Projektowanie systemów EM
dr inż. Michał Michna
Rozwój Maszyn Elektrycznych
2
dr inż. Michał Michna
2013-03-29
Literatura
Dąbrowski M.: Projektowanie maszyn elektrycznych
prądu przemiennego. Warszawa, Wydaw. Nauk. Techn., 1988.
Gieras J.F.: Mitchell Wing, Permanent Magnet Motor
Technology, 2nd ed. Marcel Dekker, Inc, 2002
Gieras J.F: Advancements in Electric Machines.
Springer-Verlag Gmbh 2008
Hanselman D.: Brushless Permanent Magnet Motor
Design, 2nd ed. McGraw-Hill, New York, 1994.
Pyrhönen J., Jokinen T., Hrabovcová V.: Design of
Rotating Electrical Machines Wiley 2008
3
dr inż. Michał Michna
2013-03-29
Rozwój maszyn elektrycznych
Przyczyny rozwoju ME
4
Inżynieria materiałowa
Nowe zastosowania
Energoelektroniki i metody sterowania
Wymagania środowiskowe/polityczne – ochrona
środowiska, oszczędzanie energii
Duże projekty naukowe – MEA, HEV/EV, ogniwa
paliwowe, budynki inteligentne, bioinżynieria
dr inż. Michał Michna
2013-03-29
Rozwój maszyn elektrycznych
Maszyny
wysokoobrotowe
5
dr inż. Michał Michna
2013-03-29
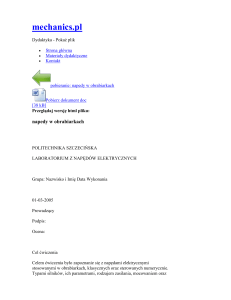
Napięcie stałe (DC)
Prąd stały (DC)
Silnik prądu stałego
3-faz. napięcie przemienne (AC)
3-faz. napięcie przemienne (AC)
Prąd stały (DC)
Silnik asynchroniczny/indukcyjny
Silnik synchroniczny
Napięcie stałe (DC)
Silnik prądu stałego
z magnesami trwałymi
Silnik synchroniczny
z magnesami trwałymi
3-faz. napięcie prostokątne
3-faz. napięcie przemienne (AC)
Silnik bezszczotkowy
prądu stałego
z magnesami trwałymi
i komutatorem elektronicznym
6
3-faz. napięcie przemienne (AC)
Silnik bezszczotkowy
prądu przemiennego
z magnesami trwałymi
i komutatorem elektronicznym
dr inż. Michał Michna
3-faz. napięcie przemienne (AC)
Silnik synchroniczny
reluktancyjny
Kluczowane sekwencyjnie
napięcie stałe (DC)
Silnik o przełączanej reluktancji
z komutatorem elektronicznym
2013-03-29
Silnik indukcyjny klatkowy
Zalety
Prosta konstrukcja,
Niskie koszty produkcji i eksploatacji
Brak komutatora i pierścieni ślizgowych
(silnik bezszczotkowy)
Małe tętnienia momentu
Wady
7
Mała szczelina powietrzna – niski współczynnik mocy
Niska wydajność przy małych prędkościach
Moment proporcjonalny do kwadratu napięcia zasilania
Możliwość pękania prętów wirnika
Niska sprawność, mały współczynnik mocy
dr inż. Michał Michna
2013-03-29
Silnik indukcyjny klatkowy
Zalety
Prosta konstrukcja,
Niskie koszty produkcji i eksploatacji
Brak komutatora i pierścieni ślizgowych
(silnik bezszczotkowy)
Małe tętnienia momentu
Wady
8
Mała szczelina powietrzna – niski współczynnik mocy
Niska wydajność przy małych prędkościach
Moment proporcjonalny do kwadratu napięcia zasilania
Możliwość pękania prętów wirnika
Niska sprawność, mały współczynnik mocy
dr inż. Michał Michna
2013-03-29
Silnik bezszczotkowy z MT
Zalety
Brak szczotek (bezszczotkowa)
Dobre przenoszenie ciepła i łatwe chłodzenie - źródłem ciepła
stojan
Większa szczelina niż w IM i SRM
Brak strat wzbudzenia - wysoka sprawność
Wysoka gęstość mocy
Współczynnik mocy bliski cosf=1
Bardzo dobre parametry dynamiczne
Wady
9
Magnesy trwałe są wrażliwe na temperaturę, a tym samym
parametry silnika zależą od temperatury
Droższe niż IM i SRM
Wymagają układu zasilnia i sterowania
dr inż. Michał Michna
2013-03-29
Silnik bezszczotkowy z MT
Zalety
Brak szczotek (bezszczotkowa)
Dobre przenoszenie ciepła i łatwe chłodzenie - źródłem ciepła
stojan
Większa szczelina niż w IM i SRM
Brak strat wzbudzenia - wysoka sprawność
Wysoka gęstość mocy
Współczynnik mocy bliski cosf=1
Bardzo dobre parametry dynamiczne
Wady
10
Magnesy trwałe są wrażliwe na temperaturę, a tym samym
parametry silnika zależą od temperatury
Droższe niż IM i SRM
Wymagają układu zasilnia i sterowania
dr inż. Michał Michna
2013-03-29
Silnik bezszczotkowy z MT
Silniki z magnesami trwałymi
Komutatorowe silniki
prądu stałego
Silniki bezszczotkowe
Bezszczotkowe silniki
prądu stałego
11
Silniki skokowe
Bezszczotkowe silniki
prądu przemiennego
dr inż. Michał Michna
2013-03-29
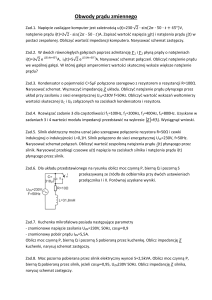
Silnik bezszczotkowy z MT
12
dr inż. Michał Michna
2013-03-29
Silnik bezszczotkowy z MT
4
45
17
30
17
5
5
57
120
120
5
1
57
4
37
17
57
3
120
7
3
R 40
2
6
13
R 40
5
6
dr inż. Michał Michna
2013-03-29
R 40
Silnik bezszczotkowy z MT
mocowanie powierzchniowe MT mocowanie zagłębione MT
indukcja w szczelinie mniejsza niż indukcja indukcja w szczelinie może być większa od
remanencji
indukcji remanencji
prosta konstrukcja silnika
konstrukcja stosunkowo złożona
mała moc obwodów twornika
duża moc obwodów twornika, droższy
przekształtnik
magnesy nie są zabezpieczone przed
odmagnesowaniem
magnesy są zabezpieczone przed
odmagnesowaniem
mała odporność na działanie sił
odśrodkowych
prądy wirowe w magnesach trwałych
odporność na działanie sił odśrodkowych
ograniczone możliwości pracy w stanie
odwzbudzenia
14
brak prądów wirowych w magnesach
trwałych
możliwość pracy przy osłabionym polu
wzbudzenia
stosunkowo prosta możliwość
kształtowania rozkładu pola w szczelinie
dr inż. Michał Michna 2013-03-29
roboczej
Silnik bezszczotkowy z MT
IM
SBMT
Sprawność
Średnia (70-96%)
Wysoka (93-95%)
wsp. mocy
0,7 - 0,86
>0,94
straty mocy
stojan i wirnik
stojan
szczelina
powietrzna
mała, harmoniczne
żłobkowe, hałas
duża
wsp. moc/masa
średni (75W/kg)
duży (160W/kg)
konstrukcja
wirnika
prosta, wytrzymała
prosta lub złożona,
podatność MT na siły
odśrodkowe
cena
niska
wysoka
15
dr inż. Michał Michna
2013-03-29
Silnik bezszczotkowy z MT
Melfi, M.J.; Rogers, S.D.; Evon, S.; Martin, B. Permanent Magnet
Motors for Energy Savings in Industrial Applications. PPIC 2008
16
dr inż. Michał Michna
2013-03-29
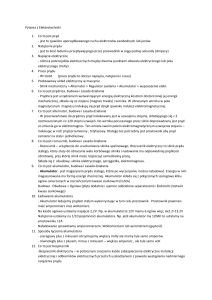
Silnik reluktancyjny przełączalny SRM
Kolejne pasma silnika SRM zasilane są ze źródła
napięcia stałego w funkcji położenia wirnika
Wymaga zastosowania bardzo szybkich kluczy
energoelektronicznych (MOSFET, IGBT)
Moment jest wytwarzany przez magnetyczne
przyciąganie wirnika do elektromagnesów stojana
C’
C’
D’
B’
A
B’
A’
A’
A
B
D
C
17
dr inż. Michał Michna
B
C
2013-03-29
Silnik reluktancyjny przełączalny SRM
Zalety
duża niezawodność
niski koszt produkcji
prosta budowa – brak magnesów, brak uzwojeń
mały moment bezwładności wirnika
wyższa sprawność w porównaniu np. z silnikami
indukcyjnymi
dokładna regulacja prędkości obrotowej, uzyskiwana
tanim kosztem przez zastosowanie układów
bezczujnikowych
Wady
18
hałas akustyczny
tętnienia momentu obrotowego
dr inż. Michał Michna
2013-03-29
Maszyny elektryczne
19
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
20
dr inż. Michał Michna
2013-03-29
T
Moc czynna
1
P ms e(t )i(t )dt ms K P Em I m
T 0
Współczynnik
kształtu mocy
1 e(t ) i(t )
KP
dt
T 0 Em I m
Rozkład indukcji
w szczelnie
B(t , x) Bm sin x t
s
Ds
s
2p
Podziałka biegunowa
T
s
Strumień sprzężony
z uzwojeniem
(t ) B(t , x) d t ls B(t , x) dx
Współczynniki
kształtu pola
BAV 2
kB
BM
21
0
A
dr inż. Michał Michna
2013-03-29
Amplituda strumienia
m K B (li ps ) Bm
Napięcie indukowane
d (t )
e(t ) N
dt
Liczba zwojów
N K ws N s
Amplituda napięcia
Em K B K wsBm N s (li ps )
f
Em ( K B K ws )( Ds li ) N s Bm
p
f
Em K E ( Ds li ) N s Bm
p
e(t )
K E sin(t )
Em
2
K E 2 ( K B K ws )
23
dr inż. Michał Michna
2013-03-29
Okład prądowy
liniowa gęstość prądu
2 NI rms
A ms
Ds
Okład prądowy
stojana i wirnika
A As Ar As K r As As (1 K r )
Im
KI
I rms
I m K I I rms
24
Im
1 T
2
i
(
t
)
dt
0
T
K I ADs
1 K r 2 N s ms
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
Współczynniki konstrukcyjne
Objętość maszyny
Prędkość maszyny
1
f
2
P
K I K P K E ABm Ds ls
2 1 Kr
p
Okład prądowy
Indukcja w szczelnie
Równanie konstrukcyjne – ang.sizing equation
25
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
26
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
27
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
28
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
Równanie konstrukcyjne – ang.sizing equation
29
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
1
f
2
P
K I K P K E ABm Ds ls
2 1 Kr
p
współczynnik wyzyskania maszyny
Równanie konstrukcyjne – ang.sizing equation
30
dr inż. Michał Michna
2013-03-29
Współczynnik wyzyskania maszyny
2Ti
F
Ds
F
A
A Ds ls
1
2
Ti
K I K P K E ABm Ds ls
m 2 1 K r
Si
1
K I K P K E ABm
1 Kr
31
dr inż. Michał Michna
2013-03-29
Współczynnik wyzyskania maszyny
32
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
Równanie konstrukcyjne – ang.sizing equation
33
dr inż. Michał Michna
2013-03-29
Indukcja w szczelnie
34
dr inż. Michał Michna
2013-03-29
Moc wewnętrzna
1
f
2
P
K I K P K E ABm Ds ls
2 1 Kr
p
Okład prądowy
Równanie konstrukcyjne – ang.sizing equation
35
dr inż. Michał Michna
2013-03-29
Gęstość liniowa prądu – okład prądowy
36
dr inż. Michał Michna
2013-03-29