowania przebiegów prądu odsprzęgającego wykorzystano klasyczny regulator predykcyjny.
Algorytm sterowania zaimplementowano w mikrokontrolerze sygnałowym TMS320F28335.
AVG
out
DC
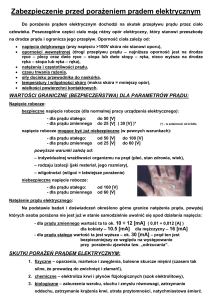
IV. Wyniki symulacyjne i eksperymentalne
W celu weryfikacji zaproponowanego modelu
sterowania przeprowadzono symulacje i wykonano
prototyp falownika. Zarówno w modelu symulacyjnym
jak i rzeczywistym prototypie użyto tych samych
parametrów. Po prawej zostały zeprezentowane
wybrane przebiegi symulacyjne prądów i napięć
falownika w stanie ustalonym przy mocy wyjściowej
500 W. Z rysunku (d) można odczytać, że wartość
zadanego napięcia kondensatora odprzęgającego
wynosiła 260 V oraz że jego częstotliwość jest dwa razy
większa od częstotliwości napięcia wyjściowego.
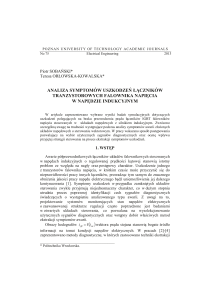
Zaproponowany układ aktywnego odsprzęgania mocy
w
jednofazowym
falowniku
napięcia
został
przetestowany w wykonanym prototypie. Wyniki
przedstawione na oscylogramie potwierdzają poprawną
pracę układu. Z oscylogramu można odczytać, że
fluktuacje prądu wejściowego wynoszą mniej niż 20%.
Przy mocy wyjściowej ok. 500 W i zadanej wartości
napięcia średniego na kondensatorze odsprzęgającym
260 V napięcie fluktuuje ok. ±60V. Zmierzona
w układzie
sprawność
wynosi 94,2%.
Fotografia
wykonanego
prototypu
Wyniki symulacyjne:
a)
3.6
idc [A]
3.4
3.2
0
10
20
30
40
50
b)
60
70
80
90
100
t [ms]
10
iout [A]
0
-10
0
10
20
30
40
50
60
70
80
90
100
t [ms]
c)
200
uout [V]
0
-200
0
10
20
30
40
50
d)
60
70
80
90
100
t [ms]
350
ustore [V]
300
250
200
0
10
20
30
40
50
60
70
Wyniki eksperymentalne:
80
90
100
t [ms]